Пристрій для орієнтації штучних вантажів
Номер патенту: 7395
Опубліковано: 29.09.1995
Автори: Сухой Леонід Олександрович, Горшунов Вячеслав Петрович, Сніховський Володимир Маркович, Бурляй Юрій Васильович
Формула / Реферат
1. Устройство для ориентации штучных грузов, включающее подающий и принимающий транспортеры с направляющими, и переворачивающий механизм в виде ротора с каналами для грузов на многогранной поверхности, отличающееся тем, что, с целью повышения производительности и исключения повреждения грузов, принимающий и подающий транспортеры выполнены вибрационными и снабжены пневматическим приводом, а ротор снабжен щелевым вакуум-захватом и выполнен из набора многогранных пластин, причем каналы для грузов расположены перпендикулярно оси вращения ротора.
2. Устройство по п. 1, отличающееся тем, что щелевой вакуум-захват выполнен в виде многоканального воздухораспределителя, связанного с источником вакуума воздуховодных каналов и щелевых отверстий, причём воздухораспределитель установлен на валу ротора и связан с атмосферой и воздуховоднымй каналами, расположенными параллельно оси вращения ротора и сообщающиеся с щелевыми отверстиями между пластинами ротора.
Текст
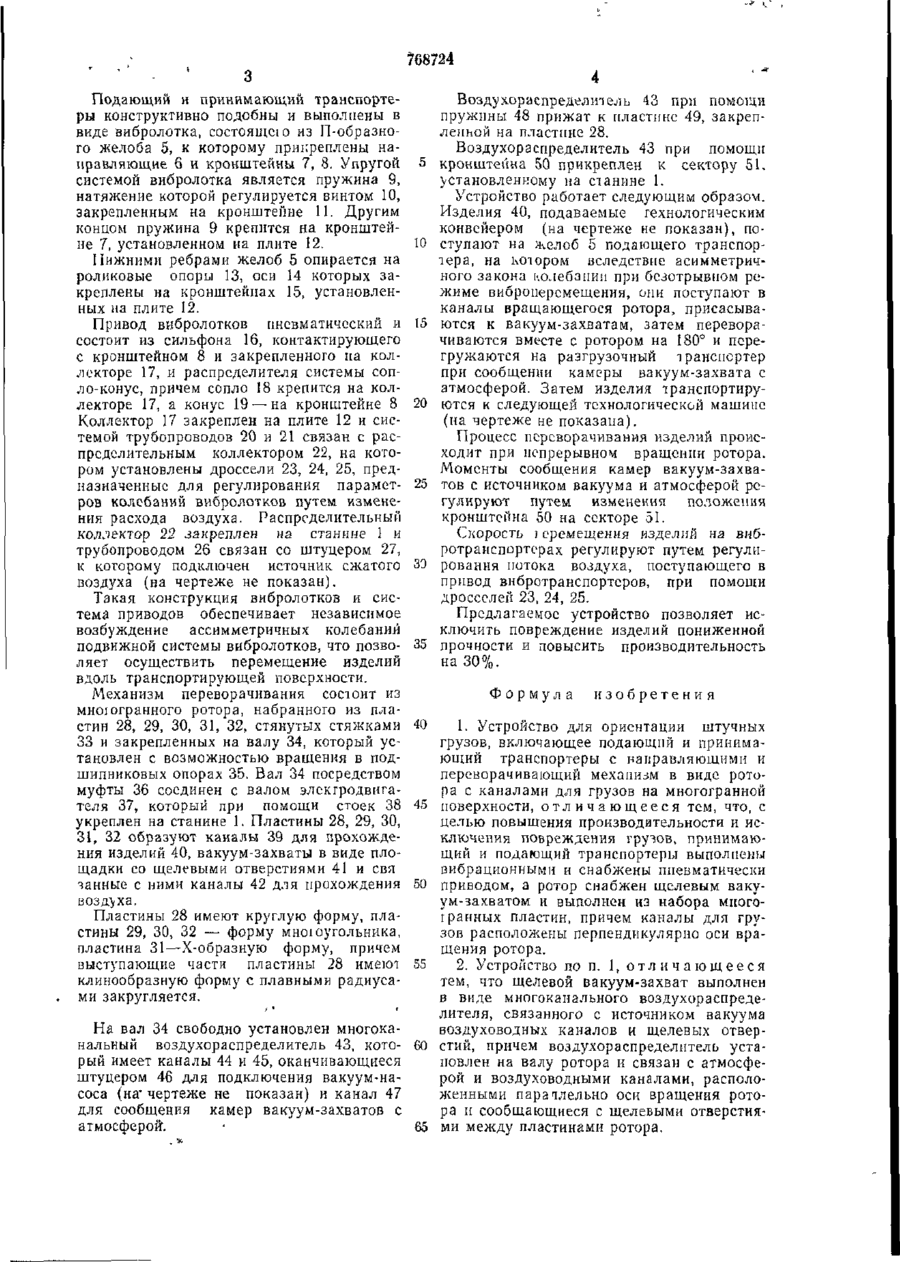
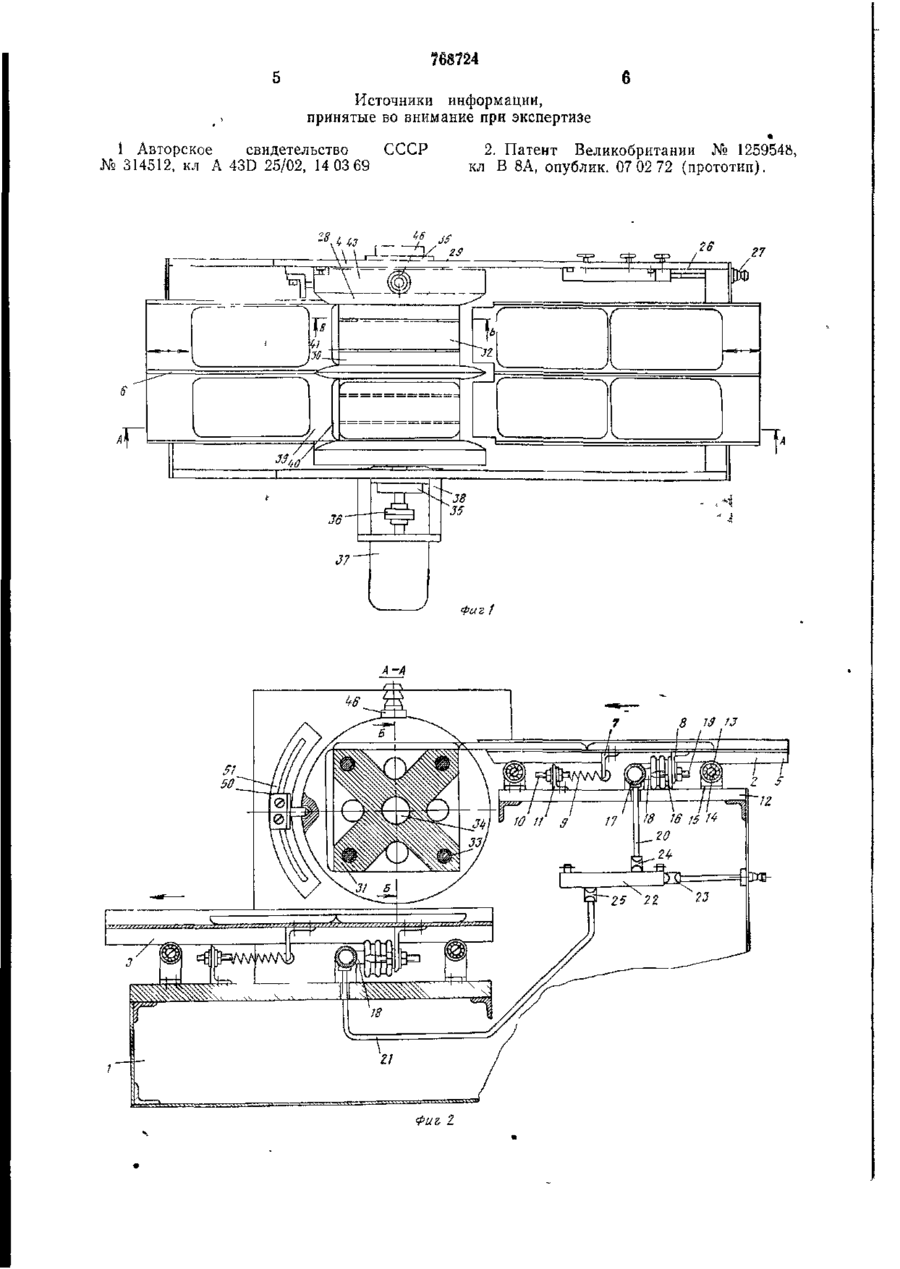
Ссюз Советских Р Социалистических Республик ван eas: Е ЕЯ Д Д І І г НИ & ; К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) Дополнительное к авт. свид-ву — (5])МКл.3 В 65G 47/91 (22) Заявлено 13.09.78 (21) 2664327/27-03 с присоединением заявки № — Государственный комитет СССР по делам изобретений и открытий (23) Приоритет — (53) УДК 621.869.7.666 .198(088.8) (43) Опубликовано 07.10.80. Бюллетень № 37 (45) Дата опубликования описания 07.10.80 | (72) Авторы изобретения (71) Заявитель Ю. В. Бурляй, В. М. Сниховский, Л. А. Сухой и В. П. Горшунов Украинский научно-исследовательский и конструкторский институт продовольственного машиностроения (54) УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ШТУЧНЫХ ГРУЗОВ 1 Предлагаемое устройство относится к кондитерской промышленности и предназначено для использования Б системах литания изделиями пониженной прочности упаковочных машин, в частности, в устройствах для перегрузки, ориентирования, сортировки, группирования изделий и других устройствах. Известно устройство, в котором переворачивание изделий происходит вдоль направления движения при помощи аэродинамического ножа [1]. . Однако в данном устройстве имеет место возможность повреждения изделий при захвате и перегрузке их захватными приспособлениями. Наиболее близким по технической сущности и достигаемому результату к предлагаемому устройству является устройство для ориентации штучных грузов, включающее подающий и принимающий транспортеры с направляющими и переворачивающий механизм в виде ротора с каналами для грузов на многогранной поверхности 5 10 15 20 25 [2]. Однако данное устройство не исключает возможность повреждения грузов при ориентации. Целью изобретения является повышение 30 производительности и исключение повреждения грузов. Указанная цель достигается тем, что принимающий и подающий транспортеры выполнены вибрационными и снабжены пневматическим приводом, а ротор снабжен щелевым вакуум-захватом и выполнен из набора многогранных пластин, причем каналы для грузов расположены перпендикулярно оси вращения ротора, при этом щелевой вакуум-захват выполнен в виде многоканального воздухораспределителя, связанного с источником вакуума, воздуховодньгх каналов и щелевых отверстий, причем воздухораспределитель установлен на валу ротора и связан с атмосферой и воздуховодными каналами, расположенными параллельно оси вращения ротора и сообщающимися с щелевыми отверстиями между пластинами ротора. На фиг. 1 изображен общий вид устройства для ориентации штучных грузов; на фиг. 2 — сечение А—А фиг. 1; на фиг. 3 — сечение Б—Б фиг. 2; на фиг. 4 — сечение В—В фиг. 1. Устройство для ориентации штучных грузов состоит из сварной станины 1, на которой закреплены подающий 2 и принимающий 3 транспортеру ^механизм переворачивания 4. 768724 Подающий и принимающий транспортеры конструктивно подобны и выполнены в виде вибролотка, состоящею из П-образного желоба 5, к которому прикреплены направляющие 6 и кронштейны 7, 8. Упругой системой вибролотка является пружина 9, натяжение которой регулируется винтом 10, закрепленным на кронштейне 11. Другим концом пружина 9 крепится на кронштейне 7, установленном на плите 12. Нижними ребрами желоб 5 опирается на роликовые опоры 13, оси 14 которых закреплены на кронштейнах 15, установленных на плите 12. Привод вибролотков пневматический и состоит из сильфона 16, контактирующего с кронштейном 8 и закрепленного па коллекторе 17, и распределителя системы сопло-конус, причем сопло 18 крепится на коллекторе 17, а конус 19 — н а кронштейне 8 Коллектор 17 закреплен на плите 12 и системой трубопроводов 20 и 21 связан с распределительным коллектором 22, на котором установлены дроссели 23, 24, 25, предназначенные для регулирования параметров колебаний вибролотков путем изменения расхода воздуха. Распределительный коллектор 22 закреплен на станине 1 и трубопроводом 26 связан со штуцером 27, к которому подключен источник сжатого воздуха (на чертеже не показан). Такая конструкция вибролотков и система приводов обеспечивает независимое возбуждение ассимметричных колебаний подвижной системы вибролотков, что позволяет осуществить перемещение изделий вдоль транспортирующей поверхности. Механизм переворачивания состоит из многогранного ротора, набранного из пластин 28, 29, 30, 31, 32, стянутых стяжками 33 и закрепленных на валу 34, который установлен с возможностью вращения в подшипниковых опорах 35. Вал 34 посредством муфты 36 соединен с валом электродвигателя 37, который при помощи стоек 38 укреплен на станине 1. Пластины 28, 29, 30, 31, 32 образуют каналы 39 для прохождения изделий 40, вакуум-захваты в виде площадки со щелевыми отверстиями 41 и свя занные с ними каналы 42 для прохождения воздуха. Пластины 28 имеют круглую форму, пластины 29, 30, 32 — форму многоугольника, пластина 31—Х-образную форму, причем выступающие части пластины 28 имеют клинообразную форму с плавными радиусами закругляется. 5 10 15 20 25 ЗЭ 35 Воздухораспределитель 43 при помощи пружины 48 прижат к пластине 49, закрепленной на пластине 28. Воздухораспределитель 43 при помощи кронштейна 50 прикреплен к сектору 51. установленному на станине 1. Устройство работает следующим образом. Изделия 40, подаваемые технологическим конвейером (на чертеже не показан), поступают на желоб 5 подающего транспортера, на котором вследствие асимметричного закона колебании при безотрывном режиме виброперсмещения, они поступают в каналы вращающегося ротора, присасываются к вакуум-захватам, затем переворачиваются вместе с ротором на 180° и перегружаются на разгрузочный транспортер при сообщении камеры вакуум-захвата с атмосферой. Затем изделия транспортируются к следующей технологической машине (на чертеже не показана). Процесс переворачивания изделий происходит при непрерывном вращении ротора. Моменты сообщения камер вакуум-захватов с источником вакуума и атмосферой регулируют путем изменения положения кронштейна 50 на секторе 51. Скорость і еремещения изделий на вибротранспортерах регулируют путем регулирования потока воздуха, поступающего в привод вибротранспортеров, при помощи дросселей 23, 24, 25. Предлагаемое устройство позволяет исключить повреждение изделий пониженной прочности и повысить производительность на 30%. Формула 40 45 50 55 На вал 34 свободно установлен многоканальный воздухораспределитель 43, кото- 60 рый имеет каналы 44 и 45, оканчивающиеся штуцером 46 для подключения вакуум-насоса (на" чертеже не показан) и канал 47 для сообщения камер вакуум-захватов с атмосферой". 65 изобретения 1. Устройство для ориентации штучных грузов, включающее подающий и принимающий транспортеры с направляющими и переворачивающий механизм в виде ротора с каналами для грузов на многогранной поверхности, о т л и ч а ю щ е е с я тем, что, с целью повышения производительности и исключения повреждения грузов, принимающий и подающий транспортеры выполнены вибрационными и снабжены пневматически приводом, а ротор снабжен щелевым вакуум-захватом и выполнен из набора многогранных пластин, причем каналы для грузов расположены перпендикулярно оси вращения ротора. 2. Устройство по п. 1, о т л и ч а ю щ е е с я тем, что щелевой вакуум-захват выполнен в виде многоканального воздухораспределителя, связанного с источником вакуума воздуховодных каналов и щелевых отверстий, причем воздухораспределитель установлен на валу ротора и связан с атмосферой и воздуховодными каналами, расположенными паратлельно оси вращения ротора и сообщающиеся с щелевыми отверстиями между пластинами ротора. 768724 5 6 Источники информации, принятые во внимание при экспертизе 1 Авторское свидетельство № 314512, кл A 43D 25/02, 14 03 69 СССР 2. Патент Великобритании № 125954В, кл В 8А, опублик. 07 02 72 (прототип). Фиг 1 А-А 8 13 TJ ! I Фиь Z 768724 Б-6 Фиг J Фиг Составитель Т. Щеглакова Редактор Т. Авдейчик Техред И. Заболотнова Корректор А. Акашева Заказ 2263/9 Изд № 506 Тираж 914 Подписное НПО «Поиск» Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб, д 4/5 Типография, пр. Сапунова, 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for orientating piece freight
Автори англійськоюBurliai Yurii Vasyliovych, Snikhovskyi Volodymyr Markovych, Sukhoi Leonid Oleksandrovych, Horshunov Viacheslav Petrovych
Назва патенту російськоюУстройство для ориентации штучных грузов
Автори російськоюБурляй Юрий Васильевич, Сниховский Владимир Маркович, Сухой Леонид Александрович, Горшунов Вячеслав Петрович
МПК / Мітки
МПК: B65G 47/91
Мітки: орієнтації, вантажів, пристрій, штучних
Код посилання
<a href="https://ua.patents.su/4-7395-pristrijj-dlya-oriehntaci-shtuchnikh-vantazhiv.html" target="_blank" rel="follow" title="База патентів України">Пристрій для орієнтації штучних вантажів</a>
Контейнер для транспортування штучних вантажів
Номер патенту: 4508
Опубліковано: 27.12.1994
Автори: Бегляров Едуард Михайлович, Михиєнко Віктор Дмитрович, Чурилов Володимир Васильович, Распутько Григорій Семенович
МПК: B65D 85/00
Мітки: штучних, контейнер, вантажів, транспортування
Формула / Реферат:
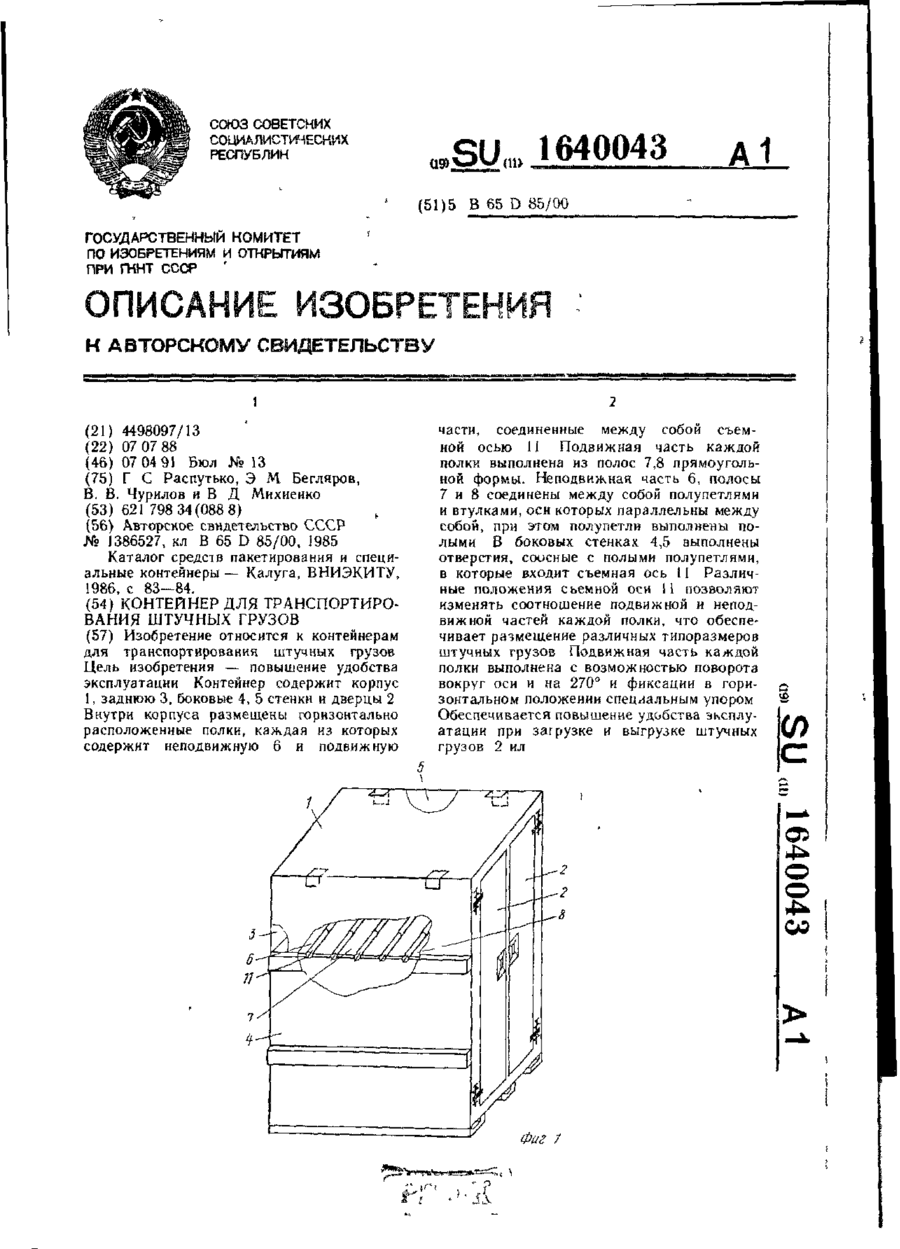
Контейнер для транспортирования штучных грузов, преимущественно огнеупорных изделий, содержащий корпус прямоугольной формы с дверьми, задней и боковыми стенками и размещенные внутри корпуса горизонтальные полки, каждая из которых состоит из расположенных у дверей подвижной части и закрепленной у задней стенки корпуса неподвижной части, связанных между собой посредством оси, отличающийся тем, что, с целью повышения удобства в...
Установка для пневмотранспортування штучних вантажів
Номер патенту: 5116
Опубліковано: 28.12.1994
Автори: Заславський Броніслав Леонідович, Назаревський Сергій Вікторович, Потураєв Валентин Микитович, Французов Вадим Іванович, Волошин Олексій Іванович
МПК: B65G 51/00
Мітки: пневмотранспортування, штучних, установка, вантажів
Формула / Реферат:
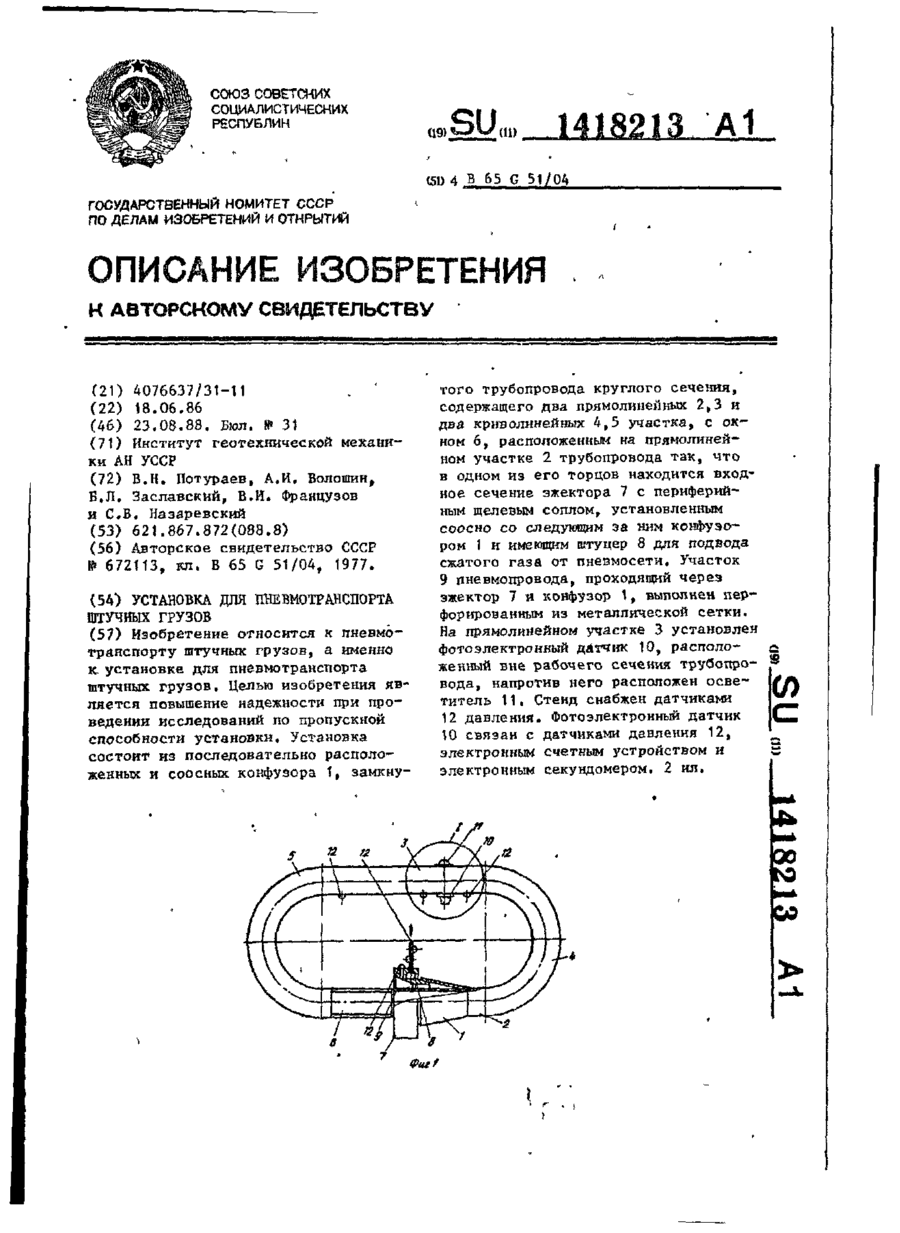
Установка для пневмотранспорта штучных грузов, содержащая замкнутый трубопровод, выполненный с перфорацией на прямолинейном участке и с окном для ввода и вывода штучных грузов, и смонтированную на замкнутом трубопроводе в зоне перфорации соосно ему емкость, сообщенную через нагнетательный патрубок с источником подачи воздуха, отличающаяся тем, что, с целью повышения надежности при проведении исследований по пропускной способности...
Пристрій орієнтації на світлове випромінювання
Номер патенту: 5615
Опубліковано: 28.12.1994
Автори: Литвиненко Сергій Васильович, Кильчицька Світлана Сергіївна
МПК: F24J 2/24
Мітки: пристрій, світлове, орієнтації, випромінювання
Формула / Реферат:
(57) 1. Устройство ориентации на световое излучение, содержащее ориентируемый приемник излучения, сопряженный посредством механической передачи с компенсирующим электродвигателем, ось ротора которого жестко связана с входным валом механической передачи, а также фотоэлементы для питания электродвигателя, отличающееся тем, что устройство дополнительно содержит закрепленный на роторе несущий элемент, фотоэлементы размещены на его боковой...
Пристрій для закріплення вантажів в вагоні
Номер патенту: 6290
Опубліковано: 29.12.1994
Автори: Жовтобрюх Григорій Дем'янович, Шіпілов Геннадій Васильович, Слюсар Інна Іванівна, Чебикін Вячеслав Михайлович, Дураченко Михайло Іванович
МПК: B61D 45/00
Мітки: вагони, пристрій, вантажів, закріплення
Формула / Реферат:
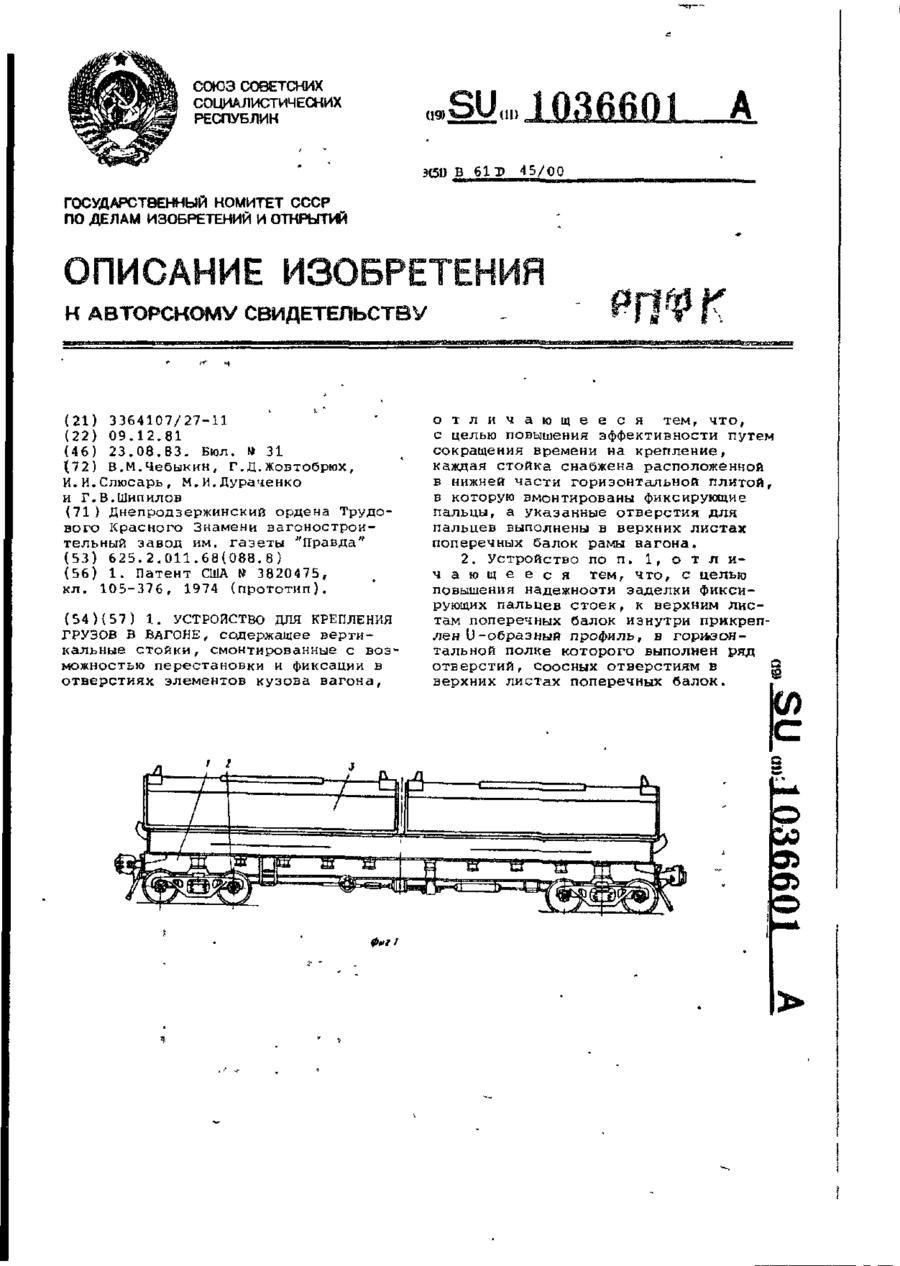
1. Устройство для крепления грузов в вагоне, содержащее вертикальные стойки, смонтированные с возможностью перестановки и фиксации в отверстиях элементов кузова вагона, отличающееся тем, что, с целью повышения эффективности путем сокращения времени на крепление, каждая стойка снабжена расположенной в нижней части горизонтальной плитой, в которую вмонтированы фиксирующие пальцы, а указанные отверстия для пальцев выполнены в верхних листах...
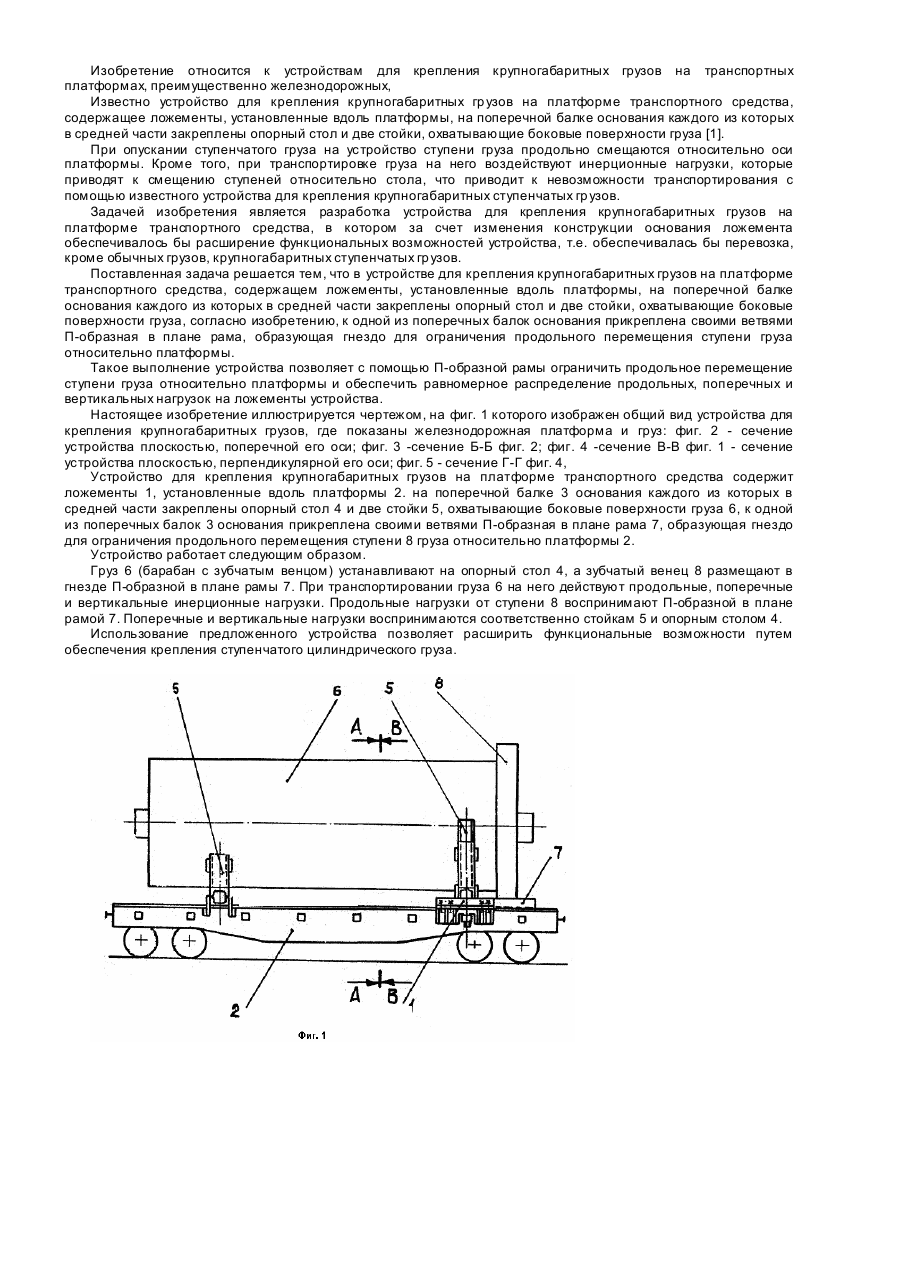
Пристрій для кріплення великогабаритних вантажів на платформі транспортного засобу
Номер патенту: 4601
Опубліковано: 28.12.1994
Автори: Лавренов Борис Миколайович, Шінкарєнко Владімір Ніколаєвіч, Малов Арнольд Дмітрієвіч, Завгородній Іван Павлович
МПК: B60P 7/06
Мітки: вантажів, пристрій, транспортного, засобу, платформи, кріплення, великогабаритних
Формула / Реферат:
Устройство для крепления крупногабаритных грузов на платформе транспортного средства, содержащее ложементы, установленные вдоль платформы, на поперечной балке основания каждого из которых в средней части закреплены опорный стол и две стойки, охватывающие боковые поверхности груза, отличающееся тем, что к одной из поперечных балок основания прикреплена своими ветвями П-образная в плане рама, образующая гнездо для ограничения продольного...
Попередній патент: Хлібопекарська піч
Наступний патент: Захват маніпулятора
Випадковий патент: Пристрій для запису і/або зчитування інформації