Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата
Номер патенту: 83861
Опубліковано: 26.08.2008
Автори: Шептун Юрій Дмитрович, Манойленко Олександр Олексійович


Формула / Реферат
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата шляхом вимірювання кутових швидкостей та кутів тангажа, рискання і крену, порівняння виміряних значень з заданими, формування основних сигналів керування ракетою згідно з помилками регулювання, який відрізняється тим, що на кожному такті керування ракетою з моменту відключення рухомої установки і до моменту відділення космічного апарата формують в каналах тангажа і рискання додаткові сигнали, пропорційні максимальним можливим приростам кутових швидкостей ракети в цих каналах протягом одного такту керування, які обумовлені можливою різнотяговістю сопел рухомої установки, формують компенсаційні сигнали, пропорційні додатковим сигналам і сигналам фактичних кутових швидкостей ракети, формують керуючі сигнали на приводи сопел рухомої установки шляхом додавання компенсаційних сигналів до основних сигналів керування.
Текст
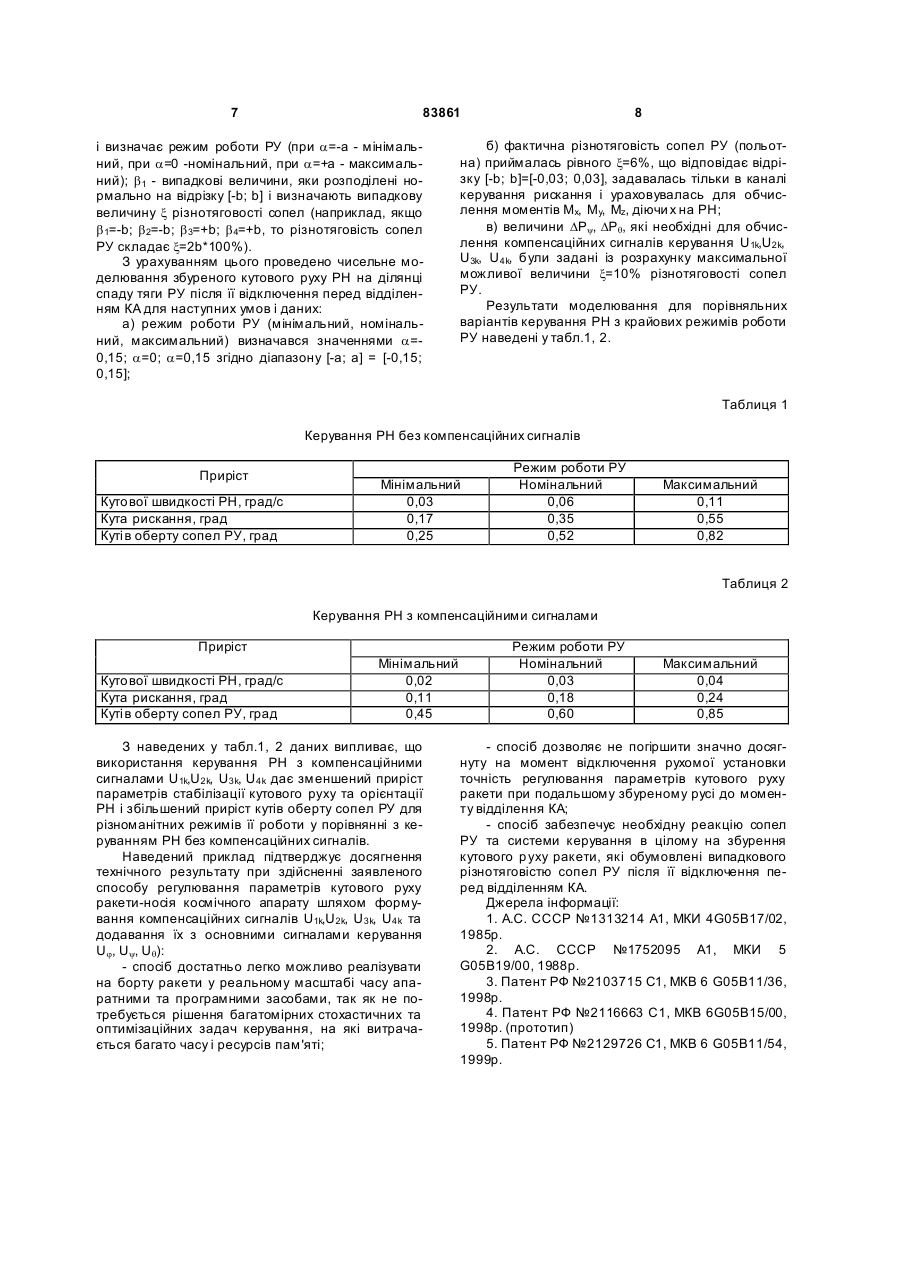
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата шляхом вимірю 3 83861 нізації процесу ідентифікації зовнішніх збурень при кутовому р усі ЛА і використання отриманої інформації для формування додаткової складової керуючого сигналу, яка пропорційна величині моменту збурюючих з усиль. Регулювання вихідної величини виконується на основі різниці фактичного і програмного значень, кутової швидкості, квадрата норми вектора кутової швидкості та змінної складової сигналу керування. Крім цього оцінюється інерційний момент об'єкту керування. Однак цей спосіб не забезпечує достатньо високу точність регулювання, так як не враховує вплив на ЛА випадкових збурень та флюктуацій параметрів зовнішнього середовища. Найбільш близьким технічним рішенням, обраним за прототип, є спосіб регулювання динамічних об'єктів [4] за [а.с. №2116663] шляхом вимірювання вихідної координати об'єкта керування, порівняння виміряного значення з заданим, формування в детермінованому регуляторі керуючого впливу (сигналу) на об'єкт керування згідно з помилкою регулювання вихідної координати. При цьому для підвищення динамічної точності регулювання вихідної координати об'єкта на сталому режимі в контурі керування використовується адаптивний стохастичний регулятор, який ураховує випадкові флюктуації параметрів зовнішнього середовища та об'єкта керування і базується на наступних операціях на кожному такті керування об'єктом: - формують одномірний масив даних, відповідний діапазону можливих змін вихідної регулюємої координати об'єкту керування і одномірний масив значень керуючого впливу (сигналу) на об'єкт. На основі цих масивів будують двомірний масив оцінок ймовірностей переходу об'єкту керування з фактичного стану в потрібний. Значення ймовірностей визначаються на основі аналізу априорних статистичних даних про роботу об'єкта керування; - формують керуючий вплив (сигнал) на об'єкт керування з використанням методу Монте-Карло і подають його на об'єкт; - оновлюють значення ймовірностей переходу об'єкта керування із стану в стан. Недоліком цього способу є те, що реалізація способу стосовно для задач керування ракетиносія в реальному масштабі часу достатньо складна, так як потребує багато часу і ресурсів пам'яті для рішення на борту сто хастичних та оптимізаційних задач керування з використанням методу Монте-Карло для випадку регулювання багатьох вихідних параметрів (наприклад, трьох кутів орієнтації та трьох проекцій кутової швидкості ракети). Крім цього процес регулювання базується тільки на урахуванні різниці фактичного і програмного значень вихідної величини (помилки регулювання) і не ураховує похідної за часом цей помилки, що не забезпечує достатньо високої динамічної точності регулювання параметрів збуреного руху об'єкту керування. Задачею заявленого винаходу є розробка процесу регулювання параметрів кутового руху ракети і формування сигналів керування на ділянці польоту з моменту відключення сопел РУ ракети і до моменту відділення КА (цей відрізок може бути 4 значним, декілька секунд), який дозволяє зберегти параметри кутової орієнтації та стабілізації ракети на досягнутому к моменту відключення сопел РУ рівні або припускає незначне збільшення цього рівня при подальшому збуреному кутовому р усі ракети. Збурений кутовий рух ракети на цій ділянці буде обумовлений, в тому числі, можливою (випадковою) різнотяговістю сопел РУ після її відключення. У зв'язку з цим в контурі керування ракетою при формуванні сигналів керування на приводи обертів сопел РУ на кожному такті керування додатково формують компенсаційні сигнали, які ураховують різнотяговість сопел, а також дають можливість не погіршити значно точність регулювання параметрів кутового р уху ракети на ділянці з моменту відключення РУ і до моменту відділення КА. Задача вирішується тим, що у способі регулювання параметрів кутового руху ракети-носія космічного апарату шляхом вимірювання кутових швидкостей та кутів тангажа, рискання і крену, порівняння виміряних значень з заданими, формування основних сигналів керування ракетою згідно з помилками регулювання, виконують додатково наступне: - на кожному такті керування ракетою з моменту відключення рухомої установки і до моменту відділення космічного апарату формують в каналах тангажа і рискання додаткові сигнали, пропорційні максимальним можливим приростам кутових швидкостей ракети в цих каналах на протязі одного такту керування, які обумовлені можливоюрізнотяговістю сопел рухомої установки; - формують компенсаційні сигнали, пропорційні додатковим сигналам і сигналам фактичних кутових швидкостей ракети; формують керуючі сигнали на приводи обертів сопел рухомої установки шляхом додавання компенсаційних сигналів з основними сигналами керування. Заявлений спосіб здійснюється таким чином: 1) На кожному такті керування ракетою (тобто в кожний дискретний момент часу t=nТ, n=1,2,...) з моменту відключення рухомої установки і до моменту відділення космічного апарату вимірюють вихідні координати кутового руху ракети (кути тангажа, рискання і крену та кутові швидкості в цих каналах); порівнюють виміряні значення з заданими і визначають помилки кутової орієнтації та стабілізації ракети; формують керуючий вплив на ракету згідно з помилками регулювання вихідних координат - основні сигнали керування Uj, Uy, Uq кутовим рухом ракети, як функції помилок кутової орієнтації j y q по крену, рисканню і тангажу та кутови х qшвидкостей j, y, q ракети в цих каналах & & & (тобто реалізують ПД - регулювання): Uj = k1j + k 2j ; & Uy = k 1y + k 2y ; & & Uq = k 1q + k 2q, де k1, k2 - коефіцієнти підсилення; j, y, q - кути орієнтації зв'язаних осей ракети відносно осей програмної зв'язаної системи координат (помилки кутової орієнтації). 5 83861 2) 3 метою контролю та урахування впливу можливого режиму різнотяговості керуючих сопел РУ, який характеризується конкретним значенням випадкової величини x (у відсотках), формують додаткові сигнали Dy, D q , пропорційні максималь& & ним можливим приростам кутових швидкостей РН в каналах рискання і тангажа, які отримає ракета за час T, рівний такту формування керуючих сигналів d1, d2,d3 ,d4 на приводи обертів сопел РУ, згідно з формулами: Dy = & & Dq = DPyR zT Jy DPqR y T Jz ; ; де Ry, RZ - плече сили тяга сопла РУ в каналі тангажа і рискання відповідно; DPy, DPq - величини 6 (в одиницях тяга), відповідні максимальному можливому значенню випадкової величини x різнотяговості сопел РУ в каналах рискання і тангажа; Ix,I y,Iz – головні центральні моменти інерції ракети. Знаки сигналів Dy, Dq визначаються знаками & & фактичних кутови х прискорень РН в каналах рискання і тангажа, які будуть обумовлені фактичною різнотяговістю сопел РУ, реалізованою у польоті. Модулі цих величин приймають постійні значення. 3) 3 метою забезпечення необхідної якості керування, щодо точності кутової орієнтації та стабілізації РН і реакції системи керування на можливі прирости кутів орієнтації та кутових швидкостей РН в каналах тангажа і рискання, на основі додаткових сигналів Dy, Dq формують компенсаційні & & сигнали U1k,U2k, U3k, U4k для керуючи х сопел РУ згідно з логікою: & & & 1 & & - якщоq > y , то U2k = U3k = -DUq sin gq; U k = U4k = DUq sin gq; DUq = k3 Dq; & - якщ о q < y , то U1k = U2k = - DUy sin gy; U3 k = U4k = DUy singy; DUy = k 3 Dy ; & & & & де k3 - коефіцієнт підсилення; j, y, q - кутові & & & швидкості ракети (помилки кутової стабілізації). 4) Формують керуючі сигнали d1, d2,d3 ,d4 на приводи обертів сопел РУ шляхом додавання основних Uj ,U y , Uq та компенсаційних U1k, U2k, U3k, U4k си гналів: d1 = Uj - Uy - U q + U1k; d2 = U j + U y - Uq + U2k ; d3 = U j + U y + Uq + U3 k; d 4 = Uj - Uy + U q + U4 , Згідно з цими сигналами далі за допомогою тяг сопел рухомої установки будуть створені керуючі моменти, які впливають на кутовий рух ракети: Мj=Mj( P1,P2 ,P3 ,P4, d1, d2,d3 ,d4 ), j=x,y,z, де P1,P2 ,P3,P 4 - тяги сопел РУ. Використання заявленого способу регулювання у порівнянні зі способом-прототипом має наступні переваги: - спосіб достатньо легко можливо реалізувати на борту ракети у реальному масштабі часу апаратними та програмними засобами, так як не потребується рішення багатомірних стохастичних та оптимізаційних задач керування, на які витрачається багато часу і ресурсів пам'яті; - спосіб дозволяє не погіршити значно досягнуту на момент відключення рухомої установки точність регулювання параметрів кутового руху ракети при подальшому збуреному русі до моменту відділення КА; - спосіб забезпечує необхідну реакцію сопел РУ та системи керування в цілому на збурення кутового руху ракети, які обумовлені випадковою різнотяговістю сопел РУ після її відключення перед відділенням КА. Приклад здійснення пропонуємого способу регулювання параметрів кутового руху ракети-носія космічного апарату, яка вміщує РУ з чо тирма обертальними керуючими соплами і виконує керування ракетою в каналах крена, рискання і тангажа одночасно. Сопла встановлені в площинах, які складають кути 45° з площинами стабілізації ракети І-ІІІ та II-IV. Оберти сопел виконуються за допомогою приводів в напрямках, які перпендикулярні установочним площинам сопел. Динаміка кутового руху РН у програмній зв'язаній системі координат задана наступною математичною моделлю (при припущенні, що величини помилок кутової орієнтації j, y, q та кутових швидкостей ракети j, y, q на момент відключення РУ & & & достатньо малі): Ixwx = (Iy - Iz ) wywz + Mx; & Iywy = (Iz - Ix ) wzw x + My; & Izwz = (I x - Iy ) wxw y + Mz; & & j = wx ; y = wy ; q = wz ; & & де j, y, q j, y, q - кути орієнтації зв'язаних & & & осей РН відносно осей програмної зв'язаної системи координат (помилки кутової орієнтації по крену, рисканню і тангажу) та відповідні кутові швидкості ракети (помилки кутової стабілізації); w x, wy , w z - проекції вектора кутової швидкості РН на осі зв'язаної системи координат; Мx, Му, Мz проекції діючого на РН вектора-момента на осі зв'язаної системи координат, Мj=Mj ( P1,P2 ,P3 ,P4, d1, d2,d3 ,d4 ), j=x, y, z, де d1, d2,d3 ,d4 - кути обертів сопел РУ; P1 ,P2,P 3,P 4, - фактичні (реалізовані у польоті) значення тяг сопел РУ, = Рном +aPном +bPном , і=1,2,3,4; P ном - номінальне Р1 значення тяги кожного сопла; a - випадкова величина, яка розподілена нормально на відрізку [-а; а] 7 83861 і визначає режим роботи РУ (при a=-а - мінімальний, при a=0 -номінальний, при a=+а - максимальний); b 1 - випадкові величини, яки розподілені нормально на відрізку [-b; b] і визначають випадкову величину x різнотяговості сопел (наприклад, якщо b 1=-b; b 2=-b; b 3=+b; b 4=+b, то різнотяговість сопел РУ складає x=2b*100%). З урахуванням цього проведено чисельне моделювання збуреного кутового руху РН на ділянці спаду тяги РУ після її відключення перед відділенням КА для наступних умов і даних: а) режим роботи РУ (мінімальний, номінальний, максимальний) визначався значеннями a=0,15; a=0; a=0,15 згідно діапазону [-а; а] = [-0,15; 0,15]; 8 б) фактична різнотяговість сопел РУ (польотна) приймалась рівного x=6%, що відповідає відрізку [-b; b]=[-0,03; 0,03], задавалась тільки в каналі керування рискання і ураховувалась для обчислення моментів Мx, Му, Мz, діючи х на РН; в) величини DPy, DPq, які необхідні для обчислення компенсаційних сигналів керування U1k,U2k, U3k, U4k, були задані із розрахунку максимальної можливої величини x=10% різнотяговості сопел РУ. Результати моделювання для порівняльних варіантів керування РН з крайових режимів роботи РУ наведені у табл.1, 2. Таблиця 1 Керування РН без компенсаційних сигналів Приріст Кутової швидкості РН, град/с Кута рискання, град Куті в оберту сопел РУ, град Мінімальний 0,03 0,17 0,25 Режим роботи РУ Номінальний 0,06 0,35 0,52 Максимальний 0,11 0,55 0,82 Таблиця 2 Керування РН з компенсаційними сигналами Приріст Кутової швидкості РН, град/с Кута рискання, град Куті в оберту сопел РУ, град Мінімальний 0,02 0,11 0,45 З наведених у табл.1, 2 даних випливає, що використання керування РН з компенсаційними сигналами U1k,U2k, U3k, U4k дає зменшений приріст параметрів стабілізації кутового руху та орієнтації РН і збільшений приріст кутів оберту сопел РУ для різноманітних режимів її роботи у порівнянні з керуванням РН без компенсаційних сигналів. Наведений приклад підтверджує досягнення технічного результату при здійсненні заявленого способу регулювання параметрів кутового руху ракети-носія космічного апарату шляхом формування компенсаційних сигналів U1k,U2k, U3k, U4k та додавання їх з основними сигналами керування Uj, Uy, Uq): - спосіб достатньо легко можливо реалізувати на борту ракети у реальному масштабі часу апаратними та програмними засобами, так як не потребується рішення багатомірних стохастичних та оптимізаційних задач керування, на які витрачається багато часу і ресурсів пам'яті; Режим роботи РУ Номінальний 0,03 0,18 0,60 Максимальний 0,04 0,24 0,85 - спосіб дозволяє не погіршити значно досягнуту на момент відключення рухомої установки точність регулювання параметрів кутового руху ракети при подальшому збуреному русі до моменту відділення КА; - спосіб забезпечує необхідну реакцію сопел РУ та системи керування в цілому на збурення кутового р уху ракети, які обумовлені випадкового різнотяговістю сопел РУ після її відключення перед відділенням КА. Джерела інформації: 1. А.С. СССР №1313214 А1, МКИ 4G05В17/02, 1985р. 2. А.С. СССР №1752095 А1, МКИ 5 G05В19/00, 1988р. 3. Патент РФ №2103715 С1, МКВ 6 G05В11/36, 1998р. 4. Патент РФ №2116663 С1, МКВ 6G05В15/00, 1998р. (прототип) 5. Патент РФ №2129726 С1, МКВ 6 G05В11/54, 1999р. 9 Комп’ютерна в ерстка C.Литв иненко 83861 Підписне 10 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of adjustment of parameters of angular motion of carrier rocket of spacecraft
Автори англійськоюManoilenko Oleksandr Oleksiiovych, Sheptun Yurii Dmytrovych
Назва патенту російськоюСпособ регулирования параметров углового движения ракеты-носителя космического аппарата
Автори російськоюМанойленко Александр Алексеевич, Шептун Юрий Дмитриевич
МПК / Мітки
МПК: G05B 15/00, B64G 1/24
Мітки: параметрів, апарата, руху, регулювання, кутового, космічного, ракети-носія, спосіб
Код посилання
<a href="https://ua.patents.su/5-83861-sposib-regulyuvannya-parametriv-kutovogo-rukhu-raketi-nosiya-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата</a>
Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Бандура Іван Миколайович, Пхайко Ірина Вікторівна, Симонов Володимир Федорович
МПК: B64G 1/24
Мітки: руху, апарата, космічного, стабілізації, система, кутового
Формула / Реферат:
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута...
Спосіб рятування пілотованого космічного корабля з аварійної ракети-носія
Номер патенту: 20362
Опубліковано: 15.01.2007
Автори: Зиков Микола Єфимович, Мокін Олександр Васильович, Шашин Микола Митрофанович, Мокін Андрій Олександрович, Морозов Олег Дмитрович, Кулігін Анатолій Михайлович
МПК: F42B 15/00, B64G 1/00
Мітки: аварійної, пілотованого, рятування, корабля, космічного, спосіб, ракети-носія
Формула / Реферат:
Спосіб рятування пілотованого космічного корабля з аварійної ракети-носія, що включає відділення пілотованого космічного корабля від ракети-носія при працюючій маршовій рушійній установці ракети-носія, яка рухається з кутом атаки, і запускання рушійної установки системи аварійного рятування пілотованого космічного корабля, який відрізняється тим, що перед відділенням пілотованого космічного корабля вимикають маршову рушійну установку...
Спосіб активного відмовостійкого управління орієнтацією космічного апарата
Номер патенту: 11671
Опубліковано: 16.01.2006
Автори: Гавриленко Олег Іванович, Мирна Олена Володимирівна, Пархоменко Юлія Анатоліївна, Лученко Олег Олексійович
МПК: B64G 1/28
Мітки: орієнтацією, відмовостійкого, активного, управління, спосіб, апарата, космічного
Формула / Реферат:
Спосіб активного відмовостійкого управління орієнтацією космічного апарата, що включає вимірювання кутового відхилення орієнтованої осі космічного апарата від потрібного напряму, визначення моментів часу, у які вимірюване кутове відхилення приймає екстремальні значення, змінювання моменту інерції космічного апарата в моменти часу, що відповідають відповідним екстремальним значенням кутового відхилення та значенням кутового відхилення, що...
Спосіб визначення поточних навігаційних параметрів космічного апарата
Номер патенту: 32157
Опубліковано: 12.05.2008
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович
МПК: B64G 1/24
Мітки: космічного, спосіб, навігаційних, апарата, поточних, визначення, параметрів
Формула / Реферат:
Спосіб визначення поточних навігаційних параметрів космічного апарата, який полягає в тому, що за допомогою наземних оптичних вимірювальних систем проводять спостереження та визначення поточних навігаційних параметрів космічного апарата (КА) на тіньовій (неосвітленій) ділянці орбіти за відсутності відображеного від конструкції КА сонячного світла, який відрізняється тим, що для освітлювання використовують штучне джерело випромінювання, яке...
Спосіб розвантаження системи силових гіроскопів космічного апарата
Номер патенту: 62147
Опубліковано: 15.12.2003
Автори: Кузнєцов Юрій Олексійович, Успенський Валерій Борисович, Бандура Іван Миколайович, Голоскоков Євген Григорович
МПК: B64G 1/24
Мітки: спосіб, космічного, розвантаження, системі, гіроскопів, силових, апарата
Формула / Реферат:
Спосіб розвантаження системи силових гіроскопів космічного апарата, який полягає в тому, що вимірюють вектор нагромадженого кінетичного моменту системи силових гіроскопів, вимірюють вектор абсолютної кутової швидкості космічного апарата, визначають сумарний вектор кінетичного моменту космічного апарата, виконують розвантаження за допомогою реактивних двигунів орієнтації, який відрізняється тим, що фіксують момент досягнення допустимого...
Попередній патент: Спосіб селекції сої на стійкість проти білої гнилі
Наступний патент: Похідні тіазолу як модулятори рецепторів канабіноїдів
Випадковий патент: Спосіб вимірювання рівня рідких промислових відходів у поглинальній свердловині