Електромеханічний дезінтегратор
Номер патенту: 57139
Опубліковано: 10.02.2011
Автори: Шиманська Анна Анатоліївна, Шинкаренко Василь Федорович, Лисак Вікторія Володимирівна
Формула / Реферат
1. Електромеханічний дезінтегратор, що містить індукторну систему, яка містить співвісно розташовані верхній і нижній магнітопроводи з трифазними розподіленими обмотками і робочу камеру з дискретними феромагнітними робочими тілами, що розміщена в міжіндукторному проміжку, який відрізняється тим, що трифазна розподілена обмотка виконана спільною для обох магнітопроводів, а її секції виконані Ì-подібної просторової форми з розташуванням лобових частин секцій на зовнішньому діаметрі магнітопроводів, а на їх внутрішньому діаметрі в зоні неробочих ділянок Ì-подібних секцій в межах кожного полюсного поділу τ секції двох крайніх фаз укладено з перехрестом, при цьому робоча камера виконана роз'ємною.
2. Електромеханічний дезінтегратор за п. 1, який відрізняється тим, що активну довжину обмотки визначають за співвідношенням 2·k·m·τ, де m - число фаз; τ - довжина полюсного поділу; k = 2, 4, ..., а порядок чергування фаз обмотки в межах кожного наступного подвійного полюсного поділу за напрямом розповсюдження хвилі електромагнітного поля визначають послідовним зсувом попередньої фазної групи обмотки на кут α=π/3, а саме:
A-z-B-x-C-y→z-B-x-C-y-A→B-x-C-y-A-z→…
Текст
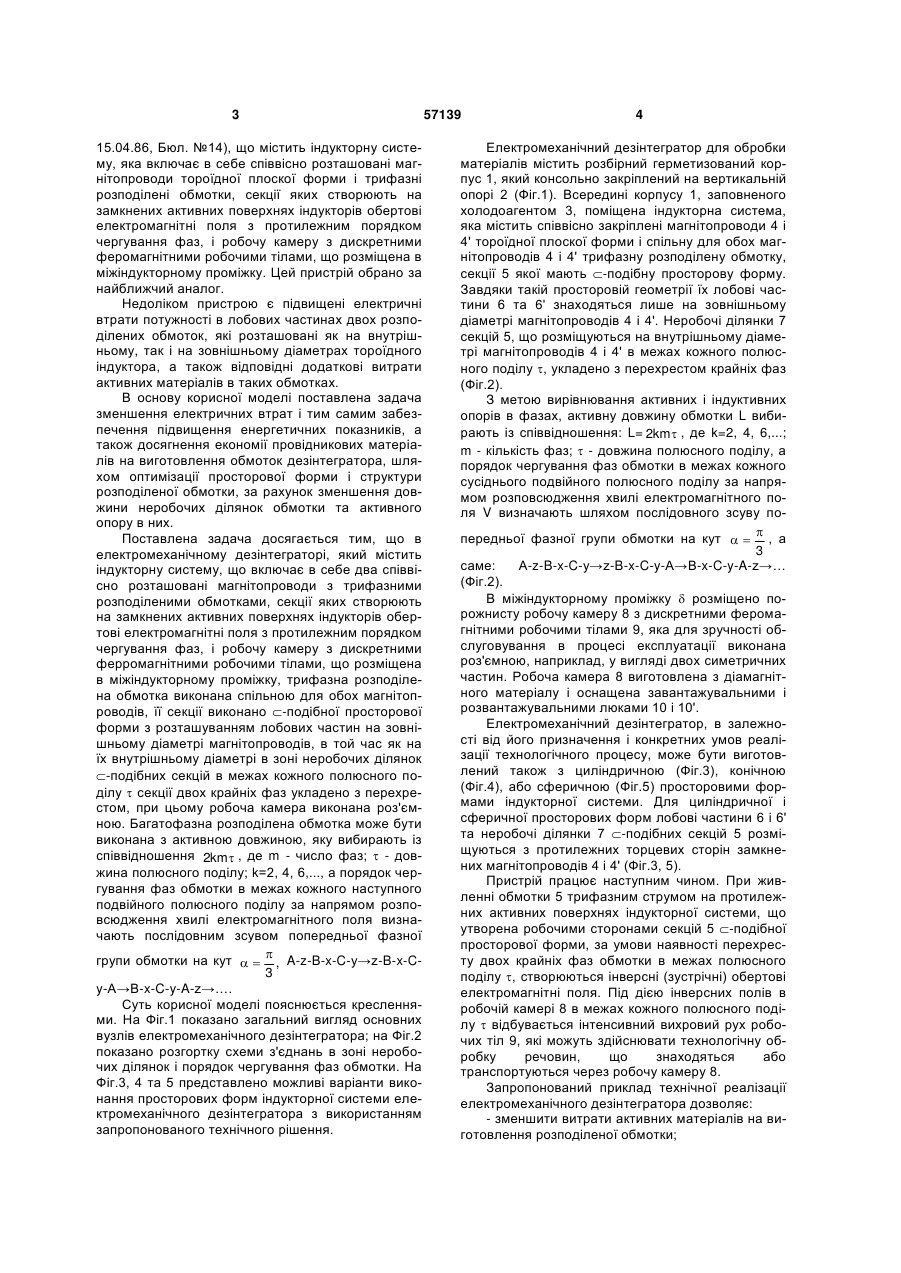
1. Електромеханічний дезінтегратор, що містить індукторну систему, яка містить співвісно розташовані верхній і нижній магнітопроводи з трифазними розподіленими обмотками і робочу камеру з дискретними феромагнітними робочими тілами, що розміщена в міжіндукторному проміжку, який відрізняється тим, що трифазна розподілена обмотка виконана спільною для обох магнітопроводів, а її секції виконані -подібної просторової форми з розташуванням лобових частин секцій на 3 15.04.86, Бюл. №14), що містить індукторну систему, яка включає в себе співвісно розташовані магнітопроводи тороїдної плоскої форми і трифазні розподілені обмотки, секції яких створюють на замкнених активних поверхнях індукторів обертові електромагнітні поля з протилежним порядком чергування фаз, і робочу камеру з дискретними феромагнітними робочими тілами, що розміщена в міжіндукторному проміжку. Цей пристрій обрано за найближчий аналог. Недоліком пристрою є підвищені електричні втрати потужності в лобових частинах двох розподілених обмоток, які розташовані як на внутрішньому, так і на зовнішньому діаметрах тороїдного індуктора, а також відповідні додаткові витрати активних матеріалів в таких обмотках. В основу корисної моделі поставлена задача зменшення електричних втрат і тим самим забезпечення підвищення енергетичних показників, а також досягнення економії провідникових матеріалів на виготовлення обмоток дезінтегратора, шляхом оптимізації просторової форми і структури розподіленої обмотки, за рахунок зменшення довжини неробочих ділянок обмотки та активного опору в них. Поставлена задача досягається тим, що в електромеханічному дезінтеграторі, який містить індукторну систему, що включає в себе два співвісно розташовані магнітопроводи з трифазними розподіленими обмотками, секції яких створюють на замкнених активних поверхнях індукторів обертові електромагнітні поля з протилежним порядком чергування фаз, і робочу камеру з дискретними ферромагнітними робочими тілами, що розміщена в міжіндукторному проміжку, трифазна розподілена обмотка виконана спільною для обох магнітопроводів, її секції виконано -подібної просторової форми з розташуванням лобових частин на зовнішньому діаметрі магнітопроводів, в той час як на їх внутрішньому діаметрі в зоні неробочих ділянок -подібних секцій в межах кожного полюсного поділу секції двох крайніх фаз укладено з перехрестом, при цьому робоча камера виконана роз'ємною. Багатофазна розподілена обмотка може бути виконана з активною довжиною, яку вибирають із співвідношення 2km , де m - число фаз; - довжина полюсного поділу; k=2, 4, 6,..., а порядок чергування фаз обмотки в межах кожного наступного подвійного полюсного поділу за напрямом розповсюдження хвилі електромагнітного поля визначають послідовним зсувом попередньої фазної групи обмотки на кут , A-z-B-x-C-y→z-B-x-C3 y-A→B-x-C-y-A-z→…. Суть корисної моделі пояснюється кресленнями. На Фіг.1 показано загальний вигляд основних вузлів електромеханічного дезінтегратора; на Фіг.2 показано розгортку схеми з'єднань в зоні неробочих ділянок і порядок чергування фаз обмотки. На Фіг.3, 4 та 5 представлено можливі варіанти виконання просторових форм індукторної системи електромеханічного дезінтегратора з використанням запропонованого технічного рішення. 57139 4 Електромеханічний дезінтегратор для обробки матеріалів містить розбірний герметизований корпус 1, який консольно закріплений на вертикальній опорі 2 (Фіг.1). Всередині корпусу 1, заповненого холодоагентом 3, поміщена індукторна система, яка містить співвісно закріплені магнітопроводи 4 і 4' тороїдної плоскої форми і спільну для обох магнітопроводів 4 і 4' трифазну розподілену обмотку, секції 5 якої мають -подібну просторову форму. Завдяки такій просторовій геометрії їх лобові частини 6 та 6' знаходяться лише на зовнішньому діаметрі магнітопроводів 4 і 4'. Неробочі ділянки 7 секцій 5, що розміщуються на внутрішньому діаметрі магнітопроводів 4 і 4' в межах кожного полюсного поділу , укладено з перехрестом крайніх фаз (Фіг.2). З метою вирівнювання активних і індуктивних опорів в фазах, активну довжину обмотки L вибирають із співвідношення: L= 2km , де k=2, 4, 6,...; m - кількість фаз; - довжина полюсного поділу, а порядок чергування фаз обмотки в межах кожного сусіднього подвійного полюсного поділу за напрямом розповсюдження хвилі електромагнітного поля V визначають шляхом послідовного зсуву попередньої фазної групи обмотки на кут , а 3 саме: A-z-B-x-C-y→z-B-x-C-y-A→B-x-C-y-A-z→… (Фіг.2). Вміжіндукторному проміжку розміщено порожнисту робочу камеру 8 з дискретними феромагнітними робочими тілами 9, яка для зручності обслуговування в процесі експлуатації виконана роз'ємною, наприклад, у вигляді двох симетричних частин. Робоча камера 8 виготовлена з діамагнітного матеріалу і оснащена завантажувальними і розвантажувальними люками 10 і 10'. Електромеханічний дезінтегратор, в залежності від його призначення і конкретних умов реалізації технологічного процесу, може бути виготовлений також з циліндричною (Фіг.3), конічною (Фіг.4), або сферичною (Фіг.5) просторовими формами індукторної системи. Для циліндричної і сферичної просторових форм лобові частини 6 і 6' та неробочі ділянки 7 -подібних секцій 5 розміщуються з протилежних торцевих сторін замкнених магнітопроводів 4 і 4' (Фіг.3, 5). Пристрій працює наступним чином. При живленні обмотки 5 трифазним струмом на протилежних активних поверхнях індукторної системи, що утворена робочими сторонами секцій 5 -подібної просторової форми, за умови наявності перехресту двох крайніх фаз обмотки в межах полюсного поділу , створюються інверсні (зустрічні) обертові електромагнітні поля. Під дією інверсних полів в робочій камері 8 в межах кожного полюсного поділу відбувається інтенсивний вихровий рух робочих тіл 9, які можуть здійснювати технологічну обробку речовин, що знаходяться або транспортуються через робочу камеру 8. Запропонований приклад технічної реалізації електромеханічного дезінтегратора дозволяє: - зменшити витрати активних матеріалів на виготовлення розподіленої обмотки; 5 57139 - зменшити основні електричні втрати в обмотці. Очікуваний ефект підтверджується також порівняльним розрахунковим аналізом витрат провідникових матеріалів в зоні неробочих ділянок обмоток. За умови забезпечення оптимального співвідношення величини міжіндукторного проміжку і полюсного поділу , яке для пристроїв даного типу становить /=0,67 (див. Шинкаренко В.Ф., Безсонов С.А. Еволюційний синтез нових видів електромеханічних перетворювачів енергії технологічного призначення з використанням моделей макроеволюції // Вісник Національного технічного університету «ХПІ». Тематичний випуск №16. 2001. - С. 171-173), довжина неробочих частин обмотки (на пару полюсів) найближчого аналогу становить LK=4mLЛ4×3*2,226,4, де LЛ2,2 Комп’ютерна верстка А. Рябко 6 довжина однієї лобової частини секції. В обмотці запропонованого типу (з -подібними секціями) LK=2mNЛ+2(LA+LB+LC)12+2(1,4+0,8+1,8)19,6, де LA1,4; LC1,8 - довжини неробочих ділянок крайніх фаз, за умови трирівневого перетину сторін секцій в зоні перехресту; LB0,8т - довжина неробочої ділянки середньої фази. Як видно з порівняльного аналізу, економія активних матеріалів при використанні запропонованої обмотки становить 25,7%. Пропорційно зменшуються і електричні втрати в обмотці. Слід зазначити, що із збільшенням величини , що характерно для дезінтеграторів великої продуктивності, відносні витрати активних матеріалів в запропонованому варіанті електромеханічного дезінтегратора будуть зменшуватися. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюElectromechanical desintegrator
Автори англійськоюShynkarenko Vasyl Fedorovych, Shymanska Anna Anatoliivna, Lysak Viktoriia Volodymyrivna
Назва патенту російськоюЭлектромеханический дезинтегратор
Автори російськоюШинкаренко Василий Федорович, Шиманская Анна Анатольевна, Лысак Виктория Владимировна
МПК / Мітки
МПК: B01F 13/08, H02K 41/025
Мітки: дезінтегратор, електромеханічний
Код посилання
<a href="https://ua.patents.su/3-57139-elektromekhanichnijj-dezintegrator.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний дезінтегратор</a>
Електромеханічний дезінтегратор
Номер патенту: 43635
Опубліковано: 25.08.2009
Автори: Августинович Анна Анатоліївна, Шинкаренко Василь Федорович, Вахновецька Марія Олександрівна, Лисак Вікторія Володимирівна
МПК: B01F 13/00, H02K 41/025
Мітки: дезінтегратор, електромеханічний
Формула / Реферат:
Електромеханічний дезінтегратор, що містить індуктор у вигляді магнітної системи з багатофазною обмоткою, робочу камеру з дискретними феромагнітними робочими тілами, яка розміщена в міжіндукторному проміжку, який відрізняється тим, що магнітна система індуктора виконана у вигляді плоскої двосторонньої поверхні з боковими замикаючими ділянками дугової форми, при цьому довжина плоскої ділянки двосторонньої активної зони індуктора становить...
Електромеханічний пристрій для обробки матеріалів
Номер патенту: 43940
Опубліковано: 10.09.2009
Автори: Лисак Вікторія Володимирівна, Шиманська Анна Анатоліївна, Шинкаренко Василь Федорович, Вахновецька Марія Олександрівна
МПК: H02K 41/025, B01F 13/00
Мітки: пристрій, електромеханічний, матеріалів, обробки
Формула / Реферат:
Електромеханічний пристрій для обробки матеріалів, що містить плоскі паралельно розташовані магнітопроводи з трифазними розподіленими кільцевими обмотками, які укладені таким чином, що створюють зустрічні біжучі електромагнітні поля, і робочі камери, розташовані в міжіндукторних проміжках, який відрізняється тим, що активні сторони кожної кільцевої обмотки укладено в суміжні магнітопроводи, а робочі камери встановлено всередині активних зон...
Трифазна двошарова обмотка статорів електричних машин змінного струму
Номер патенту: 35957
Опубліковано: 10.10.2008
Автори: Єрошин Сергій Сергійович, Невзлін Борис Ісакович, Кривошеєв Євген Ігорович
МПК: H02K 3/12
Мітки: трифазна, машин, двошарова, змінного, статорів, струму, електричних, обмотка
Формула / Реферат:
Трифазна двошарова обмотка статорів електричних машин змінного струму, що складається із секцій, а статор має число пазів, кратне дванадцяти, яка відрізняється тим, що сім дванадцятих загальної кількості секцій обмотки укорочено на одну шосту полюсного розподілу та п'ять дванадцятих загальної кількості секцій обмотки подовжено на одну шосту полюсного розподілу.
Електромеханічний водонагрівач з дисковими магнітопроводами
Номер патенту: 50044
Опубліковано: 25.05.2010
Автори: Жарков Віктор Якович, Атрошенко Олександр Сергійович, Юдовінский Валерій Борісович
МПК: F03D 7/06
Мітки: магнітопроводами, водонагрівач, дисковими, електромеханічний
Формула / Реферат:
Електромеханічний водонагрівач з дисковими магнітопроводами, що містить нерухомі, співвісно розташовані дискові магнітопроводи з зубчастою будовою прилеглих дзеркально розташованих торцевих поверхонь, індукційні обмотки в кільцевій канавці зубчастого торця кожного магнітопроводу, збуджені постійним струмом в одному напрямі, і дисковий ротор, розташований співвісно в зазорі між зубчастими торцями нерухомих дискових магнітопроводів в...
Електромеханічний ударний пристрій індукційного типу
Номер патенту: 52270
Опубліковано: 25.08.2010
Автори: Болюх Володимир Федорович, Рассоха Максим Олексійович
МПК: H02K 33/00, B06B 1/02
Мітки: індукційного, ударний, типу, пристрій, електромеханічний
Формула / Реферат:
1. Електромеханічний ударний пристрій індукційного типу, що містить дві коаксіально розташовані і аксіально зміщені між собою секції обмотки індуктора з внутрішніми отворами, одна з яких, що прилягає до діелектричного корпусу, виконана у вигляді плоскої котушки, секції обмотки індуктора за допомогою електронного ключа під'єднані до ємнісного накопичувача та шунтовані зворотним діодом, розташований між індуктором і об'єктом удару та виконаний...
Попередній патент: Спосіб двопрохідного зубофрезерування
Наступний патент: Універсальний багатофункціональний апарат ультразвукової терапії
Випадковий патент: Прес для пресування порошків