Пасивна система стабілізації руху кінцевого тіла обертової космічної тросової системи
Номер патенту: 58986
Опубліковано: 26.04.2011
Автори: Пироженко Олександр Володимирович, Авдєєв Анатолій Миколайович, Волошенюк Оксана Леонідівна
Формула / Реферат
1. Пасивна система стабілізації руху кінцевого тіла обертової космічної тросової системи, що включає нитку і приставку, шарнірно з'єднану з кінцевим тілом, яка відрізняється тим, що між ниткою і приставкою встановлені додаткові пристрої демпфірування коливань, а саме шарнір кручення і подовжній демпфер.
2. Пасивна система стабілізації руху кінцевого тіла обертової космічної тросової системи за п. 1, яка відрізняється тим, що на приставці додатково встановлені три пружини для збільшення швидкості гасіння кутових коливань кінцевого тіла відносно власного центра мас.
Текст
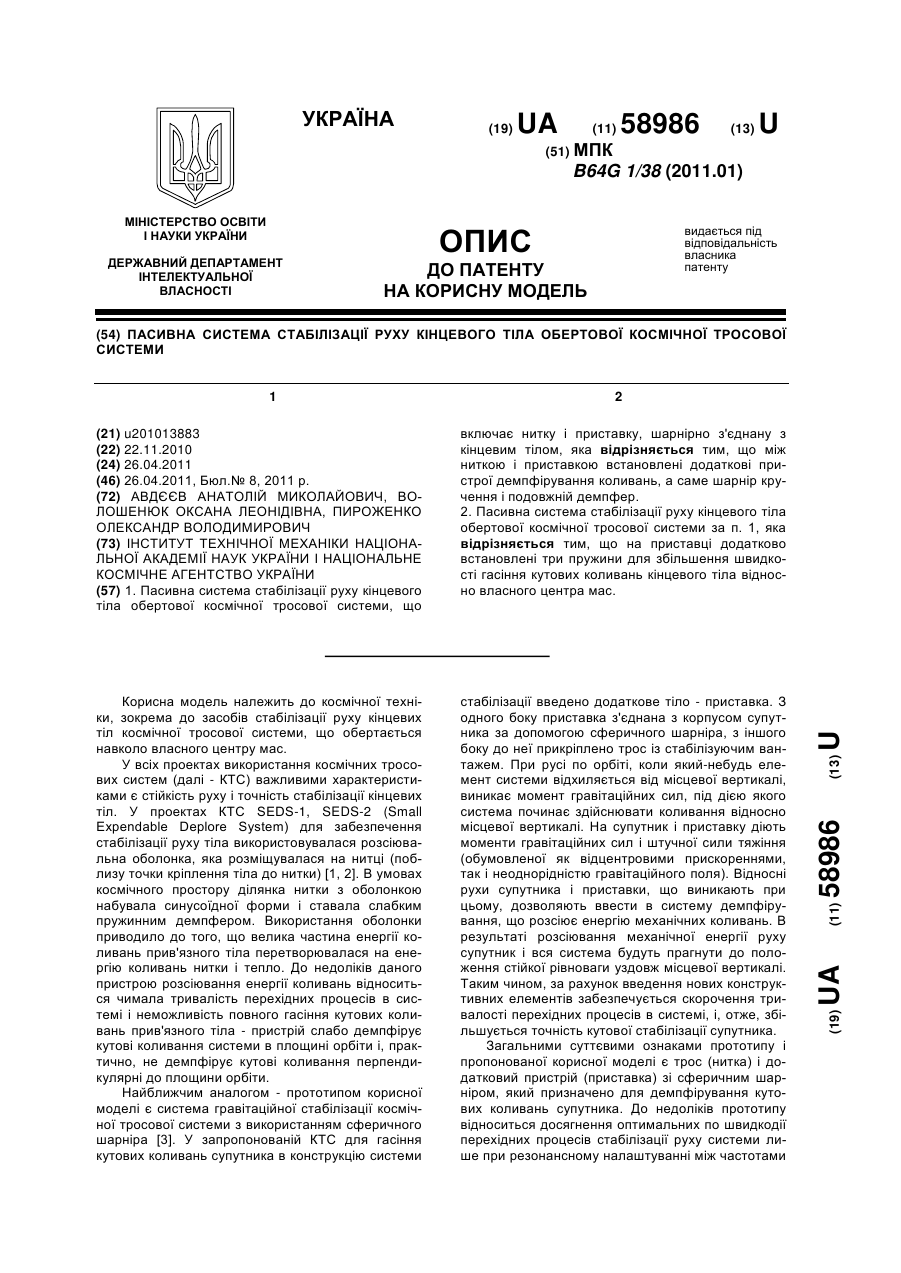
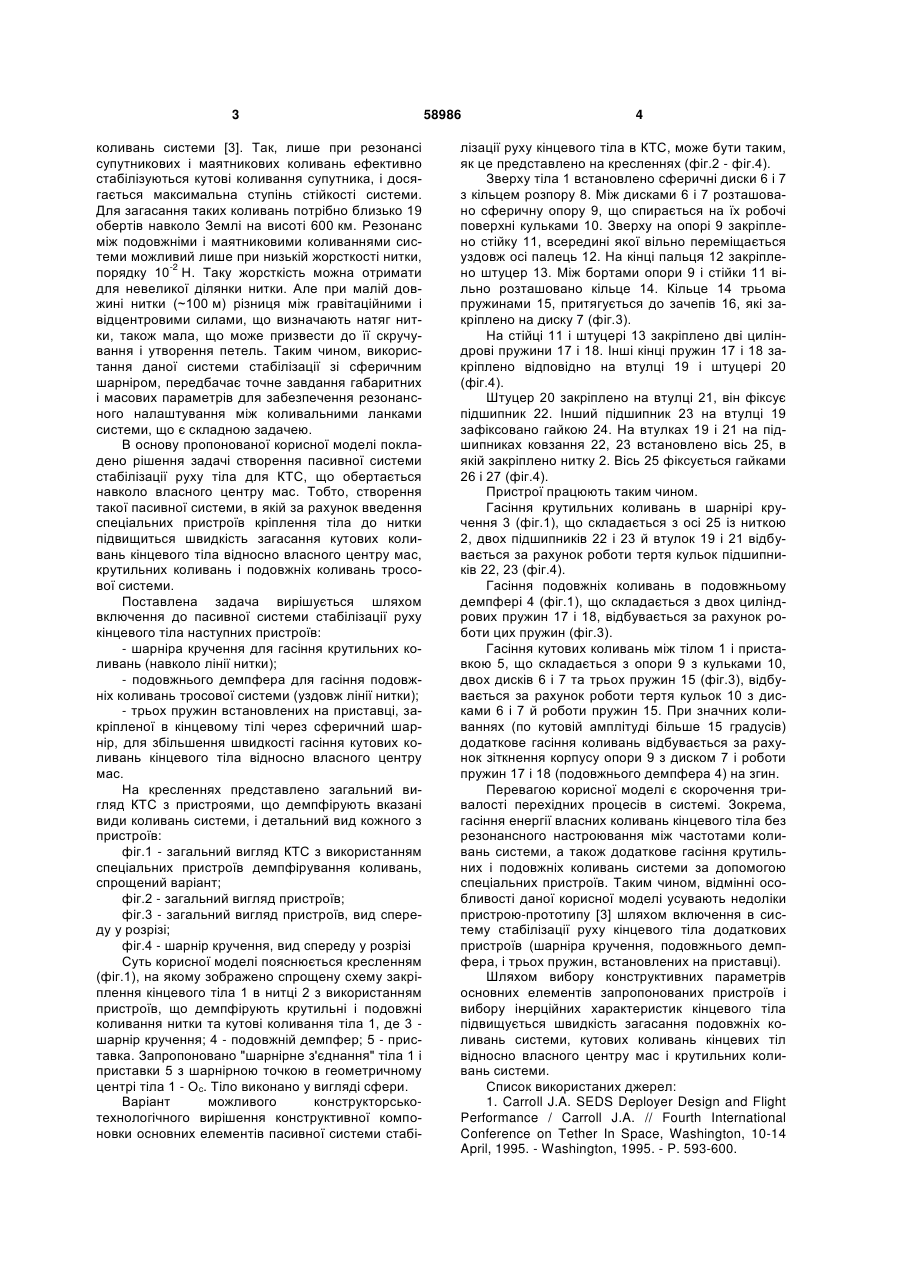
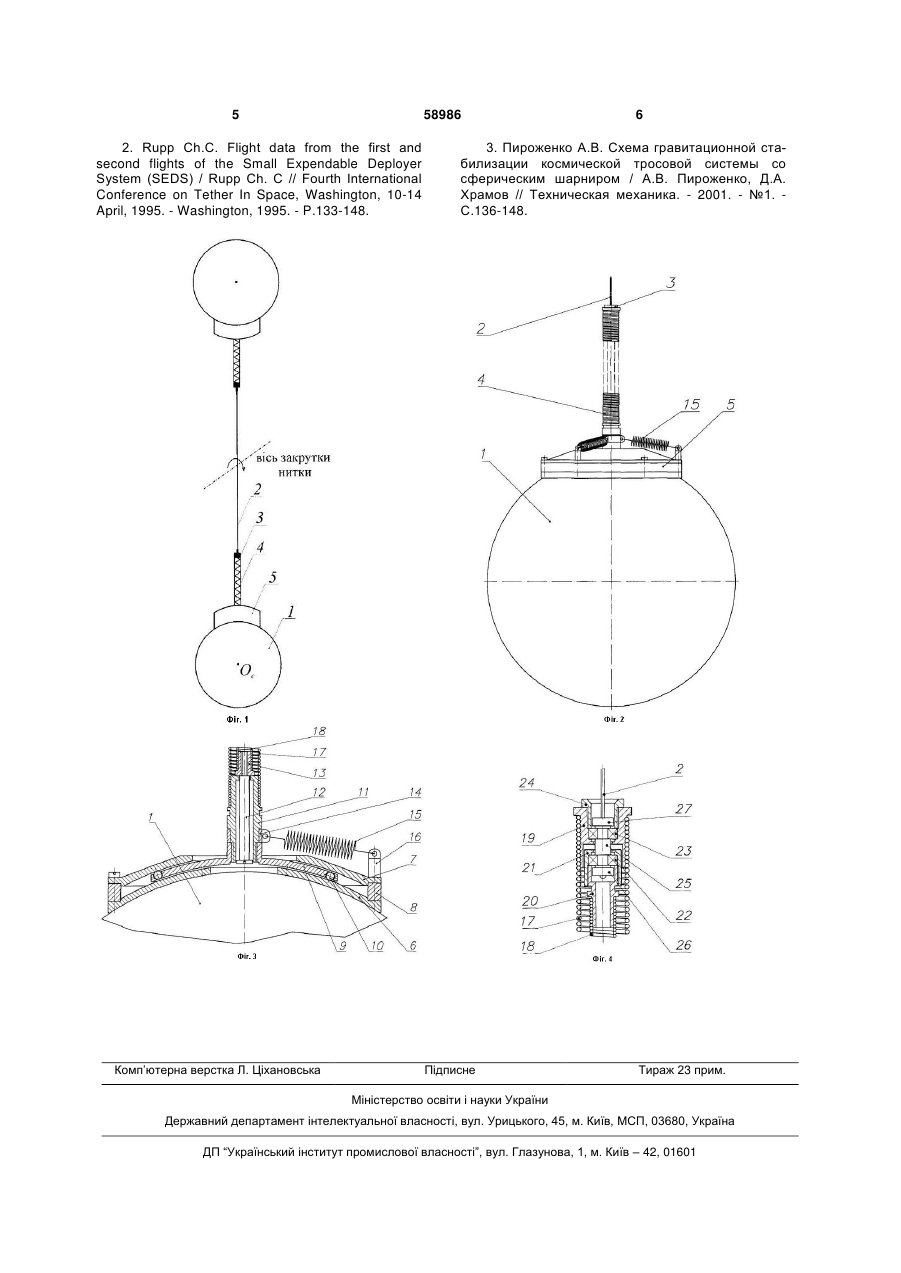
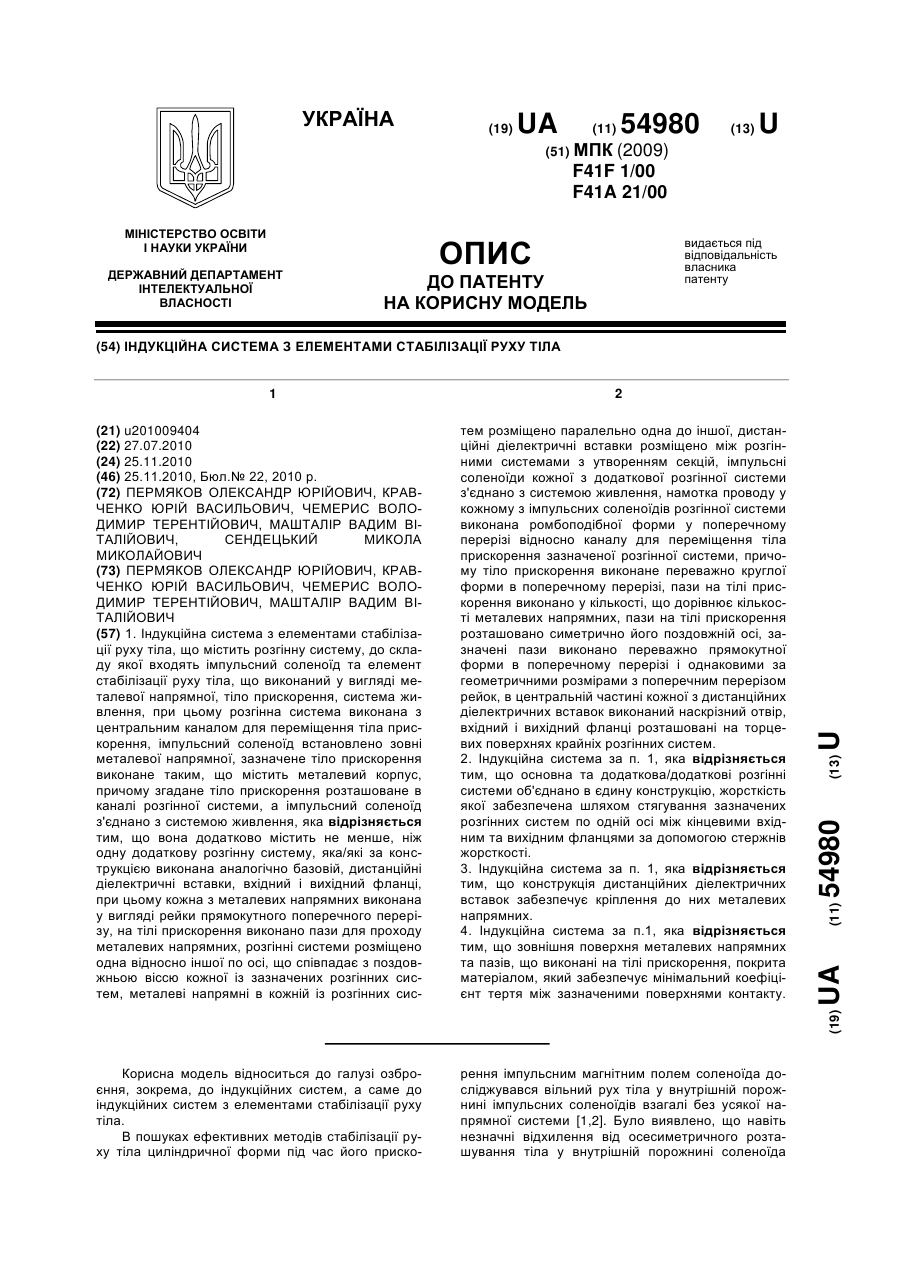
1. Пасивна система стабілізації руху кінцевого тіла обертової космічної тросової системи, що 3 коливань системи [3]. Так, лише при резонансі супутникових і маятникових коливань ефективно стабілізуються кутові коливання супутника, і досягається максимальна ступінь стійкості системи. Для загасання таких коливань потрібно близько 19 обертів навколо Землі на висоті 600 км. Резонанс між подовжніми і маятниковими коливаннями системи можливий лише при низькій жорсткості нитки, порядку 10-2 Н. Таку жорсткість можна отримати для невеликої ділянки нитки. Але при малій довжині нитки (~100 м) різниця між гравітаційними і відцентровими силами, що визначають натяг нитки, також мала, що може призвести до її скручування і утворення петель. Таким чином, використання даної системи стабілізації зі сферичним шарніром, передбачає точне завдання габаритних і масових параметрів для забезпечення резонансного налаштування між коливальними ланками системи, що є складною задачею. В основу пропонованої корисної моделі покладено рішення задачі створення пасивної системи стабілізації руху тіла для КТС, що обертається навколо власного центру мас. Тобто, створення такої пасивної системи, в якій за рахунок введення спеціальних пристроїв кріплення тіла до нитки підвищиться швидкість загасання кутових коливань кінцевого тіла відносно власного центру мас, крутильних коливань і подовжніх коливань тросової системи. Поставлена задача вирішується шляхом включення до пасивної системи стабілізації руху кінцевого тіла наступних пристроїв: - шарніра кручення для гасіння крутильних коливань (навколо лінії нитки); - подовжнього демпфера для гасіння подовжніх коливань тросової системи (уздовж лінії нитки); - трьох пружин встановлених на приставці, закріпленої в кінцевому тілі через сферичний шарнір, для збільшення швидкості гасіння кутових коливань кінцевого тіла відносно власного центру мас. На кресленнях представлено загальний вигляд КТС з пристроями, що демпфірують вказані види коливань системи, і детальний вид кожного з пристроїв: фіг.1 - загальний вигляд КТС з використанням спеціальних пристроїв демпфірування коливань, спрощений варіант; фіг.2 - загальний вигляд пристроїв; фіг.3 - загальний вигляд пристроїв, вид спереду у розрізі; фіг.4 - шарнір кручення, вид спереду у розрізі Суть корисної моделі пояснюється кресленням (фіг.1), на якому зображено спрощену схему закріплення кінцевого тіла 1 в нитці 2 з використанням пристроїв, що демпфірують крутильні і подовжні коливання нитки та кутові коливання тіла 1, де 3 шарнір кручення; 4 - подовжній демпфер; 5 - приставка. Запропоновано "шарнірне з'єднання" тіла 1 і приставки 5 з шарнірною точкою в геометричному центрі тіла 1 - Ос. Тіло виконано у вигляді сфери. Варіант можливого конструкторськотехнологічного вирішення конструктивної компоновки основних елементів пасивної системи стабі 58986 4 лізації руху кінцевого тіла в КТС, може бути таким, як це представлено на кресленнях (фіг.2 - фіг.4). Зверху тіла 1 встановлено сферичні диски 6 і 7 з кільцем розпору 8. Між дисками 6 і 7 розташовано сферичну опору 9, що спирається на їх робочі поверхні кульками 10. Зверху на опорі 9 закріплено стійку 11, всередині якої вільно переміщається уздовж осі палець 12. На кінці пальця 12 закріплено штуцер 13. Між бортами опори 9 і стійки 11 вільно розташовано кільце 14. Кільце 14 трьома пружинами 15, притягується до зачепів 16, які закріплено на диску 7 (фіг.3). На стійці 11 і штуцері 13 закріплено дві циліндрові пружини 17 і 18. Інші кінці пружин 17 і 18 закріплено відповідно на втулці 19 і штуцері 20 (фіг.4). Штуцер 20 закріплено на втулці 21, він фіксує підшипник 22. Інший підшипник 23 на втулці 19 зафіксовано гайкою 24. На втулках 19 і 21 на підшипниках ковзання 22, 23 встановлено вісь 25, в якій закріплено нитку 2. Вісь 25 фіксується гайками 26 і 27 (фіг.4). Пристрої працюють таким чином. Гасіння крутильних коливань в шарнірі кручення 3 (фіг.1), що складається з осі 25 із ниткою 2, двох підшипників 22 і 23 й втулок 19 і 21 відбувається за рахунок роботи тертя кульок підшипників 22, 23 (фіг.4). Гасіння подовжніх коливань в подовжньому демпфері 4 (фіг.1), що складається з двох циліндрових пружин 17 і 18, відбувається за рахунок роботи цих пружин (фіг.3). Гасіння кутових коливань між тілом 1 і приставкою 5, що складається з опори 9 з кульками 10, двох дисків 6 і 7 та трьох пружин 15 (фіг.3), відбувається за рахунок роботи тертя кульок 10 з дисками 6 і 7 й роботи пружин 15. При значних коливаннях (по кутовій амплітуді більше 15 градусів) додаткове гасіння коливань відбувається за рахунок зіткнення корпусу опори 9 з диском 7 і роботи пружин 17 і 18 (подовжнього демпфера 4) на згин. Перевагою корисної моделі є скорочення тривалості перехідних процесів в системі. Зокрема, гасіння енергії власних коливань кінцевого тіла без резонансного настроювання між частотами коливань системи, а також додаткове гасіння крутильних і подовжніх коливань системи за допомогою спеціальних пристроїв. Таким чином, відмінні особливості даної корисної моделі усувають недоліки пристрою-прототипу [3] шляхом включення в систему стабілізації руху кінцевого тіла додаткових пристроїв (шарніра кручення, подовжнього демпфера, і трьох пружин, встановлених на приставці). Шляхом вибору конструктивних параметрів основних елементів запропонованих пристроїв і вибору інерційних характеристик кінцевого тіла підвищується швидкість загасання подовжніх коливань системи, кутових коливань кінцевих тіл відносно власного центру мас і крутильних коливань системи. Список використаних джерел: 1. Carroll J.A. SEDS Deployer Design and Flight Performance / Carroll J.A. // Fourth International Conference on Tether In Space, Washington, 10-14 April, 1995. - Washington, 1995. - P. 593-600. 5 58986 2. Rupp Ch.С. Flight data from the first and second flights of the Small Expendable Deployer System (SEDS) / Rupp Ch. С // Fourth International Conference on Tether In Space, Washington, 10-14 April, 1995. - Washington, 1995. - P.133-148. Комп’ютерна верстка Л. Ціхановська 6 3. Пироженко А.В. Схема гравитационной стабилизации космической тросовой системы со сферическим шарниром / А.В. Пироженко, Д.А. Храмов // Техническая механика. - 2001. - №1. С.136-148. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPassive stabilization system of motion of end body of rotating space cable system
Автори англійськоюAvdieev Anatolii Mykolaiovych, Volosheniuk Oksana Leonidivna, Pyrozhenko Oleksandr Volodymyrovych
Назва патенту російськоюПассивная система стабилизации движения конечного тела вращающейся космической тросовой системы
Автори російськоюАвдеев Анатолий Николаевич, Волошенюк Оксана Леонидовна, Пироженко Александр Владимирович
МПК / Мітки
МПК: B64G 1/38
Мітки: руху, системі, кінцевого, тросової, стабілізації, тіла, система, космічної, пасивна, обертової
Код посилання
<a href="https://ua.patents.su/3-58986-pasivna-sistema-stabilizaci-rukhu-kincevogo-tila-obertovo-kosmichno-trosovo-sistemi.html" target="_blank" rel="follow" title="База патентів України">Пасивна система стабілізації руху кінцевого тіла обертової космічної тросової системи</a>
Індукційна система з елементами стабілізації руху тіла
Номер патенту: 54980
Опубліковано: 25.11.2010
Автори: Чемерис Володимир Терентійович, Сендецький Микола Миколайович, Кравченко Юрій Васильович, Пермяков Олександр Юрійович, Машталір Вадим Віталійович
МПК: F41F 1/00, F41A 21/00
Мітки: індукційна, тіла, елементами, система, руху, стабілізації
Формула / Реферат:
1. Індукційна система з елементами стабілізації руху тіла, що містить розгінну систему, до складу якої входять імпульсний соленоїд та елемент стабілізації руху тіла, що виконаний у вигляді металевої напрямної, тіло прискорення, система живлення, при цьому розгінна система виконана з центральним каналом для переміщення тіла прискорення, імпульсний соленоїд встановлено зовні металевої напрямної, зазначене тіло прискорення виконане таким, що...
Спосіб відділення від носія з одночасним забезпеченням тросової системи гравітаційної орієнтації по місцевій вертикалі та стабілізації кутового положення на орбіті супутника, що трансформується для багаторазово
Номер патенту: 34218
Опубліковано: 11.08.2008
Автори: Левенко Олександр Сергійович, Кукушкін Володимир Іванович
МПК: B64G 1/10, B64C 17/00
Мітки: супутника, стабілізації, системі, носія, кутового, спосіб, вертикалі, орбіти, багаторазової, місцевий, одночасним, забезпеченням, відділення, тросової, положення, трансформується, гравітаційної, орієнтації
Формула / Реферат:
Спосіб відділення від носія з одночасним забезпеченням тросової системи гравітації орієнтації по місцевій вертикалі та стабілізації кутового положення на орбіті супутника, що трансформується для багаторазового використання, який відрізняється тим, що використанням ракетного двигуна як вантажу тросової системи гравітаційної орієнтації та стабілізації здійснюється самостійне відділення і віддалення супутника від носія без зміни стійкого...
Спосіб стабілізації руху тіла при індукційному прискоренні
Номер патенту: 36202
Опубліковано: 10.10.2008
Автори: Машталір Вадим Віталійович, Чемерис Володимир Терентійович
МПК: F41F 1/00, F41A 21/00
Мітки: спосіб, прискоренні, індукційному, руху, тіла, стабілізації
Формула / Реферат:
1. Спосіб стабілізації руху тіла при індукційному прискоренні, при якому попередньо формують розгінну систему, що містить імпульсні соленоїди, зовнішні стержні жорсткості та внутрішні напрямні елементи, розміщують внутрішні напрямні елементи в отворах соленоїдів, підготовляють тіло прискорення, яке містить металевий корпус, здійснюють заходи щодо проведення пострілу шляхом подачі імпульсних струмів від системи живлення на соленоїди та...
Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Пхайко Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64G 1/24
Мітки: апарата, космічного, система, руху, стабілізації, кутового
Формула / Реферат:
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута...
Система управління електродвигуном для приводу тросового барабана шахтної підіймальної машини і тросової системи
Номер патенту: 26520
Опубліковано: 11.10.1999
Автори: Грінуей Малколм Ернест, Шмітт Вінфрід Е.
МПК: B66B 1/00
Мітки: електродвигуном, тросового, управління, приводу, система, машини, системі, тросової, шахтної, барабана, підіймальної
Формула / Реферат:
1. Система управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы, включающей в себя транспортное средство, поддерживаемое тросом, и образующей колебательную систему, содержащая датчик нагрузки, предназначенный для постоянного контролирования нагрузки на трос и для посылки соответствующего сигнала нагрузки, датчик длины троса, постоянно контролирующий длину троса, сматываемого с тросового...
Попередній патент: Спосіб спектрофотометричного визначення вмісту ацетону у воді
Наступний патент: Пристрій для погашення ураганів
Випадковий патент: Спосіб гінгівопластики післяекстракційної заглибини