Система управління електродвигуном для приводу тросового барабана шахтної підіймальної машини і тросової системи
Формула / Реферат
1. Система управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы, включающей в себя транспортное средство, поддерживаемое тросом, и образующей колебательную систему, содержащая датчик нагрузки, предназначенный для постоянного контролирования нагрузки на трос и для посылки соответствующего сигнала нагрузки, датчик длины троса, постоянно контролирующий длину троса, сматываемого с тросового барабана, и выдающий соответствующий сигнал относительно длины троса, датчик скорости для измерения скорости вращения двигателя и для посылки соответствующего сигнала относительно скорости вращения двигателя, датчик силы тока для измерения силы тока, забираемого двигателем, и для посылки соответствующего сигнала относительно силы тока двигателя, блок управления двигателем с вводами для сигнала нагрузки, сигнала длины троса, сигнала скорости вращения двигателя и сигнала силы тока двигателя для генерирования сигнала управления двигателем и блок привода двигателя, чутко реагирующий на сигнал управления двигателем для изменения силы тока, подаваемого на двигатель, отличающаяся тем, что блок управления двигателем выполнен в виде арифметического устройства для вычисления установочных величин для скорости, ускорения и резкого движения колебательной системы, и средства обработки для вычисления периодов собственных мод колебания колебательной системы или ее части на основе сигнала длины троса и сигнала нагрузки троса, для сравнения установочных величин с входными сигналами и для генерирования сигнала управления двигателем с компонентом, который связан с характеристиками собственного колебания колебательной системы или ее части, чтобы предотвратить возбуждение колебаний в системе.
2. Система управления по п.1, отличающаяся тем, что колебательная система включает транспортное средство, трос, шкив, канатный барабан и электродвигатель.
3. Система управления по п.2, отличающаяся тем, что колебательная система включает пару транспортных средств с соответствующими тросами, шкивами и канатными барабанами.
4. Система управления по пп.1 - 3, отличающаяся тем, что характеристика собственного колебания колебательной системы или ее части является основной частотой колебания этой системы.
5. Система управления по пп.1 - 4, отличающаяся тем, что блок управления двигателем выполнен с возможностью подачи дополнительной установочной величины скорости, сравниваемой с установочной величиной скорости в течение периодов резкого движения.
6. Система управления по п.5, отличающаяся тем, что средство обработки блока управления двигателем выполнено с возможностью определения дополнительной установочной величины скорости, представленной установочной величиной резкого движения, деленной на квадрат угловой частоты собственной моды колебания колебательной системы или ее части.
7. Система управления по пп.1 - 5, отличающаяся тем, что блок управления двигателем выполнен с возможностью реагирования на датчики длины троса и датчики нагрузки для расчета периодов собственных мод колебаний колебательной системы или ее части на основе длины троса и величины нагрузок, испытываемых транспортными средствами для вычисления их установочных величин.
8. Система управления по п.1, отличающаяся тем, что арифметическое устройство блока управления двигателем выполнено с возможностью вычисления установочных величин с учетом моментов инерции тросовых барабанов и двигателя.
9. Система управления по пп.1, 7 и 8, отличающаяся тем, что каждый датчик длины троса выполнен с вращающимся шифратором, связанным с каждым тросовым барабаном.
10. Система управления по пп.1, 7 и 8, отличающаяся тем, что каждый датчик длины троса выполнен с преобразователем абсолютной позиции, связанным с электродвигателем.
11. Система управления по пп.1, 7 - 10, отличающаяся тем, что один или оба датчика длины троса выполнены с возможностью считывания как смещения, так и направления смещения троса, с которым он или они связаны.
12. Система управления по п.1, 7 - 11, отличающаяся тем, что один или оба датчика нагрузки выполнены с возможностью измерения нагрузки на шкиве, придерживающем трос и с которым связан датчик нагрузки.
13. Система управления по любому одному из пп.1 - 12, отличающаяся тем, что арифметическое устройство блока управления двигателем выполнено с возможностью вычисления массы одного или обоих тросов на основе выходного сигнала соответствующего датчика длины троса и массы на единицу длины троса.
14. Система управления по пп.1 - 13, отличающаяся тем, что она снабжена блоком управления тормозом, который соединен блоком управления двигателем с помощью коммуникационной связи, через которую угловые частоты мод собственных колебаний колебательной системы непрерывно передаются в блок управления тормозом, чтобы предотвратить возникновение колебаний в колебательной системе в процессе торможения.
15. Система управления по п.14, отличающаяся тем, что блок управления тормозом включает тахометр для непрерывного измерения скорости движения тросового барабана, генератор линейной функции для ввода установочной величины скорости, ограниченной резким движением, контроллер скорости с регулятором силы вторичного торможения для регулирования режима работы клапана управления тормозом и переключатель для инициирования аварийного торможения.
Текст
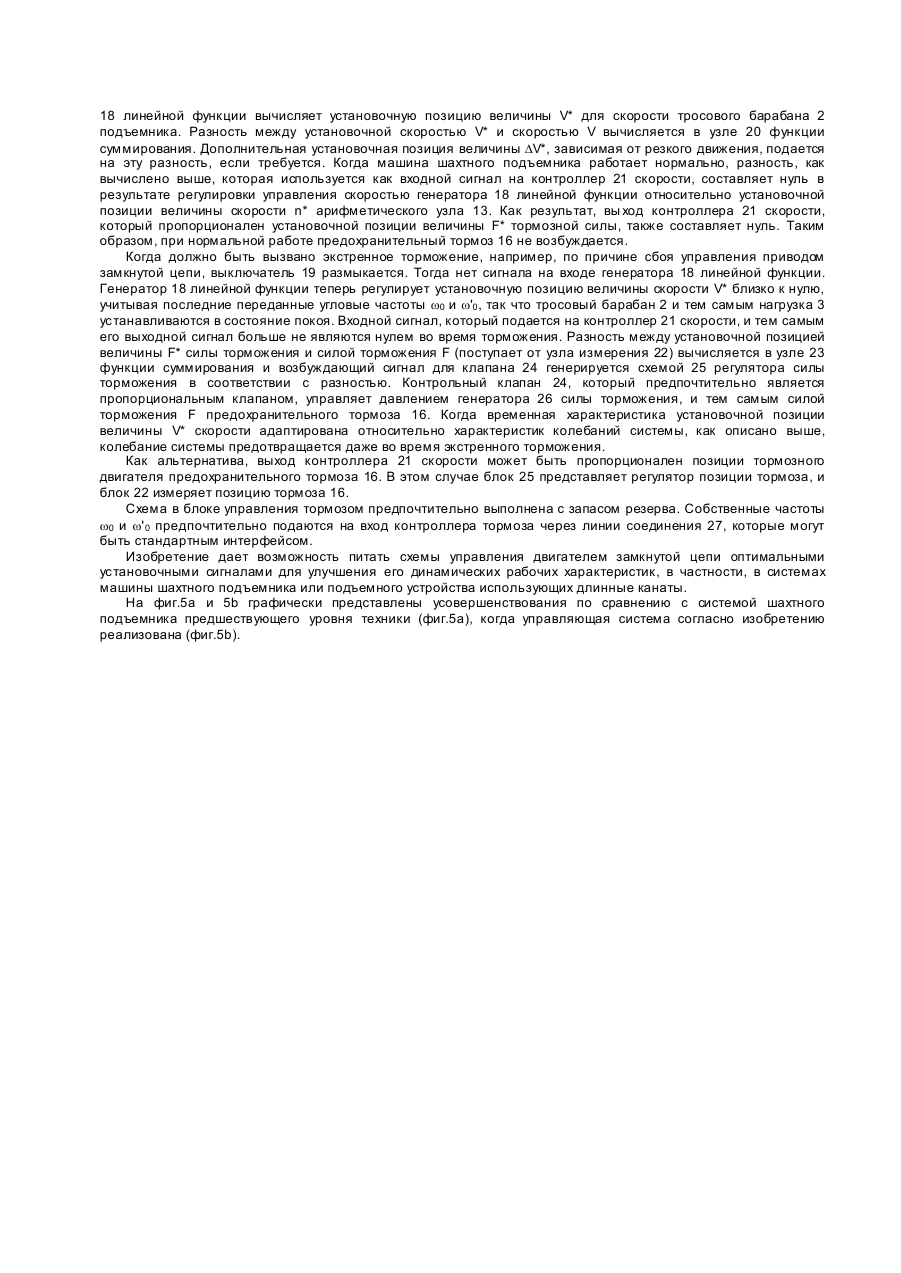
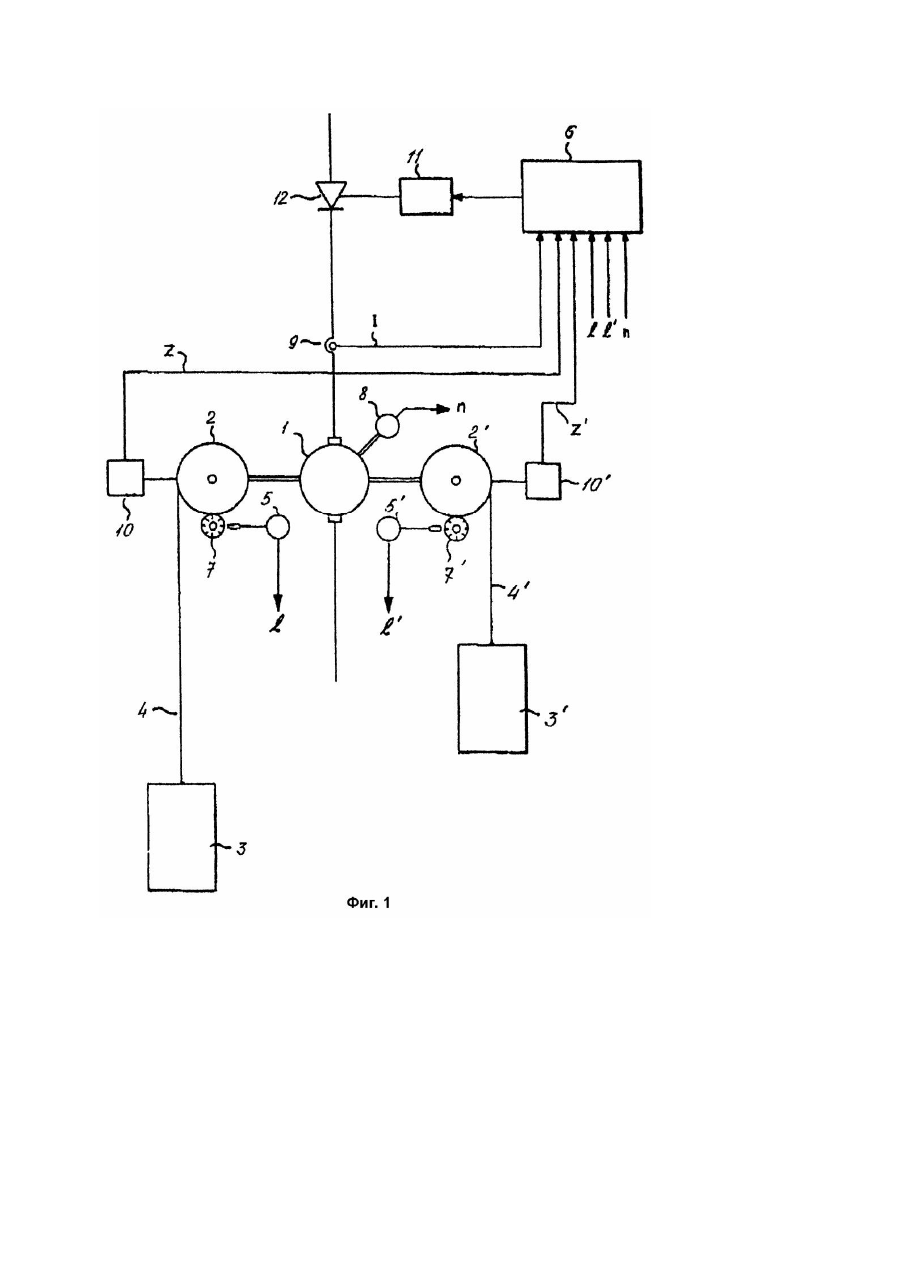
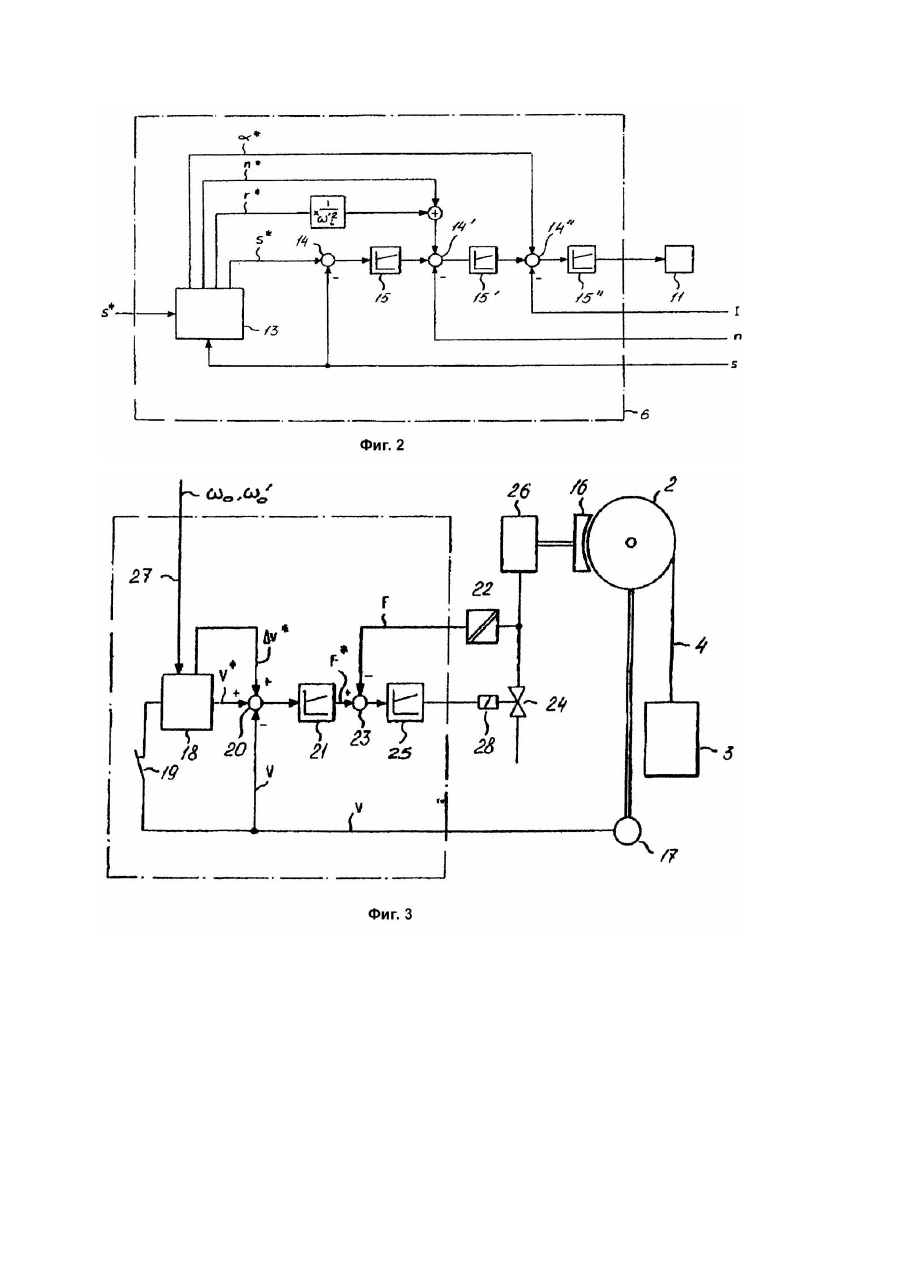
Изобретение касается системы управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы. В шахтной подъемной машине или подъемнике обычно используют электрический двигатель, который соединен по крайней мере с одним тросовым барабаном, и обычно с двумя тросовыми барабанами. Транспортное средство прикрепляют к свободному концу троса, который наматывается на барабан, так что вращение барабана поднимает или опускает транспортное средство в ша хтном стволе. Обычно устройство наматывания таково, что одно транспортное средство поднимается, тогда как другое опускается. Известна система управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы, выполненная с транспортным средством, поддерживаемым тросом и образующая колебательную систему которая содержит датчик нагрузки, предназначенный для постоянного контролирования нагрузки на трос и для посылки соответствующего сигнала нагрузки; датчик длины троса, постоянно контролирующий длину троса, сматываемого с тросового барабана, и для посылки соответствующего сигнала относительно длины троса; датчик скорости, для измерения скорости вращения двигателя и для посылки соответствующего сигнала относительно скорости вращения двигателя; датчик силы тока, для измерения силы тока, забираемой двигателем, и для посылки соответствующего сигнала относительно силы тока двигателя; блок управления двигателем с вводами для сигнала нагрузки, сигнала длины троса, сигнала скорости вращения двигателя и сигнала силы тока двигателя для генерирования сигнала управления двигателем и блок привода двигателя, чутко реагирующий на сигнал управления двигателем для изменения силы тока, подаваемой в двигатель. В известной системе управления используются попытки обеспечения точного управления двигателем подъемника. Однако глубинные стволы шахт типа, которые встречаются в золотодобывающей промышленности, требуют тросов большой длины. В таких системах происходят колебательные движения в гибкой системе, содержащей транспортное средство, тросы, инерцию двигателя и наматывающих барабанов и возможно други х перемещающи хся масс в системе. Такие колебания вызываются, в частности, ускорениями наматывающего барабана, которые происходят во время нормальной намотки и во время экстренного торможения. Эффект состоит в продольном динамическом перемещении транспортного средства на конце троса с нежелательно большой амплитудой, что вызывает повышенную нагрузку растяжения троса. Это требует использования более прочных тросов по сравнению с работой в стабильном состоянии, что увеличивает массу и стоимость троса и ограничивает возможность достижения глубины шахтного ствола. Поэтому задача настоящего изобретения состоит в создании системы управления для нормальной работы и экстренного торможения, которая (система) снижает продольные колебания. Технический результат, достигаемый изобретением, обусловленный вышеуказанной задачей, достигается за счет того, что в известном устройстве того же назначения блок управления двигателем выполнен с арифметическим устройством для вычисления установочных величин для скорости, ускорения и резкого движения колебательной системы, а также средством обработки для вычисления периодов собственных мод колебания колебательной системы или ее части на основе сигнала длины троса и сигнала нагрузки троса, для сравнения установочных величин с входными сигналами и для генерирования сигнала управления двигателем с компонентом, который связан с характеристиками собственного колебания колебательной системы или ее части, чтобы предотвратить возбуждение колебаний в системе, колебательная система включает транспортное средство, трос, шкив, канатный барабан и электродвигатель. Колебательная система включает пару транспортных средств с соответствующими тросами, шкивами и канатными барабанами. Характеристика собственного колебания колебательной системы или ее части является основной частотой колебания этой системы. Блок управления двигателем выполнен с возможностью подачи дополнительной установочной величины скорости, сравниваемой с установочной величиной скорости в течение периодов резкого движения. Блок управления двигателем выполнен с возможностью определения дополнительной установочной величины скорости, представленной установочной величиной резкого движения, деленной на квадрат угловой частоты собственной моды колебания колебательной системы или ее части. Блок управления двигателем выполнен с возможностью реагирования на датчики длины троса и датчики нагрузки, чтобы рассчитать период собственных мод колебаний колебательной системы или ее части на основе длин троса и величины нагрузок, которые переносят транспортные средства, и чтобы рассчитать их установочные величины. Арифметическое устройство блока управления двигателем выполнено с возможностью вычисления установочных величин с учетом моментов инерции тросовых барабанов и двигателя. Каждый датчик длины троса выполнен с круговым кодером, связанным с каждым тросовым барабаном. Каждый датчик длины троса выполнен с датчиком абсолютной позиции, связанным с электродвигателем. Один или оба датчика длины троса выполнены с возможностью считывания как смещения, так и направления смещения троса, с которым он или они связан. Один или оба датчика нагрузки выполнены с возможностью измерения нагрузки на шкиву, поддерживающему трос, и с которым связан датчик нагрузки. Арифметическое устройство блока управления двигателем выполнено с возможностью вычисления массы одного или обоих тросов на основе выходного сигнала соответствующего датчика длины троса и массы на единицу длины троса. Блок управления двигателем соединен с блоком управления тормозом с помощью коммуникационной связи, через которую угловые частоты мод собственного колебания колебательной системы непрерывно передаются в блок управления тормозом, чтобы предотвратить возникновение колебаний в колебательной системе в процессе торможения. Блок управления тормозом включает тахометр для непрерывного измерения скорости движения тросового барабана, генератор пилообразной функции для ввода установочной величины резкое движение - ограниченная скорость, регулятор скорости с регулятором силы вторичного торможения для регулирования режима работы клапана управления тормозом и переключатель для инициирования аварийного торможения. Благодаря применению в данном техническом решении согласно изобретению достигается нормальная работа системы управления электродвигателем и экстренное торможение с одновременным снижением продольных колебаний. На фиг. изображено устройство машины шахтного подъемника согласно изобретению; на фиг.2 - блок-схема системы управления двигателем замкнутой цепи для устройства на фиг.1; на фиг.3 - блок-схема схемы управления тормозом замкнутой цепи для системы на фиг.1; на фиг.4a - 4c - схемы, показывающие установочные позиции, генерируемые системой; на фиг.5a - 5b - графики сравнения характеристики системы согласно изобретению с системой предшествующе го уровня техники. Изобретение представляющее систему управления электродвигателем для привода тросового барабана шахтной подъемной машины и тросовой системы, включающую в себя транспортное средство, поддерживаемое тросом, и образующую колебательную систему, содержит датчик нагрузки, предназначенный для постоянного контролирования нагрузки на трос и для посылки соответствующего сигнала нагрузки; датчик длины троса, постоянно контролирующий длину троса, сматываемого с тросового барабана, и для посылки соответствующего сигнала относительно длины троса; датчик скорости, для измерения скорости вращения двигателя и для посылки соответствующего сигнала относительно скорости вращения двигателя; датчик силы тока, для измерения силы тока, забираемой двигателем, и для посылки соответствующего сигнала относительно силы тока двигателя; блок управления двигателем с вводами для сигнала нагрузки, сигнала длины троса, сигнала скорости вращения двигателя и сигнала силы тока двигателя для генерирования сигнала управления двигателем, и блок привода двигателя, чутко реагирующий на сигнал управления двигателем для изменения силы тока, подаваемой в двигатель, при этом блок управления двигателем выполнен с арифметическим устройством для вычисления установочных величин для скорости, ускорения и резкого движения колебательной системы, а также средством обработки для вычисления периодов собственных мод колебания колебательной системы или ее части на основе сигнала длины троса и сигнала нагрузки троса для сравнения установочных величин с входными сигналами и для генерирования сигнала управления двигателем с компонентом, который связан с характеристиками собственного колебания колебательной системы или ее части, чтобы предотвратить возбуждение колебаний в системе, которая включает транспортное средство, трос, шкив, канатный барабан и электродвигатель; колебательная система включает пару транспортных средств с соответствующими тросами, шкивами и канатными барабанами; причем характеристика собственного колебания колебательной системы или ее части является основной частотой колебания этой системы; блок управления двигателем выполнен с возможностью подачи дополнительной установочной величины скорости, сравниваемой с установочной величиной скорости в течение периодов резкого движения; блок управления двигателем выполнен с возможностью определения дополнительной установочной величины скорости, представленной установочной величиной резкого движения, деленной на квадрат угловой частоты собственной моды колебания колебательной системы или ее части; блок управления двигателем выполнен с возможностью реагирования на датчики длины троса и датчики нагрузки, чтобы рассчитать период собственных мод колебаний колебательной системы или ее части на основе длин троса и величины нагрузок, которые переносят транспортные средства, и чтобы рассчитать их установочные величины; арифметическое устройство блока управления двигателем выполнено с возможностью вычисления установочных величин с учетом моментов инерции тросовых барабанов и двигателя; каждый датчик длины троса выполнен с круговым кодером, связанным с каждым тросовым барабаном; каждый датчик длины троса выполнен с датчиком абсолютной позиции, связанным с электродвигателем; один или оба датчика длины троса выполнены с возможностью считывания как смещения, так и направления смещения троса, с которым он или они связаны; один или оба датчика нагрузки выполнены с возможностью измерения нагрузки на шкиву, поддерживающему трос и с которым связан датчик нагрузки; арифметическое устройство блока управления двигателем выполнено с возможностью вычисления массы одного или обоих тросов на основе выходного сигнала соответствующего датчика длины троса и массы на единицу длины троса; блок управления двигателем соединен с блоком управления тормозом с помощью коммуникационной связи, через которую угловые частоты мод собственного колебания колебательной системы непрерывно передаются в блок управления тормозом, чтобы предотвратить возникновение колебаний в колебательной системе в процессе торможения; блок управления тормозом включает тахометр для непрерывного измерения скорости движения тросового барабана, генератор пилообразной функции для ввода установочной величины резкое движение - ограниченная скорость, регулятор скорости с регулятором силы вторичного торможения для регулирования режима работы клапана управления тормозом и переключатель для инициирования аварийного торможения. Обращаясь прежде всего к фиг.1, электрический двигатель 1 имеет спаренные выходные валы, которые соединены с двумя тросовыми барабанами 2 и 2'. Нагрузки 3 и 3' (типично шахтные транспортные средства перевозки) соединены с тросами 4 и 4', которые намотаны на барабаны 2 и 2'. Барабаны 2 и 2' соединены с двигателем 1 таким образом, что когда нагрузка 3 опускается, нагрузка 3' поднимается, и наоборот. Следует отметить, что вместо двигателя, имеющего сдвоенные выходные валы, может использоваться двигатель, с одним валом с соответствующей системой передачи. Блоки 5 и 5' измерения длины троса, которые предусмотрены, контролируют длину каната, который сматывается с каждого барабана, и генерируют соответствующие сигналы длины каната l и l', которые подаются на управляющий блок 6, который может содержать программируемый логический контроллер (PLC). Блоки 5 и 5' измерения длины троса измеряют длины соответствующи х тросов 4 и 4' путем детектирования вращения и направления вращения вращающихся ши фраторов 7 и 7', которые соединены с барабанами 2 и 2'. Вместо измерительных блоков 5 и 5' длины тросов могут измеряться также путем использования датчика абсолютного положения, соединенного с двигателем 1. Тахогенератор 8 измеряет скорость вращения двигателя 1 и генерирует сигнал скорости n, который также подается на управляющий блок 6. Аналогичным образом ток двигателя измеряется датчиком тока 9, и сигнал l, соответствующие величине тока двигателя, подается от датчика тока 9 на управляющий блок 8. Наконец, блоки измерения нагрузки 10 и 10' измеряют мгновенные величины нагрузок натяжения в тросах 4 и 4' и образуют выходные сигналы Z и Z', соответствующие им, которые подаются на управляющий блок 6. Управляющий блок 6 управляет контроллером 11 переменного тока, который управляет подачей тока на двигатель 1 через блок преобразователя 12. Следует отметить, что двигатель 1 может быть любого типа (переменного тока или постоянного тока) и может быть выполнен в любой соответствующей конфигурации привода с переменной скоростью. Ток, подаваемый блоком 12 преобразователя, показан для упрощения, как единственный элемент, но мог бы содержать цепи поля и якоря, а также многие фазы в случае приводов переменного тока. По существу контроллер переменного тока регулирует ток(и) подаваемый на двигатель, так что производимый крутящий момент эффективно управляется управляющей схемой l. В случае системы с приводом переменного тока контроллер 11 переменного тока будет также управлять частотой тока(ов) через преобразователь 12. Блоки 10 и 10' измерения нагрузки измеряют растягивающие нагрузки в тросах путем измерения нагрузок на шкивы (не показаны) основного привода системы шахтного подъемника. Величины M и M', соответствующие массам нагрузок 3 и 3', могут быть вычислены из выходных сигналов Z и Z' блоков измерения нагрузки, учитывая массу на единицу длины p и p' канатов и вычисленные длины l и l' канатов. Нагрузки 3 и 3' с их взаимодействующими канатами 4 и 4' вместе с тросовыми барабанами 2 и 2' и двигателем 1 образуют компоненты колебательной системы. Когда приводной двигатель стационарный, тросовые барабаны 2 и 2' также стационарные. Нагрузки 3 и 3' с их взаимодействующими тросами 4 и 4' содержат системы пружины/массы, которые разъединены. Когда двигатель 1 функционирует, это изменяется. Во-первых, системы пружины/массы, содержащие соответствующие нагрузки и тросы, соединяются через двигатель 1. Длины L и L' тросов 4 и 4' изменяются непрерывно, тем самым изменяя собственную колебательную частоту двух систем пружины/массы. Результирующий момент инерции двигателя 1 и тросовых барабанов 2 и 2' остается почти постоянным, потому что когда нагрузка 3' опускается, нагрузка 3 поднимается и наоборот. Это означает, что увеличение момента инерции барабана 2, вызываемое тросом, который наматывается, почти в равной степени, согласуется в результате снижения момента инерции тросового барабана 2', происходящее одновременно. Однако характеристики колебания системы могут тем не менее изменяться в результате соединения систем пружина/масса. Однако, вообще говоря, электрическое управление двигателем 1 является достаточно "жестким" для обеспечения, чтобы системы пружины/массы могли рассматриваться как разъединенные, даже когда двигатель работает. Теперь будет рассматриваться ситуация, когда двигатель 1 является стационарным. Практически, это также является наиболее важным случаем, как это происходит во время пуска и останова двигателя, эти колебания могут вызываться ускорением или замедлением, которое происходит. В разъединенном положении, как сказано выше, угловая частота wi , собственных (резонансных) колебаний системы пружина/масса, вычисляется путем решения уравнения: Zitan (Zi) = pl/M (1) при Zi = Wil p / EA , где E - эффективный модуль Юнга, и A - площадь поперечного сечения стали каната 7, и wi, определяется как (2) wi = 2p / T, где Ti - период режима собственной частоты колебаний системы, и i может быть величинами 0, 1, 2 ... Основная собственная частота колебаний системы определяется путем уравнения (1) при наименьшей величине w0 или наибольшей величине T0. Гармоники определяются из других решений. Аналогичные уравнения применяются для второй системы, содержащей нагрузку 3' и трос 4'. Величины нагрузки Z и Z' в тросах 4 и 4' подаются с блоком 10 и 10' измерения нагрузки на управляющий блок 6 вместе с вычисленными фактическими длинами тросов L и L' от блоков 5 и 5' измерения длин тросов. Управляющий блок 6 тогда вычисляет массы M и M' нагрузок 3 и 3' и по очереди собственным частоты w и w' разъединенных систем, используя известные модули Юнга E и E', площади A и A' поперечного сечения тросов и массы на единицу длины p и p' тросов 4 и 4'. Управляющий блок 6 вычисляет угловые частоты w и w' непрерывно. Когда требуется изменение скорости либо путем ручного управления со стороны оператора, либо посредством загруженной в ЗУ программы, управляющий блок 1 вычисляет установочные позиции величин n', a' и r' в отношении скорости, углового ускорения и "резкого движения" двигателя 1, так что колебания не возбуждаются в двух колебательных системах. "Резкое движение" r, относится ко второй производной скорости по отношению ко времени, т.е. 2 2 (3) r = d n / dt , Устранение возбуждения колебания может, например, достигаться путем образования периодов резких движений (периоды, в которых резкое движение r не равно нулю) равными периоду собственных колебаний системы. Это, в частности, важно, чтобы не возбуждался основной режим при самой низкой частоте двух разъединенных систем (предположим w0), так как результирующие колебания имеют самую высокую амплитуду. Как в альтернативном или дополнительном варианте, дополнительная установочная позиция величины Dn* скорости может быть добавлена к установочной позиции величины n* скорости для подавления колебаний в другом режиме системы или для дальнейшего подавления колебаний в том же режиме. Эта дополнительная установочная позиция величины скорости равна установочной позиции величины резкого движения r*, поделенной на квадрат угловой частоты выбранного режима. Основной режим разъединенной системы не выбравшей установочную позицию величины периода резкого движения, обычно выбирается для вычисления дополнительной установочной позиции величины, т.е. (4) Dn* = r * / w2 , 0 Использование дополнительной установочной позиции величины скорости в зависимости от резкого движения будет именоваться как "компенсация". Когда используется такая "компенсация", не имеет значения, чтобы период резкого движения согласовался с периодом режима собственных колебаний, как описано выше, хотя это обычно делается. На фиг.2 показана блок-схема системы автоматического управления двигателем (блок 6) на фиг.1. Блок включает в себя арифметический узел 13, который адаптирован принимать установочную позицию величины S*, например, для нагрузки 3, либо снаружи, либо от программы, загруженной в ЗУ управляющего блока. Арифметический узел 13 вычисляет контрольные установочные позиции величин S*, a* и r* для управления двигателем 1 на основе разницы между установочной позицией величины S* и фактической позицией S нагрузки 3. Арифметический узел 13 подает на выход установочные позиции величин n*, a* и r* и установочную позицию величины S*. Установочные позиции величины величины n*, a* и r*, а также установочная позиция величины Dn* дополнительной скорости, образуемые управляющим блоком, показаны на фиг. с 4a по 4c. Разность между установочной позицией величины S* и позицией S нагрузки 3 вычисляется в узле 14 функции суммирования. Разность подается как входной сигнал на позиционный контроллер 16, выходным сигналом которого является установочная позиция скорости. При ручной работе управляющей системы эта установочная позиция величины устанавливается оператором. Величина установочной позиции скорости ограничивается до величины n * +r * / w2 , и разность из установочных позиций скорости, полученная таким образом, и скорости n вычисляется 0 на другом узле 14' суммирования. Выход этого узла подается как входной сигнал на контроллер 15' скорости, выходной сигнал которого является установочной позицией величины тока, ограничивается аналогичным образом посредством установочной позиции величины углового ускорения a* до вычисления разности между этой величиной и током 1 двигателя 1 в третьем узле 14" функции суммирования. Эта разностная величина служит в качестве входного сигнала на другой контроллер 15" тока, выходной сигнал которого управляет контроллером 11 переменного тока. "Компенсация" также может использоваться для подавления колебаний в двух режимах системы одновременно. В этом случае установочная позиция величины Dn* дополнительной скорости является взвещенной суммой установочной позиции величины r* резкого двидения и второй производной относительно времени установочной позиции величины d2r/dt2. Если собственные частоты wx и wy должны быть компенсированы, установочная позиция величины дополнительной скорости определяется из: r* æ 1 æ 1 ö d2 r * 1 ö (5) Dn* = ç 2 + 2 ÷ + ç 2 2 ÷ 2 . çw ÷ ç w w ÷ dt wy ø è x è x yø Если должна быть произведена компенсация двух режимов, должна использоваться контрольная функция скорости n* с конечной четвертой производной d4n*/dt4. Две функции, которые удовлетворяют это требование, следующие: 1. Постоянная четвертая производная d4n * 32d =± m *. 4 T0 dt 2. Контрольная функция a* циклоидального переднего ускорения: a' m * æ 2p t 2pt ö ÷, ×ç - sin 2p ç T0 T0 ÷ è ø где am* - максимальная установочная позиция величины ускорения; Т0 - время резкого движения. Управляющий блок 6 управляет двигателем 1 путем управления позицией и управления вторичной скоростью и током. В этом случае управление током эквивалентно управлению ускорением. Двигатель 1 быстро следует управлению через установочные позиции величин n*, a* и r* с типичными периодами задержки менее 0,1с. В результате предотвращения нежелательных колебаний в тросах 4 и 4', пики нагрузки в тросах снижаются, и тем самым можно использовать тросы с меньшим поперечным сечением или производить подъем более тяжелых нагрузок с более глубоких глубин. Условие соединенных систем пружина/масса должно также учитываться в случае, когда рабочие параметры приводного двигателя 1 изменяются во время работы, например, когда скорость n и условие разъединенных систем не могут быть учтены. В этом случае собственные колебания системы могут быть определены, используя результаты системы имитирования или опытных испытаний, если вычислительная операция слишком сложная или невозможна по иной причине. Преимущества описанной системы могут быть реализованы только в случае, если нежелательные колебания в тросах снижены при любых условия х, т.е. даже когда шахтный подъемник подвергается механическому экстренному останову. Поэтому выгодно, когда механические предохранительные тормоза, которые обычно монтируются на тросовых барабанах 2 и 2', также управляются как описано выше. На фиг.3 показана блок-схема управляющей схемы замкнутой цепи для механического предохранительного тормоза 16, взаимодействующего с тросовым барабаном 2. Вообще говоря, каждый тросовый барабан 2 и 2' будет иметь по крайней мере два механических предохранительных тормоза. Однако по причинам ясности изображения показан только один предохранительный тормоз. Скорость V барабана 2 непрерывно измеряется тахометром 17, выход которого подается на генератор линейной функции 18 как входной сигнал через выключатель 19, который замкнут во время нормальной операции. Генератор линейной функции 18 непрерывно принимает сигналы, соответствующие угловым частотам wо и w'0 и другим возможным угловым частотам, вычисленным управляющим блоком 6. Принимая во внимание переданные угловые частоты w0 и w' 0, генератор a* = ± 18 линейной функции вычисляет установочную позицию величины V* для скорости тросового барабана 2 подъемника. Разность между установочной скоростью V* и скоростью V вычисляется в узле 20 функции суммирования. Дополнительная установочная позиция величины DV*, зависимая от резкого движения, подается на эту разность, если требуется. Когда машина шахтного подъемника работает нормально, разность, как вычислено выше, которая используется как входной сигнал на контроллер 21 скорости, составляет нуль в результате регулировки управления скоростью генератора 18 линейной функции относительно установочной позиции величины скорости n* арифметического узла 13. Как результат, вы ход контроллера 21 скорости, который пропорционален установочной позиции величины F* тормозной силы, также составляет нуль. Таким образом, при нормальной работе предохранительный тормоз 16 не возбуждается. Когда должно быть вызвано экстренное торможение, например, по причине сбоя управления приводом замкнутой цепи, выключатель 19 размыкается. Тогда нет сигнала на входе генератора 18 линейной функции. Генератор 18 линейной функции теперь регулирует установочную позицию величины скорости V* близко к нулю, учитывая последние переданные угловые частоты w0 и w'0 , так что тросовый барабан 2 и тем самым нагрузка 3 устанавливаются в состояние покоя. Входной сигнал, который подается на контроллер 21 скорости, и тем самым его выходной сигнал больше не являются нулем во время торможения. Разность между установочной позицией величины F* силы торможения и силой торможения F (поступает от узла измерения 22) вычисляется в узле 23 функции суммирования и возбуждающий сигнал для клапана 24 генерируется схемой 25 регулятора силы торможения в соответствии с разностью. Контрольный клапан 24, который предпочтительно является пропорциональным клапаном, управляет давлением генератора 26 силы торможения, и тем самым силой торможения F предохранительного тормоза 16. Когда временная характеристика установочной позиции величины V* скорости адаптирована относительно характеристик колебаний системы, как описано выше, колебание системы предотвращается даже во время экстренного торможения. Как альтернатива, выход контроллера 21 скорости может быть пропорционален позиции тормозного двигателя предохранительного тормоза 16. В этом случае блок 25 представляет регулятор позиции тормоза, и блок 22 измеряет позицию тормоза 16. Схема в блоке управления тормозом предпочтительно выполнена с запасом резерва. Собственные частоты w0 и w' 0 предпочтительно подаются на вход контроллера тормоза через линии соединения 27, которые могут быть стандартным интерфейсом. Изобретение дает возможность питать схемы управления двигателем замкнутой цепи оптимальными установочными сигналами для улучшения его динамических рабочих характеристик, в частности, в системах машины шахтного подъемника или подъемного устройства использующих длинные канаты. На фиг.5a и 5b графически представлены усовершенствования по сравнению с системой шахтного подъемника предшествующего уровня техники (фиг.5a), когда управляющая система согласно изобретению реализована (фиг.5b).
ДивитисяДодаткова інформація
Автори англійськоюGreenway Malcolm Ernest, Schmitt Winfrid E.
Автори російськоюГринуэй Малколм Эрнест, Шмитт Винфрид Э.
МПК / Мітки
МПК: B66B 1/00
Мітки: підіймальної, електродвигуном, приводу, системі, управління, шахтної, система, машини, тросової, тросового, барабана
Код посилання
<a href="https://ua.patents.su/9-26520-sistema-upravlinnya-elektrodvigunom-dlya-privodu-trosovogo-barabana-shakhtno-pidijjmalno-mashini-i-trosovo-sistemi.html" target="_blank" rel="follow" title="База патентів України">Система управління електродвигуном для приводу тросового барабана шахтної підіймальної машини і тросової системи</a>
Пристрій управління запобіжним гальмом підіймальної машини
Номер патенту: 5617
Опубліковано: 28.12.1994
Автори: Бєліков Микола Лаврентійович, Григор'єв Валерій Васильович
МПК: F15B 11/00, B66B 5/16
Мітки: машини, управління, пристрій, підіймальної, гальмом, запобіжним
Текст:
...з'єднана з виходів двохпозиційного трьохлінійного розподільника блоку відпрацювання параметрів першого і другого ступенів галь- 35 мування, згідно з винаходом має функціональний блок швидкості І редукційний клапан, який з'єднаний своїм входом до джерела тиску, а виходом - до входу розподільника блоку відпрацювання 40 параметрів першого І другого ступенів гальмування, сполученного другим своїм виходом о атмосферою І виконаним з...
Спосіб визначення параметрів системи управління з двигуном постійного струму та пристрій для його здійснення
Номер патенту: 20167
Опубліковано: 25.12.1997
Автор: Аркадьєв Віктор Юрьєвич
МПК: G01R 31/34, G06G 7/00, H02K 15/00
Мітки: управління, пристрій, визначення, здійснення, двигуном, спосіб, системі, струму, параметрів, постійного
Формула / Реферат:
1. Способ определения параметров систем управления с двигателем постоянного тока, включающий измерение тока і и напряжения U якоря двигателя, скачкообразное изменение задающего воздействия от блока задающих сигналов, отличающийся тем, что используют активно-индуктивную (RL) нагрузку, а действие внутренней связи по электродвижущей силе (ЭДС) двигателя постоянного тока реализуют на основе преобразования контура регулирования тока и с помощью...
Система іскробезпечного електроживлення від мережі змінного струму схем дистанційного управління шахтної автоматики
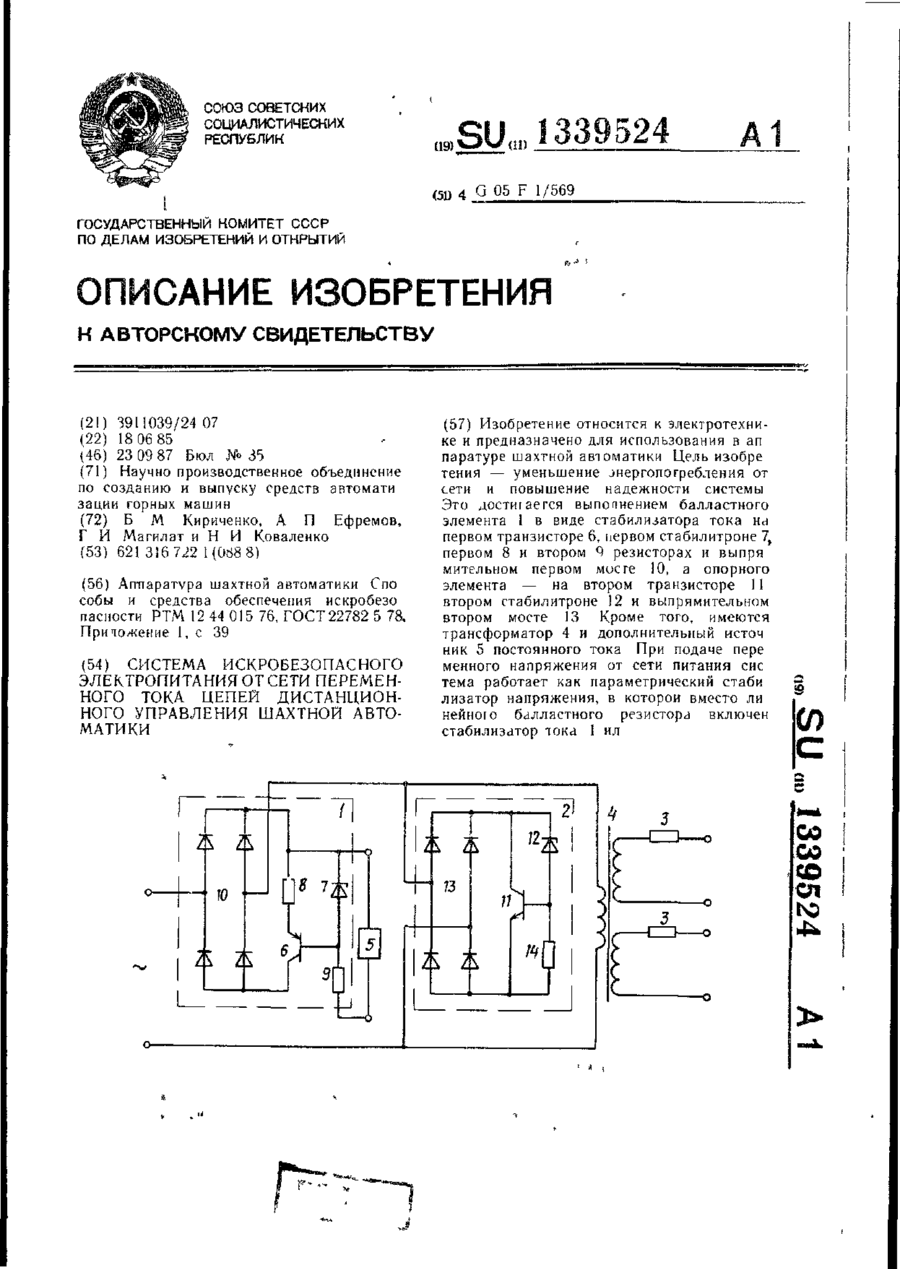
Номер патенту: 7595
Опубліковано: 29.09.1995
Автори: Магілат Генадій Йосипович, Єфремов Олександр Петрович, Кириченко Борис Мефодієвич, Коваленко Наталія Іванівна
МПК: G05F 1/569
Мітки: змінного, мережі, струму, дистанційного, автоматики, електроживлення, схем, система, управління, шахтної, іскробезпечного
Формула / Реферат:
Система искробезопасного электропитания от сети переменного тока цепей дистанционного управления шахтной автоматики, содержащая параметрический стабилизатор на балластном и опорном элементах и токсюграничивающие резисторы, отличающаяся тем, что, с целью уменьшения энергопотребления от сети и повышения надежности системы, в нее введены трансформатор и дополнительный источник постоянного тока, балластный элемент выполнен в виде стабилизатора...
Система управління електроприводом друкарської машини
Номер патенту: 12225
Опубліковано: 25.12.1996
Автори: Луцків Микола Михайлович, Волощак Ігор Андрійович, Верхола Михайло Іванович
МПК: B41F 33/00
Мітки: електроприводом, управління, машини, друкарської, система
Формула / Реферат:
Система управлення электроприводом печатной машины, содержащая электродвигатель печатного аппарата и электродвигатель фальцаппарата, связанные с соответствующими узлами управления скоростью вращения, импульсные датчики частоты вращения, кинематически связанные с электродвигателями и электрически - с первыми входами соответствующих счетчиков-преобразователей, выходами соединенных с первыми входами соответствующих блоков памяти, один из...
Пристрій для управління швидкістю електромагнітної муфти сковзання приводу гірничої машини
Номер патенту: 7613
Опубліковано: 29.09.1995
Автори: Кривущенко Микола Тимофійович, Дубінін Сергій Васильович, Мальцев Леонід Єгорович, Пуріс Олександр Іванович
МПК: H02P 15/00, E21C 35/24
Мітки: муфти, управління, електромагнітної, машини, пристрій, швидкістю, гірничої, приводу, сковзання
Формула / Реферат:
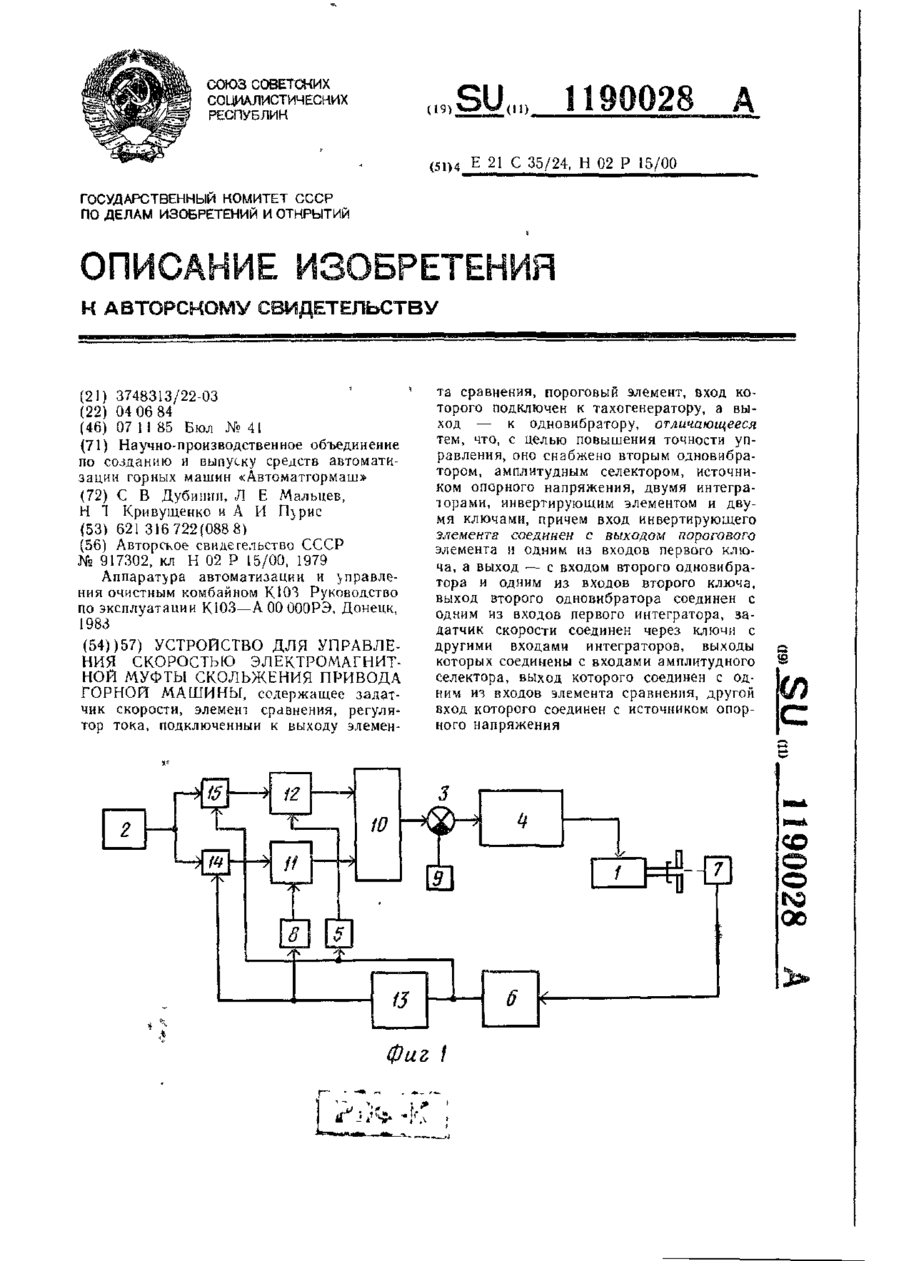
Устройство для управлення скоростью электромагнитной муфты скольжения привода горной машины, содержащее задатчик скорости, элемент сравнения, регулятор тока, подключенный к выходу элемента сравнения, пороговый элемент, вход которого подключен к тахогенератору, а выход - к одновибратору, отличающееся тем, что, с целью повышения точности управлення, оно снабжено вторым одновибратором, амплитудным селектором, источником опорного напряжения,...
Попередній патент: Спосіб одержання гранул кормової добавки для жуйних тварин
Наступний патент: Hизькокалорійhий харчовий продукт
Випадковий патент: Спосіб оцінки поетапного розвитку діабетичної нефропатії у жінок, хворих на цукровий діабет 2-го типу