Канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого частотно-часового методу вимірювання
Номер патенту: 59115
Опубліковано: 15.08.2003
Автори: Альошин Геннадій Васильович, Пашков Дмитро Павлович, Коломійцев Олексій Володимирович
Формула / Реферат
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком на підставі модернізованого частотно-часового методу, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після СПМ послідовно введений блок дефлекторів, керування яким здійснюють введеними блоком керування дефлекторами та керуючим елементом, після фотодетектора послідовно введений широкосмуговий підсилювач, а замість СП для отримання інформації про кути азимута ![]() і місця
і місця ![]() та величини і знаку кута відхилення ЛА від ручного супроводження за напрямком послідовно введені резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів
та величини і знаку кута відхилення ЛА від ручного супроводження за напрямком послідовно введені резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів ![]() по каналах кутів
по каналах кутів ![]() і
і ![]() , детектори, фільтри, формувачі імпульсів, введені опорний сигнал з частотою
, детектори, фільтри, формувачі імпульсів, введені опорний сигнал з частотою ![]() передавального лазера, “1”|”0” - тригери, схеми “і”, лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, введені вимірювальна інформація від каналу кутових швидкостей для уточнення похибки збігу по кутах каналів, підсилювачі сигналу похибки, виконавчі механізми відповідних кутів
передавального лазера, “1”|”0” - тригери, схеми “і”, лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, введені вимірювальна інформація від каналу кутових швидкостей для уточнення похибки збігу по кутах каналів, підсилювачі сигналу похибки, виконавчі механізми відповідних кутів ![]() і
і ![]() та електронно-цифрові обчислювальні машини для відображення вимірювальної інформації по каналах кутів
та електронно-цифрові обчислювальні машини для відображення вимірювальної інформації по каналах кутів ![]() і
і ![]() .
.
Текст
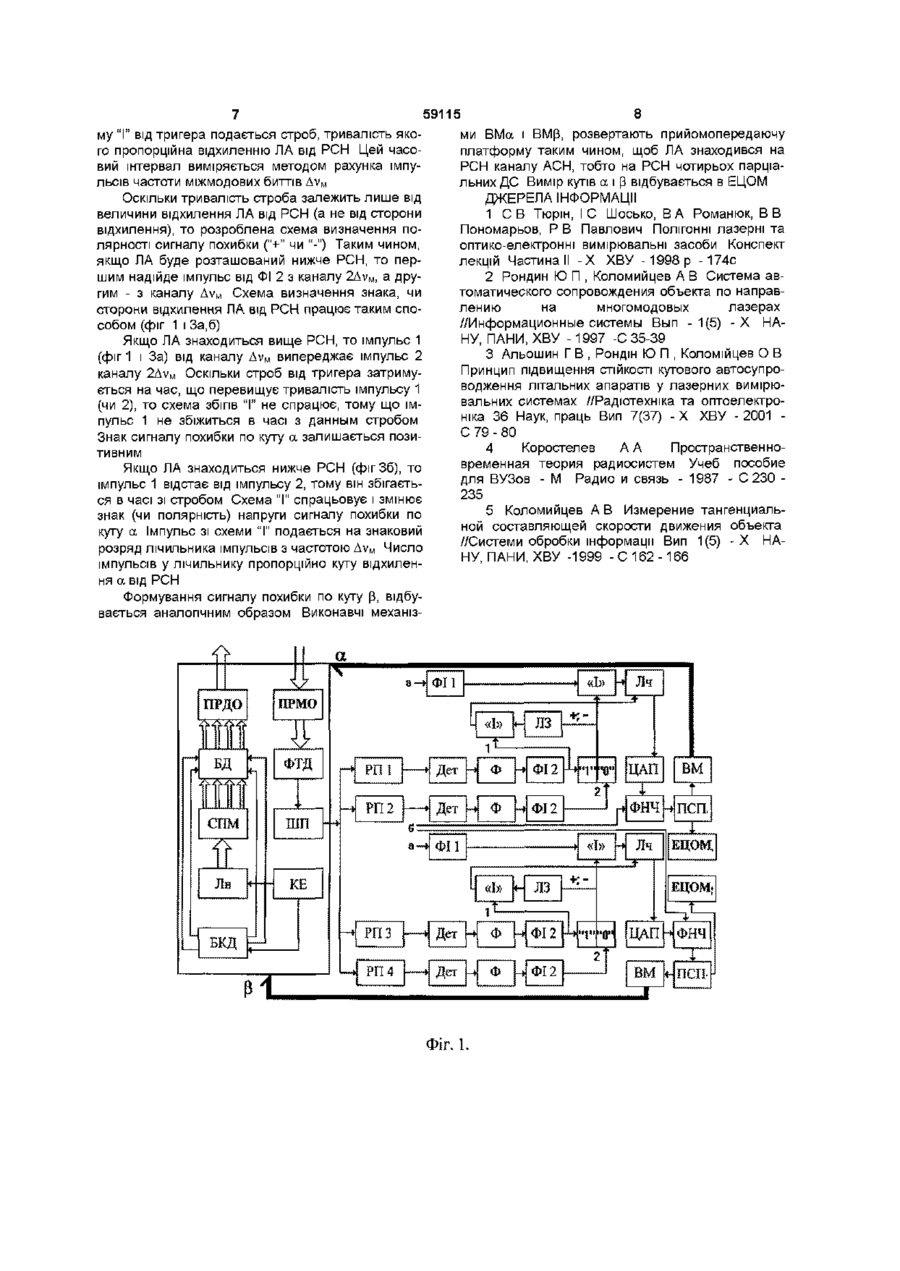
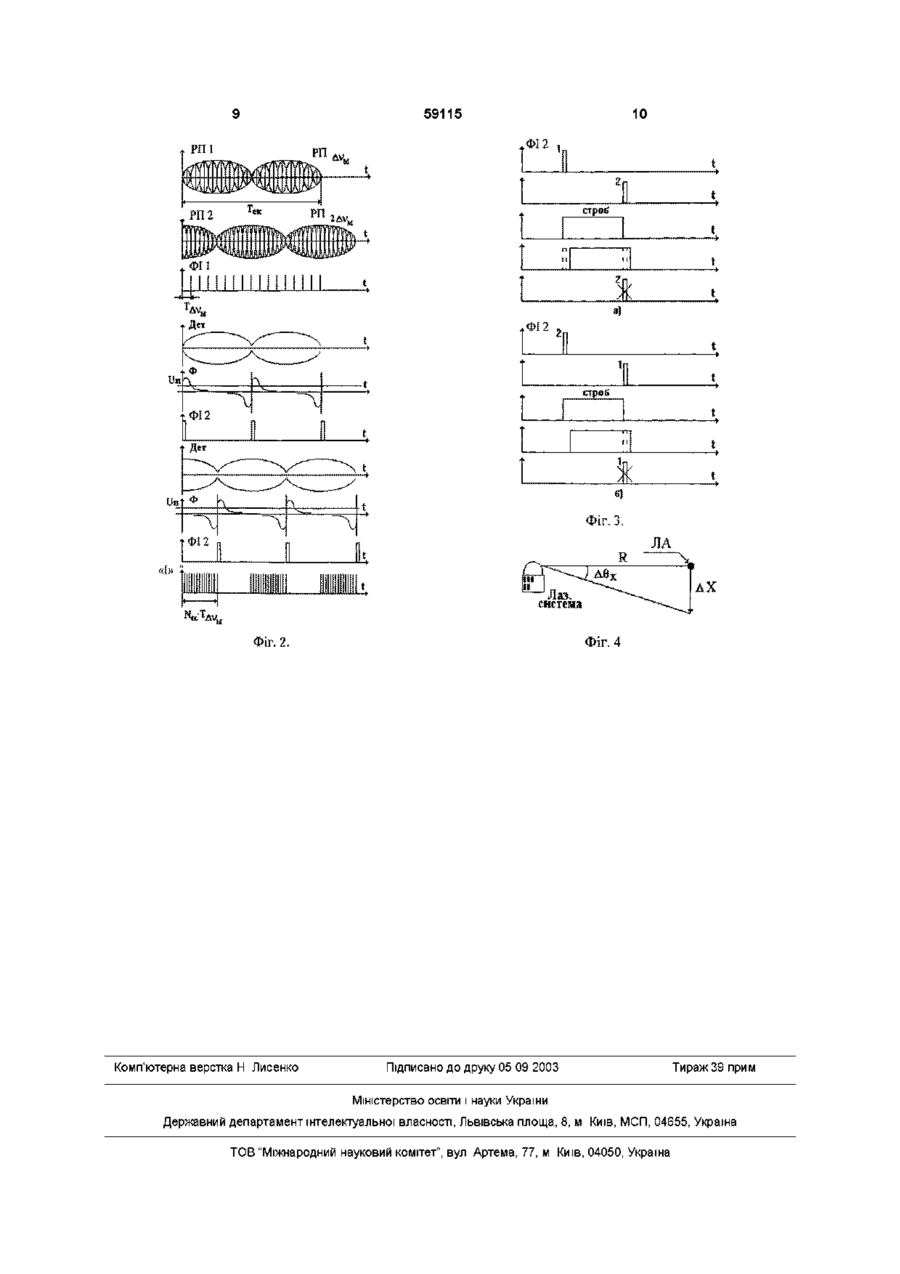
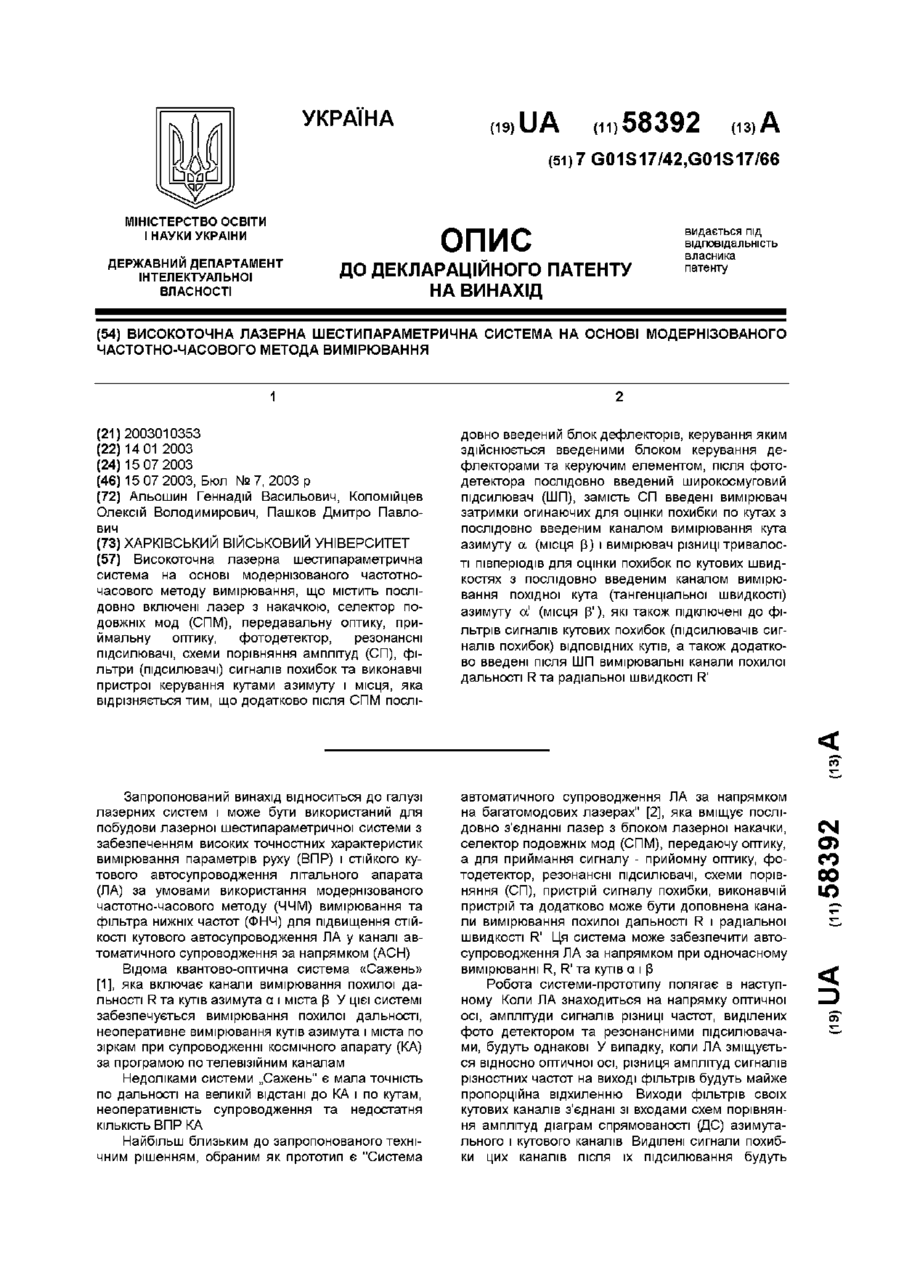
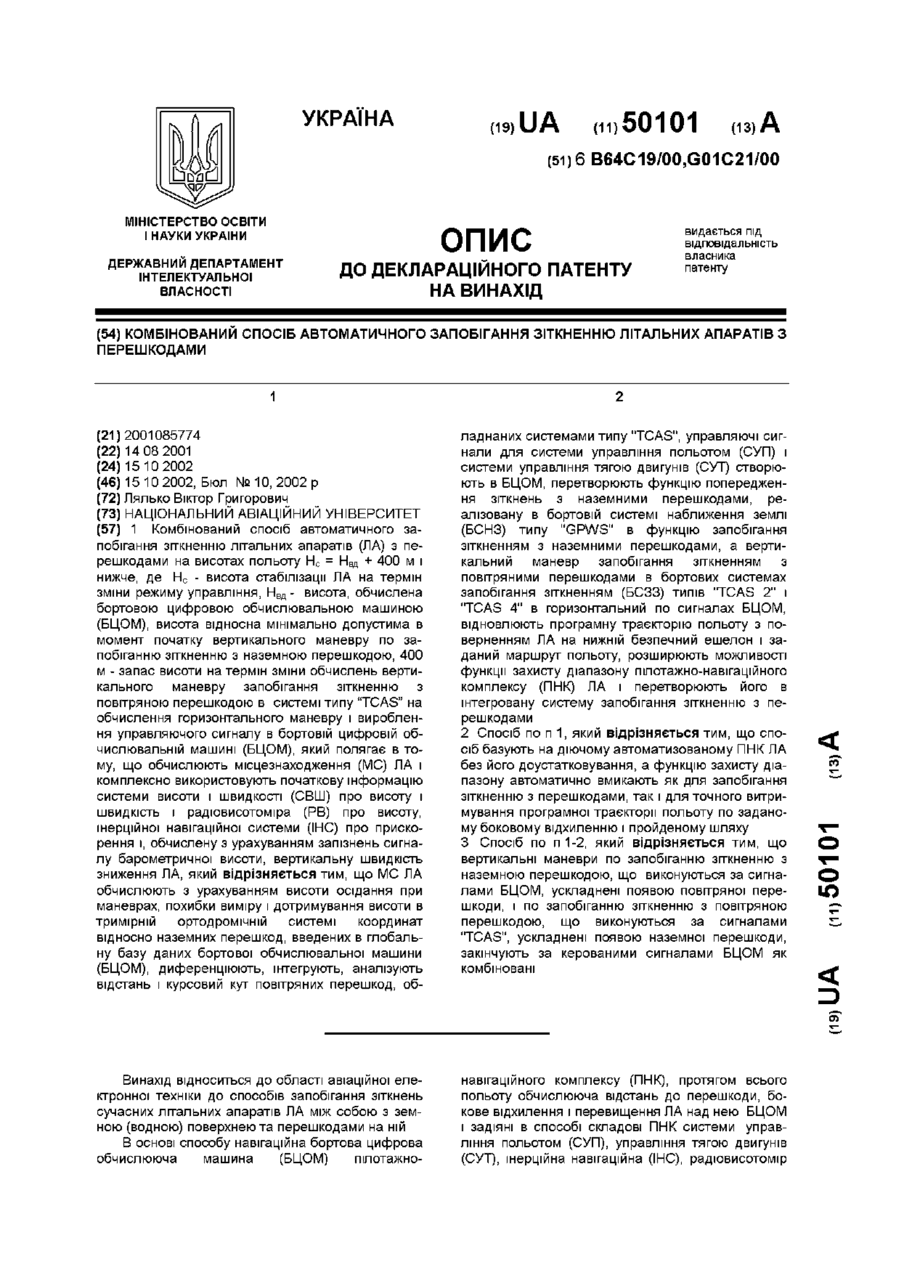
Канал автоматичного супроводження літальних апаратів (ЛА) за напрямком на підставі модернізованого частотно-часового методу, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння (СП) амплітуд, фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимута і місця, який відрізняється тим, що додатково після СПМ послідовно введений блок дефлекторів, керування яким здійснюють введеними блоком керування дефлекторами та керуючим еле Запропонований винахід відноситься до галузі лазерних систем і може бути використаний для побудови шестипараметричної лазерної вимірювальної системи (ЛВС), яка зможе забезпечити високі точності характеристики вимірювання параметрів руху (ВПР) і стійке кутове автосупроводження літального апарата (ЛА), за умовами використання модернізованого частотно-часового методу (ЧЧМ) вимірювання та фільтра нижніх частот (ФНЧ) у самому каналі автоматичного супроводження за напрямком (АСН) Відома квантово-оптична система «Сажень» [1], яка включає канали вимірювання похилої дальності R та кутів азимута а і міста р У цієї системі забезпечується вимірювання похилої дальності, неоперативне вимірювання кутів азимута і міста по зіркам при супроводженні космічного апарату (КА) за програмою по телевізійним каналам Недоліками системи „Сажень" є мала точність по дальності на великій відстані до КА і по кутам, ментом, після фотодетектора послідовно введений широкосмуговий підсилювач, а замість СП для отримання інформації про кути азимута а і місця Р та величини і знаку кута відхилення ЛА від ручного супроводження за напрямком послідовно введені резонансні підсилювачі, настроєні на ВІДПОВІДНІ частоти міжмодових битв (Av|y|,2Av|y|,3Av|y|,6Av|y|) по каналах кутів а і р, детектори, фільтри, формувачі імпульсів, введені опорний сигнал з частотою Av|y передавального лазера, " l y e " - тригери, схеми "і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот, введені вимірювальна інформація від каналу кутових швидкостей для уточнення похибки збігу по кутах каналів, підсилювачі сигналу похибки, виконавчі механізми ВІДПОВІДНИХ кутів а і р та електронно-цифрові обчислювальні машини для відображення вимірювальної інформації по каналах кутів а і р неоперативність супроводження та недостатня ю КІЛЬКІСТЬ ВПР КА Найбільш близьким до запропонованого технічним рішенням, обраним як прототип є „Система автоматичного супроводження ЛА за напрямком на багатомодових лазерах" [2], яка вміщує послідовно з'єднанні лазер з блоком лазерної накачки, селектор подовжніх мод, передаючу оптику, а для приймання сигналу - прийомну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння, пристрій сигналу похибки, виконавчій пристрій та додатково може бути доповнена канали вимірювання похилої дальності R і радіальної швидкості R' Система може забезпечити автосупроводження ЛА за напрямком при одночасному вимірюванні R, R' та кутів азимута і міста Робота системи-прототипу полягає в наступному Коли ЛА знаходиться на напрямку оптичної осі, амплітуди сигналів різниці частот, виділених фотодетектором та резонансними підсилювачами, будуть однакові У випадку, коли ЛА зміщується ю 59115 відносно оптичної осі, різниця амплітуд сигналів різностних частот на виході фільтрів будуть майже пропорційна відхиленню Виходи фільтрів своїх кутових каналів з'єднані зі входами схем порівняння амплітуд діаграм спрямованості (ДС) азимутального і кутового каналів Виділені сигнали похибки цих каналів після їх підсилювання поступають на виконавчі пристрої, які розвертають прийомопередаючу платформу таким чином, щоб ЛА знаходився на оптичній осі системи В каналі вимірювання R використовується фазовий метод Боротьба з неоднозначністю вимірювань здійснюється завдяки використанню багатошкального методу В каналі вимірювання R' використовується метод вимірювання на під несучих позависоких частот Принцип дії каналу складається у тому, що основна частина зондуючого випромінювання лазера через антенну систему направляється в напрямку на ЛА, а маленька частина відводиться у бік фотоприймача опорного сигналу, де здійснюється виділення сигналу з частотою міжмодових биттів Кожна мода випромінювання, відбиваясь від катафоту ЛА, виміряє свою частоту на величину допплерівського зрушення, пропорційну швидкості ЛА Недоліком системи-прототипу є те, що вона не вимірює кутову швидкість ЛА, не використовує цю інформацію для підвищення СТІЙКОСТІ (астатизму) каналу АСН та не використовує низькочастотну фільтрацію приймаємих сигналів в каналі АСН При наявності шумових фотонів та флуктуаційних шумів в каналі АСН актуальною є задача оптимальної фільтрації слабих сигналів з великої дальності, що в прототипі немає В основу винаходу поставлена задача створити канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого ЧЧМ вимірювання, який завдяки використанню вимірювальної інформації від каналу кутових швидкостей та оптимальної низькочастотної фільтрації сигналів міжмодових биттів дозволить здійснювати точне і стійке кутове автосупроводження ЛА при одночасному вимірі кутів а і р у широкому діапазоні дальностей, починаючи з початкового моменту польоту ЛА [3] Поставлена задача вирішується за рахунок того, що у відому систему-прототип [2], з метою додаткового використання вимірювальної інформації від каналу кутових швидкостей та підвищення СТІЙКОСТІ кутового автосупроводження і точності вимірювання кутів азимута і міста ЛА, додатково після СПМ послідовно введено блок дефлекторів, керування яким здійснюється введеними блоком керування дефлекторами та керуючим елементом, після фотодетектору послідовно введено широкосмуговий підсилювач, а замість СП для отримання інформації о кутах азимута а і міста Р та величини і знака кута відхилення ЛА від РСН послідовно введено резонансні підсилювачі настроєні на ВІДПОВІДНІ частоти міжмодових биттів (AvH, 2AvH, 3AvH, 6AvH) no каналах кутів а і p, детектори, фільтри, формувачі імпульсів, а - введення опорного сигналу з частотою AvH передаючого лазера, „1"|„0" тригери, схеми „і", лінії затримки, лічильники, цифро-аналогові перетворювачі, фільтри нижніх частот з введенням б - вимірювальної інформації від каналу кутових швидкостей для уточнення похибки збігу по кутам каналів, підсилювачі сигналу похибки, виконавчі механізми ВІДПОВІДНИХ кутів а і р та електронно-цифрові обчислювальні машини для відображення вимірювальної інформації по каналах кутів а і р Побудова каналу АСН пов'язана з використанням модернізованого ЧЧМ вимірювання, перш за все, вимірювальної інформації по кутах та кутових швидкостях ЛА, які дозволяють підвисити астатизм каналу АСН при оптимальній вузькосмугової фільтрації сигналу кутової похибки за критерієм мінімумом дисперсії похибки фільтрації [3] Пропонуємий канал АСН може бути доповнений вимірювальними каналами похилої дальності R, радіальної швидкості R' та кутових швидкостей а' і р' (тангенціальної швидкості) Суть модернізованого ЧЧМ вимірів, полягає в тому, що із синхронізованого спектра випромінювання одномодового багаточастотного лазера за допомогою селектора подовжніх мод виділяються необхідні пари частот для „підфарбування" ДС, щоб створити РСН у виді 4-х частково перетинаючихся парціальних ДС ("підфарбованих" різницевими частотами міжмодових биттів), які на відміну прототипу тепер попарно зустрічне сканують у кожній із двох ортогональних площин [3], завдяки використання блока дефлекторів Зустрічне сканування пар парціальних ДС у кожній із двох ортогональних площин приводить до зрушення огинаючих періодів пачок імпульсів частот міжмодових биттів за один повний прохід ДС у прямому і зворотному напрямку сканування Це зрушення дає похибки супроводження по кутам [3], а різниця в тривалості огинаючих - дає похибки кутових швидкостей Високоточні вимірювання кутів азимуту і міста ЛА можливі завдяки формуванню стабільних ДС Інтерференційні провали згладжуються при обробці сигналів Оскільки СТІЙКІСТЬ автосупроводження та точність вимірів кутів азимуту і міста ЛА визначається як крутістю огинаючих незалежно від методів вимірів різниці зрушення періодів і їх різностей, так і шириною смуги фільтру, то використовується вузькосмугова фільтрація сигналу як на різницевих частотах міжмодових биттів, так і оптимальна фільтрація на нижчих частотах [4], що формують огинаючу Реалізація стійкого автосупроводження та високої точності вимірювання кутів азимуту і міста ЛА не можлива без прецизійної антенно-поворотної системи Модернізований ЧЧМ вимірів припускає обробку результатів вимірів у цифровій формі Тому пропонується створити адаптивний пакет обробки інформації, цифрові астатичні адаптивні фільтри і засоби узгодження протоколів Технічний результат, який може бути отриманий при здійсненні винаходу полягає в підвищенні СТІЙКОСТІ кутового автосупроводження ЛА при одночасному високоточному вимірі кутів а і р у широкому діапазоні дальностей починаючи з початкового моменту польоту ЛА при понадвузьких ДС, завдяки використання вимірювальної інформації від каналу кутових швидкостей та вузькосмугової фільтрації Такий канал може бути доповнений каналами вимірювання похилої дальності R, радіальної 59115 швидкості R' та кутових швидкостей а' і р' розподіляються по резонансних підсилювачах, На фіг 1 приведена узагальнена структурна побудованим на ВІДПОВІДНІ частоти AvH, 2AvH, схема запропонованого каналу автоматичного 3AvH, 6AvH При цьому імпульсні сигнали радіочассупроводження літальних апаратів за напрямком тоти, що надходять з РП1 і РП2 (РПДун і РП2Дун) на підставі модернізованого частотно-часового формують сигнал похибки по куту а, а РПЗ і РП4 методу вимірювання (РПЗДУМ і РПбДУм) - по куту р На фіг 2 приведені епюри напруг з виходів Формування сигналу похибки по куту а, поляблоків пропонуємого каналу АСН гає в наступному Введення імпульсного сигналу На фіг 3 приведені епюри напруг з виходів (а) з опорного каналу AvH, перетвореного формублоків пропонуємого каналу АСН, які визначають вачем імпульсів (ФІ 1) у "пачки" опорних імпульсів полярність знака відхилення ЛА від РСН на частоті AvHOn, надходить на схему "Й" ВиділеЗапропонований канал автоматичного супроний і посилений імпульсний сигнал з РПДун частоводження літальних апаратів за напрямком на ти міжмодових б и т в AvH (фіг 2 і 3), детектується підставі модернізованого частотно-часового методетектором, у виді огинаючей сигналу, що змінюду включає КЕ - керуючий елемент, БКД - блок ється за законом руху ДС лазера і, після прохокерування дефлекторами, Лн - лазер з накачкою, дження фільтру, перетворюється в ФІ 2 у крапках СПМ - селектор подовжніх мод, БД - блок дефлекпереходів періодів сканування в імпульси (один торів, ПРДО - передаюча оптика, ПРМО - приймаімпульс за період сканування), надходить на триюча оптика, ФТД - фотодетектор, ШП - широкосмугер "1", перекидаючи його У цей же час, виділений говий підсилювач, РП - резонансні підсилювачі і посилений РП2Дун імпульсний сигнал частоти настроєні на ВІДПОВІДНІ частоти міжмодових б и т в , міжмодових биттів 2AvH детектується, виділяючи Дет - детектори, Ф - фільтри, ФІ - формувачі імпуогинаючу сигналу, що змінюється по такому ж зальсів, „1"|„0" - тригери, "І" - схеми "і", ЛЗ - лінії закону і, проходячи через фільтр, перетворюється у тримки, Лч - лічильники, ЦАП - цифро-аналогові ФІ 2 у крапках переходів періодів коливань в імпуперетворювачі, ФНЧ - фільтри нижніх частот, ПСП льси (один імпульс за період сканування), надхо- підсилювачі (фільтри) сигналу похибки, ВМ - видить на тригер "0", установлюючи його у вихідний конуючі механізми, ЕЦОМ - електронно-цифрові стан обчислювальні машини та а - введення опорного Задача виміру тимчасового інтервалу в схемі сигналу з частотою AvH від передаючого лазера, б "І" із заданою точністю, полягає у встановленні - введення сигналу від каналу оцінки тангенціалькритерію початку і кінця відліку тимчасового інтерної складової швидкості (кутових швидкостей) ЛА валу по визначених характеристиках значення для уточнення похибки збігу по кутам імпульсних сигналів, що надходять на входи схеми У запропонованому каналі автоматичного су"І" У зв'язку з тим, що, як правило, передній фронт проводження літальних апаратів за напрямком на імпульсу досить малий у порівнянні з дозволом, підставі модернізованого частотно-часового метощо вимагається, за часом, пропонується як харакду вимірювання всі блоки виконано по відомим терні значення сигналу, що визначають начало і схемам [2, 3] кінець відліку тимчасового інтервалу використовуРобота запропонованого каналу автоматичновати деяке граничне значення U n (порогове знаго супроводження літальних апаратів за напрямчення напруги) (фігЗ) ком на підставі модернізованого частотноТаким чином, завдяки періодичному за цикл часового методу вимірювання полягає в наступсканування відкриттю і закриттю тригером схеми ному "І", регулюється проходження імпульсів у схемі "І" Зі синхронізованого одномодового багаточасвід ФІ 1, тобто відбувається виділення "пачок" імтотного спектра випромінювання YAG Nd 3+ - лапульсів, число яких пропорційно куту відхилення зера (Лн) за допомогою СПМ виділяються необЛА від РСН (фігЗ) Підраховані лічильником імпухідні пари частот для створення РСН завдяки фольси, перетворяться цифро-аналоговим перетвормуванню сумарної ДС у виді 4-х частково рювачем в аналоговий сигнал похибки з необхідперетинаючихся парціальних ДС («підфарбованим знаком, що змішується у ФНЧ з імпульсним них» різницевими частотами міжмодових б и т в сигналом від каналу кутових швидкостей ЛА (б) (AvH, 2AV H , 3AV H , 6AV H ), ЩО попарно зустрічне сканують у кожній із двох ортогональних площин блодля формування зваженої оцінки по кутах (уточком дефлекторів При цьому період сканування нення похибки збігу по кутах) Завдяки обліку визадається блоком керування дефлекторів, який мірювальної інформації від каналу кутових швидразом з Лн забезпечується необхідним живленням костей (б) у ФНЧ усуваються динамічна і флуктуавід керуючого елемента Проходячи через переційна похибки фільтрації [4] Відфільтрований у даючу оптику, лазерний імпульсний сигнал фокуФНЧ і посилений підсилювачем сигналу похибки, сується в скануєми крапки простору, оскільки здійотриманий сигнал відпрацьовується за допомогою снюється зустрічне сканування двома парами ДС у виконавчого механізму кожній із двох ортогональних площин (а і р чи X і Надходить від ПСП на вхід електронноцифрової обчислювальної машини сигнал виділяУ) ється в ній у вигляді числа, пропорційного вимірюПрийняті прийомною оптикою відбиті від ЛА в ваному куту азимута а процесі сканування чотирьох ДС лазерні імпульсні Якщо ЛА знаходиться вищче РСН, то на схему сигнали і огинаючи сигнали ДС за допомогою фо"І" першим надходить імпульс з ФІ 2 міжмодової тодетектора перетворяться в електричні імпульсні частоти AvH, а на тригер надходить другим імпульс сигнали на різницевих частотах міжмодових битз ФІ 2 міжмодової частоти 2AvH (фіг 1 і 3) На схетів, посилювані широкосмуговим підсилювачем, і 8 59115 му "І" від тригера подається строб, тривалість якого пропорційна відхиленню ЛА від РСН Цей часовий інтервал виміряється методом рахунка імпульсів частоти міжмодових биттів AvH Оскільки тривалість строба залежить лише від величини відхилення ЛА від РСН (а не від сторони відхилення), то розроблена схема визначення полярності сигналу похибки ("+" чи "-") Таким чином, якщо ЛА буде розташований нижче РСН, то першим надійде імпульс від ФІ 2 з каналу 2AvH, а другим - з каналу AvH Схема визначення знака, чи сторони відхилення ЛА від РСН працює таким способом (фіг 1 і За,б) Якщо ЛА знаходиться вище РСН, то імпульс 1 (фіг 1 і За) від каналу AvH випереджає імпульс 2 каналу 2AvH Оскільки строб від тригера затримується на час, що перевищує тривалість імпульсу 1 (чи 2), то схема збігів "І" не спрацює, тому що імпульс 1 не збіжиться в часі з данным стробом Знак сигналу похибки по куту а залишається позитивним Якщо ЛА знаходиться нижче РСН (фіг 36), то імпульс 1 відстає від імпульсу 2, тому він збігається в часі зі стробом Схема "І" спрацьовує і змінює знак (чи полярність) напруги сигналу похибки по куту а Імпульс зі схеми "І" подається на знаковий розряд лічильника імпульсів з частотою AvH Число імпульсів у лічильнику пропорційно куту відхилення а від РСН Формування сигналу похибки по куту р, відбувається аналогічним образом Виконавчі механіз ми ВМа і ВМр, розвертають прийомопередаючу платформу таким чином, щоб ЛА знаходився на РСН каналу АСН, тобто на РСН чотирьох парціальних ДС Вимір кутів а і р відбувається в ЕЦОМ ДЖЕРЕЛА ІНФОРМАЦІЇ 1 С В Тюрін, 1С Шосько, В А Романюк, В В Пономарьов, Р В Павлович ПОЛІГОННІ лазерні та оптико-електронні вимірювальні засоби Конспект лекцій Частинам -X ХВУ -1998р -174с 2 Рондин Ю П , Коломийцев А В Система автоматического сопровождения объекта по направлению на многомодовых лазерах //Информационные системы Вып - 1(5) - X НАНУ, ПАНИ, ХВУ -1997 -С 35-39 3 Альошин Г В , Рондш Ю П , Коломійцев О В Принцип підвищення СТІЙКОСТІ кутового автосупроводження літальних апаратів у лазерних вимірювальних системах //Радіотехніка та оптоелектроніка 36 Наук, праць Вип 7(37) - X ХВУ - 2001 С 79 - 80 4 Коростелев АА Пространственновременная теория радиосистем Учеб пособие для ВУЗов - М Радио и связь - 1987 - С 230 235 5 Коломийцев А В Измерение тангенциальной составляющей скорости движения объекта //Системи обробки інформації Вип 1(5) - X НАНУ, ПАНИ, ХВУ -1999 - С 162 -166 Фіг. 1, 59115 10 ФІ2 • РП1 строб ФІ2 сгреб «1» t АХ 'Лаз. система Фіг. 2. Комп'ютерна верстка Н Лисенко Фіг. 4 Підписано до друку 05 09 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for automatically tracking aircrafts by direction, using improved method for measuring frequency and time parameters
Автори англійськоюAlioshyn Hennadii Vasyliovych, Kolomiitsev Oleksii Volodymyrovych, Pashkov Dmytro Pavlovych
Назва патенту російськоюСистема автоматического сопровождения летательных аппаратов по направлению с использованием усовершенствованного метода измерения частотных и временных параметров
Автори російськоюАлешин Геннадий Васильевич, Коломийцев Алексей Владимирович, Пашков Дмитрий Павлович
МПК / Мітки
МПК: G01S 17/42, G01S 17/66
Мітки: супроводження, підставі, модернізованого, автоматичного, літальних, методу, вимірювання, частотно-часового, апаратів, канал, напрямком
Код посилання
<a href="https://ua.patents.su/5-59115-kanal-avtomatichnogo-suprovodzhennya-litalnikh-aparativ-za-napryamkom-na-pidstavi-modernizovanogo-chastotno-chasovogo-metodu-vimiryuvannya.html" target="_blank" rel="follow" title="База патентів України">Канал автоматичного супроводження літальних апаратів за напрямком на підставі модернізованого частотно-часового методу вимірювання</a>
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового метода вимірювання
Номер патенту: 58392
Опубліковано: 15.07.2003
Автори: Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Пашков Дмитро Павлович
МПК: G01S 17/66, G01S 17/42
Мітки: система, високоточна, частотно-часового, модернізованого, шестипараметрична, лазерна, метода, вимірювання, основі
Формула / Реферат:
Високоточна лазерна шестипараметрична система на основі модернізованого частотно-часового методу вимірювання, що містить послідовно включені лазер з накачкою, селектор подовжніх мод (СПМ), передавальну оптику, приймальну оптику, фотодетектор, резонансні підсилювачі, схеми порівняння амплітуд (СП), фільтри (підсилювачі) сигналів похибок та виконавчі пристрої керування кутами азимуту і місця, яка відрізняється тим, що додатково після СПМ...
Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів з перешкодами
Номер патенту: 50101
Опубліковано: 15.10.2002
Автор: Лялько Віктор Григорович
МПК: B64C 19/00, G01C 21/00
Мітки: літальних, перешкодами, апаратів, запобігання, спосіб, автоматичного, зіткненню, комбінований
Формула / Реферат:
1 .Комбінований спосіб автоматичного запобігання зіткненню літальних апаратів (ЛА) з перешкодами на висотах польоту Нс = Нвд + 400 м і нижче, де: Нс - висота стабілізації ЛА на термін зміни режиму управління; Hвд - висота, обчислена бортовою цифровою обчислювальною машиною (БЦОМ), висота відносна мінімально допустима в момент початку вертикального маневру по запобіганню зіткненню з наземною перешкодою; 400 м - запас висоти на термін...
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів
Номер патенту: 56943
Опубліковано: 15.05.2003
Автори: Пашков Дмитро Павлович, Альошин Геннадій Васильович, Коломійцев Олексій Володимирович
МПК: H03G 5/00
Мітки: літальних, підвищення, нижніх, частот, апаратів, стійкості, кутового, автосупроводження, фільтр, точності
Формула / Реферат:
Фільтр нижніх частот для підвищення стійкості і точності кутового автосупроводження літальних апаратів, що включає блоки віднімання, додавання, множення і інтегрування, який відрізняється тим, що на вході фільтра встановлений блок віднімання з вхідним зв'язком С введення значення прогнозованої динамічної похибки на підставі інформації з каналу кутової швидкості, а між виходом блока додавання та входом блока інтегрування послідовно включений...
Спосіб визначення напружень у трубопроводах на підставі вимірювання коерцитивної сили
Номер патенту: 40064
Опубліковано: 16.07.2001
Автор: Ігумєнцев Євген Олександрович
МПК: G01L 1/00
Мітки: підставі, напружень, визначення, сили, спосіб, коерцитивної, вимірювання, трубопроводах
Формула / Реферат:
Спосіб визначення напружень в трубопроводах на підставі вимірювання коерцитивної сили, який полягає в тому, що для вимірювання напружень у виробі обирають величину коерцитивної сили Нс пов'язану з пластичною деформацією в розвантаженому стані виробу для зменшення впливу умов випробувань на магнітні властивості та залишкову деформацію і за результатами контролю величини коерцитивної сили прогнозують залишковий ресурс виробу, який відрізняється...
Приймач статичного тиску для гіперзвукових літальних апаратів
Номер патенту: 53670
Опубліковано: 17.02.2003
Автори: Єрмоленко Євгенія Олександрівна, Лепескин Ігор Борисович, Кулігін Анатолій Михайлович, Гладка Інна Володимирівна, Голубков Геннадій Михайлович
МПК: G01L 19/00
Мітки: літальних, гіперзвукових, апаратів, приймач, статичного, тиску
Формула / Реферат:
Приймач статичного тиску гіперзвукового літального апарата, що включає стержень з приймальними отворами на його бічній поверхні, внутрішній прохідний тракт, що сполучається з чутливим елементом, який відрізняється тим, що у внутрішньому тракті приймача перед чутливим елементом вставлено теплообмінник з матеріалу з високою теплопровідністю, наприклад міді, виконаний у вигляді коаксіальних циліндрів, змочувані поверхні яких відполіровані ,...
Попередній патент: Спосіб лікування пародонтиту
Наступний патент: Пристрій для виготовлення розгорток картонних паковань
Випадковий патент: Пристрій акумуляції теплової енергії