Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора
Формула / Реферат
Способ измерения радиальной скорости цели для секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, отличающийся тем, что выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала, смешивают принятые эхо-сигналы цели с зондирующим сигналом передатчика с помощью диода с квадратичной вольт-амперной характеристикой, отфильтровывают допплеровский спектр смешанных сигналов с помощью фильтра нижних частот и измеряют период следования видеоимпульсов отфильтрованного допплеровского несинусоидального сигнала, а радиальную скорость цели определяют по соотношению
где - радиальная скорость цели;
- скорость света;
- период следования зондирующих видеоимпульсов;
- период следования видеоимпульсов отфильтрованного допплеровского несинусоидального сигнала.
Текст
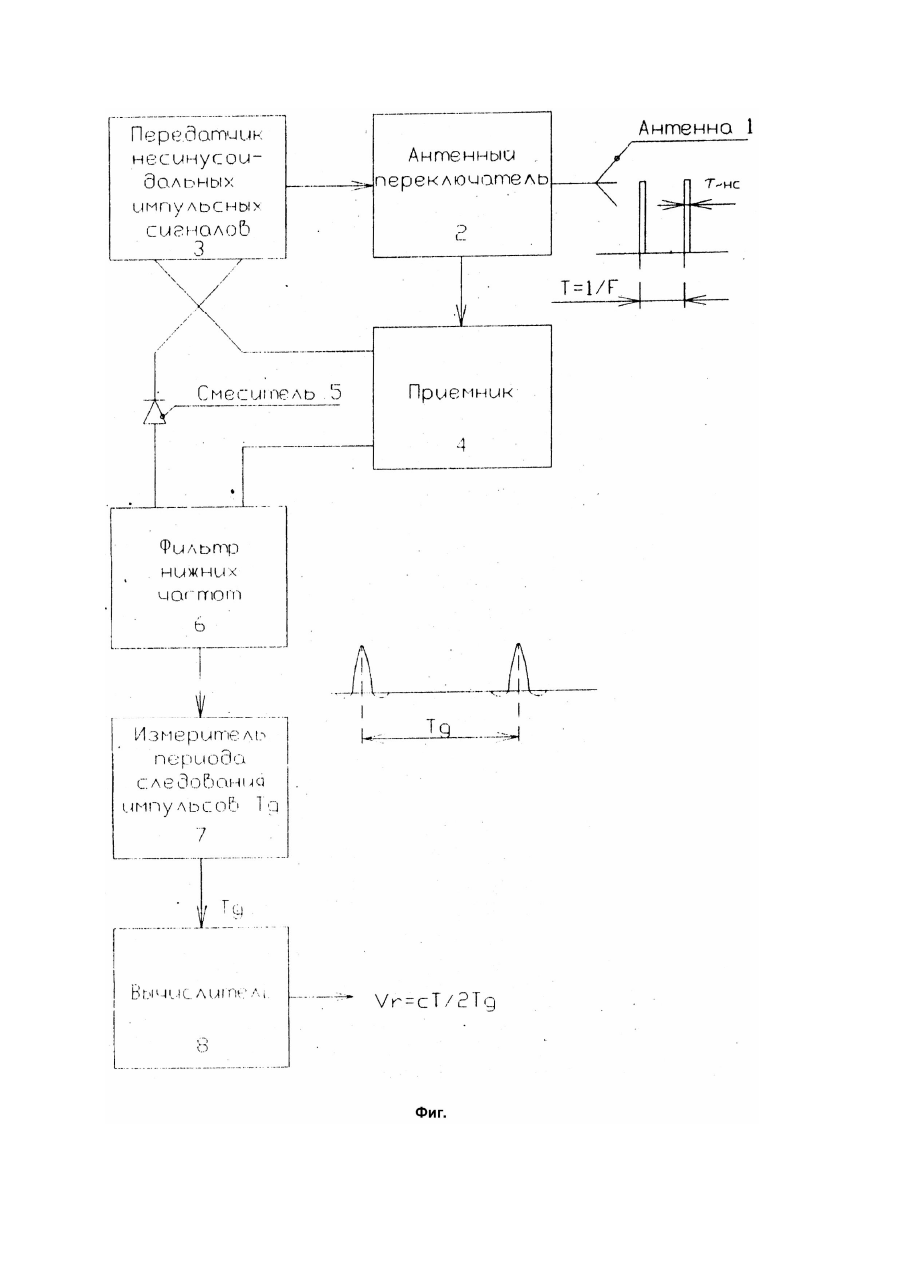
Изобретение относится к области радиолокации и может быть использовано в секвентных радиолокаторах с несинусоидальным импульсным зондирующим сигналом в виде периодической последовательности наносекундных видеоимпульсов поля радиоволн без несущей частоты для измерения радиальной скорости цели. Известен способ измерения радиальной скорости цели, используемый в радиолокаторе с непрерывным синусоидальным сигналом [1, с.396, рис. 15.1]. Способ заключается в излучении непрерывного синусоидального сигнала передающей антенной, приеме эхо-сигнала, отраженного от движущейся цели, приемной антенной, детектировании эхо-сигнала цели и прямого сигнала, попавшего в канал приема непосредственно от передатчика, и выделении допплеровской частоты с помощью узкополосного допплеровского фильтра, после чего радиальную скорость цели определяют по найденной допплеровской частоте по соотношению где - допплеровская частота, выделенная соответствующим допплеровским фильтром; длина волны излучаемого синусоидального сигнала. Для выделения допплеровской частоты используют большой набор допплеровских узкополосных фильтров с разными частотами настройки, перекрывающих возможный диапазон изменения допплеровских частот, а величину допплеровской частоты определяют по номеру фильтра, в котором выделен сигнал. Недостатком этого аналога является то, что для измерения скорости цели в широком интервале изменения этой скорости требуется большое количество узкополосных допплеровских фильтров, а при малом количестве фильтров приходится расширять их полосу пропускания, что существенно снижает точность измерения. Другой недостаток аналога состоит в том, что этот способ нельзя использовать в секвентных радиолокаторах, Это объясняется следующим. Сигнал секвентного радиолокатора имеет широкий спектр (порядка ГГц) и каждая составляющая спектра будет иметь свой разный допплеровский сдвиг частоты. В результате допплеровские частоты будут выделены почти во всех узкополосных фильтрах большого набора одновременно, что приводит к невозможности измерения скорости цели. В качестве прототипа выбран способ измерения радиальной скорости цели в секвентном радиолокаторе [2], в котором для определения допплеровского сдвига использован набор секвентных допплеровских фильтров, состоящих из усилителей •видеоимпульсов с обратной связью в виде кабельных линий задержки [2, с.22, 23, рис.1.3.1]. Способ-прототип заключается в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов поля радиоволн без несущей частоты, приеме эхо-сигналов, отраженных от движущейся цели, выделении принятого сигнала одним из секвентных допплеровских фильтров, в котором время задержки линии задержки точно равно периоду следования видеоимпульсов эхо-сигнала, и вычислении радиальной соотношению скорости цели по где - период следования зондирующих видеоимпульсов; период следования эхо-сигналов движущейся цели; - скорость света; - радиальная скорость цели (положительная при удалении цели и отрицательная при приближении). Различие периодов следования и объясняется тем, что за период следования зондирующих импульсов цель успевает пройти некоторое небольшое расстояние. Секвентный допплеровский фильтр из усилителя видеоимпульсов с обратной связью в виде линии задержки обладает избирательностью по периоду следования видеоимпульсов. В способе-прототипе используется множество таких фильтров, параллельно подключенных к выходу приемника. Линии задержки этих фильтров выполнены из отрезков коаксиального кабеля и немного отличаются подлине. При приеме эхо-сигналов от движущейся цели сигнал будет выделен и накоплен только на выходе того секвентного фильтра, у которого время задержки точно равно периоду следования видеоимпульсов эхо-сигнала цели, а этот период определяют л о номеру фильтра, на выходе которого выделен сигнал. Недостатком способа-прототипа является то, что для реализации способа требуется большое количество секвентных допплеровских фильтров и линий задержки. При низкой частоте следования зондирующих импульсов длины линий задержки окажутся очень большими (несколько км) и трудно реализуемыми. Другой недостаток прототипа состоит в том, что этот способ имеет низкую точность измерения радиальной скорости. Это объясняется тем, что период следования зондирующих видеоимпульсов очень близок к периоду следования видеоимпульсов эхо-сигнала и небольшие погрешности определения этих периодов приводят к очень большим погрешностям разности и радиальной скорости цели В основу изобретения поставлена задача усовершенствования способа измерения радиальной скорости цели для секвентного радиолокатора, в котором за счет выбора частоты следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты и дополнительного включения в состав способа операций смешивания принимаемого эхосигнала с зондирующим сигналом, отфильтровывания допплеровского спектра смешанных сигналов и измерения периода следования видеоимпульсов отфильтрованного допплеровского несинусоидального сигнала обеспечивается определение радиальной скорости цели по результату измерения этого периода следования, что повышает точность определения радиальной скорости цели и упрощает технические средства, требуемые для реализации способа. Поставленная задача решается тем, что в способе измерения радиальной скорости цели для секвентного радиолокатора, заключающемся в излучении зондирующего сигнала в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты и приеме эхо-сигналов, отраженных от движущейся цели, согласно изобретению выбирают частоту следования зондирующих видеоимпульсов значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала, смешивают принятые эхо-сигналы цели с зондирующим сигналом передатчика с помощью диода с квадратичной вольт-амперной характеристикой, отфильтровывают допплеровский спектр смешанных сигналов с помощью фильтра нижних частот и измеряют период следования видеоимпульсов отфильтрованного допплеровского несинусоидального сигнала, а радиальную скорость цели определяют по соотношению где - радиальная скорость цели; - скорость света; - период следования зондирующих видеоимпульсов; - период следования видеоимпульсов отфильтрованного допплеровского несинусоидального сигнала. Для реализации предложенного способа не требуется использования сложных секвентных допплеровских фильтров с линиями задержки. Использование в предложенном способе операций смешивания принимаемого эхо-сигнала с зондирующим сигналом, отфильтровывания допплеровского спектра смешанных сигналов и измерения периода следования видеоимпульсов отфильтрованного допплеровского сигнала и указанный выбор частоты следования зондирующих видеоимпульсов обеспечивают определение радиальной скорости цели по результату измерения этого периода следования, что повышает точность определения радиальной скорости цели, упрощает технические средства, требуемые для реализации способа, и устраняет отмеченные недостатки аналога и прототипа. Техническая сущность и принцип действия предложенного способа поясняются чертежом, где представлена упрощенная структурная схема секвентного радиолокатора для реализации этого способа, а также показаны упрощенные эпюры видеоимпульсов зондирующего сигнала и отфильтрованного допплеровского несинусоидального сигнала на выходе фильтра нижних частот. В состав секвентного радиолокатора, реализующего предложенный способ измерения радиальной скорости цели, на фиг.1 входят следующие основные элементы: - приемо-передающая антенна 1; антенный переключатель 2, закорачивающий вход приемника во время излучения зондирующих видеоимпульсов; - передатчик 3 несинусоидальных импульсных сигналов в виде периодической последовательности наносекундных видеоимпульсов без несущей частоты с периодом следования - приемник 4 в виде широкополосного усилителя наносекундных видеоимпульсов эхосигнала цели; - смеситель 5 в виде диода с квадратичной вольт-амперной характеристикой для смешивания эхо-сигнала с выхода приемника 4 и зондирующего сигнала с выхода низкого уровня передатчика 3 (эти выходы подключены к смесителю последовательно, так, чтобы полярность видеоимпульсов передатчика и приемника соответствовала полярности диода смесителя); фильтр нижних частот 6 для отфильтровывания спектра допплеровских частот сигнала; - измеритель 7 периода следования видеоимпульсов отфильтрованного допплеровского несинусоидального сигнала; - вычислитель 8 для вычисления радиальной скорости цели по соотношению (3). Схема представляет собой возможный пример технических средств для реализации предложенного способа. Физическая сущность предложенного способа поясняется следующим. Измерение радиальной скорости цели основано на использовании эффекта Допплера. Зондирующий видеоимпульсный сигнал передатчика имеет очень широкий спектр от частоты следования импульсов до верхней граничной частоты полосы пропускания антенны При отражении от движущейся цели каждая частотная составляющая этого спектра приобретает свой допплеровский сдвиг частоты где - допплеровский сдвиг частоты -ой гармоники спектра эхо-сигнала цели; - радиальная скорость цели; - номер гармоники спектра; - частота следования зондирующих видеоимпульсов; - скорость света, Предлагается выделить спектр допплеровский частот эхо-сигнала путем выполнения операций смешивания эхо-сигнала с зондирующим сигналом со второго выхода передатчика с помощью диода с квадратичной вольт-амперной характеристикой и отфильтровывания допплеровского спектра с помощью фильтра нижних частот с полосой пропускания от до где - границы измеряемого диапазона изменения возможных радиальных скоростей цели; - частота следования зондирующих видеоимпульсов; - количество гармоник спектра излучаемого периодического видеоимпульсного зондирующего сигнала; - верхняя граничная частота полосы пропускания антенны. Выделенный таким образом несинусоидальный допплеровский сигнал представляет собой периодическую последовательность допплеровских видеоимпульсов микросекундной длительности, период следования которых имеет порядок десятков мс, зависит от радиальной скорости цели и равен где - радиальная скорость цели; - период следования зондирующих видеосигналов. Предлагается измерить период следования допплеровских видеоимпульсов, отфильтрованных фильтром нижних частот, и определять радиальную скорость цели по результату измерения с помощью соотношения (3), которое получено из (5), (7). Следует отметить, что предложенный способ позволяет определить величину радиальной скорости цели но не позволяет определить направление полета цели (к радиолокатору, или от него). Такую информацию о цели следует получать из других источников, например, из анализа изменений дальности цели. Предложенное техническое решение позволит существенно повысить точность измерения радиальной скорости цели по сравнению с прототипом. Это объясняется следующим. В прототипе радиальную скорость цели определяют по изменению периода следования видеоимпульсов эхо-сигнала цели, который очень слабо зависит от радиальной скорости цели и очень мало отличается от периода следования зондирующих видеоимпульсов. Эти малые отличия очень сложно заметить и измерить и небольшие погрешности измерения могут привести к очень большим погрешностям определения радиальной скорости. В предложенном способа радиальную скорость цели определяют по измерению периода следования выделенных и отфильтрованных допплеровских видеоимпульсов. Этот период существенно зависит от радиальной скорости и изменяется в широких пределах при изменении Поэтому небольшие погрешности измерения не приведут к значительным погрешностям определения радиальной скорости. Кроме того, технические средства для реализации предложенного способа значительно проще, чем у прототипа (не используется необходимый для прототипа большой набор секвентных допплеровских фильтров с длинными линиями задержки, а требуется только один простой фильтр нижних частот без линии задержки). Для обоснования возможности реализации предложенного способа и его существенных отличительных признаков ниже приводятся необходимые математические соотношения. Зондирующий сигнал передатчика представляет периодическую последовательность видеоимпульсов наносекундной длительности с периодом следования и может быть представлен в виде следующего ряда Фурье где - коэффициент, пропорциональный амплитуде зондирующего видеоимпульса поля радиоволн; - время, отсчитываемое от середины зондирующего видеоимпульса, - период следования зондирующих видеоимпульсов; количество гармоник спектра зондирующего несинусоидального сигнала; - верхняя граничная частота полосы пропускания антенны. При отражении от движущейся цели каждая гармоника сигнала приобретает свой долплеровский сдвиг частоты, а эхо-сигнал на выходе приемника можно приближенно представить следующим соотношением где - коэффициент, пропорциональный амплитуде видеоимпульса принятого эхо-сигнала цели; - время запаздывания видеоимпульса эхосигнала относительно зондирующего видеоимпульса передатчика. При отражении от цели полярность видеоимпульса поля радиоволн изменяется на противоположную, поэтому видеоимпульсы передатчика и приемника имеют противоположную полярность (у передатчика - положительная, а у приемника - отрицательная). Зондирующий сигнал со второго выхода передатчика смешивают с эхо-сигналом цели с выхода приемника с помощью смесителя 5 на диоде с квадратичной вольт-амперной характеристикой, которая определяется следующим соотношением где - ток через диод смесителя; - входное сопротивление нагрузки смесителя (входное сопротивление фильтра нижних частот 6) и внутреннее сопротивление источника сигнала соответственно; - напряжение эхо-сигнала на выходе приемника 4; - напряжение зондирующего сигнала на втором выходе низкого уровня передатчика; коэффициент вольт-амперной характеристики диода; - прямое напряжение на диоде смесителя. При подключении напряжений к смесителю следует учесть, что видеоимпульсы этих напряжений имеют противоположную полярность. Следует их подключить к смесителю последовательно так, чтобы полярность видеоимпульсов и соответствовала полярности диода, как показано на схеме фиг.1. В этом случае смеситель 5 можно выполнить на одном диоде, который будет пропускать ток как от импульсов приемника, так и от импульсов передатчика. Напряжение на выходе смесителя равно Подставляя сюда ток найденный из квадратного уравнения (10), получим следующее выражение для напряжения на выходе смесителя Учитывая, что обычно выполняется условие можно представить квадратный корень (11) в виде ряда Тейлора и ограничиться тремя членами этого ряда, тогда для напряжения на выходе смесителя получим следующее выражение Первое и второе слагаемые в (12) будут подавлены фильтром нижних частот, так как частоты их спектра больше и не попадут в полосу пропускания фильтра. От третьего слагаемого в (12) на выход фильтра нижних частот пройдут только разностные составляющие спектра частот и напряжение на выходе фильтра будет Соотношение (13) получено путем подстановки в (12) выражений (8), (9) и отбрасывается гармоник, выходящих за полосу пропускания фильтра нижних частот 6. Выражение (13) представляет отфильтрованный фильтром 6 допплеровский несинусоидальный сигнал. Анализ этого выражения показывает, что отфильтрованный сигнал представляет периодическую последовательность видеоимпульсов микросекундной длительности с периодом следования определяемым соотношением (7). Этот период имеет порядок десятков мс, легко может быть измерен и содержит информацию о радиальной скорости цели для определения которой рекомендуется использовать соотношение (3). Отличительный признак о том, что частота следования зондирующих видеоимпульсов должна быть значительно больше максимальной допплеровской частоты на верхней частоте спектра излучаемого сигнала, принципиально необходим для обеспечения работоспособности способа, так как в противном случае гармоники спектра эхо-сигнала и зондирующего сигнала могут попасть на выход фильтра 6 и будут мешать измерениям Операции смешивания и отфильтровывания принципиально необходимы для выделения несинусоидального допплеровского сигнала и обеспечения положительного эффекта предложенного способа, Определение по соотношению (3) на основе измерения обеспечивает существенное повышение точности определения Таким образом, предложенный способ может быть практически реализован, обеспечивает достижение положительного эффекта, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации способа. В качестве примера возможной реализации предложенного способа ниже приводятся следующие расчетные параметры секвентного радиолокатора для реализации способа: - длительность зондирующего видеоимпульса 1нс; - полоса пропускания антенны 1ГГц; частота следования зондирующих видеоимпульсов 20МГц; - полоса пропускания фильтра нижних частот от 2Гц до 60кГц; - требуемый уровень внеполосного ослабления фильтра нижних частот 30дБ; - интервал измеряемых периодов следования допплеровских видеоимпульсов от 0,85мс до 500мс; - интервал измеряемых радиальных скоростей цели от 15м/с до 9км/с; - максимальная абсолютная погрешность измерения радиальной скорости ±1м/с. Операции выполнения предложенного способа осуществляются следующим образом. Излучают видеоимпульсный зондирующий сигнал в виде периодической последовательности наносекундных видеоимпульсов поля радиоволн без несущей частоты с высокой частотой следования импульсов (порядка МГц). Принимают эхо-сигналы, отраженные от движущейся цели. Смешивают эхо-сигналы с выхода приемника с зондирующим сигналом со второго выхода передатчика с помощью диода квадратичной вольт-амперной характеристикой. Отфильтровывают допплеровский спектр сигнала с выхода смесителя с помощью фильтра нижних частот. Измеряют период следования отфильтрованных допплеровских видеоимпульсов и вычисляют радиальную скорость цели no соотношению (3). Таким образом, предложенный способ может быть практически реализован, устраняет отмеченные недостатки аналога и прототипа; существенно повышает точность измерения радиальной скорости цели и упрощает технические средства, требуемые для реализации способа.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of target radial velocity with sequential radar
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюСпособ измерения радиальной скорости цели для секвентного радиолокатора
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 13/06
Мітки: цілі, вимірювання, секвентного, радіолокатора, спосіб, швидкості, радіальної
Код посилання
<a href="https://ua.patents.su/5-17468-sposib-vimiryuvannya-radialno-shvidkosti-cili-dlya-sekventnogo-radiolokatora.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання радіальної швидкості цілі для секвентного радіолокатора</a>
Вимірювач швидкості цілі для секвентного радіолокатора
Номер патенту: 17465
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, секвентного, цілі, швидкості, радіолокатора
Формула / Реферат:
Измеритель скорости цели для секвентного радиолокатора, содержащий передатчик, антенну с антенным переключателем, приемник и смеситель зондирующих и эхо-сигналов, отличающийся тем, что передатчик, антенна и приемник выполнены для несинусоидальных периодических импульсных сигналов с частотой следования импульсов F больше максимальной допплеровской частоты сигнала на верхней частоте полосы пропускания антенны, смеситель выполнен по мостовой...
Вимірювач кута місця і швидкості цілі для секвентного радіолокатора
Номер патенту: 17466
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: секвентного, вимірювач, місця, радіолокатора, швидкості, цілі, кута
Формула / Реферат:
Измеритель угла места и скорости цели для секвентного радиолокатора, содержащий приемопередающую антенну с антенным переключателем, передатчик периодических видеоимпульсов наносекундной длительности и приемник, отличающийся тем, что передатчик выполнен с частотой следования F зондирующих видеоимпульсов значительно большей максимальной допплеровской частоты на верхней частоте спектра зондирующего сигнала, на выходе приемника дополнительно...
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: радіолокатора, місця, цілі, кута, секвентного, спосіб, наземного, вимірювання
Формула / Реферат:
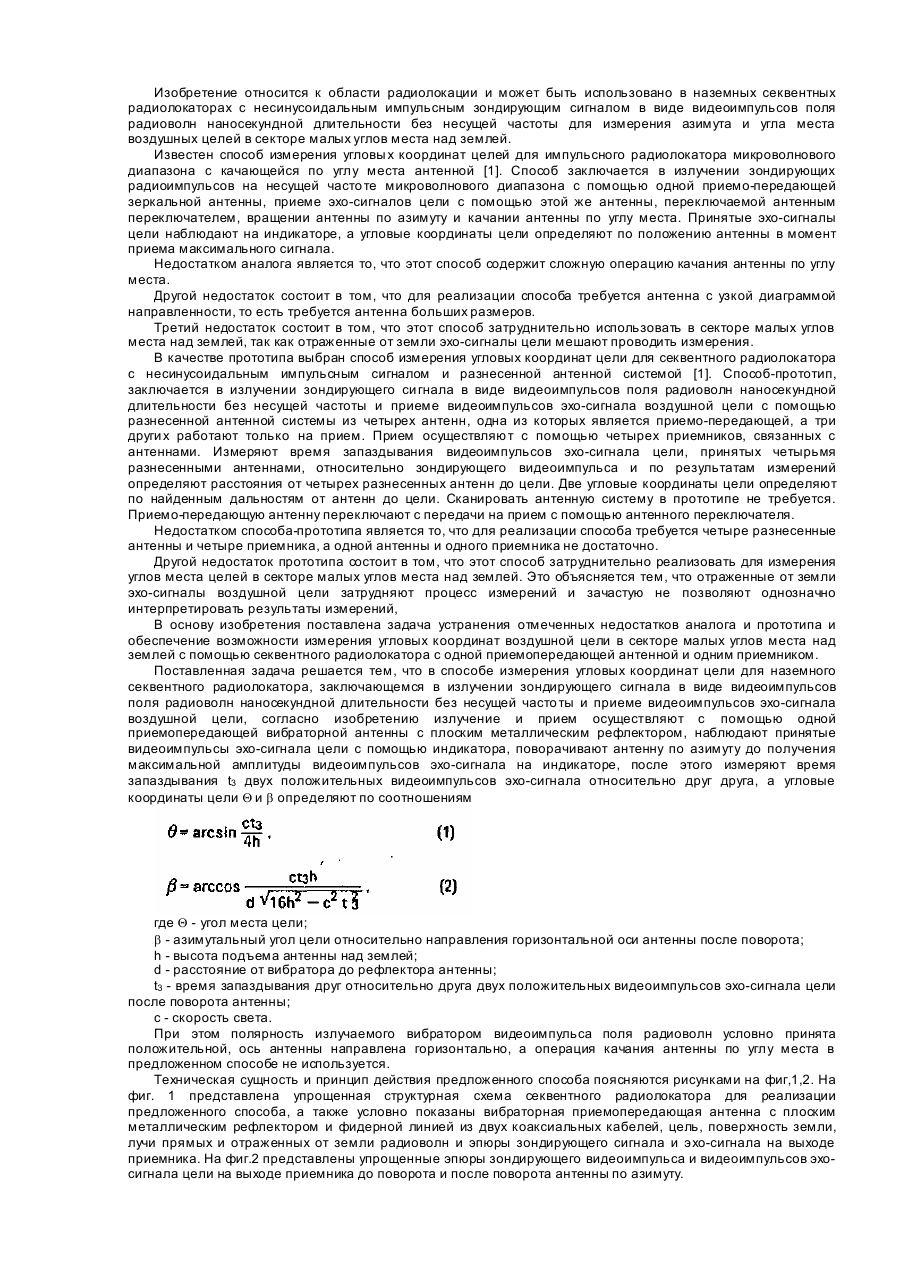
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювання, цілі, спосіб, координат, радіолокатора, секвентного, наземного, кутових
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Вимірювач кутової координати цілі для секвентного радіолокатора
Номер патенту: 17470
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, радіолокатора, координати, секвентного, кутової, цілі
Формула / Реферат:
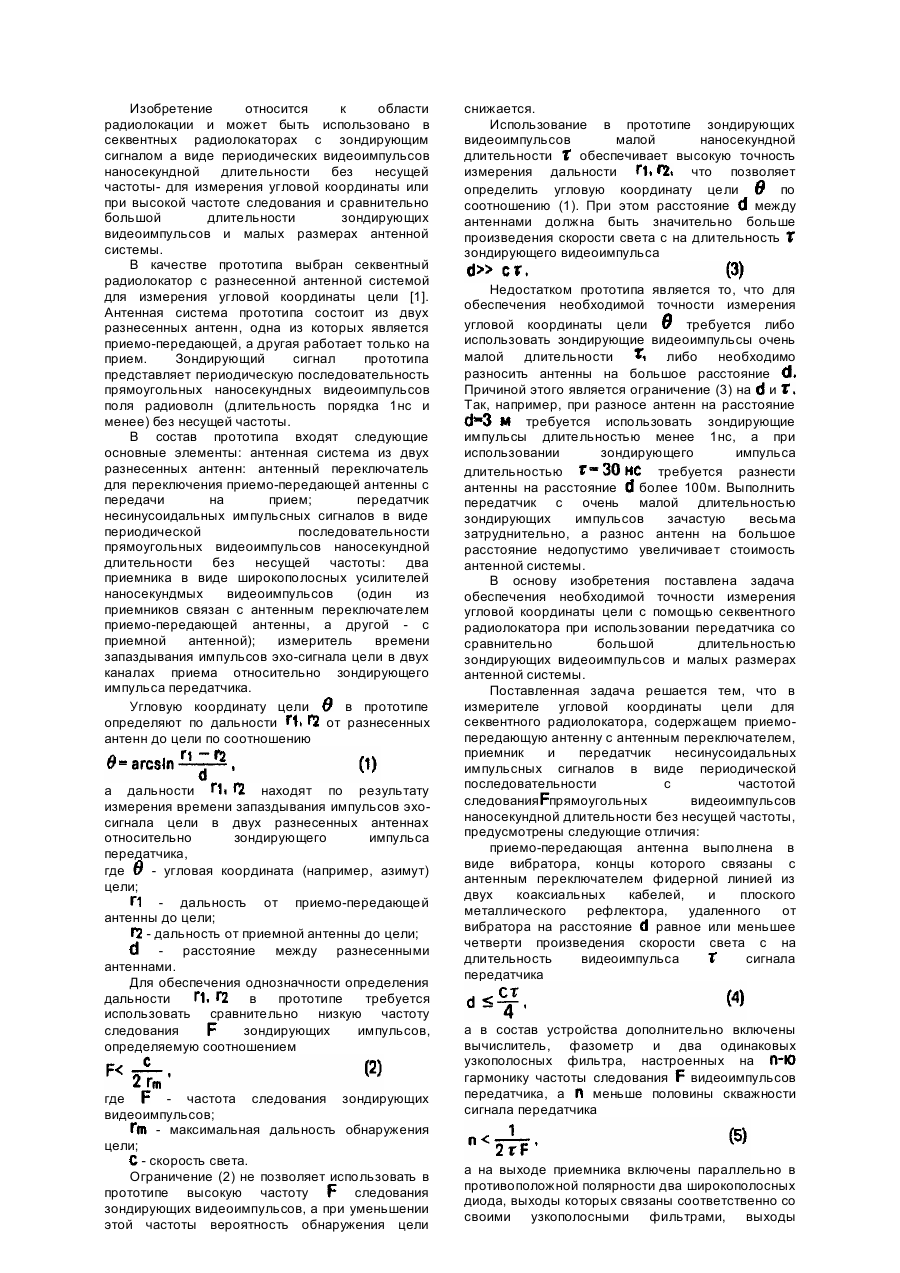
Измеритель угловой координаты цели для секвентного радиолокатора, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных импульсных сигналов в виде периодической последовательности с частотой следования прямоугольных видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что приемопередающая антенна выполнена в виде вибратора, концы которого связаны с антенным...
Попередній патент: Секвентний радіолокатор з супергетеродинним приймачем
Наступний патент: Спосіб добору закріплювачів стерильності цукрових буряків
Випадковий патент: Модель для вивчення впливу ушкодження епіфізу та наросткової зони довгих кісток кінцівки на її подальший ріст