Пристрій захисту конвеєра з приводом від перетворювача частоти
Номер патенту: 69803
Опубліковано: 10.05.2012
Автори: Іванов Ігор Павлович, Дубовик Володимир Григорович, Лебедєв Лев Миколайович


Формула / Реферат
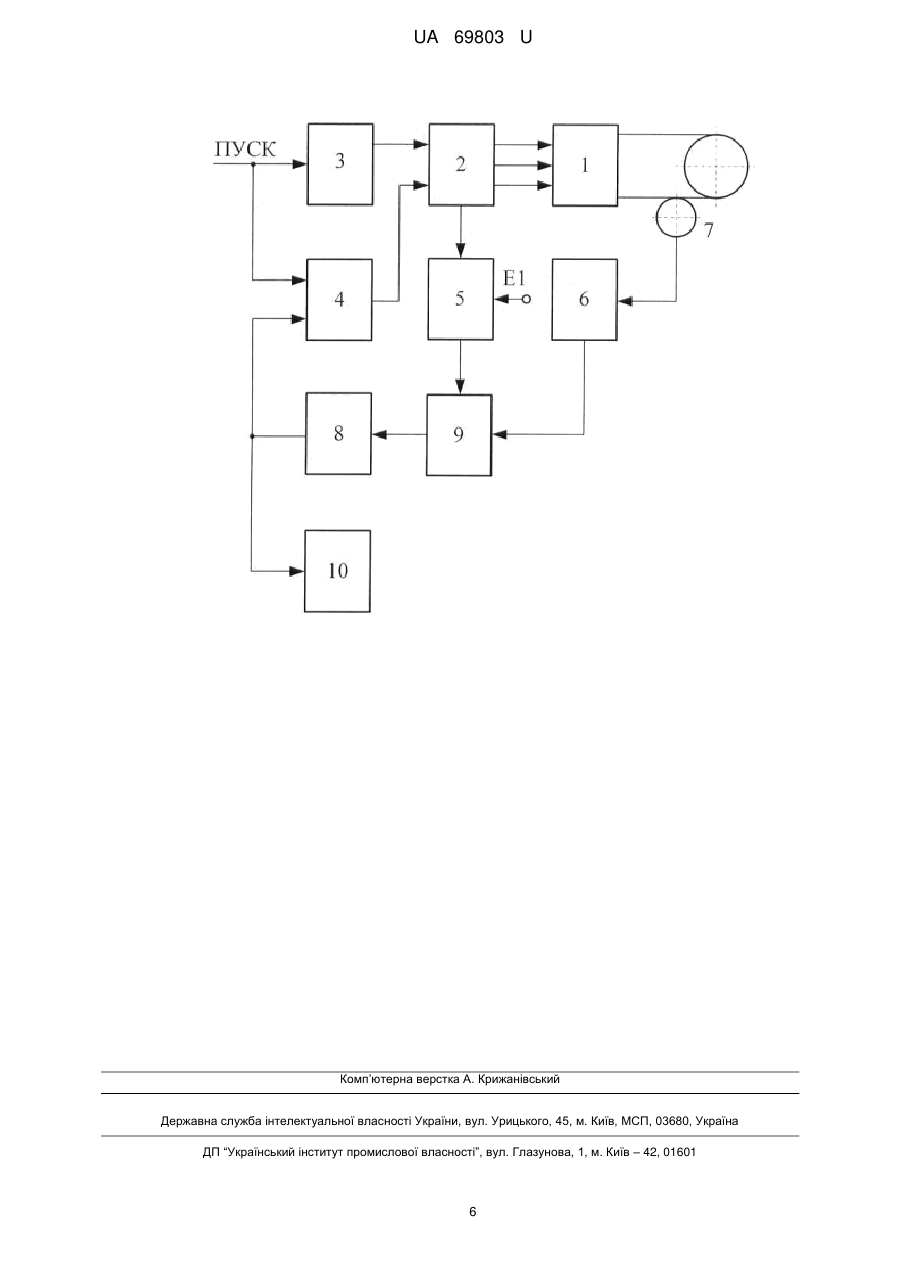
Пристрій захисту конвеєра з приводом від перетворювача частоти, що містить блок вхідний, блок вихідний, а також послідовно сполучені датчик швидкості стрічки, перетворювач, блок порівняння, який відрізняється тим, що додатково містить підсилювач зі змінним коефіцієнтом, підключений до джерела постійної вхідної дії, а також послідовно сполучені блок затримки, елемент І, перетворювач частоти з вбудованим датчиком швидкості привода, перші три виходи перетворювача частоти сполучено з приводом конвеєра, другий вхід сполучено з виходом блока вхідного, а другий вихід від вбудованого датчика швидкості привода сполучено з другим входом підсилювача зі змінним коефіцієнтом, вихід якого сполучено з другим входом блока порівняння, вихід якого сполучено з входом блока затримки, вихід якого також сполучено з блоком вихідним, другий вхід елемента І сполучено з входом блока вхідного, на які подається сигнал ПУСК.
Текст
Реферат: Пристрій захисту конвеєра з приводом від перетворювача частоти належить до конвеєрного транспорту та може бути використаний в схемах управління конвеєрами для захисту стрічки конвеєрів від прослизання з використанням регульованих приводів. UA 69803 U (12) UA 69803 U UA 69803 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до конвеєрного транспорту та може бути використана в схемах управління конвеєрами для захисту стрічки конвеєрів від прослизання з використанням регульованих приводів. Відомий пристрій контролю прослизання і швидкості УКПС. Контроль прослизання стрічки виконується шляхом циклічного вимірювання різниці кількості імпульсів від датчиків барабана і стрічки, накопичених лічильниками, у момент закінчення заповнення першого з них. Ця різниця пропорційна прослизанню стрічки щодо приводного барабана. Ємності лічильників рівні. Кількість імпульсів, накопичених лічильником до моменту прочитування результату вимірювання, постійно і дорівнює його ємності. Датчик встановлюється на стрічці конвеєра. Частота його імпульсів пропорційна швидкості стрічки. Другий датчик встановлюється на приводному барабані. Частота його імпульсів пропорційна лінійній швидкості поверхні цього барабана. За відсутності прослизання стрічки щодо приводного барабана частота імпульсів від датчиків однакова. Контроль швидкості стрічки і приводу виконується шляхом циклічного визначення ступеня заповнення лічильників сигналами від датчиків за певний час. Час заповнення лічильників встановлюється таким, щоб за відсутності зниження швидкості приводу і стрічки конвеєра вони заповнювалися на всю величину своєї ємності. Тривалість пуску конвеєра контролюється шляхом її порівняння з часом заповнення лічильника сигналом генератора, а якщо тривалість пуску перевищує задане значення, то пристроєм видається сигнал на зупинку конвеєра. Якщо номінальна швидкість стрічки досягнута своєчасно, сигналом з пристрою прослизання відлік часу лічильником припиняється [1]. Недоліком пристрою є відсутня можливість контролювати значення швидкості стрічки конвеєра при зміні заданої частоти обертання його приводного барабана для різних значень продуктивності в одному циклі роботи та низька надійність. Відомий пристрій контролю швидкості РДКС-01 стрічкових конвеєрів, що складаються з первинного перетворювача і реле швидкості. Первинний перетворювач, який встановлюється в отвори на коробі або захисному кожусі механізму, через герметичний пластиковий радіопрозорий корпус випромінює радіохвилі у напрямі контрольованого механізму у напрямі рухомої стрічки і аналізує частоту відображеного від нього сигналу. Радіосигнал, який, відбиваючись назад, несе в собі інформацію про швидкість руху конвеєра. При русі механізму формуються короткі струмові імпульси, частота яких пропорційна його швидкості. Ці імпульси надходять в реле швидкості, яке порівнює їх частоту із зразковим і пороговими значеннями, заданими при настройці. Якщо зміна швидкості не перевищує встановлений поріг, то електромагнітні реле, встановлені в реле швидкості, своїми контактами підтримують роботу механізму. Інакше з обмоток реле знімається напруга і їх контакти переходять в початковий стан і контрольований механізм відключається. Пристрій контролює рух стрічки з номінальною швидкістю від 0, 4 до 4 м/с та відключає конвеєр при критичному відхиленні його швидкості від номінальної. Поріг спрацьовування виставляється в межах від 10 до 30 % номінальної швидкості стрічки. Затримка спрацьовування (1-15 сек.) враховує час на розгін конвеєра [2]. Недоліком пристрою є відсутня можливість контролювати значення швидкості стрічки конвеєра при зміні заданої частоти обертання його приводного барабана для різних значень продуктивності в одному циклі роботи та низька надійність. Найбільш близьким до запропонованого пристрою є пристрій контролю швидкості УКС-1, який має послідовно сполучені датчик швидкості, вхідний блок, перетворювач, блок налаштування, блок порівняння, вихідний блок, другий вхід якого сполучений з виходом блока аварійного відключення, вхід якого сполучений з виходом джерела живлення, другий вхід якого сполучений з другими входами перетворювача, блока налаштування, блока порівняння, третій вхід якого через комутатор рівнів порівняння сполучений з третім виходом джерела живлення, четвертий вихід якого сполучений з третім входом вихідного блока, який забезпечує управління конвеєром [3]. Недоліком пристрою є відсутня можливість контролювати значення швидкості стрічки конвеєра при зміні заданої частоти обертання його приводного барабана для різних значень продуктивності в одному циклі роботи та низька надійність. В основу корисної моделі поставлена задача удосконалення відомих пристроїв захисту від прослизання стрічки конвеєра, шляхом введення додаткових елементів, блоків та нових функціональних зв'язків між ними та створити новий пристрій захисту конвеєра з приводом від перетворювача частоти, що дозволяє контролювати швидкість стрічки при зміні заданого значення частоти обертання приводного барабана з заданим пороговим значенням, яке також змінюється при його роботі і має просту конструкцію з використанням тільки одного електромеханічного датчика та підвищену надійність при експлуатації. 1 UA 69803 U 5 10 15 20 25 30 35 40 45 50 55 60 Вирішення поставленої задачі досягається тим, що пристрій захисту конвеєра з приводом від перетворювача частоти, що містить блок вхідний, блок вихідний, а також послідовно сполучені датчик швидкості стрічки, перетворювач, блок порівняння, який відрізняється тим, що додатково містить підсилювач зі змінним коефіцієнтом, підключений до джерела постійної вхідної дії, а також послідовно сполучені блок затримки, елемент І, перетворювач частоти з вбудованим датчиком швидкості привода, перші три виходи перетворювача частоти сполучено з приводом конвеєра, другий вхід сполучено з виходом блока вхідного, а другий вихід від вбудованого датчика швидкості привода сполучено з другим входом підсилювача зі змінним коефіцієнтом, вихід якого сполучено з другим входом блока порівняння, вихід якого сполучено з входом блока затримки, вихід якого також сполучено з блоком вихідним, другий вхід елемента І сполучено з входом блока вхідного, на які подається сигнал ПУСК. На фіг. представлена структурна схема пристрою захисту конвеєра з приводом від перетворювача частоти. Пристрій захисту конвеєра 1 з приводом, сполученим з першими трьома виходами перетворювача частоти 2 (фіг.), також складається з блока 3 вхідного, який сполучений з другим входом перетворювача частоти 2, перший вхід якого сполучено з виходом елемента І 4, а другий вихід від вбудованого датчика швидкості привода сполучено з другим входом підсилювача 5 зі змінним коефіцієнтом, перший вхід якого сполучено з джерелом Е1 постійної вхідної дії, вхід перетворювача 6 сполучено з датчиком 7 швидкості стрічки конвеєра 1, вхід блока 8 затримки сполучено з виходом блока 9 порівняння, перший вхід якого сполучено з виходом перетворювача 6, другий вхід сполучено з виходом підсилювача 5 зі змінним коефіцієнтом, вихід блока 8 затримки сполучено з входом блока 10 вихідного та першим входом елемента І 4, другий вхід якого сполучено з входом блока 3 вхідного, на які подається сигнал ПУСК. Конвеєр 1 має привід, який складається з трифазного електродвигуна та редуктора, сполученого з приводним барабаном конвеєрної стрічки. Перетворювач частоти 2 це - класичний електричний виконавчий апарат, що забезпечує обробку вхідних сигналів від блока 3 вхідного та має ланцюги живлення від мережі змінного або постійного струму, які не показані на кресл. Він також має вбудований датчик швидкості приводного електродвигуна. Вихід перетворювач частоти 2 має трифазні ланцюги для підключення привода конвеєра. Функція частотного перетворювача полягає в регулюванні числа обертів електродвигуна, що дає не тільки технологічні переваги, але і економію електроенергії на 15-20 %, також знижуються пускові струми електродвигуна і підвищується термін його служби. Перетворювач частоти 2 забезпечує регулювання швидкості обертання електродвигуна шляхом зміни його величини напруги і частоти живлення. Може бути використаний з скалярним або векторним управлінням. Коефіцієнт корисної дії перетворювача 2 складає не менше 98 %, а система управління на основі мікропроцесора забезпечує високу якість управління асинхронним електродвигуном, контролює його параметри, що дозволяє зменшити можливість виникнення і розвитку аварійних ситуацій. Дозволяє також уникнути установки додаткових датчиків швидкості, струму, напруги, частоти. Сигнал ПУСК високого логічного рівня, який подається на перший вхід перетворювача частоти 2, забезпечує його перехід в робочий режим і при цьому активізується його другий вхід. Перехід перетворювача частоти 2 в режим очікування виконується сигналом ПУСК низького логічного рівня. Блок 3 вхідний забезпечує формування часового графіка зміни швидкості конвеєрної стрічки прирозгоні, сталій роботі після подачі сигналу ПУСК в вигляді високого логічного рівня або при зупинці, коли сигнал ПУСК низького логічного рівня. Елементи для налаштування блоку 3 не показані. Підсилювач 5 зі змінним коефіцієнтом забезпечує підсилення сигналу з коефіцієнтом, який пропорційний значенню сигналу від джерела Е1 постійної вхідної дії, що забезпечує аналогове управлінням зміни коефіцієнта посилення. Для таких цілей можна використовувати активний елемент, опір якого практично лінійно змінюється при зміні напруги управління, наприклад, польовий транзистор, який при малих значеннях напруги "стік - витік" веде себе як опір, величина якого лінійно залежить від напруги на затворі. Опір переходу "стік-витік" транзистора формує сигнал негативного зворотного зв'язку по струму, від величини якого залежить коефіцієнт посилення підсилювача. Перетворювач 6 забезпечує підсилення сигналу датчика 7 швидкості, а також перетворення сигналу швидкості в сигнал вихідної напруги, пропорційний швидкості всього діапазону вимірювання. Датчик 7 швидкості забезпечує формування вихідного сигналу, пропорційного лінійній швидкості конвеєрної стрічки. Він може бути виконаний з використанням датчиків з контактними 2 UA 69803 U 5 10 15 20 25 30 35 та безконтактними методами вимірювання, наприклад, з використанням тахогенератора або датчика швидкості на ефекті Доплера. Блок 8 затримки забезпечує формування вихідного сигналу, після зміни вхідного, з затримкою до десяти або п'ятнадцяти секунд для недопущення випадкового спрацювання пристрою від перешкод. Блок 9 порівняння забезпечує формування вихідного низького логічного рівня при умові перевищення значення вхідного сигналу напруги перетворювача 6 в порівнянні з вихідним сигналом напруги підсилювача 5 зі змінним коефіцієнтом та може бути виконаний з використанням операційних підсилювачів. Блок 10 вихідний забезпечує формування звукових та світлових сигналів, а також сигналу аварійного відключення конвеєра при подачі низького логічного рівня на його вхід. Блок живлення та елементи для його підключення на кресл. не наведені. 1 Прийняті позначення Un - амплітуда сигналу на і-му виході n-го блока. Працює пристрій наступним чином. Після подачі живлення на пристрій подається також живлення на перетворювач частоти 2, апарати для його комутації не приведені, він готовий для роботи. При цьому на виходах перетворювача частоти 2 та датчика швидкості 7 сигнали дорівнюють нулю. Від перетворювача частоти 2 з другого виходу сигнал подається через підсилювача 5 зі змінним коефіцієнтом на другий вхід блока 9 порівняння, а від датчика швидкості 7 через перетворювач 6 на перший його вхід, вихідний сигнал U9 формується в відповідності до характеристики: 0, при U6 U5, то сигнал U9 на виході блока 9 порівняння буде становити логічну одиницю, яка через блок 8 затримки буде подаватися на вхід елемента І 4 та блок 10 вихідний. При цьому буде піддержуватися нормальний робочий режим пристрою. При зміні навантаження на стрічці конвеєра фактичне значення ковзання s = (n1-n2) / n1 електродвигуна збільшується і при досягненні значення sкр електродвигун привода конвеєра переходить в аварійний режим і він зупиняється. Такий режим характерний прослизанням стрічки до зупинки електродвигуна, при якому сигнал датчика 7 швидкості зменшується, на виході перетворювач 6 він також зменшується і сигнал U6 стає не пропорційним n2. При цьому U6 < U5, то сигнал U9 на виході блока 9 порівняння буде становити логічний нуль, який через блок 8 затримки буде подаватися на вхід елемента І 4, що приводить до заборони проходження сигналу ПУСК, і на першому вході перетворювача частоти 2 нульовий рівень переводить його в режим відключення електродвигуна привода конвеєра, а блок 10 вихідний забезпечує формування звукових та світлових сигналів, а також сигналу аварійного відключення конвеєра, який може передаватися в загальну систему управління. Приведений режим прослизання може виникнути при швидкості стрічки у всьому діапазоні регулювання частоти приводного електродвигуна, в якому пристрій забезпечує відключення конвеєра при виникненні такої ситуації. Прослизання стрічки може бути також при зменшенні її натягу і при цьому ковзання електродвигуна не досягає критичного значення sкр , а сигнал на виході датчика 7 швидкості зменшується і, відповідно, на виході перетворювач 6 він також зменшується, що приводить до умови U6 < U5 на входах блока 9 порівняння, а на його виході сигнал U9 буде становити логічний нуль, що приводить до відключення конвеєра, аналогічно, розглянутому раніше. При відключенні сигналу ПУСК на виході елемента І 4 встановлюється рівень логічного нуля, який переводить перетворювач частоти 2 в режим відключення електродвигуна привода конвеєра. На виході датчика 7 швидкості сигнал після зупинки конвеєра 1 зменшується до нуля, який через перетворювач 6 надходить на перший вхід блока 9 порівняння, на другому вході сигнал також дорівнює нулю, тому на його виході залишається рівень логічної одиниці, в відповідності з характеристикою, так, як U6=U5. З виходу блока 9 порівняння рівень логічної одиниці подається через блок 8 затримки на елемента І 4 та блок 10 вихідний, що не викликає змін в їх стані. Пристрій готовий до чергового пуску конвеєра. Використання перетворювача частоти дозволяє також здійснювати плавний пуск конвеєра без перевантажень електродвигуна, плавно регулювати швидкість стрічки при зміні завантаження, збільшити міжремонтні періоди механічної частини транспортера в 1,3-1,5 разу, понизити експлуатаційні витрати на обслуговування конвеєра на 30-50 %, істотно понизити споживання електроенергії електроприводом конвеєра. При зменшенні прослизання стрічки відносно значення, заданого джерелом Е1 постійної вхідної дії робота пристрою переходить в нормальний робочий режим конвеєра 1, при якому на 4 UA 69803 U 5 10 15 20 25 першому вході елемента І 4 встановлюється рівень логічної одиниці, що забезпечує проходження сигналу ПУСК на вхід перетворювача частоти 2 і робочому режиму роботи привода конвеєра 1, аналогічно розглянутому вище. Застосування введених перетворювача частоти 2, елемента 14, підсилювача 5 зі змінним коефіцієнтом, блока 8 затримки, джерела Е1 постійної вхідної дії до складу пристрою, дозволяє контролювати значення швидкості стрічки конвеєра при зміні заданої частоти обертання його приводного барабана для різних значень продуктивності в одному циклі роботи та підвищує його надійність. Це дозволяє не допустити підвищення температури стрічки конвеєра при його роботі та своєчасно його відключати при прослизанні стрічки, дозволяє також змінювати поріг спрацювання пристрою, має просту конструкцію та підвищену надійність при експлуатації, а також знижує затрати на його обслуговування. Пристрій забезпечує відключення конвеєра при технологічному перевантаженні та прослизанні конвеєрної стрічки, не залежно від заданої швидкості її переміщення. При роботі пристрою використовується джерело Е1 постійної вхідної дії, яке дозволяє просто робити його налаштування на конкретне значення відхилення швидкості стрічки відносно заданого для аварійного відключення конвеєра при її прослизанні або перевантаженні. Джерела інформації: 1. Справочник по автоматизации шахтного конвейерного транспорта / Н.И. Стадник, В.Г. Ильюшенко, СИ. Егоров и др. - К.: Техника, 1992. - с. 348-364. 2. Устройство контроля скорости РДКС-01. Паспорт. Общество с ограниченной ответственностью "Промрадар". 143517, Московская область, Истринский район, станция Холщѐвики. http:// www.promradar.ru. sensors@istra.ru. 3. Техническое описание "Устройство контроля скорости УКС.1". 000 "Измерительные приборы". 660093, Красноярский край, Красноярск, Академика Вавилова, д. 3. http://www.kip24.ru/product/2_28_l 1/ ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 Пристрій захисту конвеєра з приводом від перетворювача частоти, що містить блок вхідний, блок вихідний, а також послідовно сполучені датчик швидкості стрічки, перетворювач, блок порівняння, який відрізняється тим, що додатково містить підсилювач зі змінним коефіцієнтом, підключений до джерела постійної вхідної дії, а також послідовно сполучені блок затримки, елемент І, перетворювач частоти з вбудованим датчиком швидкості привода, перші три виходи перетворювача частоти сполучено з приводом конвеєра, другий вхід сполучено з виходом блока вхідного, а другий вихід від вбудованого датчика швидкості привода сполучено з другим входом підсилювача зі змінним коефіцієнтом, вихід якого сполучено з другим входом блока порівняння, вихід якого сполучено з входом блока затримки, вихід якого також сполучено з блоком вихідним, другий вхід елемента І сполучено з входом блока вхідного, на які подається сигнал ПУСК. 5 UA 69803 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 6
ДивитисяДодаткова інформація
Назва патенту англійськоюProtection device of conveyor driven by frequency converter
Автори англійськоюDubovyk Volodymyr Hryhorovych, Lebediev Lev Mykolaiovych, Ivanov Ihor Pavlovych
Назва патенту російськоюУстройство защиты конвейера с приводом от преобразователя частоты
Автори російськоюДубовик Владимир Григорьевич, Лебедев Лев Николаевич, Иванов Игорь Павлович
МПК / Мітки
МПК: B65G 43/04
Мітки: пристрій, захисту, частоти, конвеєра, приводом, перетворювача
Код посилання
<a href="https://ua.patents.su/8-69803-pristrijj-zakhistu-konveehra-z-privodom-vid-peretvoryuvacha-chastoti.html" target="_blank" rel="follow" title="База патентів України">Пристрій захисту конвеєра з приводом від перетворювача частоти</a>
Пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти

Номер патенту: 62510
Опубліковано: 25.08.2011
Автори: Дубовик Володимир Григорович, Лебедєв Лев Миколайович, Скуратовський Євген Олександрович
МПК: H02H 7/085
Мітки: перетворювача, пристрій, захисту, електродвигуна, асинхронного, живленням, частоти
Формула / Реферат:
Пристрій захисту асинхронного електродвигуна з живленням від перетворювача частоти, що містить блок живлення, блок датчиків струму, три джерела постійної вхідної дії, два порогові елементи, елемент І, блок незалежної витримки часу, який відрізняється тим, що додатково містить сполучені блок визначення продуктивності обдуву та датчик швидкості, який має зв'язок з електродвигуном, сполучені ключовий елемент та блок вентилятора, а також...
Пристрій захисту стрічки конвеєра від загоряння
Номер патенту: 69783
Опубліковано: 10.05.2012
Автори: Дубовик Володимир Григорович, Лебедєв Лев Миколайович, Шевчук Андрій Петрович
МПК: B65G 43/04
Мітки: захисту, стрічки, конвеєра, пристрій, загоряння
Формула / Реферат:
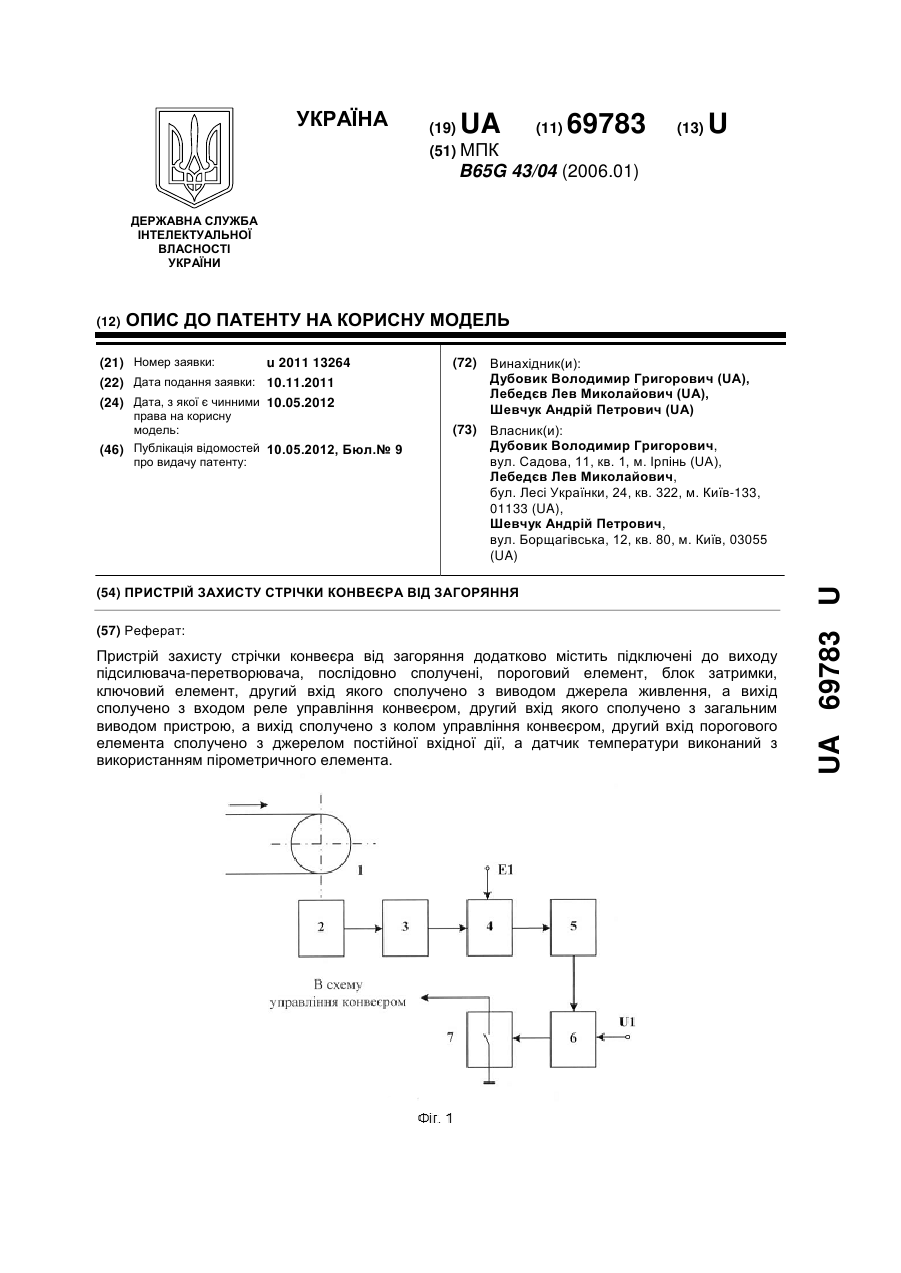
Пристрій захисту стрічки конвеєра від загоряння, що містить реле управління конвеєром, а також послідовно сполучені датчик температури, підсилювач-перетворювач, який відрізняється тим, що додатково містить підключені до виходу підсилювача-перетворювача, послідовно сполучені, пороговий елемент, блок затримки, ключовий елемент, другий вхід якого сполучено з виводом джерела живлення, а вихід сполучено з входом реле управління конвеєром, другий...
Пристрій контролю швидкості тягового органа стрічкового конвеєра

Номер патенту: 61399
Опубліковано: 25.07.2011
Автори: Стаднік Микола Іванович, Кудлай Роман Анатолійович, Полубєдов Микола Анатолійович, Пономарьов Дмитро Вячеславович, Мезніков Артур Володимирович
МПК: B65G 43/04
Мітки: пристрій, тягового, швидкості, органа, контролю, конвеєра, стрічкового
Формула / Реферат:
Пристрій контролю швидкості тягового органа стрічкового конвеєра, який містить датчик швидкості стрічки, датчик швидкості барабана, послідовно з'єднані перетворювач сигналу й модуль програмного керування з двома входами, при цьому до виходів модуля програмного керування підключений блок індикації та блок вихідних реле, вхід перетворювача сигналу з'єднаний з виходом датчика швидкості стрічки, а його вихід з'єднаний з входом модуля програмного...
Пристрій автоматичного захисту від загоряння стрічки конвеєра
Номер патенту: 38018
Опубліковано: 15.05.2001
Автори: Ільїн Євген Андрійович, Ільченко Людмила Володимирівна
МПК: B65G 43/04
Мітки: конвеєра, автоматичного, пристрій, стрічки, загоряння, захисту
Формула / Реферат:
Пристрій автоматичного захисту від загоряння стрічки конвеєра, який має датчик температури, перетворювально-підсилювальні блоки і контакти аварійного відключення конвеєра, який відрізняється тим, що чутливий елемент датчика температури стрічки є конденсатор, який складається з жорстко укріплених на станині конвеєра двох металевих смуг, розташованих із зазором так, що одна знаходиться над, а інша - під порожняковою стрічкою конвеєра,...
Спосіб екстремального стабілізуючого регулювання вихідної частоти перетворювача
Номер патенту: 25827
Опубліковано: 27.08.2007
Автори: Саратовський Руслан Миколайович, Глєбін Анатолій Георгійович
МПК: H02M 7/539
Мітки: спосіб, частоти, регулювання, перетворювача, вихідної, стабілізуючого, екстремального
Формула / Реферат:
Спосіб екстремального стабілізуючого регулювання вихідної частоти перетворювача, який полягає в тому, що формують і подають на перетворювач сигнал завдання вихідної частоти, змінюють цей сигнал в одному з напрямків, вимірюють вихідну потужність перетворювача, формують пропорційно до неї сигнал, формують коригуючий сигнал на зміну вихідної частоти, пропорційний швидкості зміни потужності, який відрізняється тим, що додатково формують штучний...
Попередній патент: Спосіб лікування хворих на компенсоване хронічне легеневе серце з використанням бра-іі кандесартану
Наступний патент: Спосіб очищення території, забрудненої промисловими стоками або нафтопродуктами
Випадковий патент: Пристрій для захисту від електромагнітного випромінювання і спосіб його виготовлення