Магнітний захоплювач
Номер патенту: 65031
Опубліковано: 25.11.2011
Автори: Садовой Олександр Валентинович, Козлов Михайло Іванович
Формула / Реферат
Магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, і додатковий корпус, що охоплює бічну поверхню основного корпусу і виконаний з можливістю вертикального переміщення відносно останнього при обмеженому переміщенні вниз і силовій взаємодії, з одного боку, з вантажем, що транспортується, а з іншого боку, з роликом кожного важеля, який відрізняється тим, що постійні магніти об'єднані в блоки з вертикальною намагніченістю, один з полюсів яких має безпосередній контакт зі стелею основного корпуса, а інший полюс кожного блоку має протилежну полярність стосовно полярності полюсів сусідніх блоків, додатковий корпус оснащений днищем з неферомагнітного матеріалу з ребрами жорсткості, виконаними у вигляді склянок з неферомагнітного матеріалу, що охоплюють магнітні блоки, під кожним з яких у днищі виконана вставка із феромагнітного матеріалу, днище охоплене плоскою рамкою з феромагнітного матеріалу, а поперечина і важелі розміщені між стінками основи, при цьому поперечина прикріплена до повзуна в самій нижній його частині, важелі розташовані безпосередньо з обох сторін від повзуна, їхні більші плечі вільно опираються на ролики, осі яких прикріплені до кінців поперечини, а механізм фіксації виконаний у вигляді електромагнітів, що мають механічно незалежні одну від іншої рухливу й нерухому частини з котушками електроживлення, причому, рухливі частини прикріплені до більших плечей важелів, а нерухомі частини прикріплені до основного корпусу.
Текст
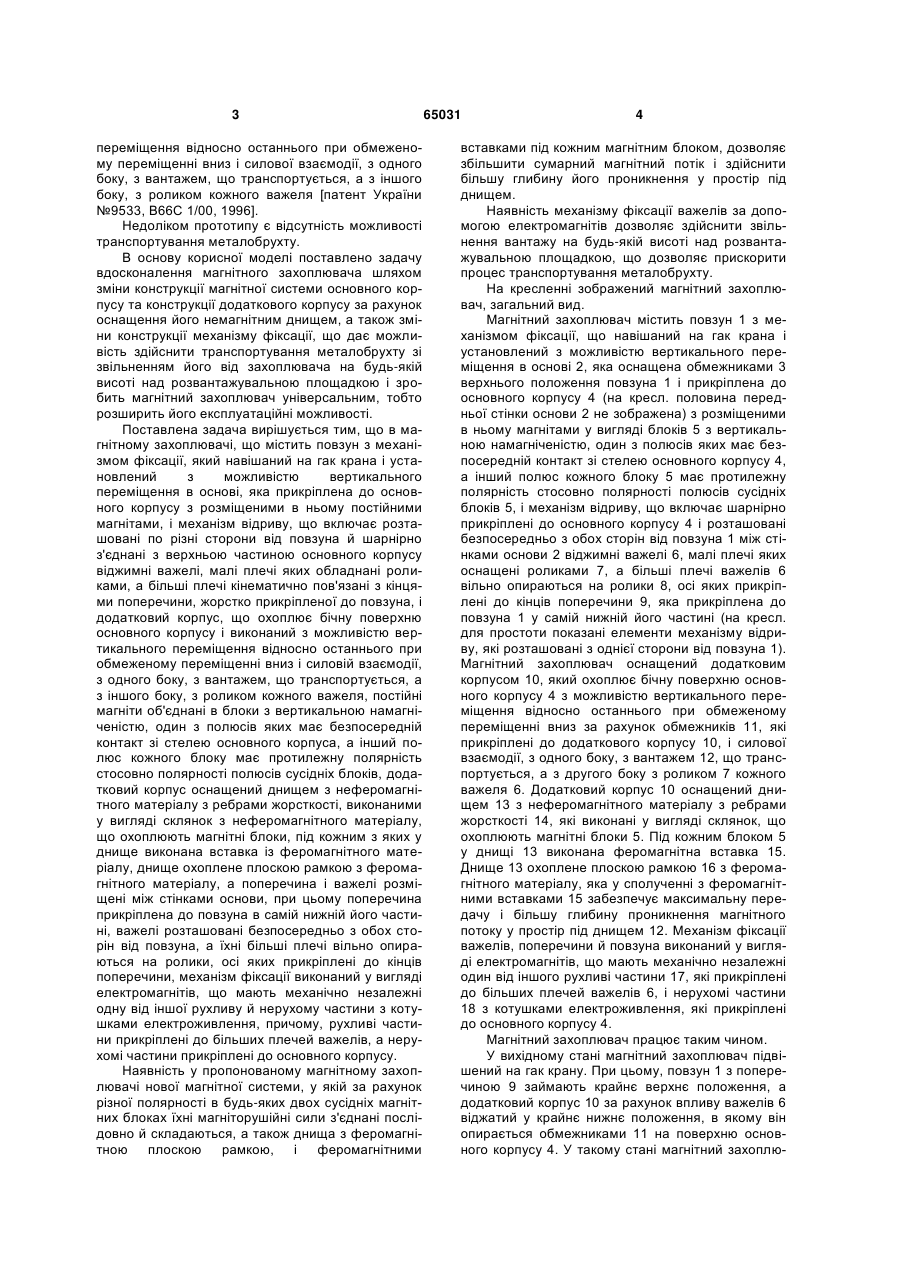
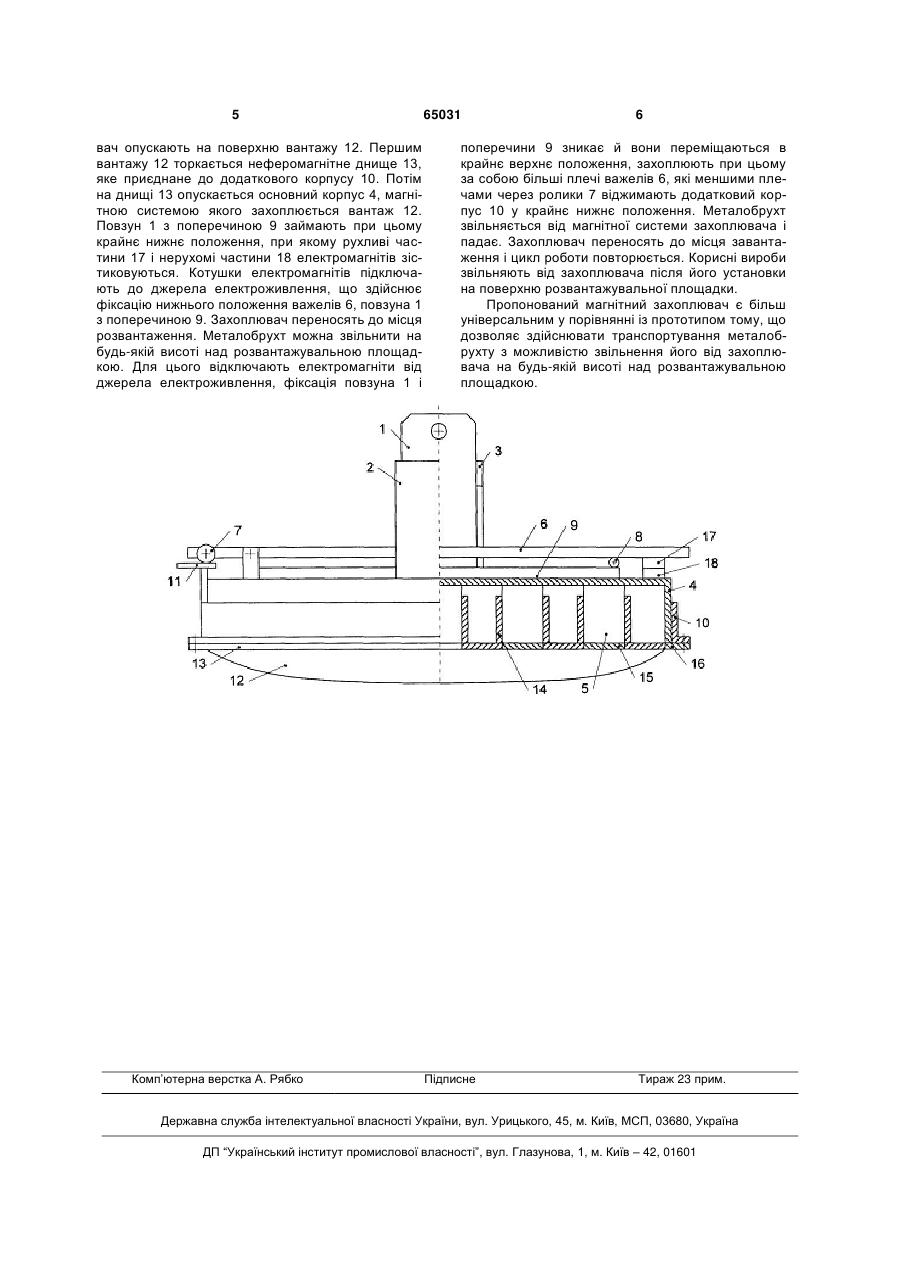
Магнітний захоплювач, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, і додатковий корпус, що охоплює бічну поверхню основного корпусу і виконаний з можливістю вертикального переміщення відносно останнього при обмеженому переміщенні вниз і силовій взаємодії, з одного боку, з вантажем, що транспортується, а з іншого боку, з роликом кожного важеля, який відрізня U 2 (19) 1 3 переміщення відносно останнього при обмеженому переміщенні вниз і силової взаємодії, з одного боку, з вантажем, що транспортується, а з іншого боку, з роликом кожного важеля [патент України №9533, В66С 1/00, 1996]. Недоліком прототипу є відсутність можливості транспортування металобрухту. В основу корисної моделі поставлено задачу вдосконалення магнітного захоплювача шляхом зміни конструкції магнітної системи основного корпусу та конструкції додаткового корпусу за рахунок оснащення його немагнітним днищем, а також зміни конструкції механізму фіксації, що дає можливість здійснити транспортування металобрухту зі звільненням його від захоплювача на будь-якій висоті над розвантажувальною площадкою і зробить магнітний захоплювач універсальним, тобто розширить його експлуатаційні можливості. Поставлена задача вирішується тим, що в магнітному захоплювачі, що містить повзун з механізмом фіксації, який навішаний на гак крана і установлений з можливістю вертикального переміщення в основі, яка прикріплена до основного корпусу з розміщеними в ньому постійними магнітами, і механізм відриву, що включає розташовані по різні сторони від повзуна й шарнірно з'єднані з верхньою частиною основного корпусу віджимні важелі, малі плечі яких обладнані роликами, а більші плечі кінематично пов'язані з кінцями поперечини, жорстко прикріпленої до повзуна, і додатковий корпус, що охоплює бічну поверхню основного корпусу і виконаний з можливістю вертикального переміщення відносно останнього при обмеженому переміщенні вниз і силовій взаємодії, з одного боку, з вантажем, що транспортується, а з іншого боку, з роликом кожного важеля, постійні магніти об'єднані в блоки з вертикальною намагніченістю, один з полюсів яких має безпосередній контакт зі стелею основного корпуса, а інший полюс кожного блоку має протилежну полярність стосовно полярності полюсів сусідніх блоків, додатковий корпус оснащений днищем з неферомагнітного матеріалу з ребрами жорсткості, виконаними у вигляді склянок з неферомагнітного матеріалу, що охоплюють магнітні блоки, під кожним з яких у днище виконана вставка із феромагнітного матеріалу, днище охоплене плоскою рамкою з феромагнітного матеріалу, а поперечина і важелі розміщені між стінками основи, при цьому поперечина прикріплена до повзуна в самій нижній його частині, важелі розташовані безпосередньо з обох сторін від повзуна, а їхні більші плечі вільно опираються на ролики, осі яких прикріплені до кінців поперечини, механізм фіксації виконаний у вигляді електромагнітів, що мають механічно незалежні одну від іншої рухливу й нерухому частини з котушками електроживлення, причому, рухливі частини прикріплені до більших плечей важелів, а нерухомі частини прикріплені до основного корпусу. Наявність у пропонованому магнітному захоплювачі нової магнітної системи, у якій за рахунок різної полярності в будь-яких двох сусідніх магнітних блоках їхні магніторушійні сили з'єднані послідовно й складаються, а також днища з феромагнітною плоскою рамкою, і феромагнітними 65031 4 вставками під кожним магнітним блоком, дозволяє збільшити сумарний магнітний потік і здійснити більшу глибину його проникнення у простір під днищем. Наявність механізму фіксації важелів за допомогою електромагнітів дозволяє здійснити звільнення вантажу на будь-якій висоті над розвантажувальною площадкою, що дозволяє прискорити процес транспортування металобрухту. На кресленні зображений магнітний захоплювач, загальний вид. Магнітний захоплювач містить повзун 1 з механізмом фіксації, що навішаний на гак крана і установлений з можливістю вертикального переміщення в основі 2, яка оснащена обмежниками 3 верхнього положення повзуна 1 і прикріплена до основного корпусу 4 (на кресл. половина передньої стінки основи 2 не зображена) з розміщеними в ньому магнітами у вигляді блоків 5 з вертикальною намагніченістю, один з полюсів яких має безпосередній контакт зі стелею основного корпусу 4, а інший полюс кожного блоку 5 має протилежну полярність стосовно полярності полюсів сусідніх блоків 5, і механізм відриву, що включає шарнірно прикріплені до основного корпусу 4 і розташовані безпосередньо з обох сторін від повзуна 1 між стінками основи 2 віджимні важелі 6, малі плечі яких оснащені роликами 7, а більші плечі важелів 6 вільно опираються на ролики 8, осі яких прикріплені до кінців поперечини 9, яка прикріплена до повзуна 1 у самій нижній його частині (на кресл. для простоти показані елементи механізму відриву, які розташовані з однієї сторони від повзуна 1). Магнітний захоплювач оснащений додатковим корпусом 10, який охоплює бічну поверхню основного корпусу 4 з можливістю вертикального переміщення відносно останнього при обмеженому переміщенні вниз за рахунок обмежників 11, які прикріплені до додаткового корпусу 10, і силової взаємодії, з одного боку, з вантажем 12, що транспортується, а з другого боку з роликом 7 кожного важеля 6. Додатковий корпус 10 оснащений днищем 13 з неферомагнітного матеріалу з ребрами жорсткості 14, які виконані у вигляді склянок, що охоплюють магнітні блоки 5. Під кожним блоком 5 у днищі 13 виконана феромагнітна вставка 15. Днище 13 охоплене плоскою рамкою 16 з феромагнітного матеріалу, яка у сполученні з феромагнітними вставками 15 забезпечує максимальну передачу і більшу глибину проникнення магнітного потоку у простір під днищем 12. Механізм фіксації важелів, поперечини й повзуна виконаний у вигляді електромагнітів, що мають механічно незалежні один від іншого рухливі частини 17, які прикріплені до більших плечей важелів 6, і нерухомі частини 18 з котушками електроживлення, які прикріплені до основного корпусу 4. Магнітний захоплювач працює таким чином. У вихідному стані магнітний захоплювач підвішений на гак крану. При цьому, повзун 1 з поперечиною 9 займають крайнє верхнє положення, а додатковий корпус 10 за рахунок впливу важелів 6 віджатий у крайнє нижнє положення, в якому він опирається обмежниками 11 на поверхню основного корпусу 4. У такому стані магнітний захоплю 5 вач опускають на поверхню вантажу 12. Першим вантажу 12 торкається неферомагнітне днище 13, яке приєднане до додаткового корпусу 10. Потім на днищі 13 опускається основний корпус 4, магнітною системою якого захоплюється вантаж 12. Повзун 1 з поперечиною 9 займають при цьому крайнє нижнє положення, при якому рухливі частини 17 і нерухомі частини 18 електромагнітів зістиковуються. Котушки електромагнітів підключають до джерела електроживлення, що здійснює фіксацію нижнього положення важелів 6, повзуна 1 з поперечиною 9. Захоплювач переносять до місця розвантаження. Металобрухт можна звільнити на будь-якій висоті над розвантажувальною площадкою. Для цього відключають електромагніти від джерела електроживлення, фіксація повзуна 1 і Комп’ютерна верстка А. Рябко 65031 6 поперечини 9 зникає й вони переміщаються в крайнє верхнє положення, захоплюють при цьому за собою більші плечі важелів 6, які меншими плечами через ролики 7 віджимають додатковий корпус 10 у крайнє нижнє положення. Металобрухт звільняється від магнітної системи захоплювача і падає. Захоплювач переносять до місця завантаження і цикл роботи повторюється. Корисні вироби звільняють від захоплювача після його установки на поверхню розвантажувальної площадки. Пропонований магнітний захоплювач є більш універсальним у порівнянні із прототипом тому, що дозволяє здійснювати транспортування металобрухту з можливістю звільнення його від захоплювача на будь-якій висоті над розвантажувальною площадкою. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMagnetized pickup tool
Автори англійськоюSadovoi Oleksandr Valentynovych, Kozlov Mykhailo Ivanovych
Назва патенту російськоюМагнитный захват
Автори російськоюСадовой Олександр Валентинович, Козлов Михаил Иванович
МПК / Мітки
МПК: B66C 1/04
Мітки: магнітний, захоплювач
Код посилання
<a href="https://ua.patents.su/3-65031-magnitnijj-zakhoplyuvach.html" target="_blank" rel="follow" title="База патентів України">Магнітний захоплювач</a>
Захоплювач кліщовий для слябів

Номер патенту: 56070
Опубліковано: 27.12.2010
Автори: Ісакова Анна Миколаївна, Ісаков Микола Іванович, Кашанський Дмитро Анатолійович, Железняк Віктор Вікторович
МПК: B66C 1/00
Мітки: захоплювач, кліщовий, слябів
Формула / Реферат:
Захоплювач кліщовий для слябів, що містить траверсу, на кінцях якої закріплені кліщі, кожні з яких містять дві кліщовини, виконані у вигляді двоплечих важелів, шарнірно прикріплених до корпусу, при цьому один кінець кожного з важелів з'єднаний з губкою, а другий - шарнірно з'єднаний з тягою, другий кінець якої прикріплений до траверси, причому губка шарнірно з'єднана з корпусом за допомогою шатуна, який відрізняється тим, що оснащений двома...
Автоматичний магнітний захоплювач
Номер патенту: 1836
Опубліковано: 20.12.1994
Автори: Гершенкрой Володимир Леонідович, Гордієнко Микола Іванович, Козлов Михайло Іванович
МПК: B66C 1/00
Мітки: магнітний, автоматичний, захоплювач
Формула / Реферат:
Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма фиксации, отличающийся тем, что, с целью повышения эксплуатационных качеств, отжимные...
Вантажопідйомний захоплювач
Номер патенту: 21323
Опубліковано: 15.03.2007
Автори: Шабалдак Микола Васильович, Шканов Олег Юхимович
МПК: B66C 1/22
Мітки: захоплювач, вантажопідйомний
Формула / Реферат:
1. Вантажопідйомний захоплювач, виконаний у вигляді скоби, яка навішена за допомогою стропа на крюк вантажопідйомного механізму і шарнірно зв'язаного зі скобою фіксатора, обладнаного замикаючим виступом, що жорстко скріплений з ним під деяким кутом, який відрізняється тим, що вантажопідйомний захоплювач обладнано сережкою, з одного боку шарнірно зв'язаною зі скобою, а з іншого боку зі стропом і фіксатором, виконаним у вигляді двох паралельно...
Кліщовий захоплювач
Номер патенту: 26797
Опубліковано: 10.10.2007
Автори: Мелащенко Володимир Антонович, Александрова Тетяна Володимирівна
МПК: B66C 3/00
Мітки: захоплювач, кліщовий
Формула / Реферат:
Кліщовий захоплювач, що включає щелепи у вигляді двоплечих важелів і дві тяги, які утворюють між собою шарнірний чотириланковик, вузол розкриття щелеп і вузол підвіски, який відрізняється тим, що вузол підвіски оснащений вертикальною втулкою і тягою, розташованою в цій втулці з можливістю свого подовжнього переміщення, блоком, зв'язаним з нижнім кінцем тяги, канатом, що зв'язує кінці двоплечих важелів і перекинутий через блок, двома...
Струминний захоплювач
Номер патенту: 32347
Опубліковано: 15.12.2000
Автори: Савків Володимир Богданович, Козбур Ігор Романович, Лобур Тарас Богданович, Проць Ярослав Іванович
МПК: B25J 15/06
Мітки: струминний, захоплювач
Текст:
Попередній патент: Пристрій для вібраційної обробки деталей
Наступний патент: Автоматичний магнітний захоплювач
Випадковий патент: Спосіб отримання дизельного біопалива з олії гірчиці