Автоматичний магнітний захоплювач
Номер патенту: 1836
Опубліковано: 20.12.1994
Автори: Козлов Михайло Іванович, Гершенкрой Володимир Леонідович, Гордієнко Микола Іванович
Формула / Реферат
Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий шарнирно закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма фиксации, отличающийся тем, что, с целью повышения эксплуатационных качеств, отжимные элементы представляют собой эксцентрики, а указанная кинематическая связь включает в себя расположенное в горизонтальной плоскости над эксцентриками и соединенное с ними параллельными рычагами коромысло и тягу, одним концом шарнирно соединенную с серединой коромысла, а другим — с ползуном.
Текст
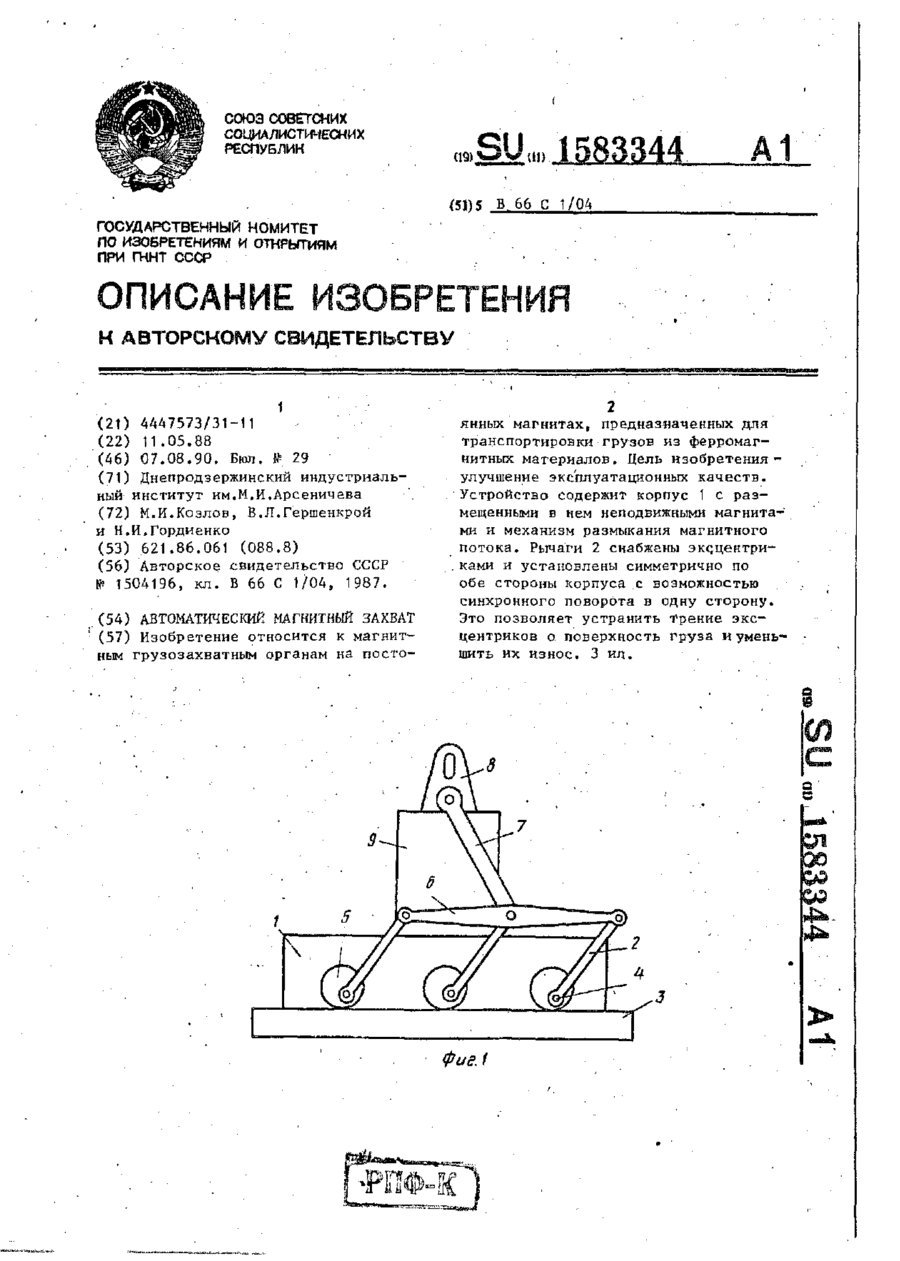
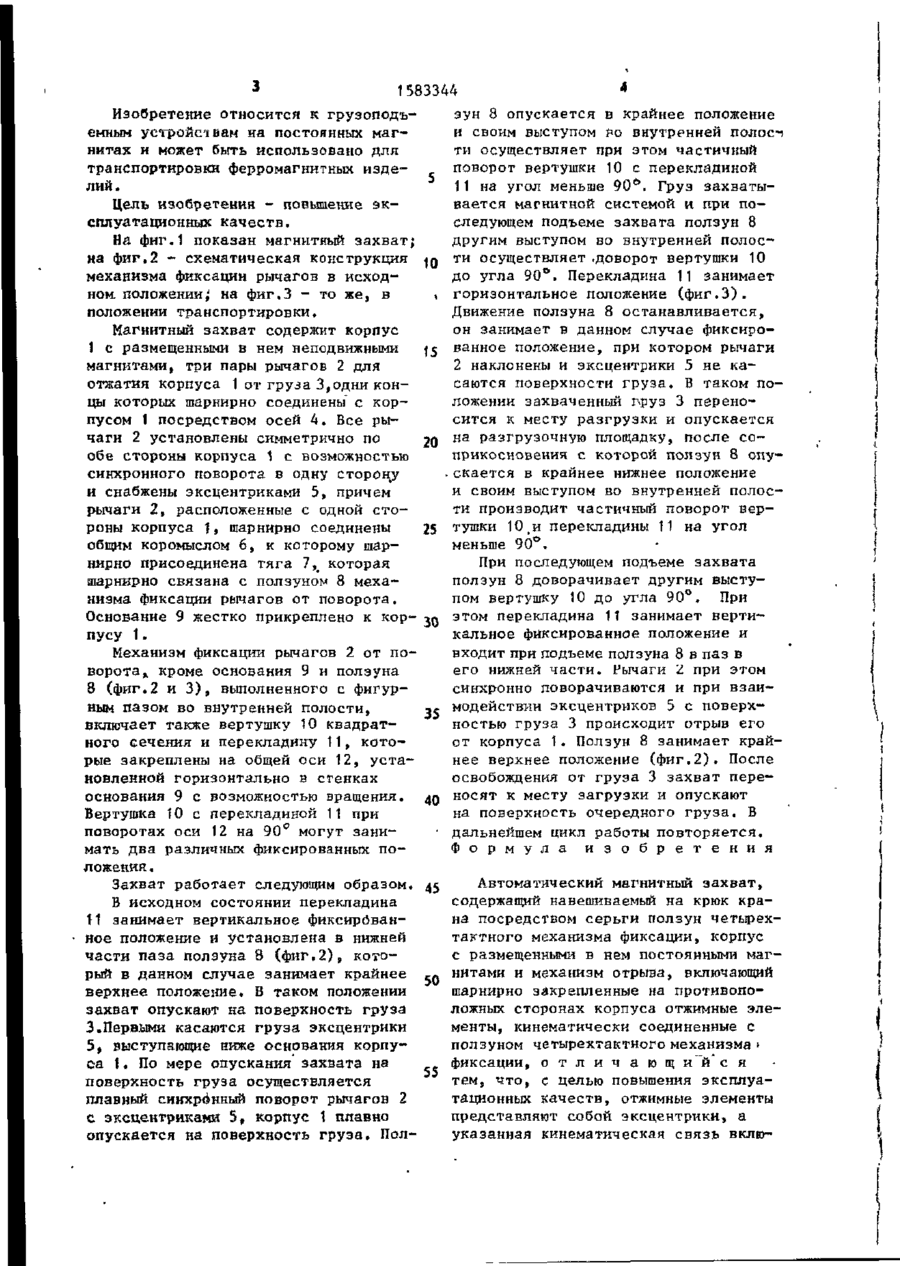
Изобретение относится к магнитным грузозахватным органам на посто янных магнитах, предназначенных для транспортировки грузов из ферромагнитных материалов. Цель изобретенияулучшение эксплуатационных качеств. Устройство содержит корпус 1 с размещенными в нем неподвижными магнитами и механизм размыкания магнитного потока. Рычаги 2 снабжены эксцентриками и установлены симметрично по обе стороны корпуса с возможностью синхронного поворота в одну сторону. Это позволяет устранить трение эксцентриков о поверхность груза и уменьшить их износ. 3 ил. І фие.і 1583344 Изобретение относится к грузоподъемным устройствам на постоянных магнитах и может быть использовано для транспортировки ферромагнитных изделий. Цель изобретения - повышение эксплуатационных качеств. На фиг.1 показан магнитный захват; на фиг.2 - схематическая конструкция механизма фиксации рычагов в исходном, положении; на фиг.З - то же, в положении транспортировки. Магнитный захват содержит корпус 1 с размещенными в нем неподвижными магнитами, три пары рычагов 2 для отжатия корпуса 1 от груза 3,одни концы которых шарнирно соединены" с корпусом 1 посредством осей 4. Все рычаги 2 установлены симметрично по обе стороны корпуса 1 с возможностью синхронного поворота в одну сторону и снабжены эксцентриками 5, причем рычаги 2, расположенные с одной стороны корпуса J, шарнирно соединены общим коромыслом 6, к которому шарнирно присоединена тяга 7К которая шарнирно связана с ползуном 8 механизма фиксации рычагов от поворота. Основание 9 жестко прикреплено к корпусу 1. Механизм фиксации рычагов 2 от поворота* кроме основания 9 и ползуна 8 (фиг.2 и 3 ) , выполненного с фигурным пазом во внутренней полости, включает также вертушку 10 квадратного сечения и перекладину 11, которые закреплены на общей оси 12, установленной горизонтально в стенках основания 9 с возможностью вращения. Вертушка 10 с перекладиной 11 при поворотах оси 12 на 90° могут занимать два различных фиксированных положения . Захват работает следующим образом. В исходном состоянии перекладина t1 занимает вертикальное фиксированное положение и установлена в нижней части паза ползуна 8 (фиг.2), который в данном случае занимает крайнее верхнее положение. В таком положении захват опускают на поверхность груза 3.Первыми касаются груза эксцентрики 5$ выступающие ниже основания корпуса 1• По мере опускания захвата на поверхность груза осуществляется плавный синхрднный поворот рычагов 2 с эксцентриками 5» корпус 1 плавно опускается на поверхность груза. Пол зун 8 опускается в крайнее положение и своим выступом Ро внутренней полосі ти осуществляет при этом частичный поворот вертушки 10 с перекладиной 11 на угол меньше 90°. Груз захватывается магнитной системой и при последующем подъеме захвата ползун 8 другим выступом во внутренней полос10 ти осуществляет .доворот вертушки 10 до угла 90°. Перекладина 11 занимает горизонтальное положение (фиг.З). Движение ползуна 8 останавливается, он занимает в данном случае фиксиро15 ванное положение, при котором рычаги 2 наклонены и эксцентрики 5 не касаются поверхности груза. В таком положении захваченный пруз 3 переносится к месту разгрузки и опускается на разгрузочную площадку, после со20 прикосновения с которой ползун 8 опу.скается в крайнее нижнее положение и своим выступом во внутренней полости производит частичный поворот вер25 тушки 10 ,и перекладины 11 на угол меньше 90°. При последующем подъеме захвата ползун 8 доворачивает другим выступом вертушку 10 до угла 90°. При этом перекладина 11 занимает вертикальное фиксированное положение и входит при подъеме ползуна 8 в паз в его нижней части. Рычаги 2 при этом синхронно поворачиваются и при взаимодействии эксцентриков 5 с поверх35 ностью груза 3 происходит отрыв его от корпуса 1. Ползун 8 занимает крайнее верхнее положение (фиг.2). После освобождения от груза 3 захват переносят к месту загрузки и опускают 40 на поверхность очередного груза. В дальнейшем цикл работы п о в т о р я е т с я . Ф о р м у л а и з о б р е т е н и я Автоматический магнитный захват, содержащий навешиваемый на крюк крана посредством серьги ползун четырехтактного механизма фиксации, корпус с размещенными в нем постоянными магнитами и механизм отрыва, включающий 50 шарнирио закрепленные на противоположных сторонах корпуса отжимные элементы, кинематически соединенные с ползуном четырехтактного механизма > фиксации, о т л и ч а ю щ и й"с я 55 тем, что, с целью повышения эксплуатационных качеств, отжимные элементы представляют собой эксцентрики, а указанная кинематическая связь вклю 45 5 1583344 * чает в себя расположенное в горизонрычагами коромысло и тягу, одним контапьной плоскости над эксцентриками цом шарнирно соединенную с серединой и соединенное с ними параллельными коромысла, а другим - с ползуном. Фив. 2 Редактор А,Мотыль Составитель А.Гаевский Техред А.Кравчук Фиг.З Корректор Л. Пилипенко Заказ 2226 Тираж 607 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-издательский комбинат "Патент", г, Ужгород, ул. Гагарина, 101 • (
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomatic magnetic gripping device
Автори англійськоюKozlov Mykhailo Ivanovych, Hershenkroi Volodymyr Leonidovych, Hordiienko Mykola Ivanovych
Назва патенту російськоюАвтоматический магнитный захват
Автори російськоюКозлов Михаил Иванович, Гершенкрой Владимир Леонидович, Гордиенко Николай Иванович
МПК / Мітки
МПК: B66C 1/00
Мітки: захоплювач, автоматичний, магнітний
Код посилання
<a href="https://ua.patents.su/4-1836-avtomatichnijj-magnitnijj-zakhoplyuvach.html" target="_blank" rel="follow" title="База патентів України">Автоматичний магнітний захоплювач</a>
Захоплювач вантажника
Номер патенту: 1886
Опубліковано: 20.12.1994
Автори: Козлинський Мирослав Петрович, Прищенко Олег Васильович
МПК: B66F 9/06
Мітки: захоплювач, вантажника
Формула / Реферат:
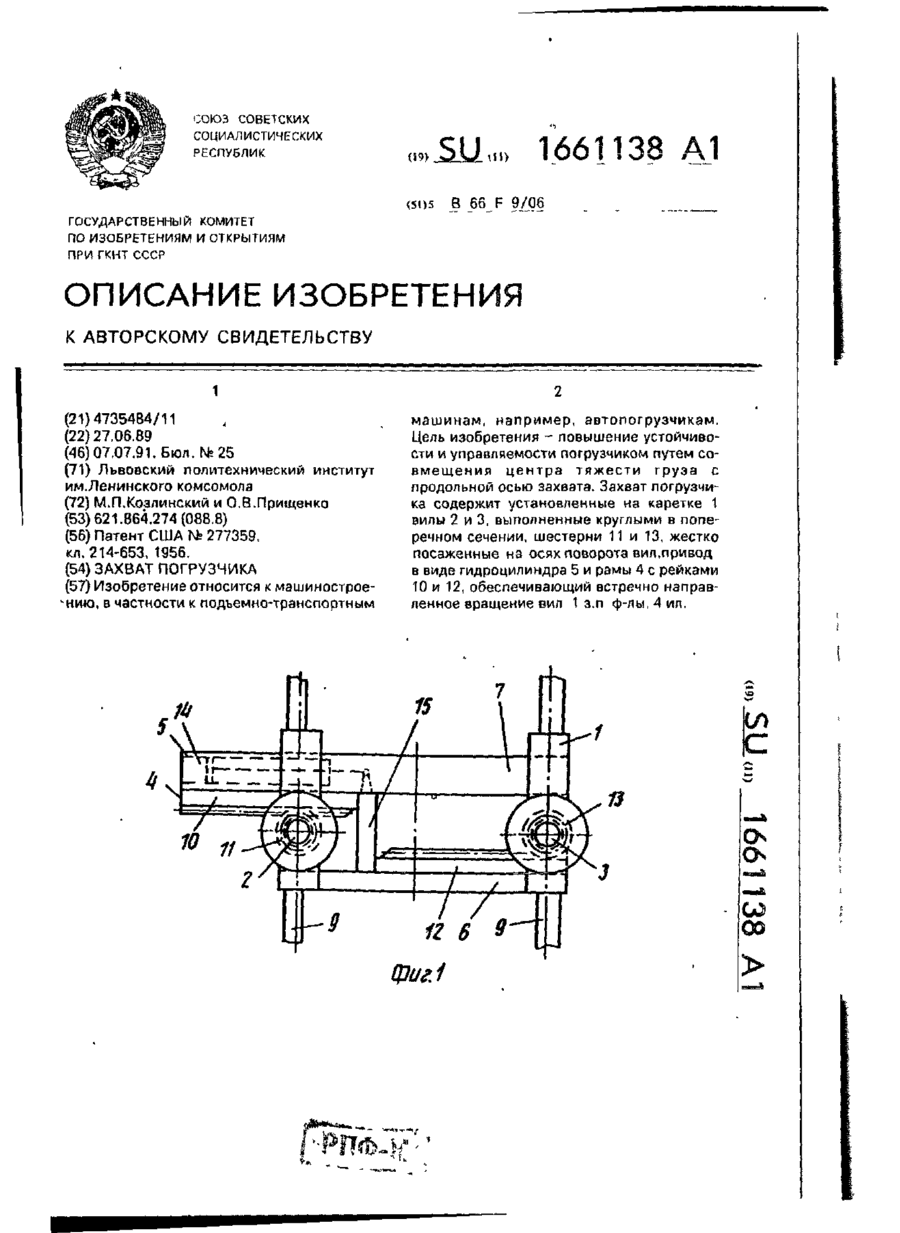
1. Захват погрузчика, содержащий пару вил круглого сечения, каждая из которых смонтирована на каретке последнего с возможностью вращения вокруг своей продольной оси, отличающийся тем, что, с целыегквышаэия устойчивости и управляемости погрузчиком путем совмещения центра тяжести груза с продольной осью захвата, вилы смонтированы с возможностью синхронного вращения приводом навстречу друг другу.2. Захват по п. 1, отличающийся тем,...
Автоматичний вимикач
Номер патенту: 1296
Опубліковано: 25.03.1994
Автори: Кузнецов Микола Макарович, Гущін Владислав Якович, Костюк Володимир Андрійович, Постольник Вячеслав Миколайович
МПК: H01H 13/52
Мітки: вимикач, автоматичний
Формула / Реферат:
Автоматический выключатель, содержащий изоляционный корпус, состоящий из двух механически соединенных, установленных одни на другую частей, сопряженных параллельно плоскости крепления выключателя, причем каждая из частей изоляционного корпуса имеет дно, расположенное также параллельно плоскости крепления выключателя, на верхней части изоляционного корпуса укреплена изоляционная крышка, под крышкой на дне этой части укреплены механизм...
Автоматичний зонт
Номер патенту: 1922
Опубліковано: 20.12.1994
Автори: Дейнека Олег Михайлович, Прилуцький Володимир Іванович
МПК: A45B 19/00
Мітки: зонт, автоматичний
Формула / Реферат:
Автоматический зонт, содержащий телескопический стержень, состоящий из внешней и внутренней трубок, соединенных между собой первой фиксирующей собачкой, при этом внутренняя трубка соединена с ручкой, в которой установлена пружина, а вторая фиксирующая собачка — с кнопкой, на внешней трубке установлена подвижная втулка, соединенная системой спиц с куполом зонта, отличающийся тем, что, с целью повышения удобства пользования, он снабжен...
Перевантажувач для закладки породи в вироблений простір лав з похилим заляганням вугільних пластів
Номер патенту: 139
Опубліковано: 30.04.1993
Автори: Федосенко Микола Васильович, Пророченко Валерій Іванович, Глухов Георгій Іванович, Бендерський Микола Васильович, Овчинніков Віталій Пилипович
МПК: E21F 13/08
Мітки: вироблений, заляганням, пластів, перевантажувач, вугільних, похилим, лав, простір, закладки, породи
Формула / Реферат:
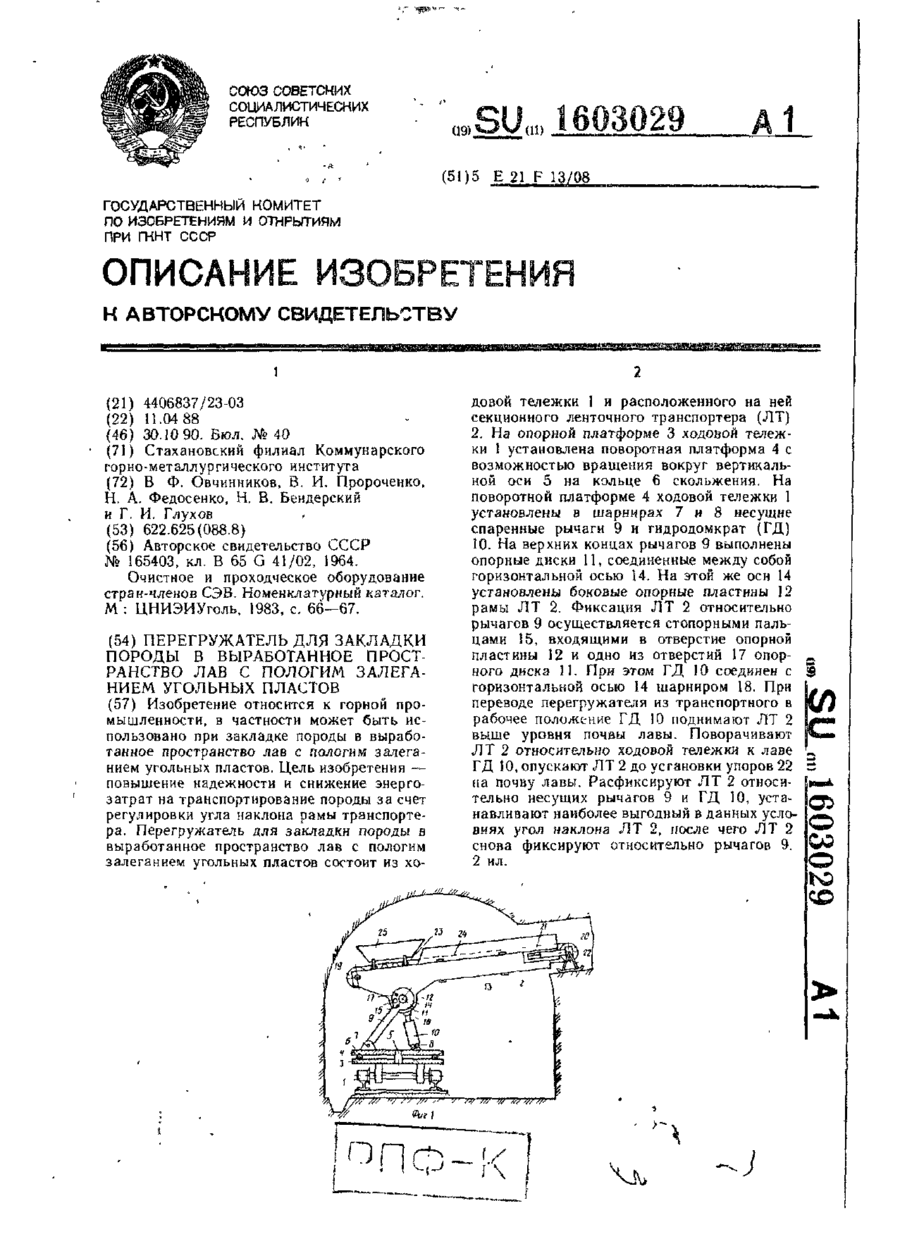
Ф о р м у л а и з о б р е т е н и я Перегружатель для закладки породы в выработанное пространство лав с пологим залеганием угольных пластов, включающий ходовую тележку с опорной платформой, на которой расположен секционный ленточный транспортер с закрепленным на нем бункером, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности и снижения энергозатрат на транспортирование породы за счет регулировки угла наклона рамы...
Автоматичний вимикач
Номер патенту: 1755
Опубліковано: 25.10.1994
Автори: Гущін Владислав Якович, Костюк Володимир Андрійович, Кузнецов Микола Макарович, Постольник Вячеслав Михайлович
МПК: H01H 71/00, H01H 73/00
Мітки: автоматичний, вимикач
Формула / Реферат:
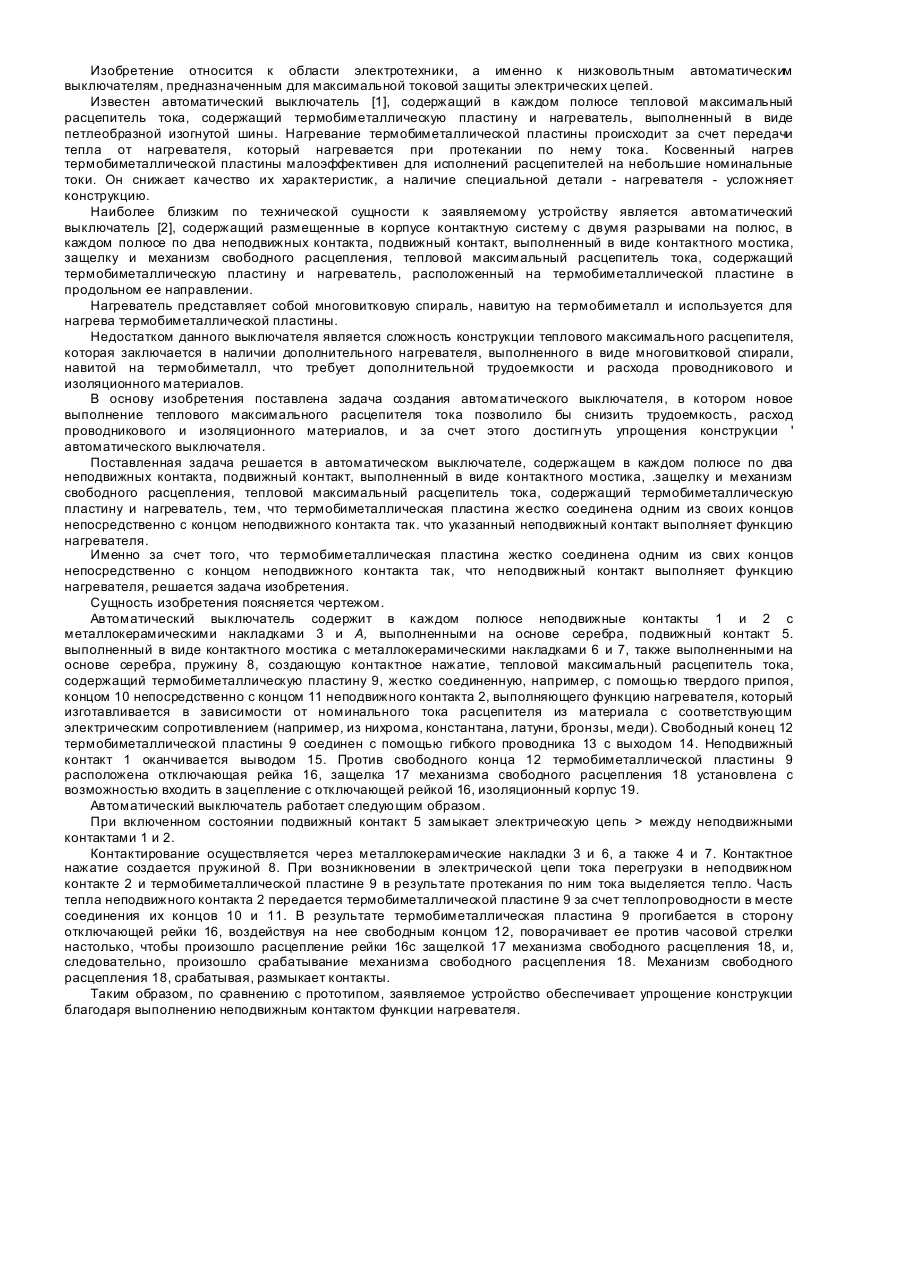
Автоматический выключатель, содержащий в каждом полюсе по два неподвижных контакта, подвижный контакт, выполненный в виде контактного мостика, защелку, механизм свободного расцепления и тепловой максимальный расцепитель тока, состоящий из термобиметаллической пластины и нагревателя, отличающийся тем, что термобиметаллическая пластина одним своим концом жестко соединена непосредственно с концом неподвижного контакта так. что указанный...
Попередній патент: Спосіб безвідходної переробки яблучних вичавок
Наступний патент: Засіб здрібнювання матеріалу і улаштування для його здійснення
Випадковий патент: Спосіб боротьби з небажаною рослинністю