Гідравлічний цифровий привід
Номер патенту: 65553
Опубліковано: 12.12.2011
Автори: Дідовець Вячеслав Євгенійович, Новік Микола Андрійович, Пирогов Артем Петрович


Формула / Реферат
1. Гідравлічний цифровий привід, що містить джерело гідравлічного живлення, багатопозиційний гідроциліндр з послідовно розміщеними у ньому з утворенням робочих і зворотної камер поршнями і штоком, розподільник, дросель, дешифратор з вхідними, вихідними і керуючими каналами і датчик лінійного переміщення, який відрізняється тим, що датчик лінійного переміщення виконаний у вигляді двох рядів нормально замкнених нерухомих вихідних і замикаючих вхідних пружних контактів з кроком рівним дискретності привода і довжиною окремих контактів меншою за величину кроку і зміщеними один відносно одного на півкроку в осьовому напрямку, паралельно ланцюгу вхідних і вихідних контактів, розміщений на штоку гідроциліндра з можливістю розмикання вхідних і вихідних контактів магнітним полем магніт, довжина якого вздовж осі штока більша за дискретність.
2. Гідравлічний цифровий привід за п. 1, який відрізняється тим, що крайні нерухомі вихідні контакти безпосередньо, а вхідні контакти через дешифратор і джерело електричного живлення підключені до котушок електромагнітів двопозиційного чотирилінійного гідравлічного розподільника, вхідні канали якого через паралельно підключені дроселі і різнобічно направлені зворотні клапани з'єднані з джерелом гідравлічного живлення, а вихідний канал гідророзподільника з'єднаний з штоковою камерою гідроциліндра.
Текст
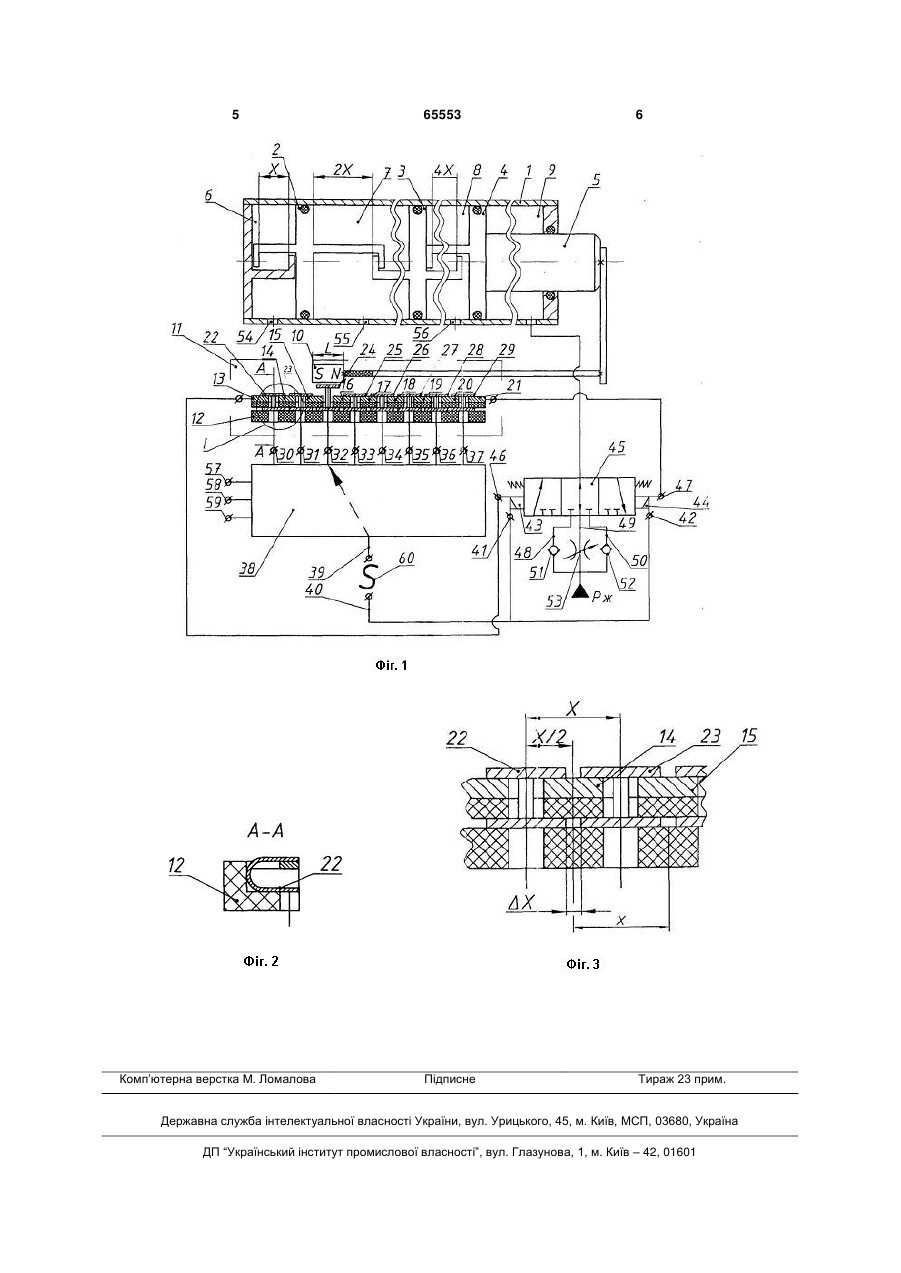
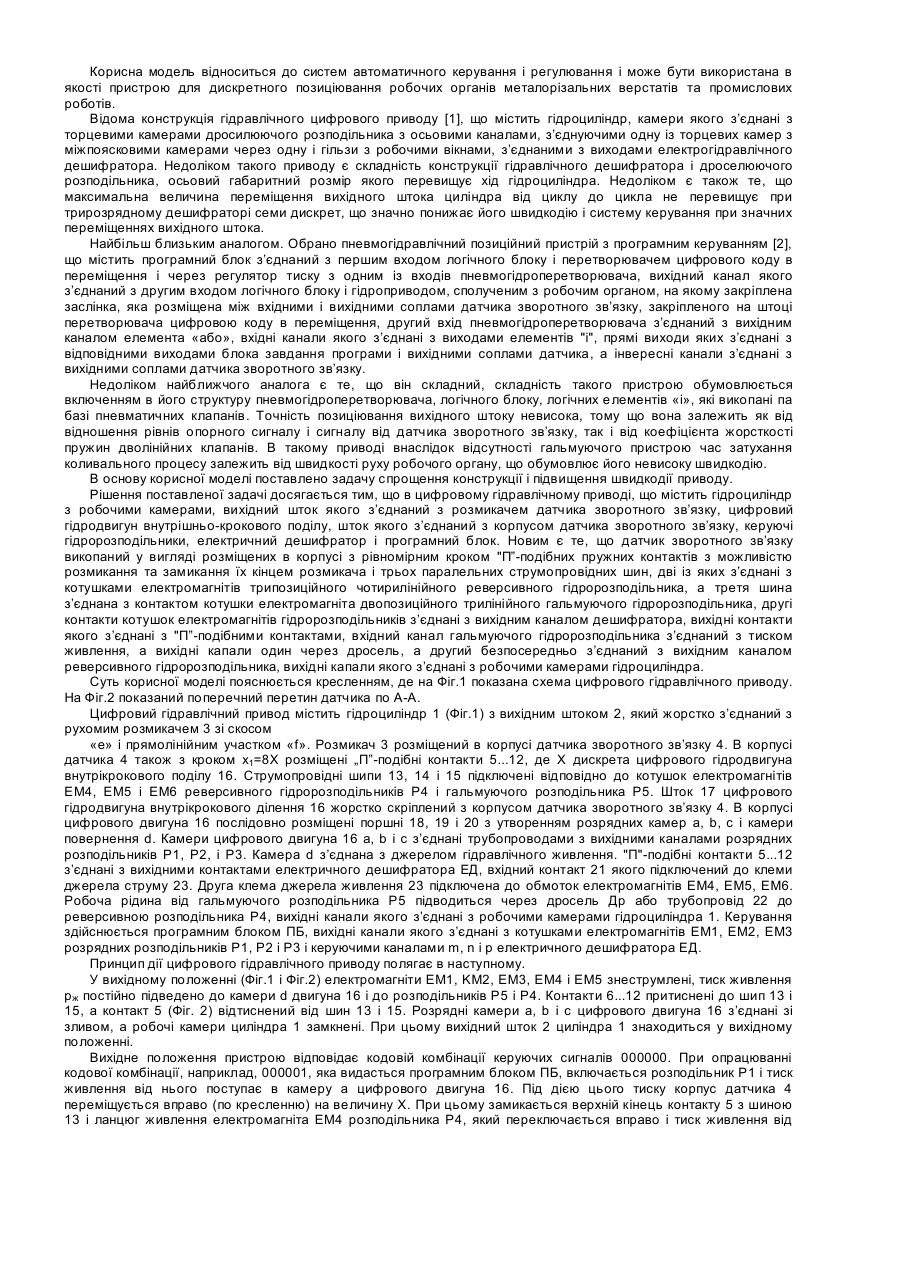
1. Гідравлічний цифровий привід, що містить джерело гідравлічного живлення, багатопозиційний гідроциліндр з послідовно розміщеними у ньому з утворенням робочих і зворотної камер поршнями і штоком, розподільник, дросель, дешифратор з вхідними, вихідними і керуючими каналами і датчик лінійного переміщення, який відрізняється тим, що датчик лінійного переміщення виконаний у вигляді двох рядів нормально замкнених нерухомих вихідних і замикаючих вхід 3 рівним дискретності привода, і довжиною окремих контактів меншою за величину кроку і зміщеними один відносно одного на півкроку в осьовому напрямку, паралельно ланцюгу вхідних і вихідних контактів, розміщений на штоку гідроциліндра з можливістю розмикання вхідних і вихідних контактів магнітним полем магніт, довжина якого вздовж осі штока більша за дискретність. Новим також є і те, що крайні нерухомі вихідні контакти безпосередньо, а вхідні контакти через дешифратор і джерело електричного живлення підключені до котушок електромагнітів двопозиційного чотирилінійного гідравлічного розподільника, вхідні канали якого через паралельно підключені дроселі і різнобічно направлені зворотні клапани з'єднані з джерелом гідравлічного живлення, а вихідний канал гідророзподільника з'єднаний з штоковою камерою гідроциліндра. Завдяки включенню в структуру привода зворотних клапанів з регульованим дроселем і трипозиційного чотирилінійного розподільника, який керується електромагнітним датчиком з дешифратором забезпечується унеможливлення виникнення незапрограмованих переміщень у русі вихідного штока і створюється можливість регулювання швидкості гальмування вихідного штока в кінці ходу, що забезпечує поліпшення динамічних характеристик і розширення області застосування привода. Відсутність гальмуючого циліндра обумовлює спрощення конструкції. Суть корисної моделі пояснюється кресленнями, де на фіг. 1. показана схема гідравлічного цифрового приводу, на фіг. 2. показаний переріз датчика по А-А, на фіг. 3. показано розміщення контактів. Гідравлічний цифровий привід містить циліндр 1, в якому розміщені розрядні поршні 2, 3, 4, з ходами, відповідно, рівними X, 2Х, 4Х і шток 5, які утворюють розрядні камери 6, 7, 8 і камеру 9 зворотного переміщення. Зі штоком 5 жорстко з'єднаний магніт 10 датчика лінійного переміщення 11. Датчик лінійного переміщення складається із корпусу 12, на якому закріплені з кроком X нерухомі вихідні контакти 13…21 і пружні вхідні контакти 22…29 (фіг. 1, фіг. 2. і фіг. 3.). Вхідні контакти датчика 11 з'єднані, відповідно, з вихідними контактами 30…37 дешифратора 38, вхідний контакт 39 якого підключений до джерела електричного живлення 60, контакт якого 40 підключений до контактів 41 і 42 електромагнітів 43 і 44 гідравлічного розподільника 45. Крайні контакти 13 і 21 датчика 11 з'єднані, відповідно, з контактами 46 і 47 електромагнітів 43 і 44 розподільника 45. Вхідні канали розподільника 48, 49 і 50 через відповідні зворотні клапани 51, 52 і дросель 53 з'єднані з джерелом гідравлічного живлення Рж. У циліндрі 1 виконані канали живлення 54, 55 і 56. Трирозрядний дешифратор 38 має розрядні керуючі контакти 57, 58 і 59. Гідравлічний цифровий привод працює наступним чином. У вихідному положенні тиск живлення подається у камеру 7 і у камеру 9 циліндра 1. Керуючий сигнал поданий на контакт 57 дешифратора 38, при цьому вхідний канал 39 з'єднаний з ви 65553 4 хідним контактом 32 і вихідним контактом 24 чика 11. Під дією магнітної сили магніту 10 контакт 24 розімкнений з контактами 15 і 16 датчика. При цьому ланцюги живлення магнітів 43 і 44 розподільника 45 знеструмлені і він знаходиться у середньому положенні. При опрацюванні кодової комбінації керуючих сигналів, наприклад, 100 тобто тиск живлення подається у камеру 8, а камера 7 з'єднується зі зливом, в цей же час подається команда на переключення дешифратора 38, при цьому подається напруга на контакт 59 і знеструмлюється контакт 58. Внаслідок цього з контактом 39 з'єднується контакт 34 і напруга від контакта 26 надходить на контакт 21 і контакт 47 електромагніта 44 розподільника 45, який перемикається вліво (по кресленню). При цьому камера 9 циліндра 1 з'єднується з джерелом живлення Рж через зворотний клапан 52 внаслідок чого шток 5 від вихідного положення може рухатися тільки вправо (по кресленню). Під дією тиску у камері 8 поршень 3 рухається вліво, а поршень 4 - вправо. При переміщенні штока 5 вправо магніт 10 також переміщується вправо і розмикає контакт 26 з контактами 17 і 18. При цьому знеструмлюється електромагніт 47, розподільник перемикається у вихідне положення і рідина із камери 9 витискується в джерело живлення Рж через дросель 53, яким і регулюється швидкість гальмування в кінці переміщення штока. Шлях гальмування визначається довжиною L магніту 10. При опрацюванні комбінації керуючих сигналів 000, тобто при з'єднанні камери 8 зі зливом і відключенні напруги від контакту 58 дешифратора 38 перемикається і з'єднує контакт 39 з контактом 30. При цьому напруга від джерела 60 через контакти 39, 30, 22, 13 і 46 підводиться до магніту 43 розподільника 45, який перемикається вправо (по кресленню). В такому положенні розподільника 45 рідина від джерела гідравлічного живлення Рж в штокову камеру 9 циліндра 1 надходить через зворотний клапан 51, що унеможливлює рух штока 5 вправо. Під дією тиску в камері 9 поршень 4 зі штоком 5 рухаються вправо. В кінці переміщення магнітом 10 (його полем) розмикається контакт 22 з контактом 13 і 14. При цьому знеструмлюється магніт 43, розподільник 45 перемикається у середнє положення. У такому положенні розподільника рідина в камеру 9 надходить від джерела живлення Рж через дросель 53, яким регулюється швидкість гальмування штока 5 в кінці руху. Величина гальмівного шляху визначається довжиною L магніту 10. Таким чином, при опрацюванні любої комбінації керуючих сигналів забезпечується гальмування вихідного штока в кінці переміщення і унеможливлюються незапрограмовані рухи при переключенні робочих (розрядних) камер. Джерела інформації: 1. А.С. СССР №1372112, Гидравлический цифровой привод, кл. F15B 11/12, 1988г., Бюл. №5. 2. М.А. Новік. Динаміка пневматичного цифрового приводу з гідравлічним гальмуючим пристроєм. Технологія і техніка друкарства. - 2006. - Вип. 4 (14). - С. 81-87. 5 Комп’ютерна верстка М. Ломалова 65553 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic digital drive
Автори англійськоюNovik Mykola Andriiovych, Didovets Viacheslav Yevheniiovych, Pyrohov Artem Petrovych
Назва патенту російськоюГидравлический цифровой привод
Автори російськоюНовик Николай Андреевич, Дидовец Вячеслав Евгеньевич, Пирогов Артем Петрович
МПК / Мітки
МПК: F15B 7/00
Мітки: цифровий, привід, гідравлічний
Код посилання
<a href="https://ua.patents.su/3-65553-gidravlichnijj-cifrovijj-privid.html" target="_blank" rel="follow" title="База патентів України">Гідравлічний цифровий привід</a>
Цифровий гідравлічний привод
Номер патенту: 32252
Опубліковано: 12.05.2008
Автор: Новік Микола Андрійович
МПК: F15B 11/00
Мітки: привод, цифровий, гідравлічний
Формула / Реферат:
Цифровий гідравлічний привод, що містить гідроциліндр з робочими камерами, вихідний шток якого з’єднаний з розмикачем датчика зворотного зв’язку, цифровий гідродвигун внутрішньокрокового поділу, шток якого з’єднаний з корпусом датчика зворотного зв’язку, керуючі гідророзподільники, електричний дешифратор і програмний блок, який відрізняється тим, що датчик зворотного зв’язку виконаний у вигляді розміщених в корпусі з рівномірним кроком...
Пневмогідравлічний цифровий привод
Номер патенту: 93441
Опубліковано: 10.02.2011
Автори: Кучерук Юрій Миколайович, Новік Микола Андрійович
МПК: F15B 11/02
Мітки: привод, цифровий, пневмогідравлічний
Формула / Реферат:
Пневмогідравлічний цифровий привод, що містить циліндр з розміщеним в ньому поршнем і вихідним штоком з утворенням гідравлічної поршневої та пневматичної штокової камер з каналами живлення, гідравлічні розрядні дозатори з вихідними гідравлічними каналами, сполученими з гідравлічною поршневою камерою і вхідними пневматичними каналами, що сполучені з вихідними каналами пневматичних двопозиційних розподільників, електричний дешифратор і датчик...
Комбінований цифровий привід
Номер патенту: 44656
Опубліковано: 12.10.2009
Автори: Новік Микола Андрійович, Кучерук Юрій Миколайович
МПК: F15B 11/00
Мітки: привід, цифровий, комбінований
Формула / Реферат:
1. Комбінований цифровий привід, що містить циліндр з послідовно розміщеними в ньому розрядними поршнями з обмежувачами відносного переміщення і вихідний шток з поршнем, які утворюють камеру зворотного руху і гідравлічну міжпоршневу камеру, яка сполучена з гідравлічними камерами розрядних гідравлічних дозаторів, який відрізняється тим, що в циліндрі закріплена додаткова перегородка з плунжером, який розміщений в осьовій розточці вихідного...
Гідравлічний привід робочого органу екскаватора
Номер патенту: 49331
Опубліковано: 16.09.2002
Автори: Токарєв Олексій Захарович, Ремарчук Микола Парфенійович, Хорунжий Володимир Дмитрович, Дзержинський Віталій Олександрович
МПК: E02F 9/22, F15B 15/22
Мітки: гідравлічний, робочого, привід, органу, екскаватора
Формула / Реферат:
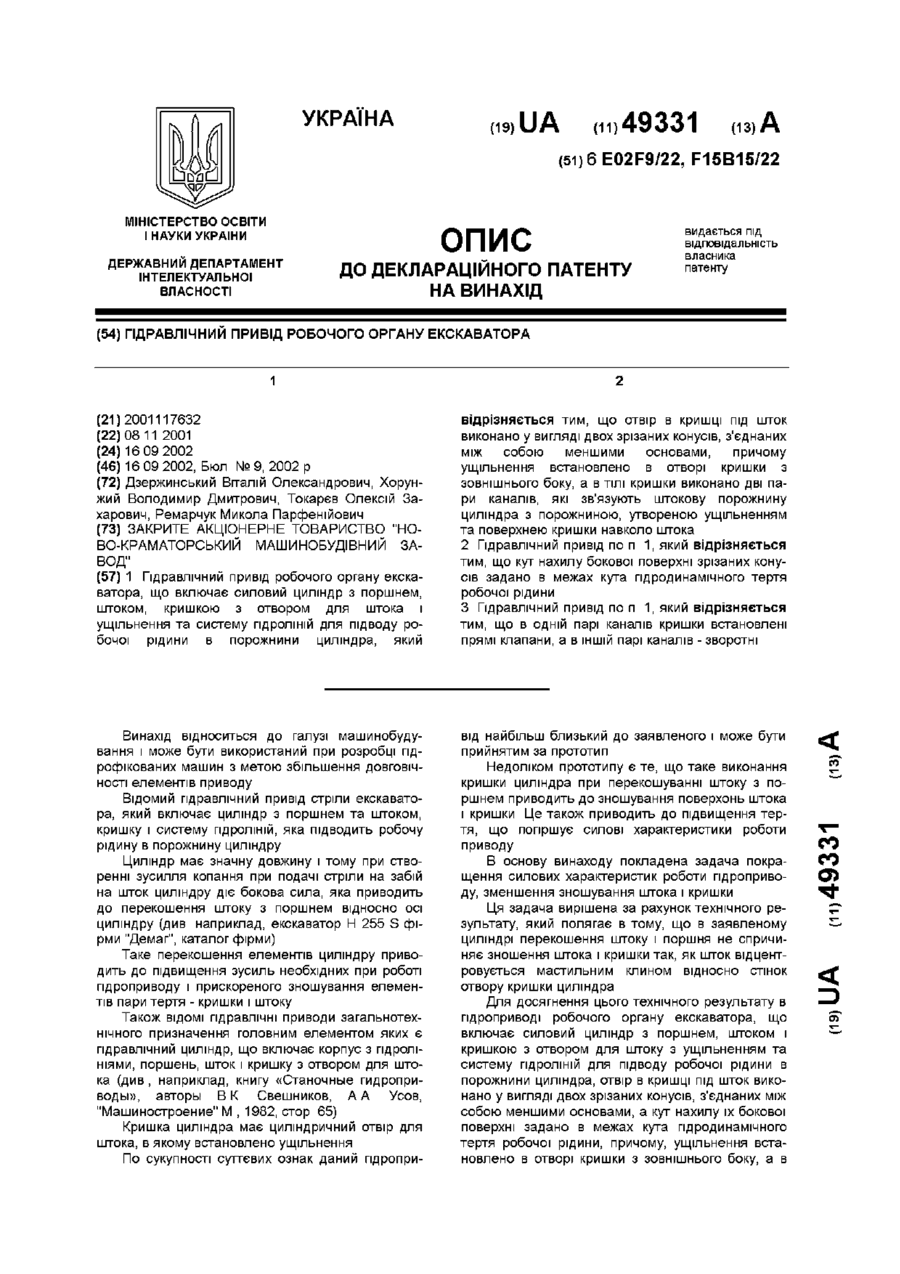
1. Гідравлічний привід робочого органу екскаватора, що включає силовий циліндр з поршнем, штоком, кришкою з отвором для штока і ущільнення та систему гідроліній для підводу робочої рідини в порожнини циліндра, який відрізняється тим, що отвір в кришці під шток виконано у вигляді двох зрізаних конусів, з'єднаних між собою меншими основами, причому ущільнення встановлено в отворі кришки з зовнішнього боку, а в тілі кришки виконано дві пари...
Гідравлічний привід робочих органів машини
Номер патенту: 7498
Опубліковано: 15.06.2005
Автори: Ярошенко Володимир Федорович, Ловейкін Вячеслав Сергійович, Рибалко Вячеслав Миколайович
МПК: A01D 69/00
Мітки: робочих, органів, машини, гідравлічний, привід
Формула / Реферат:
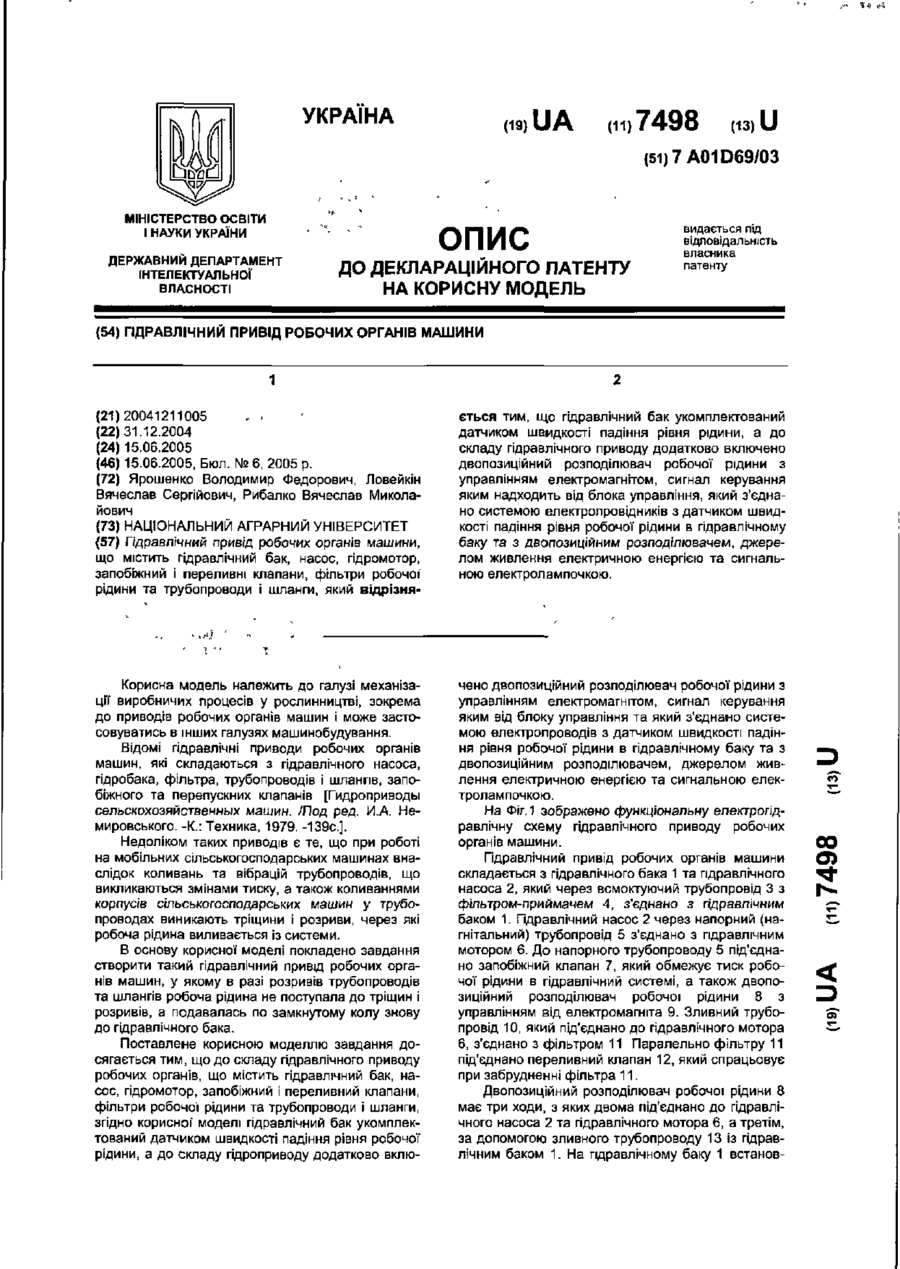
Гідравлічний привід робочих органів машини, що містить гідравлічний бак, насос, гідромотор, запобіжний і переливні клапани, фільтри робочої рідини та трубопроводи і шланги, який відрізняється тим, що гідравлічний бак укомплектований датчиком швидкості падіння рівня рідини, а до складу гідравлічного приводу додатково включено двопозиційний розподілювач робочої рідини з управлінням електромагнітом, сигнал керування яким надходить від блока...
Попередній патент: Спосіб формування силової дії
Наступний патент: Універсальний магнітофізіотерапевтичний апарат
Випадковий патент: Пристрій для розміщення людей/вантажів при їх евакуації вертольотом