Стенд фізичного моделювання нелінійних процесів
Номер патенту: 65775
Опубліковано: 12.12.2011
Автори: Гріднєв Ілля Юрійович, Шарейко Дмитро Юрійович, Фоменко Андрій Миколайович, Степанов Станислав Анатолійович, Серба Андрій Іванович
Формула / Реферат
Стенд фізичного моделювання нелінійних процесів, що містить персональний комп'ютер з необхідним програмним забезпеченням, зв'язаний з контролером, який з'єднано з перетворювачем частоти та приводом постійного струму, асинхронний двигун та тахогенератор, який відрізняється тим, що до складу стенда введено навантажувальну машину, представлену двигуном постійного струму з накоротко замкненими якірними щітками та обмоткою збудження, підключеною до контролера через привід постійного струму.
Текст
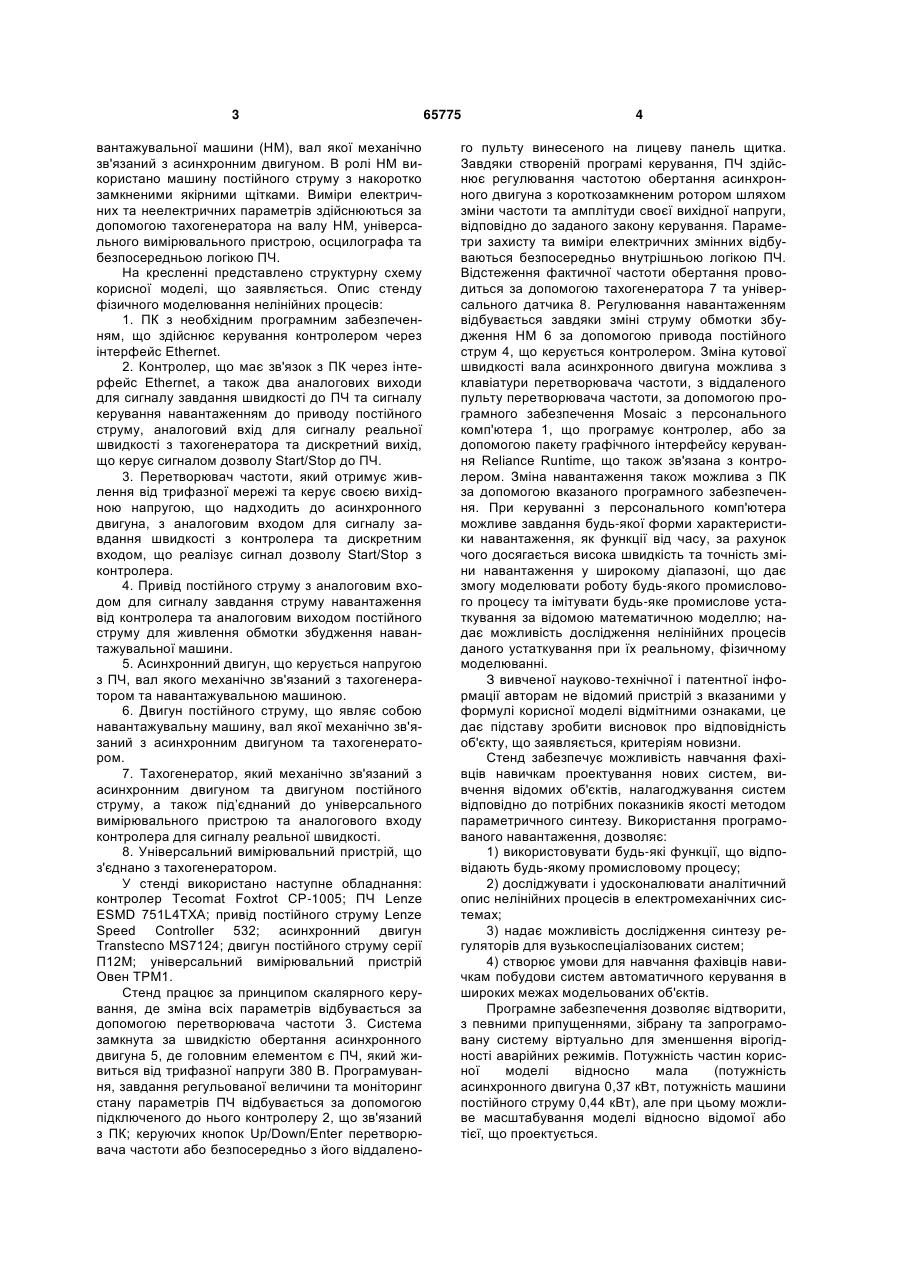
Стенд фізичного моделювання нелінійних процесів, що містить персональний комп'ютер з необхідним програмним забезпеченням, зв'язаний з контролером, який з'єднано з перетворювачем частоти та приводом постійного струму, асинхронний двигун та тахогенератор, який відрізняється тим, що до складу стенда введено навантажувальну машину, представлену двигуном постійного струму з накоротко замкненими якірними щітками та обмоткою збудження, підключеною до контролера через привід постійного струму. (19) (21) u201107799 (22) 21.06.2011 (24) 12.12.2011 (46) 12.12.2011, Бюл.№ 23, 2011 р. (72) ШАРЕЙКО ДМИТРО ЮРІЙОВИЧ, ФОМЕНКО АНДРІЙ МИКОЛАЙОВИЧ, СТЕПАНОВ СТАНИСЛАВ АНАТОЛІЙОВИЧ, ГРІДНЄВ ІЛЛЯ ЮРІЙОВИЧ, СЕРБА АНДРІЙ ІВАНОВИЧ (73) НАЦІОНАЛЬНИЙ УНІВЕРСИТЕТ КОРАБЛЕБУДУВАННЯ ІМЕНІ АДМІРАЛА МАКАРОВА 3 вантажувальної машини (НМ), вал якої механічно зв'язаний з асинхронним двигуном. В ролі НМ використано машину постійного струму з накоротко замкненими якірними щітками. Виміри електричних та неелектричних параметрів здійснюються за допомогою тахогенератора на валу НМ, універсального вимірювального пристрою, осцилографа та безпосередньою логікою ПЧ. На кресленні представлено структурну схему корисної моделі, що заявляється. Опис стенду фізичного моделювання нелінійних процесів: 1. ПК з необхідним програмним забезпеченням, що здійснює керування контролером через інтерфейс Ethernet. 2. Контролер, що має зв'язок з ПК через інтерфейс Ethernet, а також два аналогових виходи для сигналу завдання швидкості до ПЧ та сигналу керування навантаженням до приводу постійного струму, аналоговий вхід для сигналу реальної швидкості з тахогенератора та дискретний вихід, що керує сигналом дозволу Start/Stop до ПЧ. 3. Перетворювач частоти, який отримує живлення від трифазної мережі та керує своєю вихідною напругою, що надходить до асинхронного двигуна, з аналоговим входом для сигналу завдання швидкості з контролера та дискретним входом, що реалізує сигнал дозволу Start/Stop з контролера. 4. Привід постійного струму з аналоговим входом для сигналу завдання струму навантаження від контролера та аналоговим виходом постійного струму для живлення обмотки збудження навантажувальної машини. 5. Асинхронний двигун, що керується напругою з ПЧ, вал якого механічно зв'язаний з тахогенератором та навантажувальною машиною. 6. Двигун постійного струму, що являє собою навантажувальну машину, вал якої механічно зв'язаний з асинхронним двигуном та тахогенератором. 7. Тахогенератор, який механічно зв'язаний з асинхронним двигуном та двигуном постійного струму, а також під’єднаний до універсального вимірювального пристрою та аналогового входу контролера для сигналу реальної швидкості. 8. Універсальний вимірювальний пристрій, що з'єднано з тахогенератором. У стенді використано наступне обладнання: контролер Tecomat Foxtrot СР-1005; ПЧ Lenze ESMD 751L4TXA; привід постійного струму Lenze Speed Controller 532; асинхронний двигун Transtecno MS7124; двигун постійного струму серії П12М; універсальний вимірювальний пристрій Овен ТРМ1. Стенд працює за принципом скалярного керування, де зміна всіх параметрів відбувається за допомогою перетворювача частоти 3. Система замкнута за швидкістю обертання асинхронного двигуна 5, де головним елементом є ПЧ, який живиться від трифазної напруги 380 В. Програмування, завдання регульованої величини та моніторинг стану параметрів ПЧ відбувається за допомогою підключеного до нього контролеру 2, що зв'язаний з ПК; керуючих кнопок Up/Down/Enter перетворювача частоти або безпосередньо з його віддалено 65775 4 го пульту винесеного на лицеву панель щитка. Завдяки створеній програмі керування, ПЧ здійснює регулювання частотою обертання асинхронного двигуна з короткозамкненим ротором шляхом зміни частоти та амплітуди своєї вихідної напруги, відповідно до заданого закону керування. Параметри захисту та виміри електричних змінних відбуваються безпосередньо внутрішньою логікою ПЧ. Відстеження фактичної частоти обертання проводиться за допомогою тахогенератора 7 та універсального датчика 8. Регулювання навантаженням відбувається завдяки зміні струму обмотки збудження НМ 6 за допомогою привода постійного струм 4, що керується контролером. Зміна кутової швидкості вала асинхронного двигуна можлива з клавіатури перетворювача частоти, з віддаленого пульту перетворювача частоти, за допомогою програмного забезпечення Mosaic з персонального комп'ютера 1, що програмує контролер, або за допомогою пакету графічного інтерфейсу керування Reliance Runtime, що також зв'язана з контролером. Зміна навантаження також можлива з ПК за допомогою вказаного програмного забезпечення. При керуванні з персонального комп'ютера можливе завдання будь-якої форми характеристики навантаження, як функції від часу, за рахунок чого досягається висока швидкість та точність зміни навантаження у широкому діапазоні, що дає змогу моделювати роботу будь-якого промислового процесу та імітувати будь-яке промислове устаткування за відомою математичною моделлю; надає можливість дослідження нелінійних процесів даного устаткування при їх реальному, фізичному моделюванні. З вивченої науково-технічної і патентної інформації авторам не відомий пристрій з вказаними у формулі корисної моделі відмітними ознаками, це дає підставу зробити висновок про відповідність об'єкту, що заявляється, критеріям новизни. Стенд забезпечує можливість навчання фахівців навичкам проектування нових систем, вивчення відомих об'єктів, налагоджування систем відповідно до потрібних показників якості методом параметричного синтезу. Використання програмованого навантаження, дозволяє: 1) використовувати будь-які функції, що відповідають будь-якому промисловому процесу; 2) досліджувати і удосконалювати аналітичний опис нелінійних процесів в електромеханічних системах; 3) надає можливість дослідження синтезу регуляторів для вузькоспеціалізованих систем; 4) створює умови для навчання фахівців навичкам побудови систем автоматичного керування в широких межах модельованих об'єктів. Програмне забезпечення дозволяє відтворити, з певними припущеннями, зібрану та запрограмовану систему віртуально для зменшення вірогідності аварійних режимів. Потужність частин корисної моделі відносно мала (потужність асинхронного двигуна 0,37 кВт, потужність машини постійного струму 0,44 кВт), але при цьому можливе масштабування моделі відносно відомої або тієї, що проектується. 5 Економічний ефект від використання стенду полягає у тому, що непотрібне використання потужних та дорогих елементів об'єкту, а також можливо: відтворення точних умов роботи (що, іноді є Комп’ютерна верстка Л. Купенко 65775 6 неможливим), безвитратно змінювати елементи та регулятори (змінюючи лише їх передаточні функції) та отримувати результати з дуже малою похибкою. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюNonlinear process physical modeling bench
Автори англійськоюShareiko Dmytro Yuriiovych, Fomenko Andrii Mykolaiovych, Stepanov Stanislav Anatoliiovych, Hridniev Illia Yuriiovych, Serba Andrii Ivanovych
Назва патенту російськоюСтенд физического моделирования нелинейных процессов
Автори російськоюШарейко Дмитрий Юрьевич, Фоменко Андрей Николаевич, Степанов Станислав Анатольевич, Гриднев Илья Юрьевич, Серба Андрей Иванович
МПК / Мітки
МПК: G05B 23/02
Мітки: стенд, нелінійних, моделювання, процесів, фізичного
Код посилання
<a href="https://ua.patents.su/3-65775-stend-fizichnogo-modelyuvannya-nelinijjnikh-procesiv.html" target="_blank" rel="follow" title="База патентів України">Стенд фізичного моделювання нелінійних процесів</a>
Пристрій для фізичного моделювання процесів струмознімання
Номер патенту: 53528
Опубліковано: 11.10.2010
Автори: Далека Василь Хомич, Скуріхін Владислав Ігорович
Мітки: фізичного, пристрій, моделювання, струмознімання, процесів
Формула / Реферат:
Пристрій для фізичного моделювання процесів струмознімання, що містить два замкнених контури з контактних проводів, причому контактний провід першого замкненого контуру закріплений до стійок, встановлених на радіальних спицях, а контактний провід другого замкненого контуру встановлений всередині першого замкненого контуру, який відрізняється тим, що він додатково містить другий струмоприймач та джерело струму, а контактні проводи виконані з...
Спосіб фізичного моделювання процесів пророблення структури в безперервнолитих злитках при пластичній деформації
Номер патенту: 6652
Опубліковано: 16.05.2005
Автори: Мінаєв Олександр Анатолійович, Мітьєв Анатолій Петрович, Слугін Олексій Олексійович, Мягков Володимир Михайлович, Смирнов Євген Миколайович, Григор'єв Михайло Володимирович, Демидова Ірина Анатоліївна
МПК: G01N 3/28
Мітки: моделювання, пластичній, структури, пророблення, злитках, спосіб, фізичного, процесів, безперервнолитих, деформації
Формула / Реферат:
Спосіб фізичного моделювання процесів пророблення литої структури в безперервнолитих злитках, що включає виливання свинцевих модельних зразків спеціальною осьовою вставкою і їхню наступну деформацію, а також вимірювання питомого опору моделюючого зразка, який відрізняється тим, що формування необхідного виду осьової пористості в модельних зразках здійснюють за рахунок заливання попередньо виготовленої свинцево-коркової осьової вставки, що має...
Спосіб фізичного моделювання процесів пророблення структури в безперервнолитих злитках при пластичній деформації
Номер патенту: 77283
Опубліковано: 15.11.2006
Автори: Мітьєв Анатолій Петрович, Демидова Ірина Анатоліївна, Григор'єв Михайло Володимирович, Мягков Володимир Михайлович, Слугін Олексій Олексійович, Смирнов Євген Миколайович, Мінаєв Олександр Анатолійович
МПК: G01N 3/28
Мітки: пластичній, пророблення, структури, фізичного, безперервнолитих, спосіб, процесів, моделювання, деформації, злитках
Формула / Реферат:
Спосіб фізичного моделювання процесів пророблення литої структури в безперервнолитих злитках, що включає лиття свинцевих модельних зразків із спеціальною осьовою вставкою і їхньою наступною деформацією, а також вимірювання питомого опору модельного зразка, який відрізняється тим, що формування необхідного виду осьової пористості в модельних зразках здійснюють шляхом заливання попередньо виготовленої свинцево-коркової осьової вставки, питомий...
Пристрій для фізичного моделювання процесів кристалізації виливків і зливків металів та сплавів
Номер патенту: 22376
Опубліковано: 25.04.2007
Автори: Луньов Валентин Васильович, Наумик Валерій Владиленович, Бялик Гаррі Абрамович
МПК: C03B 21/00, C03B 35/00
Мітки: кристалізації, зливків, пристрій, виливків, моделювання, процесів, сплавів, металів, фізичного
Формула / Реферат:
1. Пристрій для фізичного моделювання процесів кристалізації виливків і зливків металів і сплавів, що містить тигель зі зливком вихідного матеріалу і нагрівач, який відрізняється тим, що тигель виконаний у вигляді плоского металевого зразка з металу або сплаву, кристалізація якого моделюється, зливок являє собою тонкий шар олова, що покриває цей зразок, нагрівач має плоску поверхню і за довжиною дорівнює зразку - тиглю.2. Пристрій за...
Спосіб фізичного моделювання процесів кристалізації виливків і зливків металів та сплавів
Номер патенту: 22375
Опубліковано: 25.04.2007
Автори: Бялик Гаррі Абрамович, Луньов Валентин Васильович, Наумик Валерій Владиленович
МПК: C30B 21/00, C30B 35/00
Мітки: зливків, виливків, металів, моделювання, процесів, спосіб, кристалізації, фізичного, сплавів
Формула / Реферат:
Спосіб фізичного моделювання процесів кристалізації виливків і зливків металів та сплавів, що включає покривання зразка шаром олова, його нагрівання до плавлення олова та подальше охолодження, який відрізняється тим, що зразок з металу або сплаву, кристалізація якого моделюється, розміщують на плоскому нагрівачі до повного розплавлення олова, а охолодження здійснюють на плоскому мідному водоохолоджувальному кристалізаторі при пересуванні з...
Попередній патент: Спосіб формування тонко-товстокишкового анастомозу у дітей
Наступний патент: Ріжучий інструмент
Випадковий патент: Установка безперервного лиття довгих сталевих виробів та спосіб їх безперервного лиття