Швидкісний ротаційний копер
Номер патенту: 66696
Опубліковано: 17.05.2004
Автори: Рудешко Ірина Ярославівна, Кузьміч Надія Яківна, Кузьміч Ярослав Анатолійович, Рудешко Катерина Вадимівна
Формула / Реферат
1. Швидкісний ротаційний копер, що включає раму, встановлений на рамі в підшипникових опорах привідний вал з вільно посадженим на ньому ротором, виконаним у вигляді маточини з диском та прикріпленими до нього (диска) робочим елементом і діаметрально протилежно йому - противагою, пристрій для подачі зразка з його (зразка) утримувачем, привідною пружиною і підпружиненим фіксатором положення вказаного утримувача, привід вала ротора, датчик для вимірювання частоти обертання ротора, блок управління з пусковим реле та прилад для реєстрації показань вимірювання, який відрізняється тим, що робочий елемент посаджений нерухомо на вісь, яка шарнірно встановлена на дискові ротора, і обладнаний датчиками для фіксації його (робочого елемента) просторового положення та виміру кута відхилення при перерізанні зразка і амплітуди коливань після перерізання, привідний вал ротора обладнаний датчиком для вимірювання частоти його обертання, привід вала ротора виконаний регульованим і обладнаний підпружиненою муфтою для з'єднання вказаного вала з ротором і втягувальним електромагнітом - для роз'єднання, підпружинений фіксатор утримувача зразка обладнаний також втягувальним електромагнітом для його розфіксації, блок управління обладнаний мікропроцесором та набірним полем для визначення частоти обертання привідного вала ротора, при цьому вказаний блок управління своїми входами електрично зв'язаний з виходами набірного поля і виходами датчика просторового положення робочого елемента і виходами - з втягувальними електромагнітами муфти приводу ротора та фіксатора утримувача зразка, входами датчика просторового положення робочого елемента і електроприводом протяжки стрічки реєстраційного приладу, а набірне поле своїми входами електрично зв'язане з виходами датчика для вимірювання частоти обертання вала ротора.
2. Швидкісний ротаційний копер за п. 1, який відрізняється тим, що датчик для вимірювання кута відхилення робочого елемента при перерізанні зразка і амплітуди його коливань після перерізання виконаний реохордним круговим.
3. Швидкісний ротаційний копер за пп. 1 і 2, який відрізняється тим, що датчик для фіксації просторового положення робочого елемента виконаний у вигляді фотоелектричного елемента.
Текст
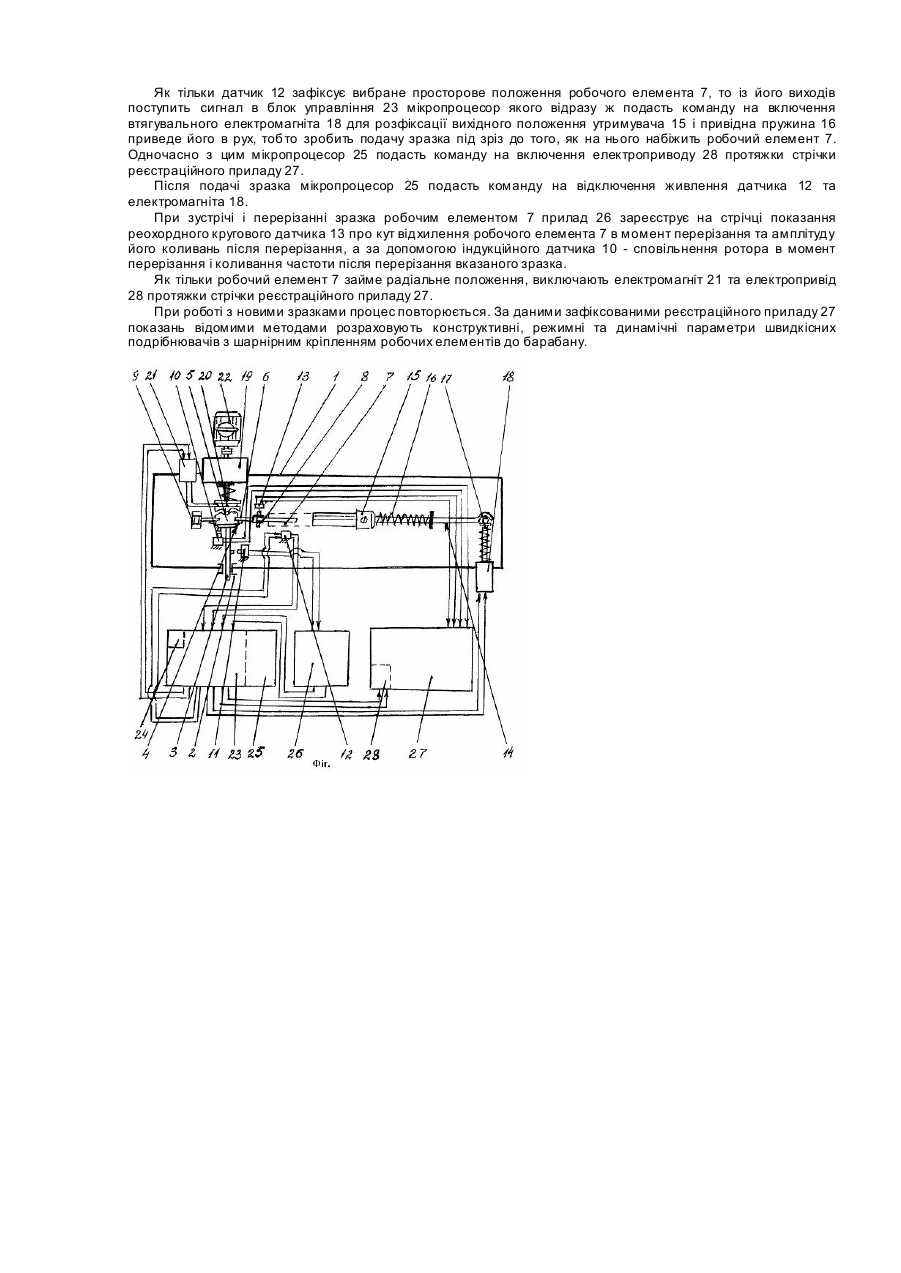
Винахід відноситься до області вимірювальних приладів і може бути ефективно використаний в галузі машинобудування, переважно сільськогосподарського для визначення конструктивних, режимних і динамічних параметрів швидкісних подрібнювачів з шарнірним кріпленням робочих елементів до барабану уже на етапі проектування. Відомі швидкість ротаційні копри, що включають раму, встановлений на рамі в підшипникових опорах привідний вал з вільно посадженим на ньому ротором виконаним у вигляді маточини з диском та прикріпленим до нього робочим елементом і діаметрально протилежно йому - противагою, утримувач зразка, привід вала ротора, блок управління з пусковим реле та прилад для реєстрації показань вимірювання (див., наприклад, авт. свід. СРСР №121585, G01N03/30, 1959). До недоліків таких швидкісних ротаційних копрів слід віднести те, що на них не можливо змоделювати і визначити роботу на перерізання стеблової рослинної сировини, яка витрачається порізно-шарнірними робочими елементами і барабаном швидкісних подрібнювачів з шарнірним кріпленням робочих елементів до барабану, а також їх динамічних характеристик таких, наприклад, як амплітуд коливань робочих елементів і сповільнення барабану, що необхідно знати для визначення конструктивних, режимних і динамічних параметрів вказаних подрібнювачів уже на стадії розробки і проектування. Далі, встановленням робочого елемента та противаги в радіальних каналах диска і обладнанням їх утримуючими стопорами ускладнюється конструкція ротора і схема управління стопорами, а використання тензодатчиків, які наклеюються на зразок призводить до значного підвищення вартості вимірювання, так як після кожного вимірювання вказані датчики на стеблових рослинних зразках розрушуються, тобто датчик можна використати тільки один раз (одна повторність вимірювання). Крім цього, через невизначеність у звільнені робочого елементу і противаги від утримуючих стопорів існує велика ймовірність того, що робочий елемент буде викинутий відцентровими силами із пазу ротора в торець зразка, що призведе до викривлення показань вимірювання, тобто до непродуктивних показань вимірювань, додаткових витрат тензодатчиків і електроенергії і, як наслідок, до подорожчання робіт по вимірюванню. За прототип прийнято найбільш близький по технічній суті швидкісний ротаційний копер, який включає раму, встановлений на рамі в підшипникових опорах привідний вал з вільно посадженим на ньому ротором виконаним у вигляді маточини з диском та прикріпленими до нього (диска) робочим елементом і діаметрально протилежно йому-противагою, пристрій для подачі зразка з його (зразка) утримувачем, привідною пружиною і підпружиненим фіксатором положення вказаного утримувача, привід вала ротора, датчик для вимірювання частоти обертання ротора, блок управління з пусковим реле та прилад для реєстрації показань вимірювання (див. авт. свід. СРСР №198026, G01N49/01, 1967). Головним недоліком прототипу, як і аналогів, є те, що на ньому неможливо змоделювати і визначити роботу на перерізання стеблової рослинної сировини, яка витрачається порізно - окремо шарнірними робочими елементами і окремо барабаном швидкісних подрібнювачів з шарнірним кріпленням робочих елементів до барабану, що, як згадувалося вище, необхідно знати при визначенні конструктивних, режимних і динамічних параметрів вказаних подрібнювачів уже на стадії їх розробки і проектування. Крім цього, розгін ротора за рахунок тертя між його маточиною та привідним валом потребує значної тривалості і витрат електроенергії. Виконанням приводу нерегульованим обмежується діапазон моделювання для визначення конструктивних, режимних і динамічних параметрів швидкісних подрібнювачів з шарнірним кріпленням робочих елементів до барабану, а через невизначеність моменту виключення електродвигуна вказаного приводу появляється невизначеність в частоті обертання ротора і одержання неповноцінних даних вимірювань. Далі, через відсутність взаємозв'язку управлінням виключенням електродвигуна приводу вала ротора і подачею зразка та їх узгодження з включенням електроприводу протяжки стрічки приладу для реєстрації показань вимірювання веде за собою, як і в аналогах, появу великої ймовірності торцевої зустрічі вказаного зразка з робочим елементом і викривлення показань вимірювань, вимушеної непродуктивної роботи копра, перевитрат електроенергії і стрічки для записування показань і, як наслідок, до здорожання виробу. Задачею винаходу є розробка конструкції швидкісного ротаційного копра в якому шля хом удосконалення конструктивно-технологічної схеми, основаної на новій сукупності конструктивних елементів, їх взаємному розташуванні і наявності зв'язків між ними забезпечується фізичне моделювання роботи швидкісних подрібнювачів з шарнірним кріпленням робочих елементів до барабану, одержання точності вимірів, виключення непродуктивної роботи копра і, як наслідок, точне визначення витрат роботи на перерізання рослинної стеблової сировини порізно-окремо робочими елементами і окремо барабаном подрібнювача, чим досягається визначення раціональних конструктивних, режимних і динамічних параметрів вказаних подрібнювачів уже на стадії їх розробки і проектування, а також зниження вартості виробу. Вказана задача вирішується за рахунок того, що в швидкісному ротаційному копрі, який включає раму, встановлений на рамі в підшипникових опорах привідний вал з вільно посадженим на ньому ротором виконаним у вигляді маточини з диском та прикріпленими до нього (диска) робочим елементом і діаметрально протилежно йому - противагою, пристрій для подачі зразка з його (зразка) утримувачем, привідною пружиною і підпружиненим фіксатором положення вказаного утримувача, привід вала ротора, датчик для вимірювання частоти обертання ротора, блок управління з пусковим реле та прилад для реєстрації показань вимірювання, робочий елемент посаджений нерухомо на ось, яка шарнірне встановлена в дискові ротора, і обладнаний датчиками для фіксації його (робочого елемента) просторового положення та виміру кута відхилення при перерізанні і амплітуди коливань після перерізання зразка, привідний вал ротора обладнаний датчиком для вимірювання частоти його обертання, привід вала ротора виконаний регульованим і обладнаний підпружиненою муфтою для з'єднання вказаного вала з ротором і втягувальним електромагнітом - для роз'єднання, підпружинений фіксатор утримувача зразка обладнаний також втягувальним електромагнітом для його розфіксації, блок управління обладнаний мікропроцесором та набірним полем для визначення частоти обертання привідного вала ротора, при цьому в казаний блок управління своїми входами пов'язаний з виходами набірного поля і датчиком просторового положення робочого елемента і виходами - з втягувальнимим електромагнітами муфти приводу ротора та фіксатора утримувача зразка, виходами датчика просторового положення робочого елемента і електроприводом протяжки стрічки реєстраційного приладу, а набірне поле своїми входами електричне пов'язане з виходами датчика для вимірювання частоти обертання вала ротора. Крім цього, датчик для вимірювання кута відхилення і амплітуди коливань робочого елемента відповідно при перерізанні і після перерізання зразка може бути виконаним реохордним круговим, а датчик для фіксації просторового положення вказаного елемента - у вигляді фотоелектричного елемента. При цьому, виконанням робочого елемента посадженим нерухомо на ось, яка шарнірно встановлена в дискові ротора забезпечується відхилення вказаного елемента при виникненні сил протидії зразка, що дозволяє змоделювати і виміряти роботу на перерізання стеблової рослинної сировини порізно-окремо шарнірними робочими елементами і окремо барабаном подрібнювачів з шарнірним кріпленням робочих органів до барабану, чим досягається визначення їх конструктивних, режимних і динамічних параметрів і, разом з цим, вказане виконання забезпечує зручність встановлення датчика для виміру кута відхилення робочого елемента і його амплітуди коливань після перерізання зразка. Обладнанням блоку управління мікропроцесором та набірним полем забезпечується необхідна послідовність виконання операцій і точність вимірювань. Обладнанням муфти привідного вала і підпружиненого фіксатора утримувача зразка втягувальними електромагнітами, привідного вала ротора датчиком для вимірювання частоти його обертання, робочого елемента датчиком для фіксації його просторового положення і вала ротора датчиком для вимірювання частоти його обертання та електричним пов'язанням входів блока управління з виходами набірного поля та датчиком просторового положення робочого елемента і виходами (блока управління) з витягувальними електромагнітами муфти вала приводу ротора та фіксатора утримувача зразка, датчиком просторового положення робочого елемента і електроприводом протяжки стрічки реєстраційного приладу, а набірного поля своїми входами - з виходами датчика для вимірювання частоти обертання вала ротора забезпечується узгодженість відключення приводу ротора з початком подачі зразка, яка, в свою чергу, узгоджується з просторовим положенням робочого елемента, чим досягається виключення вибраковочних результатів вимірювань, перевитрат електроенергії та затрат праці і, як наслідок здешевлення кінцевого виробу та підвищення його роботоздатності. Виконанням приводу вала ротора регульованим і обладнання його муфтою для з'єднання і роз'єднання вказаного вала з ротором забезпечується точно задана частота обертання ротора, що необхідно при розробці і проектуванні швидкісних подрібнювачів з шарнірним кріпленням робочих органів до барабану для переробки стеблової сировини за різним призначенням, а виконанням муфти підпружиненою забезпечується стабільне її з'єднання з ротором. Виконанням датчика для вимірювання кута відхилення і амплітуди коливань робочого елемента, у вигляді реохордного кругового, а датчика для фіксації його просторового положення - у вигляді фотоелектричного елемента забезпечується простота установки, надійність і точність вимірювання. На фіг. схематично зображено загальний вигляд швидкісного ротаційного копра. Швидкісний ротаційний копер включає раму 1, встановлений на рамі 1 в підшипникових опорах 2 привідний вал 3 з вільно посадженим на ньому ротором 4 виконаним у вигляді маточини 5 з диском 6, робочий елемент 7, який нерухомо посаджений на ось 8, що шарнірне встановлена на дискові 6. Діаметрально протилежно робочому елементу 7 до диска 6 прикріплена противага 9. Прикріплені на рамі 1 індукційні датчики 10 і 11 відповідно для вимірювання частот обертання ротора 4 та привідного вала 3, а також датчик 12 для фіксації просторового положення робочого елемента 7 та реохордний круговий датчик 13 для вимірювання кута відхилення робочого елемента 7 при перерізанні зразка і амплітуди його коливань - після перерізання. Встановлені на рамі 1 пристрій 14 подачі зразка з його (зразка) утримувачем 15, привідною пружиною 16 і підпружиненим фіксатором 17 з втягувальним електромагнітом 18 для розфіксації вихідного положення утримувача 15, регульований привід 19 привідного вала 3 ротора 4, який обладнаний підпружиненою муфтою 20 для з'єднання вказаного вала 3 з ротором 4 і втягувальним електромагнітом 21 для роз'єднання та електродвигуном 22. Швидкісний ротаційний копер також включає блок управління 23 з пусковим реле 24, який обладнаний мікропроцесором 25, набірне поле 26 та прилад 27 для реєстрації показань вимірювань з електроприводом 28 протяжки стрічки для записування даних показань. При цьому, блок управління 23 своїми входами електричне пов'язаний з виходами набірного поля 26 і виходом датчика 12 просторового положення робочого елемента 7 і виходами з витягувальними електромагнітами 18 і 21 та входами датчика просторового положення вказаного датчика 12, а набірне поле 26 своїми входами електричне пов'язане з виходами датчика 10 для вимірювання частоти обертання привідного вала 3. Швидкісний ротаційний копер працює так. Одоліваючи опір привідної пружини 16 утримувач 15 пристрою 14 для подачі зразка відтягується і фіксується у ви хідному положенні підпружиненим фіксатором 17. Далі в утримувач 15 встановляють і закріплюють зразок із стеблової рослинної сировини. За допомогою пускового реле 24 блока управління 23 запускають електродвигун 22 і регулюють привід 19 на необхідну частоту обертання привідного вала 3. При цьому, підпружинена муфта 20 буде з'єднана з ротором 4. На набірному полі 26 встановлюється значення частоти обертання відрегульоване на приводі 19. Коли привідний вал З набере задану частоту обертання набірне поле 26 зафіксує встановлені показання за допомогою індукційного датчика 11 і надасть сигнал в блок управління 23. Згідно заданої програми мікропроцесор 25 подасть команду на включення втягувального електромагніта 21 для роз'єднання вала 3 з ротором 4. Одночасно з цим від мікропроцесора 25 поступить команда на відключення електродвигуна 22 регульованого приводу 19 та на подачу живлення до датчика 12 просторового положення робочого елемента 7. Як тільки датчик 12 зафіксує вибране просторове положення робочого елемента 7, то із його виходів поступить сигнал в блок управління 23 мікропроцесор якого відразу ж подасть команду на включення втягувального електромагніта 18 для розфіксації вихідного положення утримувача 15 і привідна пружина 16 приведе його в рух, тобто зробить подачу зразка під зріз до того, як на нього набіжить робочий елемент 7. Одночасно з цим мікропроцесор 25 подасть команду на включення електроприводу 28 протяжки стрічки реєстраційного приладу 27. Після подачі зразка мікропроцесор 25 подасть команду на відключення живлення датчика 12 та електромагніта 18. При зустрічі і перерізанні зразка робочим елементом 7 прилад 26 зареєструє на стрічці показання реохордного кругового датчика 13 про кут відхилення робочого елемента 7 в момент перерізання та амплітуду його коливань після перерізання, а за допомогою індукційного датчика 10 - сповільнення ротора в момент перерізання і коливання частоти після перерізання вказаного зразка. Як тільки робочий елемент 7 займе радіальне положення, виключають електромагніт 21 та електропривід 28 протяжки стрічки реєстраційного приладу 27. При роботі з новими зразками процес повторюється. За даними зафіксованими реєстраційного приладу 27 показань відомими методами розраховують конструктивні, режимні та динамічні параметри швидкісних подрібнювачів з шарнірним кріпленням робочих елементів до барабану.
ДивитисяДодаткова інформація
Назва патенту англійськоюHigh-speed impact testing machine
Автори англійськоюKuz'mich Yaroslav Anatoliiovych
Назва патенту російськоюБыстродействующий ротационный копер
Автори російськоюКузьмич Ярослав Анатольевич
МПК / Мітки
МПК: G01N 3/30
Мітки: копер, швидкісний, ротаційний
Код посилання
<a href="https://ua.patents.su/3-66696-shvidkisnijj-rotacijjnijj-koper.html" target="_blank" rel="follow" title="База патентів України">Швидкісний ротаційний копер</a>
Ротаційний компресор
Номер патенту: 55127
Опубліковано: 17.03.2003
Автор: Плахотний Юрій Миколайович
МПК: F04C 23/00
Мітки: компресор, ротаційний
Формула / Реферат:
Ротаційний компресор, який має корпус, ексцентрично встановлений ротор з пазами, в котрих розміщені пластини, який відрізняється тим, що ротор виконаний порожнистим з наскрізними пазами, при цьому компресор споряджений колінчастим валом, встановленим з можливістю обертання в нерухомо закріплених підшипниках, вісь колінчастого вала паралельна осі ротора та дорівнює половині діаметра обертання осей кривошипів колінчастого вала, а пластини...
Низькоградієнтний ротаційний віскозиметр

Номер патенту: 53163
Опубліковано: 15.01.2003
Автори: Міщук Іван Ілліч, Трещинський Анатолій Іванович, Козловський Юрій Казимирович
МПК: G01N 11/00, G01N 11/14
Мітки: ротаційний, віскозиметр, низькоградієнтний
Формула / Реферат:
1. Низькоградієнтний ротаційний віскозиметр, що містить віскозиметричний статор і віскозиметричний ротор, які розміщені в обертальному магнітному полі статора асинхронного двигуна, датчик періоду обертів, пристрій термостатування, який відрізняється тим, що віскозиметричний статор виготовлений з ізоляційного матеріалу з конусною внутрішньою поверхнею, віскозиметричний ротор виготовлений з немагнітного матеріалу у вигляді конуса, який вільно...
Протипотоковий ротаційний пиловіддільник
Номер патенту: 40794
Опубліковано: 15.08.2001
Автори: Мохнатко Ірина Миколаївна, Рогач Юрій Петрович
МПК: B01D 45/14
Мітки: пиловіддільник, ротаційний, протипотоковий
Формула / Реферат:
Протипотоковий ротаційний пиловіддільник, який містить корпус з торцевим захисним кожухом, привідний двоконсольний електродвигун, на валу якого з одного боку закріплений ротор, а з іншого - робоче колесо, кільцеву решітку, встановлену навколо ротора й прикріплену до корпуса та захисного кожуха, який відрізняється тим, що кільцева решітка навколо ротора виконана з профільною зовнішньою поверхнею у вигляді конуса, твірна якого складена з...
Ротаційний пилевловлювач
Номер патенту: 20633
Опубліковано: 05.08.1997
Автори: Дубинін Анатолій Іванович, Майструк Володимир Володимирович
МПК: B01D 45/14
Мітки: пилевловлювач, ротаційний
Формула / Реферат:
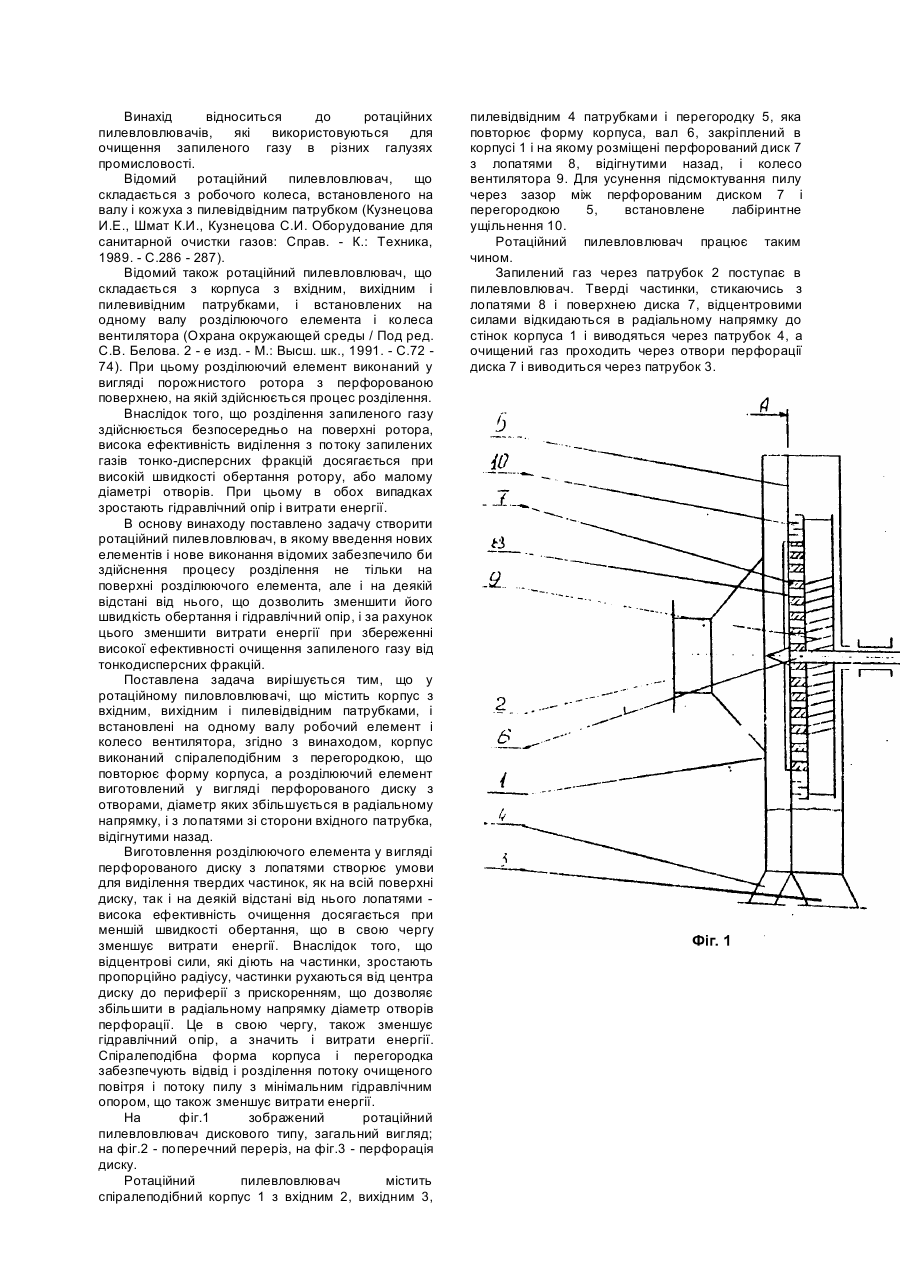
Ротаційний пиловловлювач, що містить корпус з вхідним, вихідним і пилевідвідним патрубками, і встановлені на одному валу розділюючий .елемент і колесо вентилятора, який відрізняється тим, що корпус виконаний спіралеподібним з перегородкою, що повторює форму корпуса, а розділюючий елемент виготовлений у вигляді перфорованого диску з отворами, діаметр яких збільшується в радіальному напрямку, і з лопатями зі сторони вхідного патрубка,...
Швидкісний ключ
Номер патенту: 6932
Опубліковано: 31.03.1995
Автор: Полетучий Олександр Іванович
МПК: B25B 23/14, B25B 17/00
Мітки: швидкісний, ключ
Формула / Реферат:
(57) Скоростной ключ, содержащий корпус, размещенный в нем приводной вал, волновую передачу, включающую генератор волн, соединенный с приводным валом, гибкое и жесткое зубчатые колеса, соединенный с последним шпиндель с головкой под ключ на конце, ускоряющую зубчатую передачу, включающую ведущее центральное зубчатое колесо с внутренними зубьями, подпружиненное относительно корпуса и тангенциальном направлении, и ведомое зубчатое колесо,...
Попередній патент: Спосіб обприскування та пристрій для його здійснення
Наступний патент: Пристрій для виробництва високов’язких дисперсних систем
Випадковий патент: Сходова клітка