Зубчасте зачеплення
Номер патенту: 67535
Опубліковано: 15.06.2004
Автори: Романовський Георгій Федорович, Форносов Єгор Юрійович, Попова Лариса Олексієвна, Лученков Єгор Євгенович, Попов Олексій Павлович
Формула / Реферат
Евольвентне зубчасте зачеплення, що містить ведуче і ведене зубчасті колеса з розташованими на них зубами, які знаходяться в зачепленні між собою, яке відрізняється тим, що робочі поверхні зубів ведучого зубчастого колеса в середній частині виконані із прямолінійних ділянок шириною ![]() крім того полюсна лінія ділить кожну із прямолінійних ділянок у напрямку довжини зубів на дві рівних ділянки, ширина кожної з яких дорівнює півширині площадки контакту
крім того полюсна лінія ділить кожну із прямолінійних ділянок у напрямку довжини зубів на дві рівних ділянки, ширина кожної з яких дорівнює півширині площадки контакту ![]() де
де ![]() - радіус кривизни евольвенти зуба відомого зубчастого колеса;
- радіус кривизни евольвенти зуба відомого зубчастого колеса; ![]() - нормальна сила, яка діє на спряжену пару зубів;
- нормальна сила, яка діє на спряжену пару зубів; ![]() - довжина зубів;
- довжина зубів; ![]() - приведений модуль пружності матеріалів зубів;
- приведений модуль пружності матеріалів зубів; ![]() - модулі пружності матеріалів кожного із спряженої пари зубів;
- модулі пружності матеріалів кожного із спряженої пари зубів; ![]() - модуль зачеплення;
- модуль зачеплення; ![]() - число зубів веденого зубчастого колеса;
- число зубів веденого зубчастого колеса; ![]() - кут зачеплення, прийнятий 20°.
- кут зачеплення, прийнятий 20°.
Текст
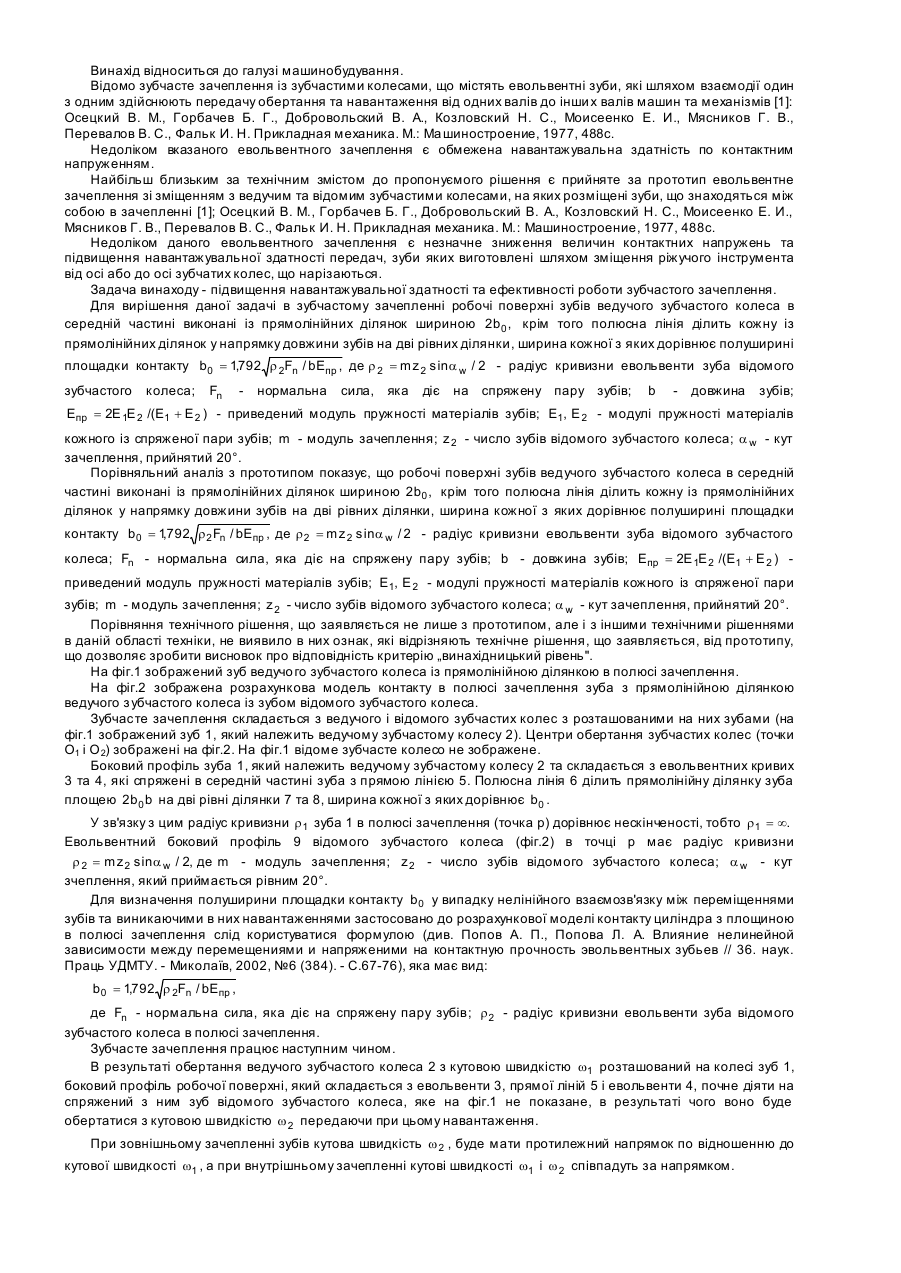
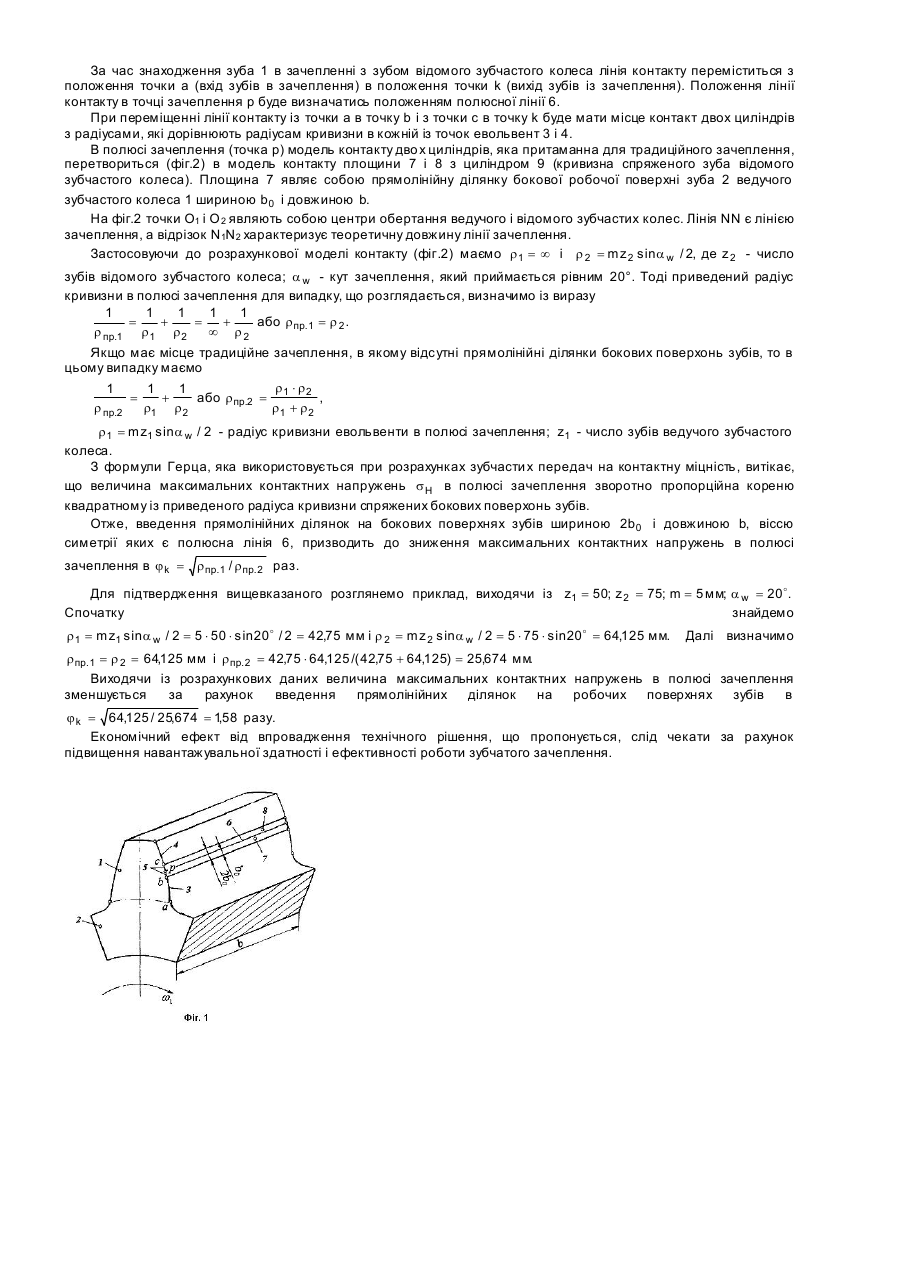
Винахід відноситься до галузі машинобудування. Відомо зубчасте зачеплення із зубчастими колесами, що містять евольвентні зуби, які шляхом взаємодії один з одним здійснюють передачу обертання та навантаження від одних валів до інши х валів машин та механізмів [1]: Осецкий В. М., Горбачев Б. Г., Добровольский В. А., Козловский Н. С., Моисеенко Е. И., Мясников Г. В., Перевалов В. С., Фальк И. Н. Прикладная механика. М.: Ма шиностроение, 1977, 488с. Недоліком вказаного евольвентного зачеплення є обмежена навантажувальна здатність по контактним напруженням. Найбільш близьким за технічним змістом до пропонуємого рішення є прийняте за прототип евольвентне зачеплення зі зміщенням з ведучим та відомим зубчастими колесами, на яких розміщені зуби, що знаходяться між собою в зачепленні [1]; Осецкий В. М., Горбачев Б. Г., Добровольский В. А., Козловский Н. С., Моисеенко Е. И., Мясников Г. В., Перевалов В. С., Фальк И. Н. Прикладная механика. М.: Машиностроение, 1977, 488с. Недоліком даного евольвентного зачеплення є незначне зниження величин контактних напружень та підвищення навантажувальної здатності передач, зуби яких виготовлені шляхом зміщення ріжучого інструмента від осі або до осі зубчатих колес, що нарізаються. Задача винаходу - підвищення навантажувальної здатності та ефективності роботи зубчастого зачеплення. Для вирішення даної задачі в зубчастому зачепленні робочі поверхні зубів ведучого зубчастого колеса в середній частині виконані із прямолінійних ділянок шириною 2b0 , крім того полюсна лінія ділить кожну із прямолінійних ділянок у напрямку довжини зубів на дві рівних ділянки, ширина кожної з яких дорівнює полуширині площадки контакту b 0 = 1,792 r 2Fn / bEпр , де r 2 = mz 2 sin a w / 2 - радіус кривизни евольвенти зуба відомого зубчастого колеса; Fn нормальна сила, яка діє на спряжену пару зубів; b довжина зубів; Eпр = 2E 1E 2 /(E1 + E 2 ) - приведений модуль пружності матеріалів зубів; E1, E 2 - модулі пружності матеріалів кожного із спряженої пари зубів; m - модуль зачеплення; z 2 - число зубів відомого зубчастого колеса; a w - кут зачеплення, прийнятий 20°. Порівняльний аналіз з прототипом показує, що робочі поверхні зубів ведучого зубчастого колеса в середній частині виконані із прямолінійних ділянок шириною 2b0 , крім того полюсна лінія ділить кожну із прямолінійних ділянок у напрямку довжини зубів на дві рівних ділянки, ширина кожної з яких дорівнює полуширині площадки контакту b 0 = 1 792 r 2 Fn / bEпр , де r 2 = mz 2 sin a w / 2 - радіус кривизни евольвенти зуба відомого зубчастого , колеса; Fn - нормальна сила, яка діє на спряжену пару зубів; b - довжина зубів; Eпр = 2E 1E 2 /(E1 + E 2 ) приведений модуль пружності матеріалів зубів; E1, E 2 - модулі пружності матеріалів кожного із спряженої пари зубів; m - модуль зачеплення; z 2 - число зубів відомого зубчастого колеса; a w - кут зачеплення, прийнятий 20°. Порівняння технічного рішення, що заявляється не лише з прототипом, але і з іншими технічними рішеннями в даній області техніки, не виявило в них ознак, які відрізняють технічне рішення, що заявляється, від прототипу, що дозволяє зробити висновок про відповідність критерію „винахідницький рівень". На фіг.1 зображений зуб ведучо го зубчастого колеса із прямолінійною ділянкою в полюсі зачеплення. На фіг.2 зображена розрахункова модель контакту в полюсі зачеплення зуба з прямолінійною ділянкою ведучого з убчастого колеса із зубом відомого зубчастого колеса. Зубчасте зачеплення складається з ведучого і відомого зубчастих колес з розташованими на них зубами (на фіг.1 зображений зуб 1, який належить ведучому зубчастому колесу 2). Центри обертання зубчастих колес (точки О1 і О 2) зображені на фіг.2. На фіг.1 відоме зубчасте колесо не зображене. Боковий профіль зуба 1, який належить ведучому зубчастому колесу 2 та складається з евольвентних кривих 3 та 4, які спряжені в середній частині зуба з прямою лінією 5. Полюсна лінія 6 ділить прямолінійну ділянку зуба площею 2b0 b на дві рівні ділянки 7 та 8, ширина кожної з яких дорівнює b0 . У зв'язку з цим радіус кривизни r 1 зуба 1 в полюсі зачеплення (точка р) дорівнює нескінченості, тобто r 1 = ¥. Евольвентний боковий профіль 9 відомого зубчастого колеса (фіг.2) в точці р має радіус кривизни r 2 = mz 2 sina w / 2, де m - модуль зачеплення; z 2 - число зубів відомого зубчастого колеса; a w - кут зчеплення, який приймається рівним 20°. Для визначення полуширини площадки контакту b0 у випадку нелінійного взаємозв'язку між переміщеннями зубів та виникаючими в них навантаженнями застосовано до розрахункової моделі контакту циліндра з площиною в полюсі зачеплення слід користуватися формулою (див. Попов А. П., Попова Л. А. Влияние нелинейной зависимости между перемещениями и напряженими на контактную прочность эвольвентных зубьев // 36. наук. Праць УДМТУ. - Миколаїв, 2002, №6 (384). - С.67-76), яка має вид: b 0 = 1,792 r 2Fn / bEпр , де Fn - нормальна сила, яка діє на спряжену пару зубів; r 2 - радіус кривизни евольвенти зуба відомого зубчастого колеса в полюсі зачеплення. Зубчасте зачеплення працює наступним чином. В результаті обертання ведучого зубчастого колеса 2 з кутовою швидкістю w1 розташований на колесі зуб 1, боковий профіль робочої поверхні, який складається з евольвенти 3, прямої ліній 5 і евольвенти 4, почне діяти на спряжений з ним зуб відомого зубчастого колеса, яке на фіг.1 не показане, в результаті чого воно буде обертатися з кутовою швидкістю w 2 передаючи при цьому навантаження. При зовнішньому зачепленні зубів кутова швидкість w 2 , буде мати протилежний напрямок по відношенню до кутової швидкості w1 , а при внутрішньому зачепленні кутові швидкості w1 і w 2 співпадуть за напрямком. За час знаходження зуба 1 в зачепленні з зубом відомого зубчастого колеса лінія контакту переміститься з положення точки a (вхід зубів в зачеплення) в положення точки k (вихід зубів із зачеплення). Положення лінії контакту в точці зачеплення р буде визначатись положенням полюсної лінії 6. При переміщенні лінії контакту із точки а в точку b і з точки с в точку k буде мати місце контакт двох циліндрів з радіусами, які дорівнюють радіусам кривизни в кожній із точок евольвент 3 і 4. В полюсі зачеплення (точка р) модель контакту дво х циліндрів, яка притаманна для традиційного зачеплення, перетвориться (фіг.2) в модель контакту площини 7 і 8 з циліндром 9 (кривизна спряженого зуба відомого зубчастого колеса). Площина 7 являє собою прямолінійну ділянку бокової робочої поверхні зуба 2 ведучого зубчастого колеса 1 шириною b0 і довжиною b. На фіг.2 точки О1 і О 2 являють собою центри обертання ведучого і відомого зубчастих колес. Лінія NN є лінією зачеплення, а відрізок N1N2 характеризує теоретичну довжину лінії зачеплення. Застосовуючи до розрахункової моделі контакту (фіг.2) маємо r 1 = ¥ і r 2 = mz 2 sina w / 2, де z 2 - число зубів відомого зубчастого колеса; a w - кут зачеплення, який приймається рівним 20°. Тоді приведений радіус кривизни в полюсі зачеплення для випадку, що розглядається, визначимо із виразу 1 1 1 1 1 = + = + або r пр. 1 = r 2 . r пр.1 r 1 r 2 ¥ r2 Якщо має місце традиційне зачеплення, в якому відсутні прямолінійні ділянки бокових поверхонь зубів, то в цьому випадку маємо r ×r 1 1 1 = + або rпр.2 = 1 2 , r пр.2 r1 r2 r1 + r2 r 1 = mz1 sina w / 2 - радіус кривизни евольвенти в полюсі зачеплення; z1 - число зубів ведучого зубчастого колеса. З формули Герца, яка використовується при розрахунках зубчасти х передач на контактну міцність, витікає, що величина максимальних контактних напружень s H в полюсі зачеплення зворотно пропорційна кореню квадратному із приведеного радіуса кривизни спряжених бокових поверхонь зубів. Отже, введення прямолінійних ділянок на бокових поверхнях зубів шириною 2b0 і довжиною b, віссю симетрії яких є полюсна лінія 6, призводить до зниження максимальних контактних напружень в полюсі зачеплення в j k = r пр. 1 / r пр. 2 раз. Для підтвердження вищевказаного розглянемо приклад, виходячи із z1 = 50; z 2 = 75; m = 5 мм; a w = 20o. Спочатку знайдемо r1 mz1 sina w / 2 5 × 50 × sin20o / 2 42,75 мм і r 2 mz 2 sina w / 2 5 × 75 × sin20o 64,125 мм. Далі визначимо r пр. 1 = r 2 = 64,125 мм і r пр. 2 = 42,75 × 64,125 /( 42,75 + 64,125) = 25,674 мм. Виходячи із розрахункових даних величина максимальних контактних напружень в полюсі зачеплення зменшується за рахунок введення прямолінійних ділянок на робочих поверхнях зубів в j k= 64,125 / 25,674 158 разу. = , Економічний ефект від впровадження технічного рішення, що пропонується, слід чекати за рахунок підвищення навантажувальної здатності і ефективності роботи зубчатого зачеплення.
ДивитисяДодаткова інформація
Назва патенту англійськоюToothed gearing
Автори англійськоюRomanovskyi Heorhii Fedorovych, Popov Oleksii Pavlovych, Popova Larysa Oleksievna, Luchenkov Yehor Yevhenovych
Назва патенту російськоюЗубчатое зацепление
Автори російськоюРомановский Георгий Федорович, Попов Алексей Павлович, Попова Лариса Алексеевна, Лученков Егор Евгеньевич
МПК / Мітки
МПК: F16H 1/00
Мітки: зубчасте, зачеплення
Код посилання
<a href="https://ua.patents.su/3-67535-zubchaste-zacheplennya.html" target="_blank" rel="follow" title="База патентів України">Зубчасте зачеплення</a>
Зубчасте зачеплення
Номер патенту: 62400
Опубліковано: 15.12.2003
Автори: Лученков Єгор Євгенович, Форносов Єгор Юрійович, Попов Олексій Павлович, Попова Лариса Олексієвна, Романовський Георгій Федорович
МПК: F16H 1/00
Мітки: зубчасте, зачеплення
Формула / Реферат:
Зубчасте зачеплення, яке складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, які знаходяться в зачепленні між собою, яке відрізняється тим, що бічні профілі головок зубів на відстані = 0,25m від полюса зачеплення виконані у вигляді кривих, що характеризуються у довільно взятих точках постійними радіусами кривизни
Зубчасте зачеплення з поздовжньо модифікованими зубами
Номер патенту: 62401
Опубліковано: 15.12.2003
Автори: Попова Лариса Олексієвна, Попов Олексій Павлович, Романовський Георгій Федорович
МПК: F16H 1/00
Мітки: зубами, зубчасте, поздовжньої, модифікованими, зачеплення
Формула / Реферат:
Зубчасте зачеплення, що складається з ведучого та веденого зубчастих коліс з розташованими на них евольвентними зубами, що знаходяться в зачепленні між собою, яке відрізняється тим, що евольвентні бічні профілі головок зубів на відстані = (0,4...0,5)m від вершин зубів замінені дугами кіл, у зв'язку з чим товщини вершин кожного із зубів зменшені на величину
Зубчасте зачеплення попова о.п.
Номер патенту: 55868
Опубліковано: 15.04.2003
Автор: Попов Олексій Павлович
МПК: F16H 1/00
Мітки: о.п, попова, зачеплення, зубчасте
Формула / Реферат:
Зубчасте зачеплення, що містить ведуче та ведене зубчасті колеса з розташованими на них зубами, що знаходяться в зачепленні між собою, яке відрізняється тим, що зуби виготовлені з евольвентних ніжок та неевольвентних головок, причому бокові профілі головок зубів отримані шляхом зменшення товщини початкових головок зубів по всій висоті з боковими профілями, які окреслені радіусами кривизни ρ11 і ρ22, розташованими на лінії...
Зубчасте колесо
Номер патенту: 35365
Опубліковано: 15.03.2001
Автор: Селівановський Володимир Юрійович
МПК: F16H 57/04
Формула / Реферат:
1. Зубчасте колесо, у тілі якого виконані радіальні канали у вигляді наскрізних отворів, яке відрізняється тим, що ці отвори виконані у зуб'ях, причому осі отворів лежать у серединній площині зуба.2. Зубчасте колесо за п. 1, яке відрізняється тим, що до внутрішньої порожнини колеса прилаштований мастилопідвідний пристрій, що підводить мастило тільки до каналів зубів, що знаходяться у зоні зачеплення. 3. Зубчасте колесо за п. 2,...
Зубчасте зачеплення черв’ячної передачі
Номер патенту: 14766
Опубліковано: 18.02.1997
Автор: Настасенко Валентин Олексійович
МПК: F16H 55/02
Мітки: зачеплення, зубчасте, передачі, черв'ячної
Формула / Реферат:
1. Зубчатое зацепление червячной передачи на базе реечного исходного контура с углом профиля на делительной прямой, отделяющей головку и ножку профиля рейки, отличающееся тем, что боковая сторона профиля червяка выполнена вогнутой, а зуба колеса - адекватно выпуклой от головки и ножки к середине профиля на величину модификации контактирующих поверхностей, форма которых перераспределяет тепловые и силовые нагрузки от вершины к ножке витка...
Попередній патент: Подрібнювач-диспергатор
Наступний патент: Спосіб отримання нанотрубок оксидів вольфраму контрольованого розміру
Випадковий патент: Спосіб одержання бактеріального концентрату бмк для виробництва продуктів функціонального харчування