Пристрій для зважування залізничних составів під час руху
Номер патенту: 38561
Опубліковано: 15.05.2001
Автори: Лісовий Віталій Васильович, Раздобаров Віктор Георгійович, Павлець Олексій Гаврилович, Чаков Олександр Миколайович, Сацюк Валерій Іванович

Формула / Реферат
(21) 2000074480
(54) (57)
Дата прийняття
рішення
31.01.2001 р.
Пристрій для зважування залізничних составів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, чотири шляхові датчики, розміщені попарно симетрично відносно центру вантажоприймальної платформи, котрі з'єднані через блок спряження з вузлом напрямку руху і мультиплексором і обчислювальний блок, причому вихід вузла напрямку руху з'єднаний з керуючим входом мультиплексора, відмінний тим, що в нього введені підсумовуючий блок, аналого-цифровий перетворювач, при цьому входи підсумовуючого блоку з'єднані з ваговимірювальними датчиками, а його виходи з'єднані з входом аналого-цифрового перетворювача, вихід якого з'єднаний з інформаційним входом обчислювального блоку; введено блок ідентифікації візків вагона,' до складу якого входять перший елемент АБО-НІ, перший формувач прямокутного імпульсу, D- тригер, регістр, другий формувач прямокутного імпульсу, другий, третій і четвертий елементи АБО-НІ, елемент І-НІ, елемент НІ, два елемента І та елемент АБО, причому входи першого елемента АБО-НІ підключені до першого і другого виходів мультиплексора, а вихід з'єднаний з входом першого формувача, D- вхід D- триггера підключений до третього виходу мультиплексора, вхід другого формувача і С- входи D- тригера та регістра підключені до виходу першого формувача; інверсний вихід D- тригера з'єднаний з входами другого елемента АБО-НІ і першого елемента І, а прямий вихід - з входами третього елемента АБО-НІ і другого елемента І, другі входи другого і третього елементів АБО-НІ підключені до третього і четвертого виходів регістра відповідно, а їх виходи з'єднані з входами четвертого елемента АБО-НІ, вихід якого з'єднаний з R- входами регістра і D- тригера; другий вихід регістра з'єднаний з входом елемента НІ і першим входом елемента I- НІ, другий вхід якого підключений до третього виходу регістра, виходи елемента І-НІ і елемента НІ з'єднані з другими входами першого і другого елементів І віповідно, а їх треті виходи підключені до виходу другого формувача; виходи першого і другого елементів І з'єднані з входами елемента АБО, вихід якого з'єднаний з керуючими входами аналого-цифрового перетворювача і обчислювального блоку.
Текст
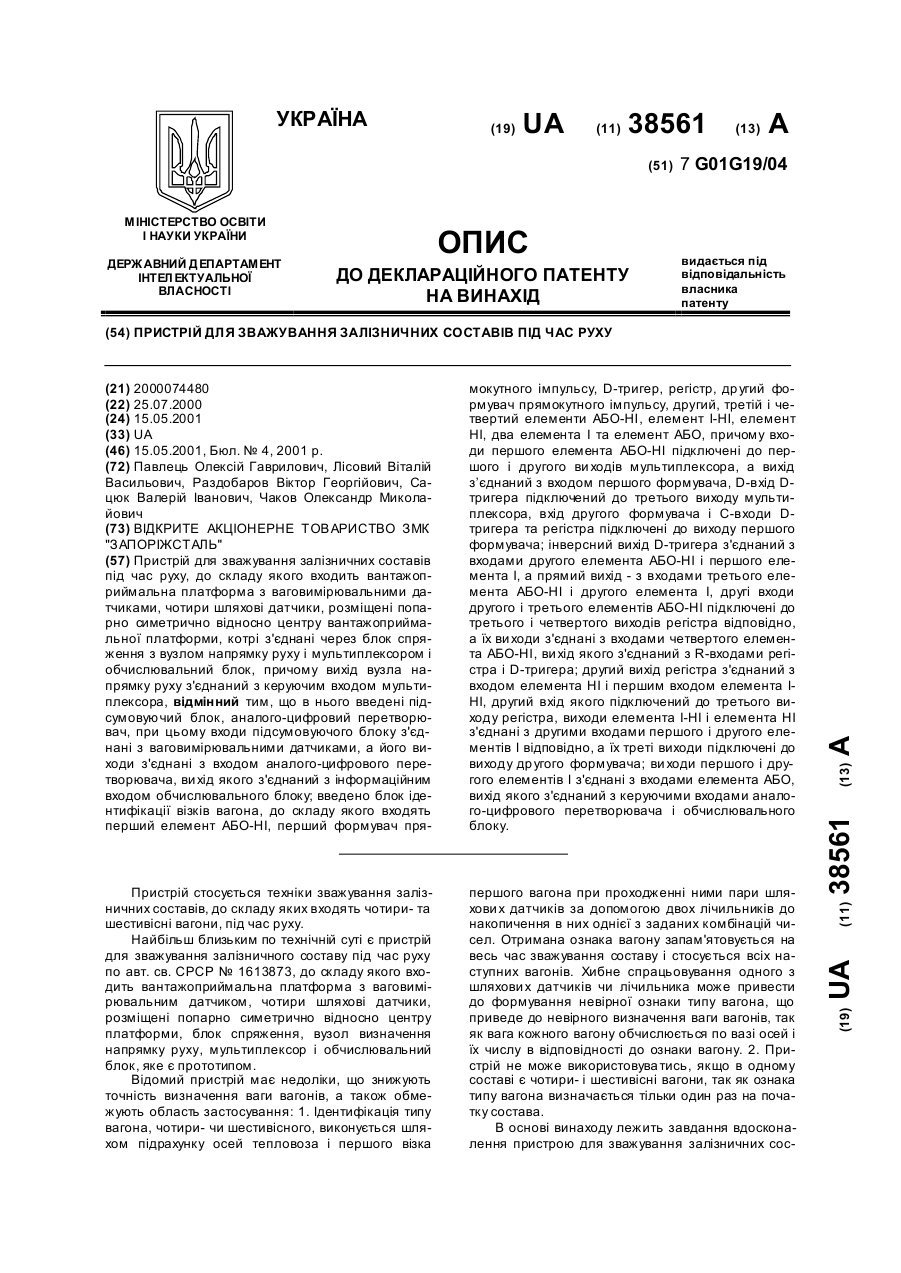
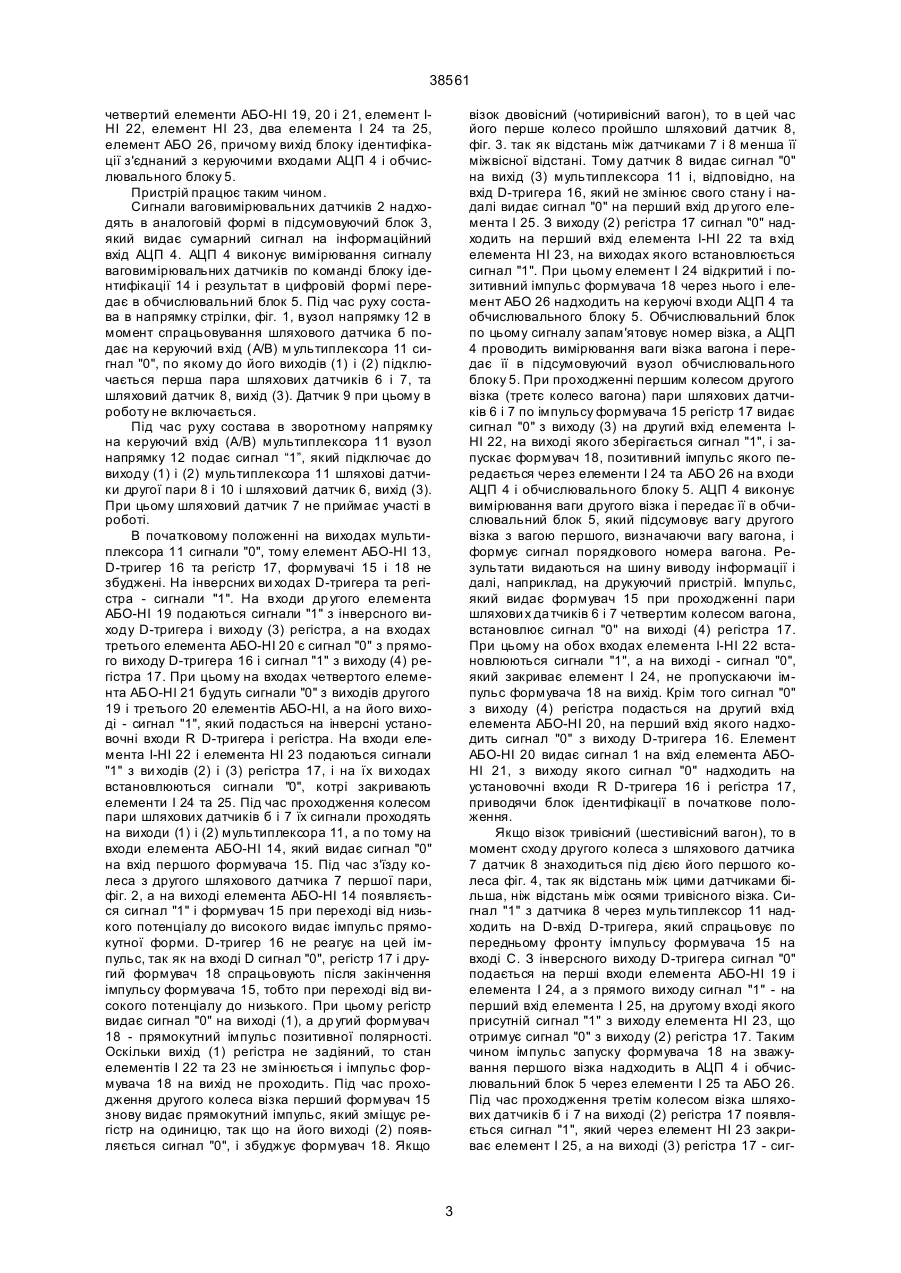
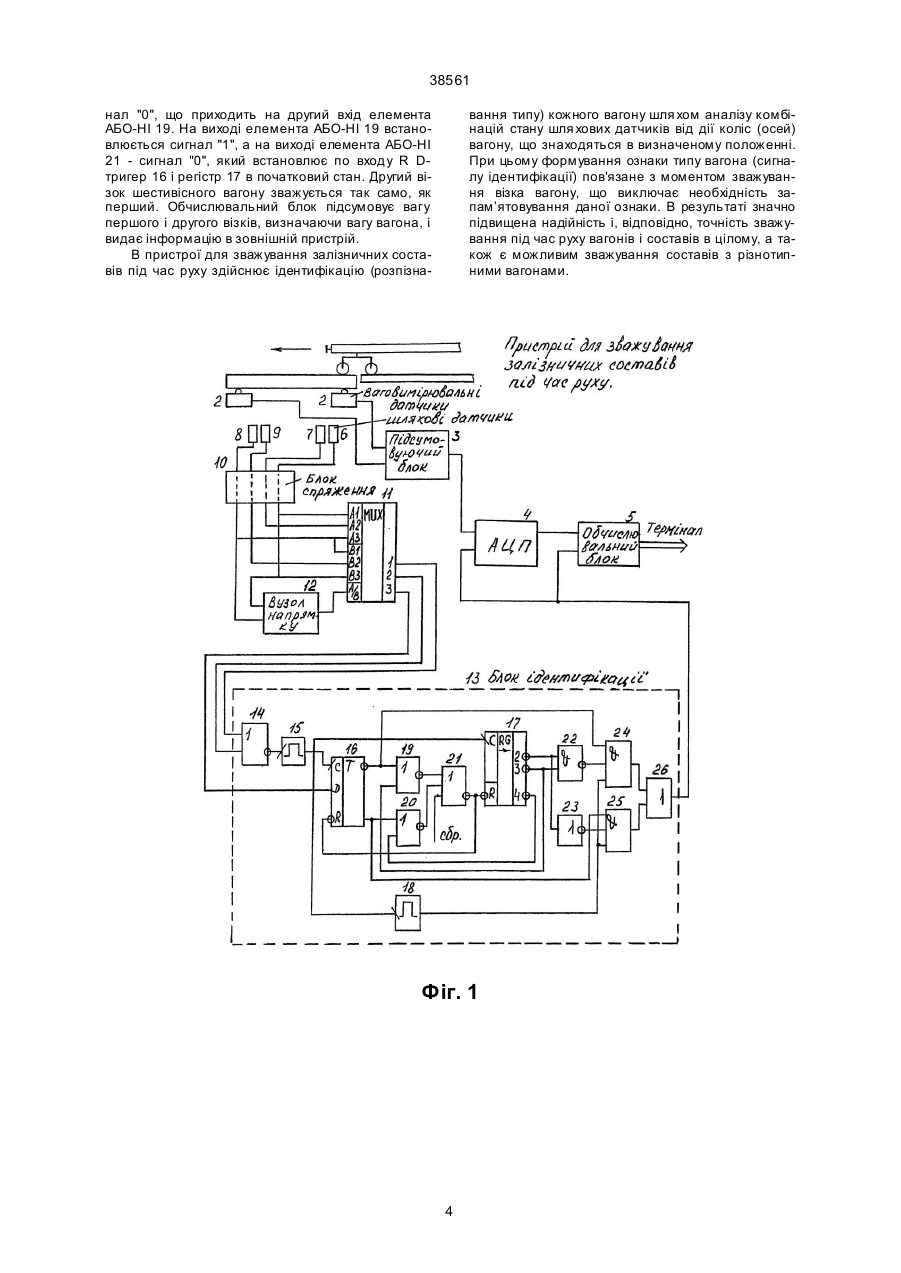
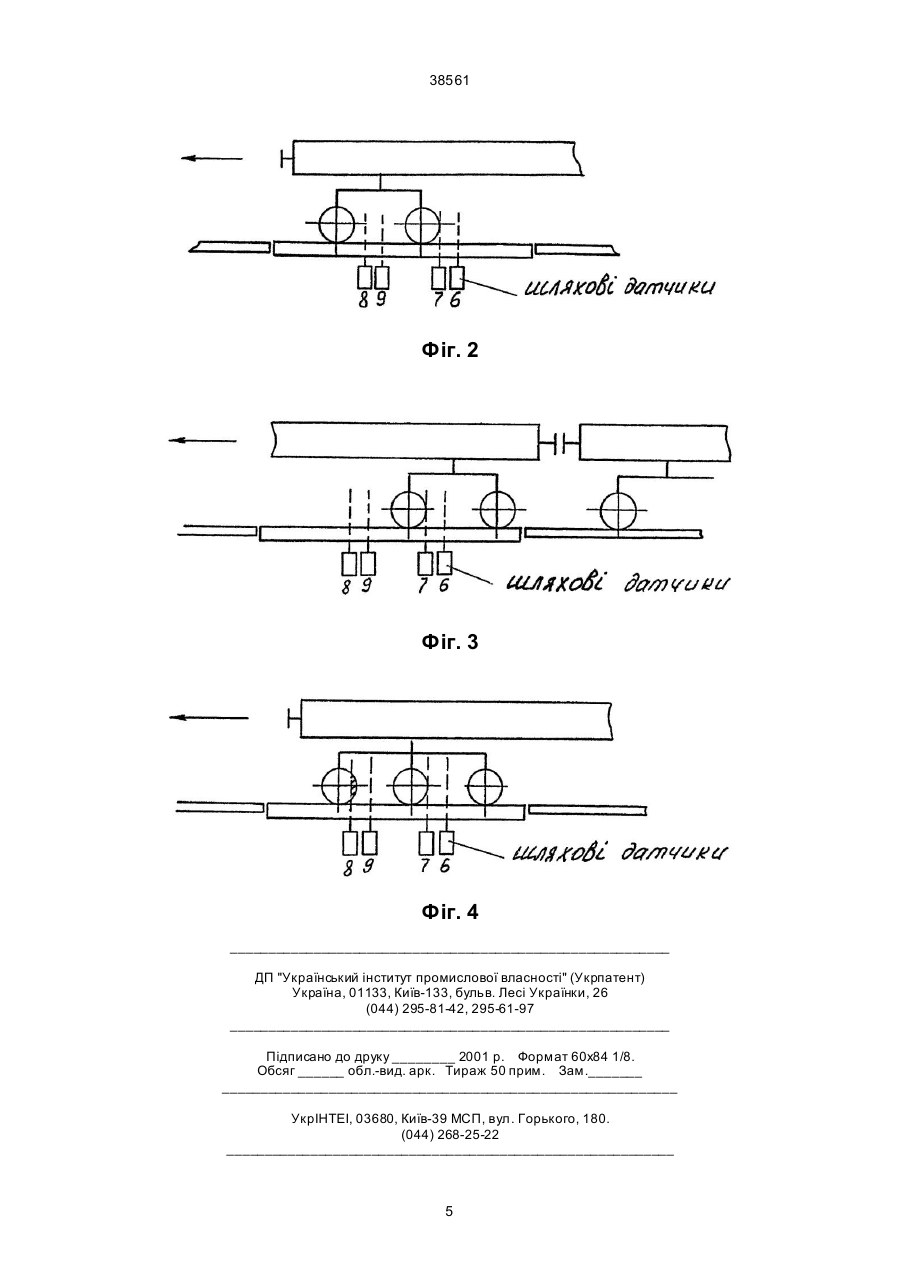
Пристрій для зважування залізничних составів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, чотири шляхові датчики, розміщені попарно симетрично відносно центру вантажоприймальної платформи, котрі з'єднані через блок спряження з вузлом напрямку руху і мультиплексором і обчислювальний блок, причому вихід вузла напрямку руху з'єднаний з керуючим входом мультиплексора, відмінний тим, що в нього введені підсумовуючий блок, аналого-цифровий перетворювач, при цьому входи підсумовуючого блоку з'єднані з ваговимірювальними датчиками, а його виходи з'єднані з входом аналого-цифрового перетворювача, ви хід якого з'єднаний з інформаційним входом обчислювального блоку; введено блок ідентифікації візків вагона, до складу якого входять перший елемент АБО-НІ, перший формувач пря A (54) ПРИСТРІЙ ДЛЯ ЗВАЖУВАННЯ ЗАЛІЗНИЧНИХ СОСТАВІВ ПІД ЧАС РУХУ 38561 тавів під час руху, шляхом створення нової схеми, котра за допомогою аналізу комбінацій стану шляхови х датчиків виконує ідентифікацію кожного вагона, що дозволяє підвищити надійність і точність пристрою, а також використовувати його при наявності в составі чотири- і шести вісних вагонів. Поставлене завдання вирішується таким чином. У відомому пристрої для зважування залізничних составів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, чотири шляхові датчики, розміщені попарно симетрично відносно центру вантажоприймальної платформи, котрі з'єднані через блок спряження з вузлом напрямку руху і мультиплексором і обчислювальний блок, причому вихід вузла напрямку руху з'єднаний з керуючим входом мультиплексора, передбачені наступні відмінності: в нього введені підсумовуючий блок, аналогоцифровий перетворювач, при цьому входи підсумовуючого блоку з'єднані з ваговимірювальними датчиками, а його виходи з'єднані з входом аналого-цифрового перетворювача, вихід якого з'єднаний з інформаційним входом обчислювального блоку; введено блок ідентифікації візків вагона, до складу якого входять перший елемент АБО-НІ, перший формувач прямокутного імпульсу, D-тригер, регістр, другий формувач прямокутного імпульсу, другий, третій і четвертий елементи АБО-НІ, елемент І-НІ, елемент НІ, два елемента І та елемент АБО, причому входи першого елемента АБО-НІ підключені до першого і другого ви ходів мультиплексора, а вихід з'єднаний з входом першого формувача, D-вхід D-тригера підключений до третього виходу мультиплексора, вхід другого формувача і С-входи D-тригера та регістра підключені до виходу першого формувача; інверсний вихід Dтригера з'єднаний з входами другого елемента АБО-НІ і першого елемента І, а прямий вихід - з входами третього елемента АБО-НІ і другого елемента І, другі входи другого і третього елементів АБО-НІ підключені до третього і четвертого виходів регістра відповідно, а їх виходи з'єднані з входами четвертого елемента АБО-НІ, ви хід якого з'єднаний з R-входами регістра і D-тригера; другий вихід регістра з'єднаний з входом елемента НІ і першим входом елемента І-НІ, другий вхід якого підключений до третього виходу регістра, виходи елемента І-НІ і елемента НІ з'єднані з другими входами першого і другого елементів І відповідно, а їх треті ви ходи підключені до виходу другого формувача; виходи першого і другого елементів І з'єднані з входами елемента АБО, ви хід якого з'єднаний з керуючими входами аналого-цифрового перетворювача і обчислювального блоку. Між сукупністю ознак та досягнутим технічним результатом існує наступний причинно-наслідковий зв'язок. В пристрої чотири шляхові датчики розміщені двома парами симетрично відносно центру вантажоприймальної платформи. Відстань між парами датчиків (1800 мм) менша міжвісної відстані двовісного візка чотиривісного вагону, яка дорівнює 1850 мм, але більша, ніж відстань між осями тривісного візка шестивісного вагона, яка складає 1750 мм; відстань між датчиками в кожній парі забезпечує їх одночасне спрацьовування від одного колеса. З допомогою вузла визначення напрямку руху і мультиплексора в роботу включається перша по ходу состава пара шляхових датчиків, тобто перший і другий датчик, і останній четвертий датчик другої пари, по стану якого в момент надходження сигналу осі від першої пари датчиків визначається тип вагона. Третій датчик в роботу не вводиться. Чотиривісний вагон зважується в такій послідовності. Сигнал (команда) на зважування першого візка видасться при проходженні першої пари шляхових датчиків її другим колесом. В цей момент перше колесо візка проминуло останній датчик другої пари (четвертий), так як база коліс двовісного візка більша за відстань між парами датчиків, і цей датчик через мультиплексор видає в блок ідентифікації сигнал "0", який є ознакою чотиривісного вагона. Сигнал для зважування другого візка видасться при проходженні першим її колесом (третім колесом вагона) робочої пари шляхових датчиків, а четверте колесо вагона формує сигнал установки, котрий приводить блок ідентифікації в початковий стан. Для тривісного візка шестивісного вагона сигнал на зважування видасться під час проходження другого колеса робочої пари шляхових датчиків, але при цьому останній (четвертий) шляховий датчик знаходиться під дією першого колеса, так як міжвісна відстань візка менша за відстань між парами датчиків. В блок ідентифікації від четвертого датчика надходить сигнал "1", який е ознакою шестивісного вагона. При наявності цієї ознаки сигнал приведення схеми в початковий стан формується після проходження робочої пари шляхових датчиків третім колесом візка. Другий візок шестивісного вагону зважується в тому ж положенні, що й перший. Таким чином, пристрій ідентифікує кожний вагон шляхом аналізу комбінацій стану шляхових датчиків, що знаходяться під дією визначених коліс (осей) візків вагона, а момент ідентифікації пов'язаний з визначенням моменту зважування візка, що підвищує надійність і точність пристрою для зважування вагонів, а також дозволяє зважування составів з чотири- і шестивісними вагонами. Суть винаходу пояснюється кресленнями, на яких зображені: фіг. 1 - функціональна схема пристрою; фіг. 2, 3, 4 - схема розміщення візків вагона відносно шляхових датчиків в момент формування сигналу зважування. До складу пристрою входять - вантажоприймальна платформа 1 на ваговимірювальних датчиках 2, з'єднаних через підсумовуючий блок З послідовно з аналого-цифровим перетворювачем (АЦП) 4 і обчислювальним блоком 5, що має на виході шину виводу даних, чотири шляхові датчики 6, 7, 8 і 9, розміщенні попарно симетрично відносно центру вантажоприймальної платформи 1 на відстані між парами датчиків 1800 мм, що менше відстані між осями двовісного візка чотиривісного вагона (1850 мм), але більше, ніж відстань між осями тривісного візка (1750 мм) шестивісного вагона; блок спряження 10, мультиплексор 11, вузол напрямку 12 і блок ідентифікації 13 до складу якого входять перший елемент АБО-НІ 14, перший формувач прямокутного імпульсу 15, D-тригер 16, регістр 17, другий формувач 18, другий, третій і 2 38561 четвертий елементи АБО-НІ 19, 20 і 21, елемент ІНІ 22, елемент НІ 23, два елемента І 24 та 25, елемент АБО 26, причому вихід блоку ідентифікації з'єднаний з керуючими входами АЦП 4 і обчислювального блоку 5. Пристрій працює таким чином. Сигнали ваговимірювальних датчиків 2 надходять в аналоговій формі в підсумовуючий блок 3, який видає сумарний сигнал на інформаційний вхід АЦП 4. АЦП 4 виконує вимірювання сигналу ваговимірювальних датчиків по команді блоку ідентифікації 14 і результат в цифровій формі передає в обчислювальний блок 5. Під час руху состава в напрямку стрілки, фіг. 1, вузол напрямку 12 в момент спрацьовування шляхового датчика б подає на керуючий вхід (А/В) м ультиплексора 11 сигнал "0", по якому до його виходів (1) і (2) підключається перша пара шляхових датчиків 6 і 7, та шляховий датчик 8, вихід (3). Датчик 9 при цьому в роботу не включається. Під час руху состава в зворотному напрямку на керуючий вхід (А/В) мультиплексора 11 вузол напрямку 12 подає сигнал “1”, який підключає до виходу (1) і (2) мультиплексора 11 шляхові датчики другої пари 8 і 10 і шляховий датчик 6, вихід (3). При цьому шляховий датчик 7 не приймає участі в роботі. В початковому положенні на виходах мультиплексора 11 сигнали "0", тому елемент АБО-НІ 13, D-тригер 16 та регістр 17, формувачі 15 і 18 не збуджені. На інверсних ви ходах D-тригера та регістра - сигнали "1". На входи др угого елемента АБО-НІ 19 подаються сигнали "1" з інверсного виходу D-тригера і виходу (3) регістра, а на входах третього елемента АБО-НІ 20 є сигнал "0" з прямого виходу D-тригера 16 і сигнал "1" з виходу (4) регістра 17. При цьому на входах четвертого елемента АБО-НІ 21 будуть сигнали "0" з виходів другого 19 і третього 20 елементів АБО-НІ, а на його виході - сигнал "1", який подасться на інверсні установочні входи R D-тригера і регістра. На входи елемента І-НІ 22 і елемента НІ 23 подаються сигнали "1" з ви ходів (2) і (3) регістра 17, і на їх ви ходах встановлюються сигнали "0", котрі закривають елементи І 24 та 25. Під час проходження колесом пари шляхових датчиків б і 7 їх сигнали проходять на виходи (1) і (2) мультиплексора 11, а по тому на входи елемента АБО-НІ 14, який видає сигнал "0" на вхід першого формувача 15. Під час з'їзду колеса з другого шляхового датчика 7 першої пари, фіг. 2, а на виході елемента АБО-НІ 14 появляється сигнал "1" і формувач 15 при переході від низького потенціалу до високого видає імпульс прямокутної форми. D-тригер 16 не реагує на цей імпульс, так як на вході D сигнал "0", регістр 17 і другий формувач 18 спрацьовують після закінчення імпульсу формувача 15, тобто при переході від високого потенціалу до низького. При цьому регістр видає сигнал "0" на виході (1), а др угий формувач 18 - прямокутний імпульс позитивної полярності. Оскільки вихід (1) регістра не задіяний, то стан елементів І 22 та 23 не змінюється і імпульс формувача 18 на вихід не проходить. Під час проходження другого колеса візка перший формувач 15 знову видає прямокутний імпульс, який зміщує регістр на одиницю, так що на його виході (2) появляється сигнал "0", і збуджує формувач 18. Якщо візок двовісний (чотиривісний вагон), то в цей час його перше колесо пройшло шляховий датчик 8, фіг. 3. так як відстань між датчиками 7 і 8 менша її міжвісної відстані. Тому датчик 8 видає сигнал "0" на вихід (3) мультиплексора 11 і, відповідно, на вхід D-тригера 16, який не змінює свого стану і надалі видає сигнал "0" на перший вхід др угого елемента І 25. З виходу (2) регістра 17 сигнал "0" надходить на перший вхід елемента І-НІ 22 та вхід елемента НІ 23, на виходах якого встановлюється сигнал "1". При цьому елемент І 24 відкритий і позитивний імпульс формувача 18 через нього і елемент АБО 26 надходить на керуючі входи АЦП 4 та обчислювального блоку 5. Обчислювальний блок по цьому сигналу запам'ятовує номер візка, а АЦП 4 проводить вимірювання ваги візка вагона і передає її в підсумовуючий вузол обчислювального блоку 5. При проходженні першим колесом другого візка (третє колесо вагона) пари шляхових датчиків 6 і 7 по імпульсу формувача 15 регістр 17 видає сигнал "0" з виходу (3) на другий вхід елемента ІНІ 22, на виході якого зберігається сигнал "1", і запускає формувач 18, позитивний імпульс якого передається через елементи І 24 та АБО 26 на входи АЦП 4 і обчислювального блоку 5. АЦП 4 виконує вимірювання ваги другого візка і передає її в обчислювальний блок 5, який підсумовує вагу другого візка з вагою першого, визначаючи вагу вагона, і формує сигнал порядкового номера вагона. Результати видаються на шину виводу інформації і далі, наприклад, на друкуючий пристрій. Імпульс, який видає формувач 15 при проходженні пари шляхови х да тчиків 6 і 7 четвертим колесом вагона, встановлює сигнал "0" на виході (4) регістра 17. При цьому на обох входах елемента І-НІ 22 встановлюються сигнали "1", а на виході - сигнал "0", який закриває елемент І 24, не пропускаючи імпульс формувача 18 на вихід. Крім того сигнал "0" з виходу (4) регістра подасться на другий вхід елемента АБО-НІ 20, на перший вхід якого надходить сигнал "0" з виходу D-тригера 16. Елемент АБО-НІ 20 видає сигнал 1 на вхід елемента АБОНІ 21, з виходу якого сигнал "0" надходить на установочні входи R D-тригера 16 і регістра 17, приводячи блок ідентифікації в початкове положення. Якщо візок тривісний (шестивісний вагон), то в момент сходу другого колеса з шляхового датчика 7 датчик 8 знаходиться під дією його першого колеса фіг. 4, так як відстань між цими датчиками більша, ніж відстань між осями тривісного візка. Сигнал "1" з датчика 8 через мультиплексор 11 надходить на D-вхід D-тригера, який спрацьовує по передньому фронту імпульсу формувача 15 на вході С. З інверсного виходу D-тригера сигнал "0" подається на перші входи елемента АБО-НІ 19 і елемента І 24, а з прямого виходу сигнал "1" - на перший вхід елемента І 25, на другому вході якого присутній сигнал "1" з виходу елемента НІ 23, що отримує сигнал "0" з виходу (2) регістра 17. Таким чином імпульс запуску формувача 18 на зважування першого візка надходить в АЦП 4 і обчислювальний блок 5 через елементи І 25 та АБО 26. Під час проходження третім колесом візка шляхових датчиків б і 7 на виході (2) регістра 17 появляється сигнал "1", який через елемент НІ 23 закриває елемент І 25, а на виході (3) регістра 17 - сиг 3 38561 нал "0", що приходить на другий вхід елемента АБО-НІ 19. На виході елемента АБО-НІ 19 встановлюється сигнал "1", а на виході елемента АБО-НІ 21 - сигнал "0", який встановлює по входу R Dтригер 16 і регістр 17 в початковий стан. Другий візок шестивісного вагону зважується так само, як перший. Обчислювальний блок підсумовує вагу першого і другого візків, визначаючи вагу вагона, і видає інформацію в зовнішній пристрій. В пристрої для зважування залізничних составів під час руху здійснює ідентифікацію (розпізна вання типу) кожного вагону шля хом аналізу комбінацій стану шля хових датчиків від дії коліс (осей) вагону, що знаходяться в визначеному положенні. При цьому формування ознаки типу вагона (сигналу ідентифікації) пов'язане з моментом зважування візка вагону, що виключає необхідність запам’ятовування даної ознаки. В результаті значно підвищена надійність і, відповідно, точність зважування під час руху вагонів і составів в цілому, а також є можливим зважування составів з різнотипними вагонами. Фіг. 1 4 38561 Фіг. 2 Фіг. 3 Фіг. 4 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for weighing railroad trains at motion
Автори англійськоюPavlets Oleksii Havrylovych, Lisovyi Vitalii Vasyliovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Chakov Oleksandr Mykolayovych
Назва патенту російськоюУстройство для взвешивания железнодорожных составов во время движения
Автори російськоюПавлец Алексей Гаврилович, Лисовый Виталий Васильевич, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Чаков Александр Николаевич
МПК / Мітки
МПК: G01G 19/04
Мітки: руху, пристрій, составів, залізничних, зважування
Код посилання
<a href="https://ua.patents.su/5-38561-pristrijj-dlya-zvazhuvannya-zaliznichnikh-sostaviv-pid-chas-rukhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зважування залізничних составів під час руху</a>
Пристрій для зважування залізничних вагонів під час руху
Номер патенту: 38424
Опубліковано: 15.05.2001
Автори: Лісовий Віталій Васильович, Раздобаров Віктор Георгійович, Чаков Олександр Миколайович, Сацюк Валерій Іванович, Павлець Олексій Гаврилович
МПК: G06F 7/00, G01G 19/04
Мітки: вагонів, залізничних, пристрій, руху, зважування
Формула / Реферат:
Пристрій для зважування залізничних вагонів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, підключеними через вхідний блок до аналого-цифрового перетворювача, вихід якого підключений до інформаційного входу обчислювального блоку, чотири шляхові датчики, що розташовані попарно симетрично відносно центру вантажоприймальної платформи, виходи яких через блок сполучення з'єднані з входами...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 12608
Опубліковано: 28.02.1997
Автори: Сільванський Микола Олександрович, Цимбалюк Анатолій Григорович, Нікітінський Михайло Павлович
МПК: G01G 19/04
Мітки: пристрій, составів, рухомих, залізничних, зважування
Формула / Реферат:
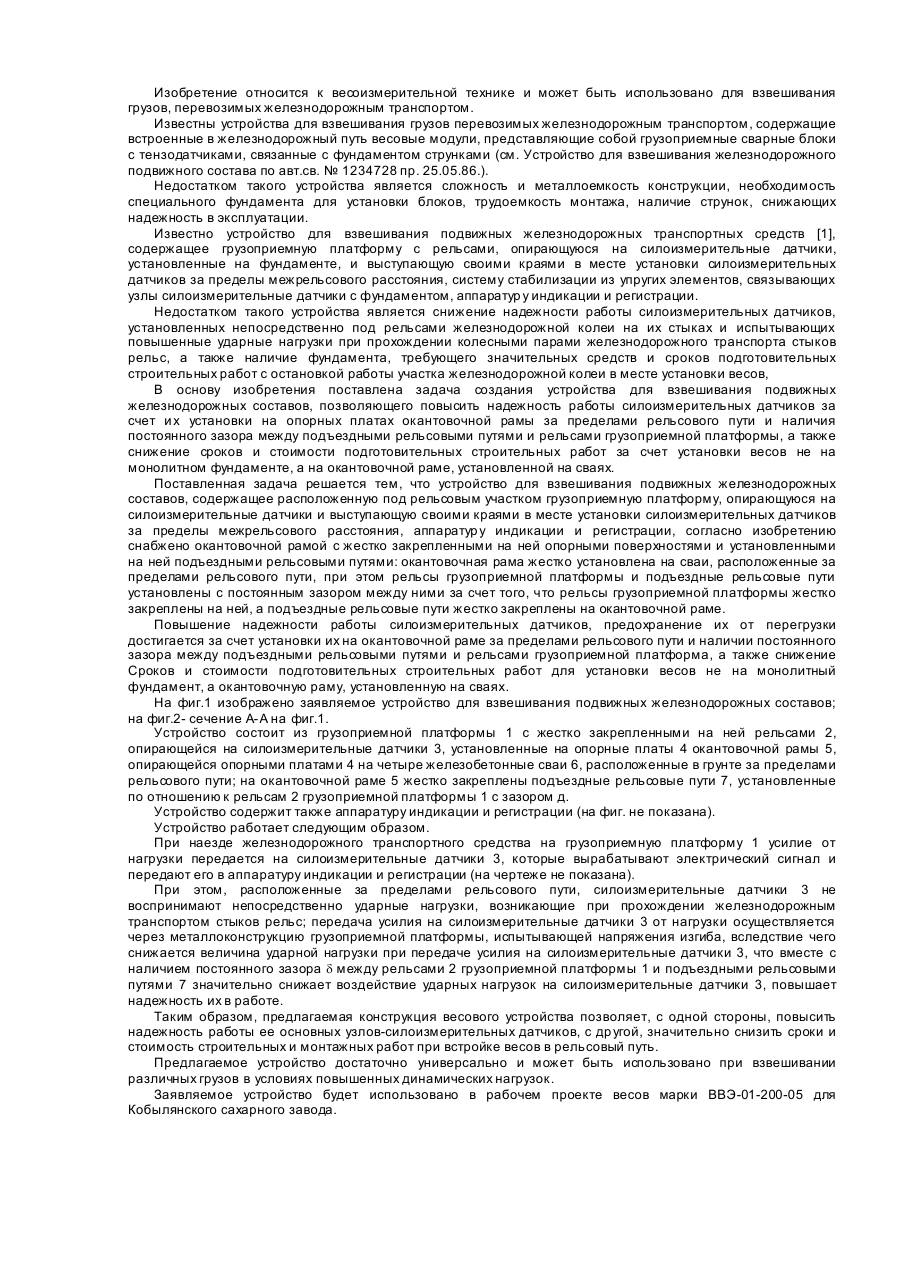
Устройство для взвешивания железнодорожных подвижных составов, содержащее расположенную под рельсовым участком грузоприемную платформу с рельсами, опирающуюся на силоизмерительные датчики и выступающую своими краями в месте установки силоизмерительных датчиков за пределы межрельсового расстояния, аппаратуру индикации и регистрации, отличающееся тем, что оно снабжено окантовочной рамой с жестко закрепленными опорными платами и...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 13900
Опубліковано: 25.04.1997
Автори: Цимбалюк Анатолій Григорович, Нікітінський Михайло Павлович, Сільванський Микола Олександрович
МПК: G01G 19/04
Мітки: залізничних, зважування, составів, пристрій, рухомих
Формула / Реферат:
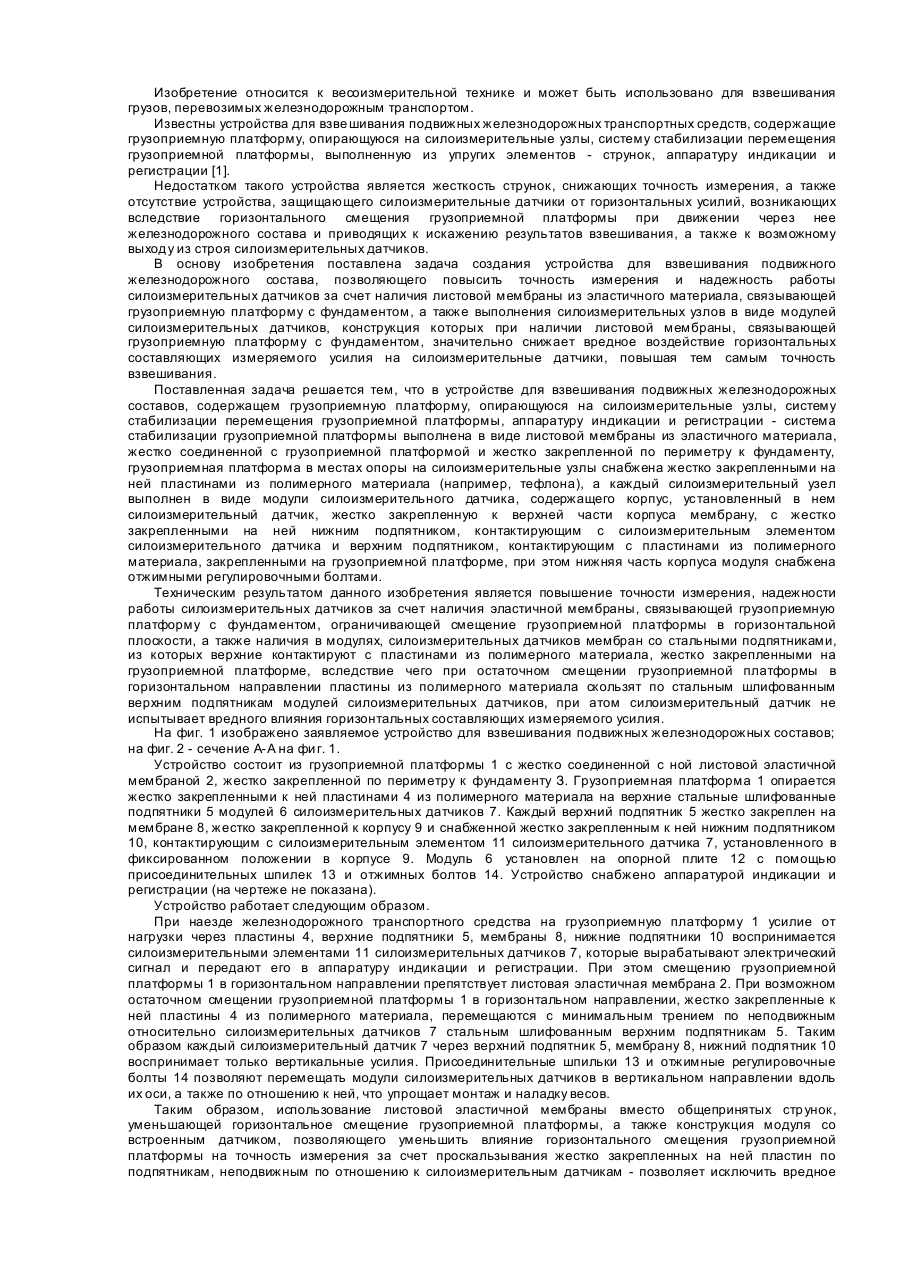
Устройство для взвешивания подвижных железнодорожных составов, содержащее грузоприемную платформу, опирающуюся на силоизмерительные узлы, систему стабилизации перемещения грузоприемной платформы, аппаратуру индикации и регистрации, отличающееся тем, что система стабилизации перемещения грузоприемной платформы выполнена в виде листовой эластичной мембраны, жестко соединенной с грузоприемной платформой и жестко закрепленной по периметру к...
Поїзд (варіанти) і транспортний засіб для формування залізничних составів або автопоїздів (варіанти)
Номер патенту: 29475
Опубліковано: 15.11.2000
Автор: Вікс Гаррі О.
Мітки: засіб, варіанти, формування, транспортний, автопоїздів, составів, поїзд, залізничних
Текст:
...тормозах пропорционально нагрузке, приложенной к пневматическим рессорным средствам, расположенные на линиях подвода воздуха и связанные с пневматическими рессорными средствами. Вышеперечисленные задачи и преимущества настоящего изобретения станут более ясными после рассмотрения нижеследующего более подробного описания со ссылкой на чертежи, на которых иллюстрируется предпочтительная форма настоящего изобретения: фиг.1 - вид сверху скла 7 ...
Ваговий прилад зважування тварин у руху
Номер патенту: 16026
Опубліковано: 29.08.1997
Автори: Дудка Олександр Андрійович, Бугайов Миколай Іванович
МПК: A01K 29/00, G01G 17/00
Мітки: руху, тварин, зважування, ваговий, прилад
Формула / Реферат:
Весовое устройство для взвешивания животных в движении, содержащее расположенную на основании грузоприемную платформу, связанную посредством рычажно-передаточного механизма с тензометрическим датчиком, элементом регулируемой жесткости, демпфером, а тензометрический датчик связан с блоком обработки информации, отличающееся тем, что, с целью повышения точности измерения массы движущегося животного, рычажно-передаточный механизм выполнен в...
Попередній патент: Вуглецевий електрод
Наступний патент: Пристрій для розвантаження кульшового суглоба та функціонального вправлення вивиху стегна
Випадковий патент: Спосіб одержання 6-бензилоксизаміщених ізопропілових ефірів beta-карболін-3-карбонової кислоти