Пристрій для зважування залізничних вагонів під час руху
Номер патенту: 38424
Опубліковано: 15.05.2001
Автори: Лісовий Віталій Васильович, Раздобаров Віктор Георгійович, Чаков Олександр Миколайович, Павлець Олексій Гаврилович, Сацюк Валерій Іванович


Формула / Реферат
Пристрій для зважування залізничних вагонів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, підключеними через вхідний блок до аналого-цифрового перетворювача, вихід якого підключений до інформаційного входу обчислювального блоку, чотири шляхові датчики, що розташовані попарно симетрично відносно центру вантажоприймальної платформи, виходи яких через блок сполучення з'єднані з входами мультиплексора, та вузла напрямку руху, який відрізняється тим, що в пристрій додатково введений блок розпізнавання осі, який містить елемент АБО-НІ , елемент НІ, два елемента І, елемент І-НІ, RS - тригер, D - тригер та два формувачі, причому перший вихід мультиплексора з'єднаний з першими входами елемента АБО-НІ, першого елемента І та входом елемента НІ, а другий вихід мультиплексора - з другими входами елемента АБО-НІ, першого елемента І та входом D D - тригера, вихід першого елемента І з'єднаний з входом S RS-тригера, вихід якого з'єднаний з першим входом другого елемента І, а його другий вхід підключений до виходу елемента НІ, вихід другого елемента І з'єднаний з входом С D-тригера, вихід якого з'єднаний з першим входом елемента І-НІ, другий вхід якого підключений до виходу елемента АБО-НІ, вихід елемента І-НІ з'єднаний з входом першого формувача, вихід якого з'єднаний з входом другого формувача і керуючими входами аналого-цифрового перетворювача і обчислювального блоку, вихід другого формувача з'єднаний з установочними входами R RS- тригера і D - тригера.
Текст
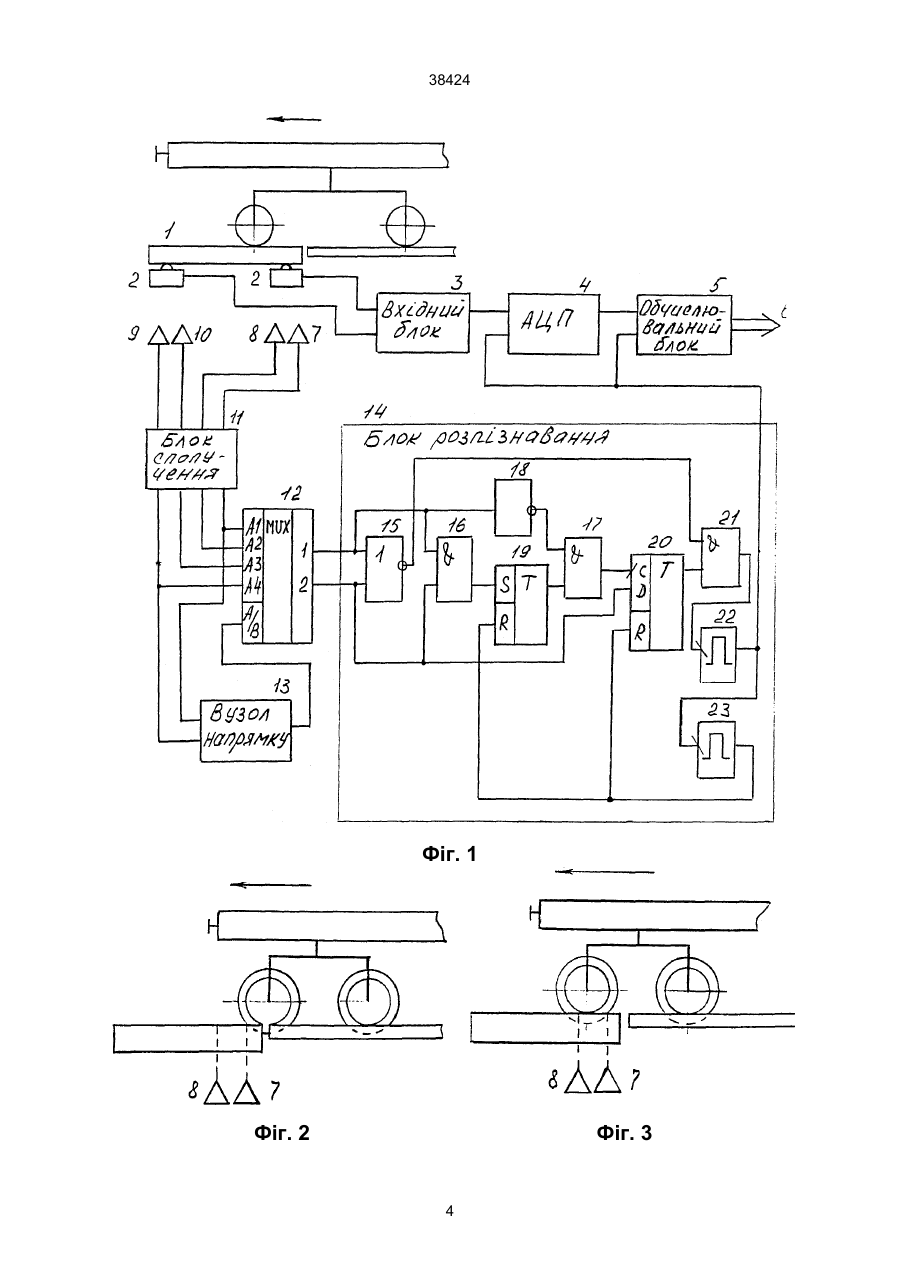
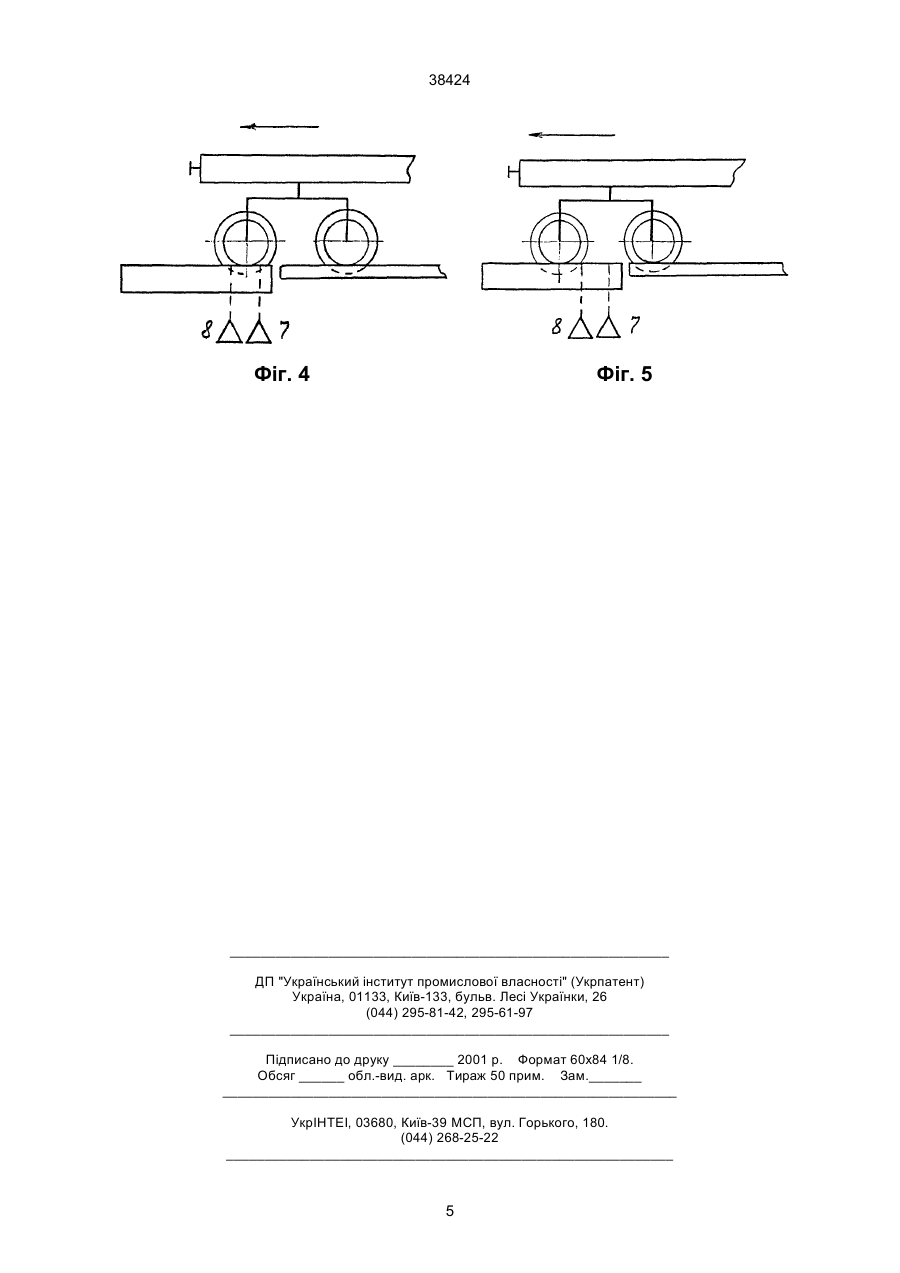
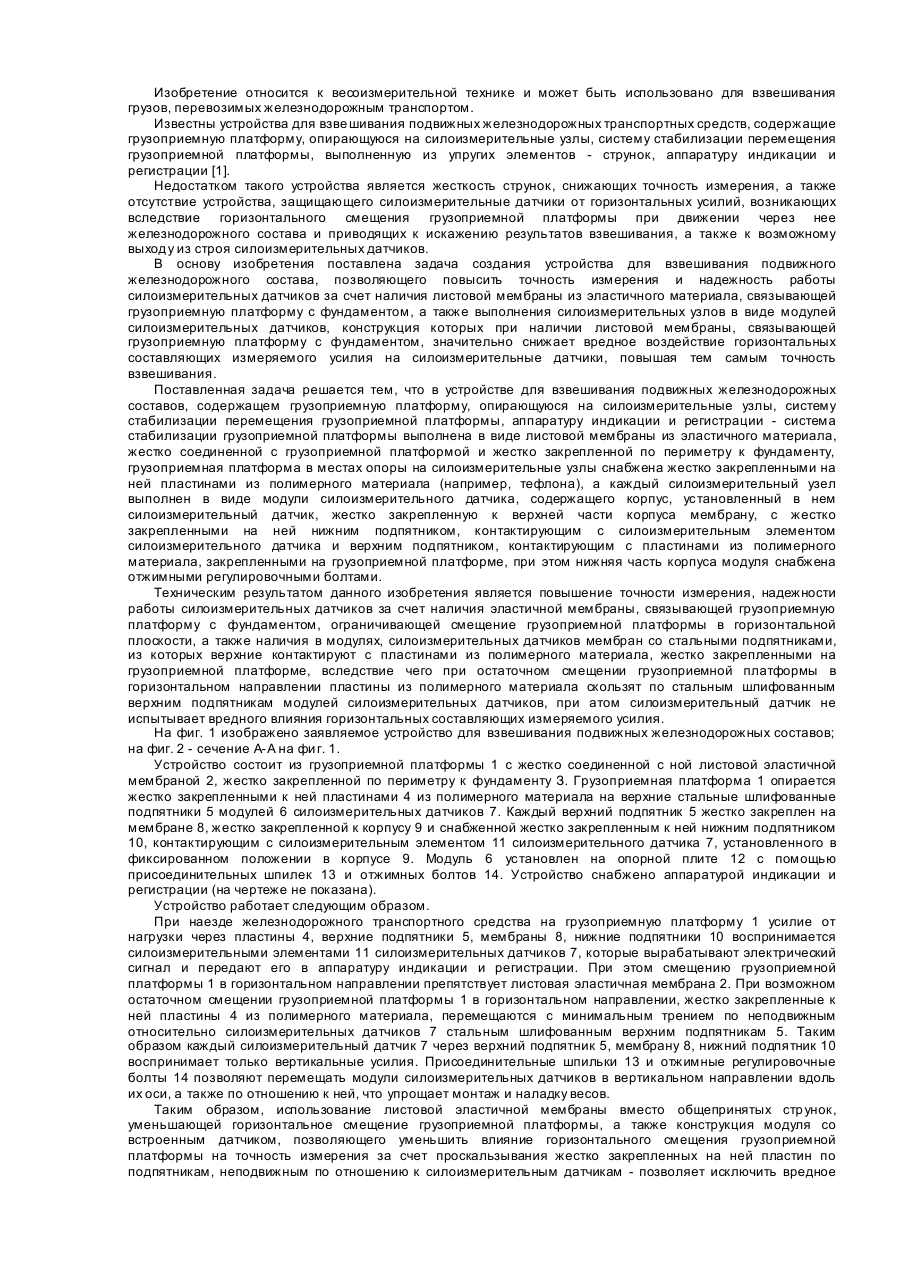
Пристрій для зважування залізничних вагонів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, підключеними через вхідний блок до аналого-цифрового перетворювача, вихід якого підключений до інформаційного входу обчислювального блоку, чотири шляхові датчики, що розташовані попарно симетрично відносно центру вантажоприймальної платформи, виходи яких через блок сполучення з'єднані з входами мультиплексора, та вузла напрямку руху, відрізняється тим 38424 що розташовані попарно симетрично відносно центру вантажоприймальної платформи, виходи яких через блок сполучення з'єднані з входами мультиплексора і вузла напрямку руху, передбачені такі відмінності - в пристрій додатково введений блок розпізнавання осі, який містить елемент АБО-НІ , елемент НІ, два елемента I , елемент IНІ, RS - тригер, D - тригер і два формувачі, причому перший вихід мультиплексора з'єднаний з першими входами елемента АБО-НІ, першого елемента I та входом елемента НІ, а другий вихід мультиплексора - з другими входами елемента АБО-НІ, першого елемента I та входом D D - тригера, вихід першого елемента I з'єднаний з входом S RSтригера, вихід якого з'єднаний з першим входом другого елемента І, а його другий вхід підключений до виходу елемента НІ, вихід другого елемента I з'єднаний з входом С D-тригера, вихід якого з'єднаний з першим входом елемента I-НІ, другий вхід якого підключений до виходу елемента АБО-НІ, вихід елемента I-НІ з'єднаний з входом першого формувача, вихід якого з'єднаний з входом другого формувача і керуючими входами аналогоцифрового перетворювача і обчислювального блоку, вихід другого формувача з'єднаний з установочними входами R RS- тригера і D - тригера; при цьому шляхові датчики в кожній парі розташовані в межах їх замикання одним колесом вагона. Між сукупністю ознак та досягнутим технічним результатом існує наступний причиннонаслідковий зв'язок. Вузол напрямку вводить в роботу пару шляхових датчиків, розташованих по ходу потягу, сигнали яких через блок сполучення і мультиплексор подаються в блок розпізнавання осі. Схема блоку розпізнавання забезпечує формування команди для зважування осі і рахунку осей по сигналах, що послідовно надійшли від першого шляхового датчика підключеної пари, від двох одночасно і, по тому, по послідовному звільненню першого і другого шляхових датчиків. Сигнал першого датчика проводить підготовку першого елемента I та елемента I-НІ. Хибний сигнал в лінії шляхових датчиків від можливих завад (наводок) може спричинити таку саму дію, але після його закінчення логічні елементи блоку розпізнавання повертаються до попереднього стану. Після спрацювання другого датчика готується D - тригер по входу D, послідовно спрацьовують перший елемент І та RS - тригер, який готує другий елемент І. Під час ввімкнення шляхових датчиків перешкоди не впливають на схему. З'їзд колеса з першого шляхового датчика викликає послідовне спрацьовування другого елемента I і D - тригера, який готує елемент I-НІ. Оскільки момент звільнення першого датчика супроводжується запам'ятовуванням цього стану Dтригером, то завада (наводка) в його лінії не може привести до змін у схемі блоку розпізнавання. Після проходження колесом другого шляхового датчика спрацьовує елемент I-НІ і збуджує перший формувач, який формує імпульсний сигнал в АЦП для виконання вимірювання маси осі та в обчислювальний блок для підрахунку осей. Після закінчення імпульсу збуджується другий формувач, який встановлює тригери у початковий стан. Таким чином досягається логічна обробка сигналів шляхових датчиків і за рахунок цього виклю чається дія перешкод на формування сигналу підрахунку осей та виконання вимірювання їх маси, завдяки чому підвищується надійність пристрою та точність визначення маси вагона і потягу. Суть винаходу пояснюється кресленнями, на яких зображені: Фіг. 1. Функціональна схема пристрою. Фіг. 2. Схема наїзду колеса вагону на перший шляховий датчик. Фіг. 3. Схема наїзду колеса вагону на перший і другий шляхові датчики. Фіг. 4. Схема з’їзду колеса вагону з першого шляхового датчика. Фіг. 5. Схема з'їзду колеса вагону з другого шляхового датчика. Пристрій складається з вантажоприймальної платформи 1 на ваговимірювальних датчиках 2, з'єднаних через вхідний блок 3 з входом аналогоцифрового перетворювача (АЦП) 4, вихід якого з'єднаний з інформаційним входом обчислювального блоку 5 з шиною виводу інформації 6, до якої може бути підключений друкуючий пристрій і т.п.: чотири шляхові датчики 7, 8, 9 і 10, які розміщені попарно симетрично відносно центру платформи, причому відстань між датчиками в кожній парі залежить від можливості їх замикання одним колесом (віссю) вагона, а їх виходи під'єднані через блок сполучення 11 до мультиплексора 12 і вузла визначення напрямку руху 13, вихід якого з'єднаний з керуючим входом мультиплексора 12, виходи (1) і (2) мультиплексора з'єднані з блоком розпізнавання осі 14, до складу якого входять елемент АБО-НІ 15, два елемента І 16 та 17, елемент НІ 18, RS - тригер 19, D - тригер 20, елемент І-НІ 21 та два формувача імпульсів прямокутної форми 22 і 23, вихід блоку розпізнавання 14 з'єднаний з керуючими входами АЦП 4 та обчислювального блоку 5. Пристрій працює наступним чином. Сигнали ваговимірювальних датчиків 2 в аналоговій формі обробляються і підсумовуються вхідним блоком 3 та надходять в АЦП 4, який проводить їх вимірювання по сигналу (команді) блока розпізнавання 14 і передає результат у цифровій формі в обчислювальний блок 5. Під час руху вагонів (потяту) в напрямку стрілки, фіг. 1, спрацьовує шляховий датчик 7 і вузол напрямку 13 видає на керуючий вхід А/В мультиплексора 12 сигнал "0” по якому до виходів (1) і (2) мультиплексора під'єднуються шляхові датчики 7 і 8, а датчики 9 і 10 відключаються. При зворотному напрямку руху першим спрацьовує шляховий датчик 9 і вузол напрямку 13 видає в мультиплексор 12 сигнал "1", який підключає до його виходів (1) і (2) датчики 9 і 10, відключаючи датчики 7 і 8. В початковому положенні (до спрацьовування шляхових датчиків) на виходах (1) і (2) мультиплексора встановлюються сигнали “0", завдяки чому виходи елементів АБО-НІ 15, HI 18 та І-НІ 21 знаходяться в стані "І", а виходи решти елементів 16, 17, 19, 20, 22, 23 блока розпізнавання - в стані "0". Під час наїзду колеса вагона на перший шляховий датчик 7, (Фіг. 2,) його сигнал через блок сполучення 11 надходить на мультиплексор 12, на виході (1) якого встановлюється сигнал "1", а на елементах АБОНІ 15 та НІ 18 - сигнали "0”, які надходять на перший вхід елемента І-НІ 21 та другий вхід елемента І 17 відповідно. Стан решти елементів блоку розпі 2 38424 знавання 14 не змінюється. При наїзді колеса вагона на другий шляховий датчик 8, (Фіг. 3,) на обох виходах (1) і (2) мультиплексора і, відповідно, на вході D D - тригера 20 будуть сигнали "1". При цьому спрацьовують послідовно елемент І 16 та RS - тригер, з виходу якого сигнал "1"' надходить на перший вхід елемента I 17, готуючи його до спрацьовування. Після з'їзду колеса з шляхового датчика 7 (Фіг. 4,) на виході (1) мультиплексора встановлюється сигнал "0", а на виході НІ 18 - сигнал "1", який викликає послідовне спрацьовування елемента І 17 та D - тригера по входу С. З виходу D - тригера сигнал "1” подається на другий вхід елемента І-НІ. Після з'їзду колеса з шляхового датчика 8, (Фіг. 3,) на виході (2) мультиплексора 12 встановлюється сигнал "0", що викликає зміну стану елемента АБО-НІ 15, з виходу якого сигнал "1' надходить на перший вхід елемента І-НІ 18 і він переходить до стану "0", що викликає спрацьовування формувача 22, який видає імпульс позитивної полярності (сигнал "1") в АЦП 4. обчислювальний блок 3 та на другий формувач 23. По цьому сигналу АЦП 4 проводить вимірювання маси осі та передає результат на інформаційний вхід обчислювального блока 5, який виконує підсумовування маси та підрахунок осей в межах їх числа в вагоні. Після закінчення імпульса формувача 22, спра цьовує формувач 23, імпульс з виходу якого встановлює RS- тригер і D - тригер по входах R в нульовий стан і пристрій повертається у вихідне положення до під'їзду наступного колеса (осі) вагона. Після визначення маси вагона обчислювальний блок виводить на друкуючий пристрій дані про масу вагона, його порядковий номер і інш. Хибні сигнали в лінії будь-якого шляхового датчика не приводять схему блока розпізнавання в робочий стан, при якому формується вихідний сигнал. Щоб отримати вихідний сигнал блоку розпізнавання, що використовується для підрахунку осей і запуску аналого-цифрового перетворювача для вимірювання маси, необхідне послідовне спрацьовування першого по ходу потяга шляхового датчика, потому одночасне спрацьовування пари шляхових датчиків та послідовне вивільнення першого та другого датчика. Малоймовірно, що перешкоди можуть з'явитись в такій послідовності по двох каналах пари шляхових датчиків. Таким чином в запропонованому пристрої запобігається виникнення помилок в підрахунку осей вагонів та помилкове вимірювання маси осі від дії механічних перешкод на шляхові датчики та від електромагнітних наводок в їх лініях зв'язку. В результаті вагомо підвищена надійність і точність вимірювання маси вагона та потягу в цілому. 3 38424 Фіг. 1 Фіг. 2 Фіг. 3 4 38424 Фіг. 4 Фіг. 5 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 5
ДивитисяДодаткова інформація
Назва патенту англійськоюAppliance for weighing railroad cars at motion
Автори англійськоюPavlets Oleksii Havrylovych, Lisovyi Vitalii Vasyliovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Chakov Oleksandr Mykolayovych
Назва патенту російськоюУстройство для взвешивания железнодорожных вагонов во время движения
Автори російськоюПавлец Алексей Гаврилович, Лисовый Виталий Васильевич, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Чаков Александр Николаевич
МПК / Мітки
МПК: G01G 19/04, G06F 7/00
Мітки: руху, пристрій, зважування, залізничних, вагонів
Код посилання
<a href="https://ua.patents.su/5-38424-pristrijj-dlya-zvazhuvannya-zaliznichnikh-vagoniv-pid-chas-rukhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для зважування залізничних вагонів під час руху</a>
Пристрій для зважування рухомих залізничних составів
Номер патенту: 13900
Опубліковано: 25.04.1997
Автори: Цимбалюк Анатолій Григорович, Сільванський Микола Олександрович, Нікітінський Михайло Павлович
МПК: G01G 19/04
Мітки: зважування, рухомих, составів, залізничних, пристрій
Формула / Реферат:
Устройство для взвешивания подвижных железнодорожных составов, содержащее грузоприемную платформу, опирающуюся на силоизмерительные узлы, систему стабилизации перемещения грузоприемной платформы, аппаратуру индикации и регистрации, отличающееся тем, что система стабилизации перемещения грузоприемной платформы выполнена в виде листовой эластичной мембраны, жестко соединенной с грузоприемной платформой и жестко закрепленной по периметру к...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 12608
Опубліковано: 28.02.1997
Автори: Цимбалюк Анатолій Григорович, Нікітінський Михайло Павлович, Сільванський Микола Олександрович
МПК: G01G 19/04
Мітки: составів, рухомих, залізничних, зважування, пристрій
Формула / Реферат:
Устройство для взвешивания железнодорожных подвижных составов, содержащее расположенную под рельсовым участком грузоприемную платформу с рельсами, опирающуюся на силоизмерительные датчики и выступающую своими краями в месте установки силоизмерительных датчиков за пределы межрельсового расстояния, аппаратуру индикации и регистрации, отличающееся тем, что оно снабжено окантовочной рамой с жестко закрепленными опорными платами и...
Пристрій для вимірювання зсуву коліс залізничних вагонів
Номер патенту: 34501
Опубліковано: 15.03.2001
Автори: Лопес Гомес Хосе, Лоренте Касадо Хосе
МПК: G01B 7/28, G01B 5/24, G01B 5/20, B61K 9/00, G01B 21/20
Мітки: залізничних, коліс, пристрій, вагонів, зсуву, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання зсуву коліс залізничних вагонів, який включає ковзну основу, напрямну рейку, засоби вимірювання, систему комп’ютерної обробки одержаних сигналів та їх візуального відображення на екрані монітора, який відрізняється тим, що він додатково включає рампу, яка займає зовнішню позицію відносно напрямної рейки і утворює з нею кут 45°, і сталеву плиту, а засоби вимірювання включають основу з розміщеною на ній опорною...
Пристрій для вивантаження сипучих матеріалів з критих залізничних вагонів
Номер патенту: 4932
Опубліковано: 28.12.1994
Автори: Твердохлібов Леонід Володимирович, Ціпоркіс Ала Рудольфівна, Гармаш Іван Андрійович, Савві Олександр Карлович, Апраксін Олексій Сергійович, Петров Дмитро Олександрович, Коган Григорій Леонідович, Штільман Георгій Моісійович
МПК: B65G 67/28
Мітки: сипучих, матеріалів, залізничних, вагонів, вивантаження, пристрій, критих
Формула / Реферат:
1. Устройство для выгрузки сыпучих материалов из крытых железнодорожных вагонов, содержащее подвижную вдоль вагона платформу с тележкой, установленной с возможностью перемещения в направляющих, расположенных перпендикулярно продольной оси вагона, и несущей скребковый цепной конвейер с подвижной кареткой, и скребковые конвейеры-питатели, состоящие из шарнирно соединенных между собой секций, отличающееся тем, что, с целью повышения...
Залізничні вагі для поосного зважування вагонів, що рухаються
Номер патенту: 23814
Опубліковано: 16.06.1998
Автор: Сухінін Віктор Олександрович
МПК: G01G 19/04
Мітки: поосного, вагонів, ваги, зважування, залізничні, рухаються
Формула / Реферат:
Железнодорожные весы для поосного взвешивания вагонов в движении, содержащие окантовочную раму с опорными поверхностями, расположенную в окантовочной раме грузоприемную платформу, опирающуюся на силоизмерительные датчики, аппаратуру индикации и регистрации, отличающиеся тем, что жестко связанные между собой опорные части окантовочной рамы на участках наезда вагона на грузоприемную платформу и съезда с нее, выполнены длиной не менее межосевого...
Наступний патент: Обрамлення отворів у цегляних стінах сейсмостійких будинків
Випадковий патент: Тепловий двигун