Пристрій для контролю положення петлі полоси в компенсаторі петлі безперервного травильного агрегату
Номер патенту: 68034
Опубліковано: 15.07.2004
Автори: Раздобаров Віктор Георгійович, Чаков Олександр Миколайович, Богомольний Леонід Михайлович, Сацюк Валерій Іванович, Супрун Олексій Олексійович, Добровольский Сергій Едуардович

Формула / Реферат
Пристрій для контролю положення петлі полоси в компенсаторі петлі безперервного травильного агрегату, що містить датчики верхнього і нижнього рівня петлі, блок формування керуючих сигналів, вузол видачі команд, який відрізняється тим, що датчики рівня петлі полоси встановлені в точках найбільшого провисання полоси на верхньому і нижньому заданих рівнях відповідно; блок формування керуючих сигналів складається з двох вузлів обробки сигналів датчиків верхнього і нижнього рівня петлі, кожний з яких містить вхідний формувач, елемент затримки, елемент І і підсилювач; причому датчики верхнього і нижнього рівня петлі з'єднані з вхідними формувачами відповідного вузла обробки сигналів, вихід формувача з'єднаний із входом елемента затримки і першим входом елемента І, другий вхід якого підключений до виходу елемента затримки, вихід елемента І з'єднаний із входом підсилювача, виходи підсилювачів обох вузлів обробки сигналів з'єднані з входами вузла видачі команд.
Текст
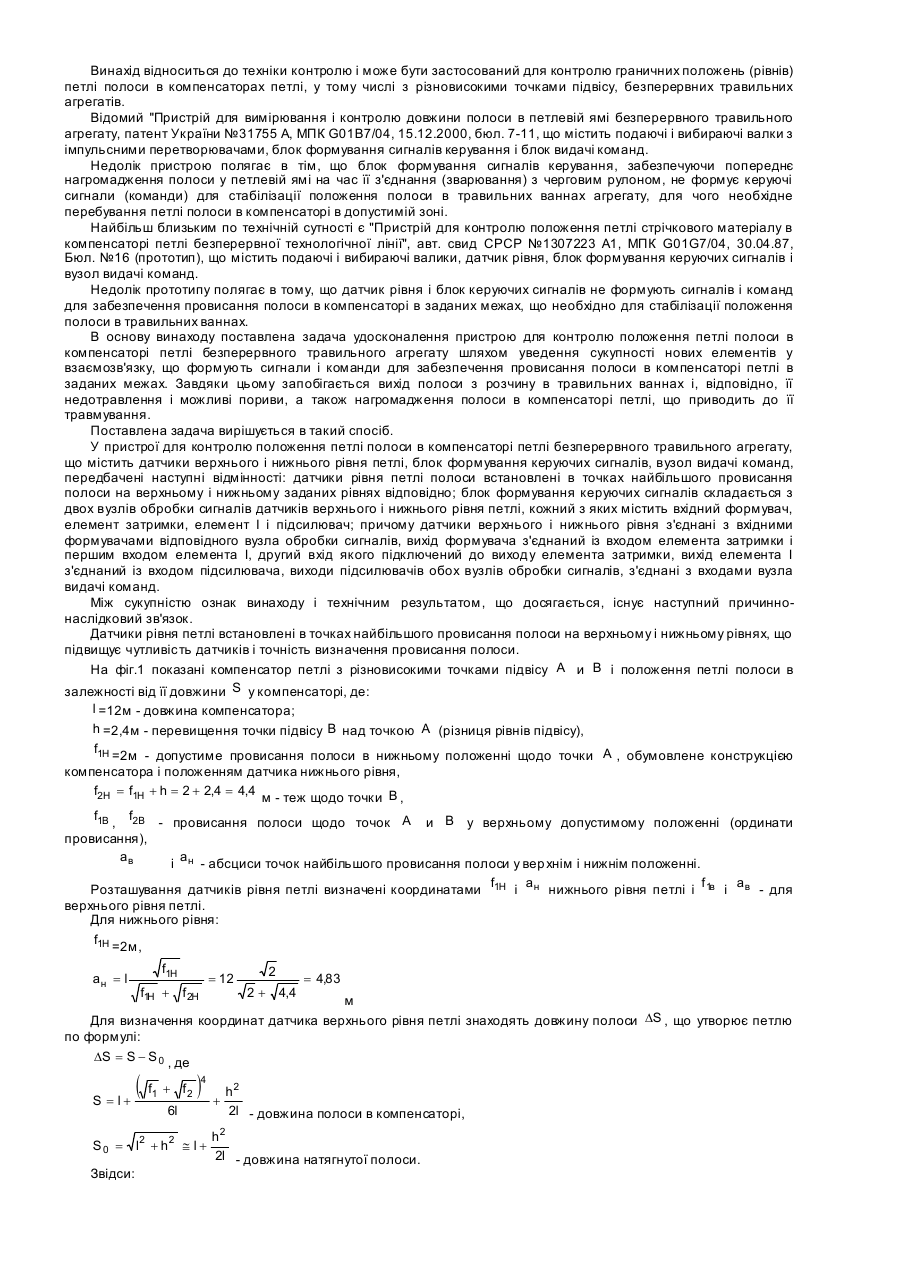
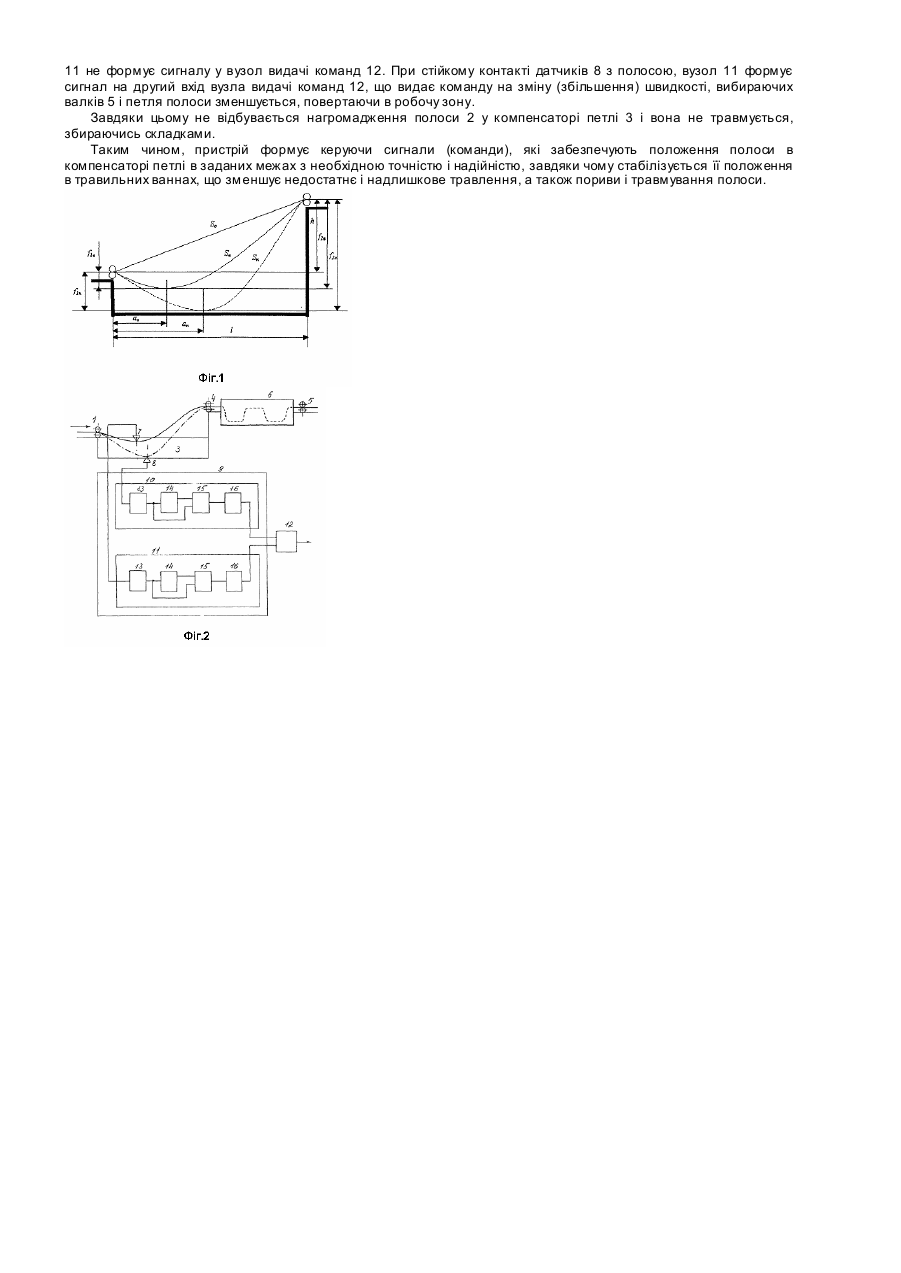
Винахід відноситься до техніки контролю і може бути застосований для контролю граничних положень (рівнів) петлі полоси в компенсаторах петлі, у тому числі з різновисокими точками підвісу, безперервних травильних агрегатів. Відомий "Пристрій для вимірювання і контролю довжини полоси в петлевій ямі безперервного травильного агрегату, патент України №31755 А, МПК G01В7/04, 15.12.2000, бюл. 7-11, що містить подаючі і вибираючі валки з імпульсними перетворювачами, блок формування сигналів керування і блок видачі команд. Недолік пристрою полягає в тім, що блок формування сигналів керування, забезпечуючи попереднє нагромадження полоси у петлевій ямі на час її з'єднання (зварювання) з черговим рулоном, не формує керуючі сигнали (команди) для стабілізації положення полоси в травильних ваннах агрегату, для чого необхідне перебування петлі полоси в компенсаторі в допустимій зоні. Найбільш близьким по технічній сутності є "Пристрій для контролю положення петлі стрічкового матеріалу в компенсаторі петлі безперервної технологічної лінії", авт. свид СРСР №1307223 А1, МПК G01G7/04, 30.04.87, Бюл. №16 (прототип), що містить подаючі і вибираючі валики, датчик рівня, блок формування керуючих сигналів і вузол видачі команд. Недолік прототипу полягає в тому, що датчик рівня і блок керуючих сигналів не формують сигналів і команд для забезпечення провисання полоси в компенсаторі в заданих межах, що необхідно для стабілізації положення полоси в травильних ваннах. В основу винаходу поставлена задача удосконалення пристрою для контролю положення петлі полоси в компенсаторі петлі безперервного травильного агрегату шляхом уведення сукупності нових елементів у взаємозв'язку, що формують сигнали і команди для забезпечення провисання полоси в компенсаторі петлі в заданих межах. Завдяки цьому запобігається вихід полоси з розчину в травильних ваннах і, відповідно, її недотравлення і можливі пориви, а також нагромадження полоси в компенсаторі петлі, що приводить до її травмування. Поставлена задача вирішується в такий спосіб. У пристрої для контролю положення петлі полоси в компенсаторі петлі безперервного травильного агрегату, що містить датчики верхнього і нижнього рівня петлі, блок формування керуючих сигналів, вузол видачі команд, передбачені наступні відмінності: датчики рівня петлі полоси встановлені в точках найбільшого провисання полоси на верхньому і нижньому заданих рівнях відповідно; блок формування керуючих сигналів складається з двох вузлів обробки сигналів датчиків верхнього і нижнього рівня петлі, кожний з яких містить вхідний формувач, елемент затримки, елемент І і підсилювач; причому датчики верхнього і нижнього рівня з'єднані з вхідними формувачами відповідного вузла обробки сигналів, вихід формувача з'єднаний із входом елемента затримки і першим входом елемента І, другий вхід якого підключений до виходу елемента затримки, вихід елемента І з'єднаний із входом підсилювача, виходи підсилювачів обох вузлів обробки сигналів, з'єднані з входами вузла видачі команд. Між сукупністю ознак винаходу і технічним результатом, що досягається, існує наступний причиннонаслідковий зв'язок. Датчики рівня петлі встановлені в точках найбільшого провисання полоси на верхньому і нижньому рівнях, що підвищує чутливість датчиків і точність визначення провисання полоси. На фіг.1 показані компенсатор петлі з різновисокими точками підвісу A и B і положення петлі полоси в залежності від її довжини S у компенсаторі, де: l =12м - довжина компенсатора; h =2,4м - перевищення точки підвісу B над точкою A (різниця рівнів підвісу), f1H =2м - допустиме провисання полоси в нижньому положенні щодо точки A , обумовлене конструкцією компенсатора і положенням датчика нижнього рівня, f2H = f1H + h = 2 + 2,4 = 4,4 м - теж щодо точки B , f1B , f2B - провисання полоси щодо точок A и B у верхньому допустимому положенні (ординати провисання), aв і ан - абсциси точок найбільшого провисання полоси у вер хнім і нижнім положенні. Розташування датчиків рівня петлі визначені координатами f1H і ан нижнього рівня петлі і f 1в і ав - для верхнього рівня петлі. Для нижнього рівня: f1H =2м, aн = l f1H = 12 f1H + f 2H 2 2 + 4,4 = 4,83 м Для визначення координат датчика верхнього рівня петлі знаходять довжину полоси DS , що утворює петлю по формулі: DS = S - S 0 , де S = l+ (f 1 + f2 4 6l 2 S0 = l + h Звідси: ) 2 @ l+ + h2 2l - довжина полоси в компенсаторі, h2 2l - довжина натягнутої полоси. (f DS = + f2 1 ) 4 6l (1) Довжина петлі на нижньому рівні DS н дорівнює: (f = + f 2H ) =( 2+ ) 4 4 4,4 DS н = 2,11 6l 6 × 12 м Довжину петлі на верхньому рівні з урахуванням можливості відпрацьовування сигналу датчика петлі верхнього рівня до повної вибірки полоси вибирають у межах: æ 1 1ö 1 DSB = ç ... ÷ × DS = × 2,11 @ 0 ,7 4 3ø 3 è м 1 H З рівнення (1), з врахуванням f2B = f1B + h , знаходимо провисання f1B (ординату положення датчика): f1B = 6l × D SB 4 + h 2 4 × 6 l × DSB h 2 , чи 6 × 12 × 0,7 2,42 2,4 f1B = + = 0,78 4 2 4 × 6 × 12 × 0,7 м. При цьому абсциса положення датчика верхнього рівня дорівнює: ан = l f1B f1B + f2B = 12 0,78 0,78 + 0,78 + 2,4 = 3,97 м Через нерівномірність руху полоси в травильному агрегаті (стрибки напруги живлення двигунів валків, тертя у ваннах і на переходах і т.д.) полоса в компенсаторі коливається у вертикальному напрямку. При цьому мають місце короткочасні контакти з датчиками рівня, коли полоса в цілому знаходиться в зоні регулювання ( f1H - f1B ). Для виключення помилкового спрацьовування кожен датчик через вхідний формувач з'єднаний з елементом затримки та елементом І, на другий вхід елемента І сигнал від датчика надходить через елемент затримки, що блокує видачу команди на зміну швидкості валків при короткочасних контактах полоси з датчиками в результаті коливань, завдяки чому підвищена надійність і стабільність пристрою. Аналогічно визначають координати провисання полоси на верхньому і нижньому рівнях у компенсаторі з рівновисокими точками підвісу. Технічний результат винаходу полягає у формуванні керуючих сигналів для забезпечення положення петлі полоси в компенсаторі петлі в заданих межах з необхідною точністю і надійністю, завдяки чому стабілізоване положення полоси в травильних ваннах, що запобігає поривам і травмуванню полоси та нормалізує її травлення. Сутність винаходу пояснюється кресленням, на якому зображені: Фіг.2 Функціональна схема пристрою для контролю положення полоси в компенсаторі петлі. Пристрій містить валки 1, що подають полосу 2 у компенсатор петлі 3 з різновисокими точками підвісу, опорні валки 4, вибираючі валки 5, що протягають полосу через травильні та промивні ванни 6 і компенсатор петлі, датчик 7 верхнього допустимого рівня петлі, датчик 8 нижнього допустимого рівня петлі, блок формування керуючих сигналів 9, який складається з двох вузлів обробки сигналів 10 і 11 датчиків верхнього і нижнього рівня петлі відповідно, і вузол видачі команд 12. Кожен вузол обробки сигналів містить вхідний формувач 13, елемент затримки 14, елемент І 15, підсилювач 16, причому кожний датчик рівня підключений до вхідного формувача 13 відповідного блоку обробки сигналів, вихід формувача 13 з'єднаний із входом елемента затримки 14 і першим входом елемента І 15, другий вхід елемента І 15 підключений до виходу вузла затримки 14, вихід елемента І 15 з'єднаний із входом підсилювача 16; виходи підсилювачів 16 обох вузлів обробки сигналів з'єднані з входом вузла видачі команд 12. Пристрій працює наступним чином. У вихідному (робочому) стані петля полоси займає проміжне положення між допустимими верхніми і нижніми точками провисання, тобто в зоні f1H - f1B = f 2H - f 2B , мал. 1. При цьому полоса не має контактів з датчиками рівнів і елементи 13...16 вузлів обробки сигналів 10 і 11 блоку формування керуючих сигналів 9 мають на виходах сигнали "0". Полоса 2 переміщається вибираючими валками 5 з компенсатору петлі 3 через опорні ролики 4 верхнього рівня та в травильних ваннах 6. При зменшенні швидкості подаючих валків 1 чи збільшенні швидкості вибираючих валків 5, наприклад через коливання напруги мережі живлення, зміни опору полоси 2 руху і т.п., величина петлі, тобто довжина полоси 2 у компенсаторі петлі зменшується, і полоса 2 вступає в контакт із датчиком верхнього рівня 7, що видає сигнал на вхідний формувач 13 вузла обробки сигналу 10. Вхідний формувач 13 забезпечує гальванічну розв'язку ланцюга датчика 7 і ланцюгів наступних елементів і формує сигнал необхідного рівня (0,1), сигнал вхідного формувача 13 надходить на вхід елемента затримки 14 і перший вхід елемента І 15. При короткочасному контакті полоси 2 з датчиком 7 через вертикальні коливання з періодом, наприклад, 0,2...0,3 с елемент затримки 14 не спрацьовує і вузол обробки 10 не видає сигналів. Якщо час контакту датчика верхнього рівня 7 з полосою 2 перевищує період коливання полоси, елемент затримки 14 видає сигнал "1" на другий вхід елемента І 15, що через підсилювач 16 видає сигнал "1" на перший вхід вузла видачі команд 12. Вузол видачі команд 12 видає команди на зміну швидкості валків, наприклад на зменшення швидкості вибираючих валків 5, і при цьому полоса 2 збільшує петлю, відходячи від датчика 7. Завдяки цьому полоса не натягається і не змінює глибини занурення в травильних ваннах, запобігається можливість пориву полоси. Аналогічна обробка сигналів відбувається при контакті смуги 2 з датчиком 8 нижнього рівня. Якщо контакт датчиків 8 з полосою 2 виникає через вертикальні коливання, тобто є короткочасним, то вузол обробки сигналів 11 не формує сигналу у вузол видачі команд 12. При стійкому контакті датчиків 8 з полосою, вузол 11 формує сигнал на другий вхід вузла видачі команд 12, що видає команду на зміну (збільшення) швидкості, вибираючих валків 5 і петля полоси зменшується, повертаючи в робочу зону. Завдяки цьому не відбувається нагромадження полоси 2 у компенсаторі петлі 3 і вона не травмується, збираючись складками. Таким чином, пристрій формує керуючи сигнали (команди), які забезпечують положення полоси в компенсаторі петлі в заданих межах з необхідною точністю і надійністю, завдяки чому стабілізується її положення в травильних ваннах, що зменшує недостатнє і надлишкове травлення, а також пориви і травмування полоси.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for monitoring the position of a stripe loop in the compensator of a continuous pickling unit
Автори англійськоюDobrovolskyi Serhii Eduardovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Chakov Oleksandr Mykolayovych, Bohomolnyi Leonid Mykhailovych
Назва патенту російськоюУстройство для контроля положения петли полосы в компенсаторе непрерывной травильной установки
Автори російськоюДобровольский Сергей Эдуардович, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Чаков Александр Николаевич, Богомольный Леонид Михайлович
МПК / Мітки
Мітки: компенсаторі, петлі, травильного, безперервного, агрегату, пристрій, положення, полоси, контролю
Код посилання
<a href="https://ua.patents.su/3-68034-pristrijj-dlya-kontrolyu-polozhennya-petli-polosi-v-kompensatori-petli-bezperervnogo-travilnogo-agregatu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю положення петлі полоси в компенсаторі петлі безперервного травильного агрегату</a>
Пристрій для вимірювання і контролю довжини полоси в петлевій ямі безперервного травильного агрегату
Номер патенту: 31755
Опубліковано: 15.12.2000
Автори: Раздобаров Віктор Георгійович, Чаков Олександр Миколайович, Телюк Віктор Григорович, Поляков Сергій Максимович, Сацюк Валерій Іванович, Лісовий Віталій Васильович, Резнік Олександр Олександрович
МПК: G01B 7/02
Мітки: безперервного, агрегату, ямі, пристрій, довжини, контролю, полоси, травильного, петлевій, вимірювання
Текст:
...полоси в петлевій ямі більше ста метрів , що буває при зупинці вибираючих валків по технологічним причинам , з допомогою схеми АБО блокується подача команд на зупинку вибираючих валків , поки довжина полоси не досягне ЗО м . Таким чином в петлевій ямі пристрій автоматично підтримує потрібну довжину полоси , що знижує травмування полоси та попереджує її розриви . Суть винаходу пояснюється кресленням на якому зображено : фіг. . Функціональна...
Пристрій для контролю положення гостряка стрілочного переводу
Номер патенту: 67532
Опубліковано: 15.06.2004
Автори: Кізяков Валер'ян Якович, Парфьонов Володимир Іванович
МПК: B61L 5/00
Мітки: контролю, стрілочного, пристрій, положення, переводу, гостряка
Формула / Реферат:
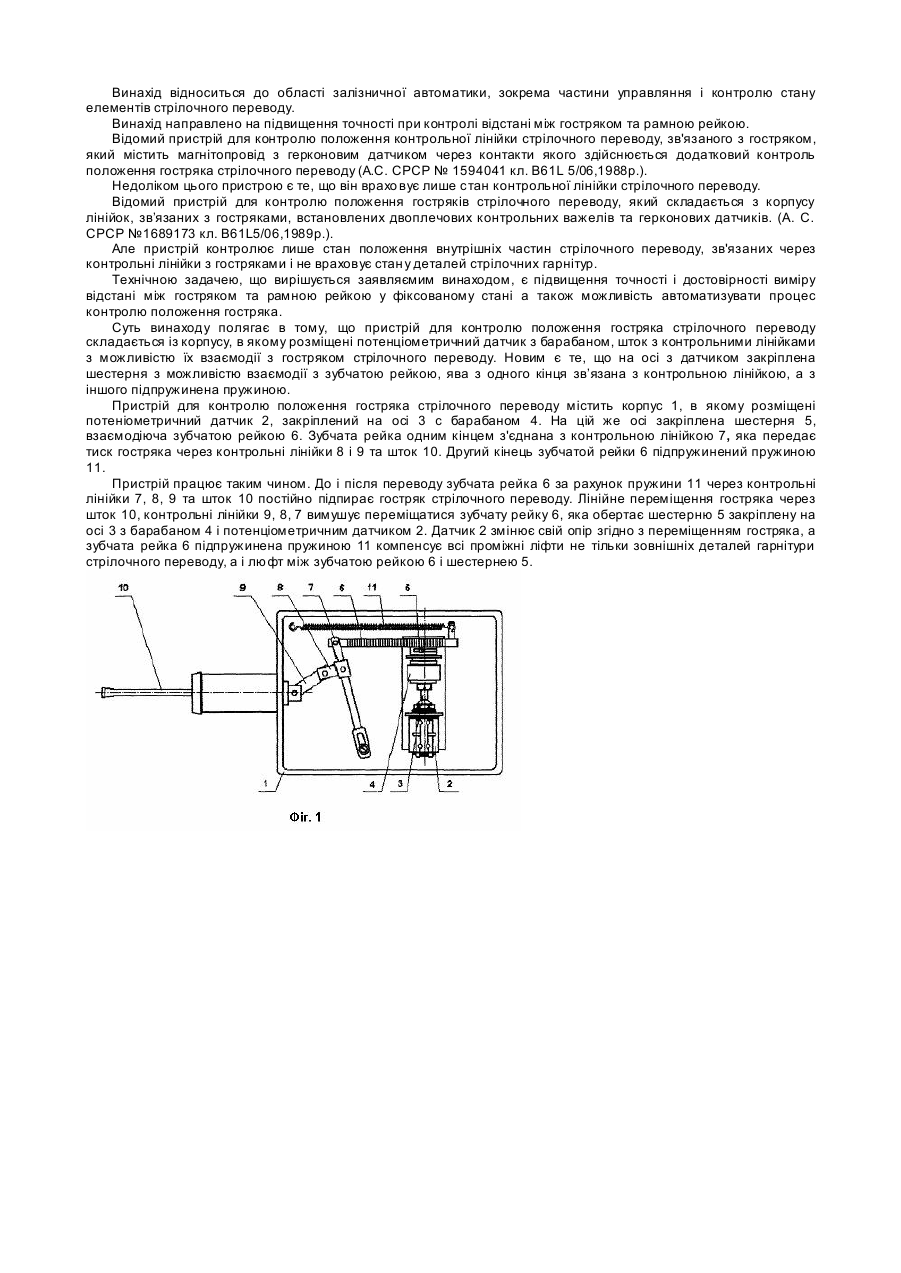
Пристрій для контролю положення гостряка стрілочного переводу, що складається з корпусу, в якому розміщені потенціометричний датчик з барабаном, шток з контрольними лінійками, з можливістю їх взаємодії з гостряком стрілочного переводу, який відрізняється тим, що додатково на осі з датчиком закріплена шестірня з можливістю взаємодії з зубчатою рейкою, яка з одного кінця з'єднана з контрольною лінійкою, а з іншого підпружинена.
Пристрій для контролю положення гостряка стрілочного переводу
Номер патенту: 61264
Опубліковано: 17.11.2003
Автори: Ельперін Ігор Володимирович, Зіненко Анатолій Евдокимович, Барденштейн Ігор Іонович, Парфьонов Володимир Іванович
МПК: B61L 5/00
Мітки: положення, стрілочного, гостряка, контролю, пристрій, переводу
Формула / Реферат:
Пристрій для контролю положення гостряка стрілочного переводу, що містить корпус, в якому розміщений контрольний важіль з можливістю його взаємодії з гостряком стрілочного переводу, до важеля рухомо прикріплені дві контрольні лінійки з датчиком, який відрізняється тим, що додатково у корпусі закріплено барабан з тросом, під’єднаний до однієї з контрольних лінійок, на барабані розміщений пружинний демпфер, при цьому як датчик використовують...
Пристрій для контролю положення гостряка стрілочного переводу
Номер патенту: 61688
Опубліковано: 17.11.2003
Автори: Парфьонов Сергій Володимирович, Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: стрілочного, гостряка, положення, переводу, пристрій, контролю
Формула / Реферат:
Пристрій для контролю положення гостряка стрілочного переводу, який містить автогенератор з блоками змінної ємності, підключений до змішувача з гетеродином, вихід якого через підсилювач високої частоти, полосові фільтри та обмежувачі з'єднаний з двома частотними детекторами, виходи яких через підсилювачі низької частоти, тригери Шмідта, підключені до блоків індикації крайніх положень гостряка, який відрізняється тим, що блок змінної ємності...
Пристрій для контролю положення гостряка залізничної стрілки
Номер патенту: 61691
Опубліковано: 17.11.2003
Автори: Парфьонов Сергій Володимирович, Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: стрілки, контролю, положення, гостряка, залізничної, пристрій
Формула / Реферат:
Пристрій для контролю положення гостряка залізничної стрілки, який містить зв'язаний з гостряком індуктивний датчик, підключений до генератора, з'єднаного з підсилювачем, вихід якого через фільтри, смугові підсилювачі та електронні ключі підключений до блоків індикації крайніх положень гостряка, який відрізняється тим, що він додатково має селективний фільтр, з'єднаний з смуговим підсилювачем, вихід якого через електронний ключ підключений до...
Наступний патент: Спосіб змішування сірчаної кислоти з водою
Випадковий патент: Спосіб одержання пігментного діоксиду титану рутильної модифікації