Електропривід змінного струму
Номер патенту: 73605
Опубліковано: 15.08.2005
Автори: Шевченко Іван Степанович, Самчелєєв Юрій Павлович, Скурятін Юрій Васильович, Карпук Ігор Анатолійович
Формула / Реферат
Електропривід змінного струму, до складу якого входить асинхронний електродвигун з фазним ротором, обмотка статора якого підключена до мережі, перший мостовий випрямляч, трифазний вхід якого з'єднаний з обмотками ротора, другий мостовий випрямляч, анодна група вентилів якого з'єднана з катодною групою вентилів першого мостового випрямляча, установлений на валу двигуна датчик швидкості, вихід якого з'єднаний з першим віднімаючим входом першого суматора, на другий вхід якого подається сигнал задання швидкості, який відрізняється тим, що перший та другий мостові випрямлячі виконані на повністю керованих вентилях, додатково введені перша та друга система керування вентилями, датчик струму, другий суматор, регулятор швидкості, перший та другий релейні елементи, виділювач модуля, при цьому трифазний вхід другого мостового випрямляча з'єднаний з обмотками статора, а між катодною групою вентилів другого мостового випрямляча та анодною групою вентилів першого мостового випрямляча ввімкнений датчик струму, вихід якого з'єднаний з першим віднімаючим входом другого суматора, а вихід останнього через другий релейний елемент з'єднаний з входом другої системи керування вентилями, вихід якої з'єднаний з керуючими електродами вентилів другого мостового випрямляча, вихід першого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний через виділювач модуля з другим входом другого суматора, а через перший релейний елемент - з входом першої системи керування вентилями, вихід якої з'єднаний з керуючими електродами вентилів першого мостового випрямляча.
Текст
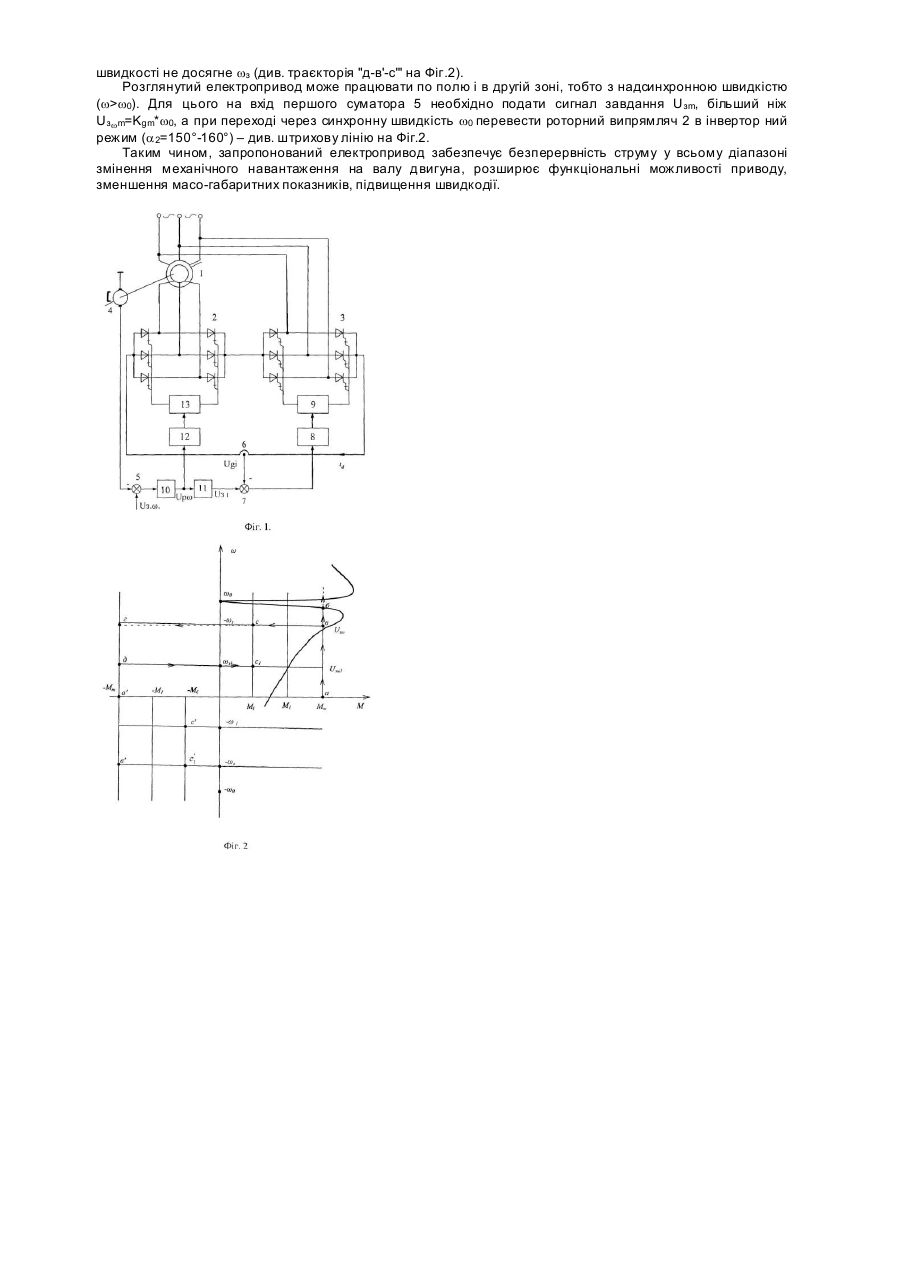
Винахід відноситься до електротехніки і може бути використаний в вентильних електроприводах на базі асинхронного електродвигуна з оазним ротором. Відомій електропровід змінного струму, до складу якого входить асинхронний двигун, обмотка статора якого ввімкнена до мережі, виводи обмотки ротора з'єднані з трифазним входом першого постового випрямляча, катодна група вентилів якого з'єднана з анодною групою вентилів другого мосового випрямляча, трифазний вхід другого мостового випрямляча з'єднаний з мережею через статичний перетворювач, який виконаний у вигляді параметричного стабілізатора струму [Авторское свидетельство СССP №1100705, кл Н02Р7/62, 1984]. Недоліком відомого електроприводу є неможливість змінювати задану величину електромагнітного моменту, низький коефіцієнт корисної дії з-за додаткових втрат потужності в резисторі, що ввімкнений. в коло випрямленого струму, високі масо-габаритні показники. Найбільш близьким за технічним рішенням є електропривод змінного струму, до складу якого входить асинхронний двигун з фазним ротором, обмотка статора якого ввімкнена до мережі, першій мостовий випрямляч, трифазний вхід якого з'єднаний з обмотками ротора, другий мостовий випрямляч, анодна група вентилів якого з’єднана з катодною групою вентилів першого мостового випрямляча, установлений на валу двигуна датчик швидкості, ви хід якого з’єднаний з першим віднімаючим входом суматора, на другий вхід якого подається сигнал завдання швидкості. [Волков И.В., Исаков В.Η. Электроприводы сo стабилизированным током в силових цепях. - М.: Радио и связь, 1991. - 216с.]. Недоліком відомого електроприводу є низький коефіцієнт корисної дії, неможливість гальмування та реверсування по колу ротора, відносно вузький діапазон регулювання величини випрямленого струму і швидкості, високі масо-габаритні показники. В основу винаходу поставлена задача вдосконалення електроприводу, в якому шляхом використання повністю керованих вентилів, додатково введених релейних елементів і регуляторів швидкості та струму, релейного керування випрямлячами досягається розширення функціональних можливостей, спрощення, зменшення масо-габаритних показників, підвищення швидкості, забезпечується безперервність струму у всьому діапазоні змінення механічного навантаження на валу двигуна. Поставлена задача вирішується за допомогою того, що в електроприводі змінного струму до складу якого входить асинхронний електродвигун з фазним ротором, обмотка статора якого ввімкнена до мережі, перший мостовий випрямляч, трифазний вхід якого з'єднаний обмотками ротора, другий мостовий випрямляч, анодна група вентилів якого з'єднана з катодною групою вентилів першого мостового випрямляча, установлений на валу двигуна датчик швидкості, вихід якого з'єднаний з першим віднімаючим входом першого суматора, на другий вхід якого подасться сигнал завдання швидкості, згідно з винаходом: 1) перший та другий мостові випрямлячі виконані на повністю керованих вентилях, 2) трифазний вхід другого мостового випрямляча з'єднаний з обмотками статора, а між катодною групою вентилів др угого постового випрямляча та анодною групою вентилів першого мостового випрямляча ввімкнений датчик струму, ви хід якого з'єднаний з першим віднімаючим входом другого суматора, а вихід останнього через другій релейний елемент з'єднаний з входом другої системи керування вентилями, вихід якої з'єднаний з керуючими електродами вентилів другого мостового випрямляча, вихід першого суматора з'єднаний з входом регулятора швидкості, вихід якого з'єднаний через видільник модуля з другим входом другого суматора, а через перший релейний елемент з входом першої системи керування, вихід якої з'єднаним з керуючими електродами вентилів першого мостового випрямляча, що дозволяє розширити функціональні можливості електроприводу, зменшити масо-габаритий показники, підвищити швидкодію, забезпечити безперервність струму у всьому діапазоні змінення механічного навантаження на валу двигуна. На Фіг.1 представлена схема запропонованого електропривода змінного струму, на Фіг.2 - механічні характеристики електропривода. До складу електропривода змінного струму входить асинхронній електродвигун 1 з фазним ротором, перший мостовий випрямляч 2, трифазний вхід якого з'єднаний обмотками ротора, другий мостовий випрямляч 3, анодна група вентилів якого з'єднана з катодною групою вентилів першого мостового випрямляча 2, датчик швидкості 4, вихід якого з'єднаний з першим віднімаючим входом першого суматора 5, на другий вхід якого подається сигнал завдання швидкості, трифазний вхід другого мостового випрямляча 3 з'єднаний з обмотками статора, між катодною групою вентилів другого мостового випрямляча 3 та анодною групою вентилів першого мостового випрямляча 2 датчик струму 8, вихід якого з'єднаний з першим віднімаючим входом другого суматора 7, а вихід через другий релейний елемент 8 з'єднаний з входом другої системи керування 9 вентилями, вихід якої з'єднаний з керуючими електродами вентилів другого мостового випрямляча 3, вихід першого суматора 5 з'єднаний з входом регулятора швидкості 10, вихід якого з'єднаний через видільник модуля 11 з другим входом другого суматора 7, а через перший релейний елемент 12 з входом першої системи керування 13, вихід якої з'єднаний з керуючими електродами вентилів першого мостового випрямляча 2. Електропривод працює таким чином. Після подачі напруги на статор асинхронного двигуна 1 та вхід випрямляча 3 подається сигнал завдання на другий вхід суматора 5. Оскільки двигун ще нерухомий, сигнал з датчика швидкості 4, що поступає на перший вхід суматора 5, відсутній, то регулятор швидкості 10 входить в режим "насичення", видаючи максимальне значення сигналу Urw на входи видільника модуля 11 та першого релейного елемента 12. Останній переходить в полонення з позитивним виходним сигналом, якому на виході системи керування 13 відповідають керуючі імпульси, які переводять першим випрямляч 2 в випрямний режим з a 1=0, при цьому фаза струмів ротора двигуна 1 буде співпадати з фазою відповідних роторних електрорушійних сил (е.p.c.), забезпечуючи виникнення на валу двигуна умовно позитивного електромагнітного моменту. Одночасно з цим сигнал Urw через видільник модуля 11 поступає на другий вхід суматора 7 як максимальне завдання Uзі на рівень випрямленого струму і d ротора. Під дією останнього при відсутності сигналу Ugi від датчика струму 6 другий релейний елемент 8 переходить в положення з позитивним вихідним сигналом, під дією якого система керування 9 генерує імпульси, що забезпечують другому випрямлячу 3 випрямний режим з максимальною вихідною е.р.с. Edд. Під дією випрямлених е.р.с, ротора Еdр та Edд випрямляча 3 струм іd починає інтенсивно збільшуватись: E dp + Edд K ce * Eрн * s + Edдд id = = Rd + pLd Rd + pLd (1) де Ксе - коефіцієнт підсилення за напругою для мостової схеми випрямлення (Ксе=1,35); Eрн - номінальне значення роторної е.p.c.; S - ковзання ротора відносно поля двигуна S=І-w/w 0; w, w 0 - швидкості ротора та поля відповідно; Rd, Ld - еквівалентні значення активного опору та індуктивності кола випрямленого струму. Як тільки його значення перейде через рівень заданого Іdз=Uзi/Кgi /Кgi – коефіцієнт передачі датчика струму, Uзi=Urw - величина сигналу завдання на рівень стабілізації випрямленого струму ротора/ релейний елемент 8 "перекидається" в положення з негативним вихідним сигналом. Останній через систему керування 9 переводить випрямляч 3 в інвертор ний режим. Завдяки цьому вихідна е.р.с. Edд змінює свою полярність на протилежну, починаючи зменшува ти випрямлений струм і d у відповідності з (1). Після переходу останнього через рівень і dз релейний елемент 8 знову перекидається, переводячи випрямляч 3 у випрямний режим. Середнє значення вихідної е.р.с. випрямляча 3 (знак і величина) визначається часом знаходження останнього у випрямному та інверторному режимах за період перемикань релейного елемента 8 t -t Edд = Edдд в i tв + ti (2) де tв, tі – час знаходження випрямляча 3 відповідно у випрямному та інверторному режимах. Під дією струм у ротора Іpm=I dз/Ксі=Idm/Ксi / Ксi - коефіцієнт підсилення за струмом мостової трифазної схеми випрямлення, Ксi - 1,22¸1,28/ та та магнітного поля, що обертається, на валу двигуна 1 з'являється умовно позитивний момент Mm=(СФ) d*Idm, під дією якого ротор починає обертатись у напрямі поля, Це відповідає двигунному режиму роботи aсинxpoнної машини в першому квадраті координатної площині w(М) – (див. Фіг.2). По мірі росту швидкості ротора зменшується його ковзання, а значить і вихідна е.р.с. Edр випрямляча 2. Це призводить у відповідності з (1) до зменшення струму і d. Як тільки він знизиться нижче рівня іdз, релейний елемент 8 переводить випрямляч 3 знову у випрямний режим, і струм починає збільшуватись і т.д. Таким чином, при стабілізації струму іd на рівні Іdз збільшення швидкості двигуна 1 автоматично призводить до зменшення часу перебування випрямляча 3 в інвертному режимі (див. траєкторія а-в на Фіг.2). Як тільки швидкості ротора двигуна 1 наблизиться до заданого wз=Uзm/Kgm /Kgm – коефіціент передачі датчика швидкості./, регулятор швидкості 10 виходить з режиму "насичення", зменшуючий свій вихідний сигнал Uр10=Uзi, тобто завдання на рівень стабілізації випрямленого струму - іdз. Релейний елемент 8, реагуючий на Uзi, зменшує час перебування перетворювача 3 у випрямному режимі, зменшуючи величину Ld. Як тільки остання зменшиться до значення Idc, зростання швидкості ротора закінчиться (траєкторія в-с на Фіг.2). Іdс=Mc/(СФ)d (3) де Mc - момент статичного навантаження на валу двигуна І; (CФ)d= Ксе*Epн /w 0 - значення магнітного потоку двигуна, перераховане на випрямлений струм. Якщо Мс збільшиться, на виході регулятора швидкості 10 також збільшиться сигнал Urw =Uзі, як завдання на рівень Idз, а значить, струм ротора і момент двигуна 1 до рівня Mc, завдяки чому припиняється зменшення швидкості. При цьому струм ротора (випрямлений струм id) збільшується як за рахунок е.р.с. Еdp (збільшується ковзання ротора), так і за рахунок часу tв релейного элемента 8. Швидкість же ротора двигуна 1 у випадку пропорційно-інтегрального регулятора швидкості 10 стабілізується на заданому рівні wз, а при пропорційному – з деякою похибкою Dwс, яка визначається коефіцієнтом підсилення цього регулятора. Для зниження рівня швидкості ротора двигуна 1 необхідно зменшити значення сигналу завдання U зm на другий вхід першого суматора 5. Регулятор швидкості 10 при цьому переходить в режим "насичення" з негативним значенням свого вихідного сигналу - Urw =Uзі. Перший релейний елемент 12 "перекидається", видаючи максимальний негативний сигнал системи керування 13 вентилями роторного перетворювача 2, яка переводить останній в інвентарний режим, тобто переводячи відкриваючі імпульси в область з a 2=150°160°. Крива струму ротора ip зсувається на 150-160 електричних градусів відносно кривої е.р.с. Це рівнозначно зміненню полярності роторного струму двигуна 1, а значить, і електромагнітного моменту. Оскільки на другий вхід др угого суматора 7 сигнал завдання Uзi проходить через видільник модуля 11, то цей сигнал не змінює полярність, і релейний елемент 8 разом з системою керування 9 через випрямляч 3 будуть знову підтримувати струм id на рівні Idз, як це було описано вище для двигунного режиму. Стабілізація id буде реалізовуватись за рахунок збільшення часу ti перебування випрямляча 3 в інверторному режимі, оскільки випрямленна е.р.с. Edp ротора буде збільшуватись при зменшенні швидкості (збільшується ковзання ротора відносно поля). Електропривод гальмується до нового (меншого) рівня швидкості (див. траєкторія "г-д" на Фіг.2). Як тільки швидкість ротора знизилась нижче заданого рівня wз1, релейний елемент 12 знову "перекидається" в стан з позитивним вихідним сигналом що переводить роторний випрямляч 2 у випрямний режим, а двигун - у двигунний (траєкторія "wз1-С1" на Фіг.2) зі струмом Idc. Якщо полярність сигнал Uзm змінити на негативну, то описані вище процеси повторяться. При цьому після зупинки ротор почне розганятись у протилежному напрямі (проти поля) до стану, поки рівень швидкості не досягне wз (див. траєкторія "д-в'-с'" на Фіг.2). Розглянутий електропривод може працювати по полю і в другій зоні, тобто з надсинхронною швидкістю (w>w0). Для цього на вхід першого суматора 5 необхідно подати сигнал завдання U зm, більший ніж Uзw m=Kgm*w0, а при переході через синхронну швидкість w0 перевести роторний випрямляч 2 в інвертор ний режим (a 2=150°-160°) – див. штрихову лінію на Фіг.2. Таким чином, запропонований електропривод забезпечує безперервність струму у всьому діапазоні змінення механічного навантаження на валу двигуна, розширює функціональні можливості приводу, зменшення масо-габаритних показників, підвищення швидкодії.
ДивитисяДодаткова інформація
Назва патенту англійськоюAlternating-current electric drive
Автори англійськоюShevchenko Ivan Stepanovych, Samcheleiev Yurii Pavlovych, Skuriatin Yurii Vasyliovych, Karpuk Ihor Anatoliiovych
Назва патенту російськоюЭлектропривод переменного тока
Автори російськоюШевченко Иван Степанович, Самчелеев Юрий Павлович, Скурятин Юрий Васильевич, Карпук Игорь Анатольевич
МПК / Мітки
МПК: H02P 23/00, H02P 25/16
Мітки: струму, змінного, електропривід
Код посилання
<a href="https://ua.patents.su/3-73605-elektroprivid-zminnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Електропривід змінного струму</a>
Електропривід змінного струму
Номер патенту: 63254
Опубліковано: 15.01.2004
Автори: Скурятін Юрій Васильович, Карпук Ігор Анатолійович, Шевченко Іван Степанович, Самчелєєв Юрій Павлович
Мітки: змінного, електропривід, струму
Формула / Реферат:
Електропривід змінного струму, до складу якого входить асинхронний електродвигун з фазним ротором, обмотка статора якого підключена до мережі, виводи обмотки ротора з’єднані з трифазним входом першого мостового випрямляча, катодна група вентилів якого з’єднана з анодною групою вентилів другого мостового випрямляча, який відрізняється тим, що другий мостовий випрямляч виконаний на повністю керованих вентилях, при цьому анодна група вентилів...
Електропривід змінного струму
Номер патенту: 58150
Опубліковано: 15.07.2003
Автори: Карпук Ігор Анатолійович, Шевченко Іван Степанович, Потапов Володимир Дмитрович, Самчелєєв Юрій Павлович
МПК: H02P 21/00, H02P 7/00, H02P 1/00, H02P 23/10
Мітки: змінного, струму, електропривід
Формула / Реферат:
Електропривід змінного струму, що містить асинхронний двигун з фазним ротором, виводи якого під'єднані до першого трифазного мостового випрямляча, індуктивно-ємнісний перетворювач, вхід якого з'єднаний з трифазною мережею, а вихід під'єднаний до входу другого трифазного некерованого мостового випрямляча, при цьому мости з'єднані послідовно з співпадаючою провідністю їх вентилів, який відрізняється тим, що перший трифазний мостовий випрямляч...
Електропривід змінного струму

Номер патенту: 57051
Опубліковано: 16.06.2003
Автори: Ленська Олена Олександрівна, ГАЛИНОВСЬКИЙ ОЛЕКСАНДР МИХАЙЛОВИЧ
МПК: H02P 27/04
Мітки: електропривід, змінного, струму
Формула / Реферат:
1. Електропривід змінного струму, який містить асинхронний двигун з фазним ротором, в якому обмотки кожної фази ротора поділені на частини, в загальному випадку нерівні, які з'єднані за схемою противмикання, обмотки фаз з'єднані в зірку, який відрізняється тим, що містить мостовий випрямляч, який підключений до вузлів з'єднання частин роторних обмоток.2. Електропривід за п.1, який відрізняється тим, що мостовий випрямляч є керованим, а...
Електропривід змінного струму
Номер патенту: 54209
Опубліковано: 17.02.2003
Автор: Барський Віктор Олексійович
МПК: H02P 27/04
Мітки: електропривід, змінного, струму
Формула / Реферат:
1. Електропривід змінного струму, який містить двигун змінного струму з секціонованою статорною обмоткою, перетворювачі частоти, виконані кожний по схемі з одним силовим ключем у плечі і підключені до відповідних секцій статорної обмотки, та систему керування перетворювачами частоти, який відрізняється тим, що кожна секція статорної обмотки складається з електрично з'єднаних фазних гілок за кількістю фаз двигуна змінного струму, кількість...
Електропривід з релейним керуванням
Номер патенту: 31224
Опубліковано: 15.12.2000
Автори: Казачковський Микола Миколайович, Савченко Сергій Борисович
МПК: H02P 7/06
Мітки: електропривід, релейним, керуванням
Текст:
...зг єднаний з виходом другого суматора, перший вхід якого підключений до виходу давача струму, другий вхід - до виходу давача напруги, третій вхід - до виходу третього блока диференціювання, п' ятнй вхід - до виходу задавача мінімальної напруги силового фільтра, вихід блока виділення модуля з' єднаний з входом третього блока диференціювання та з четвертям входом другого суматора, а ного вхід підключений до виходу третього суматора,...
Попередній патент: Спосіб одержання твердої лікарської форми еналаприлу
Наступний патент: Похідні глюкопіранозилоксибензилбензолу і лікарські композиції, що їх містять
Випадковий патент: Спосіб виготовлення фільтрувального елемента трубчастого типу