Спосіб визначення вертикалі на рухомому об’єкті
Номер патенту: 75913
Опубліковано: 15.06.2006
Автори: Крельштейн Петро Давидович, Бурачек Всеволод Германович, Суковенко Оксана Володимирівна, Шульц Роман Вікторович
Формула / Реферат
1. Спосіб визначення вертикалі на рухомому об'єкті, заснований на властивості рідинного рівня з повітряною бульбашкою індексувати горизонтальне положення основи рівня та властивості гіроскопічного датчика зберігати незмінним положення осі гіроскопа у просторі, який відрізняється тим, що під час руху об'єкта вимірюють зміну положення бульбашки рідинного рівня оптико-електронним способом, одночасно вимірюють зміну положення корпусу гіроскопічного датчика відносно його осей у двох взаємо перпендикулярних напрямках від вертикалі, при цьому враховуючи графік зміни відносної кутової швидкості переміщення гіроскопічного датчика відносно своєї чутливої осі і положення бульбашки рівня, визначають часові дискретні зони плавної зміни положення бульбашки рівня, у яких дані про місцеположення бульбашки рівня використовують для обчислення положення об'єкта відносно вертикалі у задані моменти часу.
2. Спосіб за п. 1, який відрізняється тим, що за результатами поточного обчислення положення вертикалі при русі об'єкта у визначених часових зонах вимірювання положення бульбашки рівня уводять поправку зміни положення осі відходу гіроскопічного датчика.
Текст
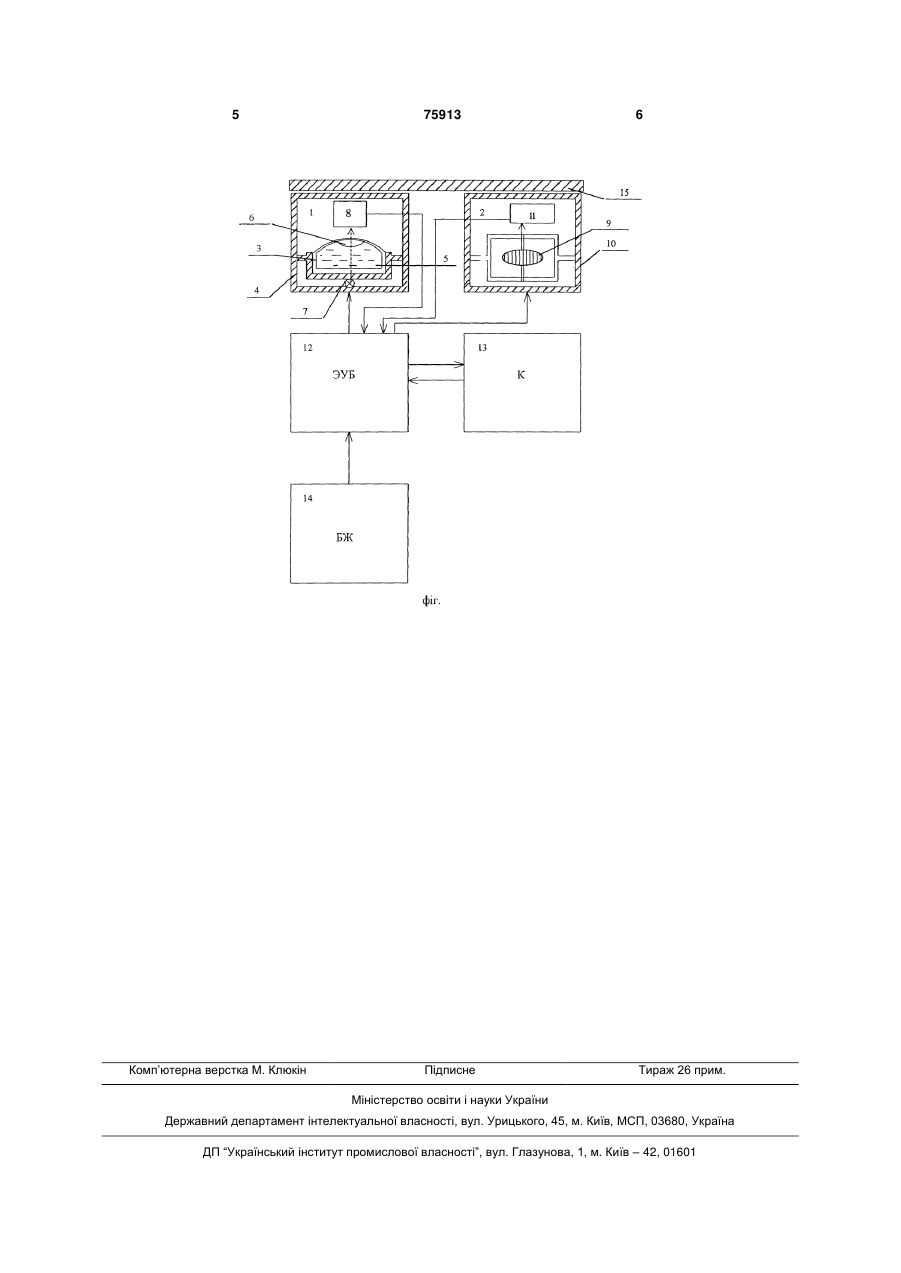
1. Спосіб визначення вертикалі на рухомому об'єкті, заснований на властивості рідинного рівня з повітряною бульбашкою індексувати горизонтальне положення основи рівня та властивості гіроскопічного датчика зберігати незмінним положення осі гіроскопа у просторі, який відрізняється тим, що під час руху об'єкта вимірюють зміну положен 3 75913 4 електронним способом, одночасно вимірюють зміпри взаємодії прискорень вище визначеного знану положення корпусу гіроскопічного датчика відчення виконати вимірювання стає неможливим. носно його осей у двох взаємно-перпендикулярних У той же час при спокійному польоті з плавною напрямках від вертикалі, при цьому з врахуванням зміною положення літака у просторі датчик (1) виграфіків зміни відносної кутової швидкості перемімірює положення бульбашки (6) та видає у цифщення гіроскопічного датчика відносно своєї чуттровом коді сигнал в електронний керуючий блок ливої осі і положення бульбашки рівня визначають (12). Таким чином, у польоті мають місце дискретні тимчасові дискретні зони плавної зміни положення часові зони, у плині яких контролюється положенбульбашки рівня, у діапазонах яких дані про місня літака за датчиком (1). церозташування бульбашки рівня використовують При цьому вплив невеликих величин прискодля обчислення положення об'єкта відносно веррень на положення бульбашки (6) виключають тикалі у задані моменти часу. (або значно послаблюють) за рахунок обчислення Запропонований спосіб полягає у наступному: середнього положення за певний відрізок часу, що є два канали інформації про положення вертикалі включає до себе декілька часових зон, в яких відна підвішеному об'єкті. Перший канал реалізує булися вимірювання вертикалі. гіроскопічний спосіб збереження заданої вертикалі Інформація про це, отримана блоком (12), пе(горизонту), другий канал реалізує спосіб, засноредається в блок (13) для обробки; після обробки ваний на властивості повітряної бульбашки у рідиформується сигнал про положення вертикалі (сигні займати верхнє положення (що традиційно винал А), прив'язаний до часової шкали. Одночасно користовується в геодезії, де бульбашкові рівні від вимірювального канала (11) датчика (2) поступрацюють у статиці). пає інформація про положення осі гіроскопа (9) в Пропонується спосіб, який об'єднує описані блок (12) та передається у блок (13), де формудва способа - два канала інформації. При цьому ється сигнал про положення осі гіроскопа (сигнал перший спосіб реалізує задачу короткочасного В), прив'язаний до часової шкали гіроскопа. збереження інформації про вертикаль, а другий У блоці (13) будуються графіки сигналів А і В періодичного (у моменти "спокійного" польоту) та обчислюються результати: отримання інформації про положення вертикалі. 1. середнє положення вертикалі по датчику (1) Аналіз відомих технічних рішень та наукової за певний період часу. Опираючись на дискретні літератури показав відсутність технічних рішень відрізки часу та дані дійсних вимірів вертикалі, для даних цілей, що дозволяє рахувати запропозначення у відрізках, які не мають вимірювань, новане рішення новим. блок (13) встановлює інтерполюванням; На Фіг. приведена схема пристрою, за допомо2. середнє положення осі гіроскопа (9) за той гою якого реалізується запропонований спосіб. же період часу за пунктом 1; Пристрій складається з двох датчиків: рідинного 3. враховуючи жорстоке розміщення датчиків (1) з чутливою повітряною бульбашкою та гіроско(1 і 2) та їх елементів на єдиній основі (15), порівпічного (2) із стабілізованою у просторі чутливою нюють графіки отримані у блоці (13) за пунктами 1 віссю гіроскопа. та 2 із високою точністю отримають відхилення Датчик (1) включає в себе рівень який складаположення осі гіроскопа (9) від істинної вертикалі ється із скляної ампули (3) у корпусі (4), наповнюна шкалі часових міток; вача - рідини (5), повітряної бульбашки (6), підсві4. для і-того моменту часу визначають значенчувача рівня (7), оптико - електронного , ня i f A i, Bi , при цьому по серії i i 1 n блок вимірювального каналу з багатоелементним фо(13) обчислює величину відходу гіроскопа, датчика топриймачем (8). (2), яка використовується при обробці даних (наДатчик (2) включає до себе гіроскоп (гіромоприклад, аерофотозйомки) або при поточному тор) (9) у карадановому підвісі, який розташований програмуванні положення вертикалі при керуванні у корпусі (10), вимірювальний двокоординатний польотом. Таким чином, враховуючи, що відхід канал (11) визначення поточного положення осі сучасних серійних гіроскопів не перевищує 2-3 гіромотора (9) відносно корпуса (10). кутових градуса в годину, а забезпечення точності Пристрій постачено електронним керуючим бульбашкових рівней порядку одиниць кутових блоком (12), комп'ютером (13), блоком живлення хвилин не є проблемою, запропонований спосіб (14). визначення вертикалі на підвішеному об'єкті доОбидва датчики (1 і 2) жорстко закріплені свозволяє суттєво підвищити точність оцінки полоїми корпусами (4 і 10) на єдиній основі (15), зорієнження об'єкта, досягнувши погрішності не більше тованій та установленій жорстко відносно головодиниць кутових хвилин. Це дуже важливо, наприних осей підвішеного об'єкта. клад, для аерофотозйомки, де точність застосовуРобота пристрою по запропонованим спосованих датчиків вертикалі ~3°. бом проводиться наступним чином: Література: При рівномірно - поступальному русі об'єкта 1. Ишлинский А.Ю. "Ориентация, гироскопы и (наприклад, політ літака) бульбашка (6) рівня датинерциальная навигация", Москва, Наука, 1976г. чика (1) буде відслідковувати положення вертика2. Руководство по аерофотосъѐмочным раболі. У дійсності політ літака супроводжується вплитам. М., Воздушный транспорт, 1988 год. вом прискорень, зв’язаних з дією вітрових 3. Дорожинський О.Л. "GPS і аерофотограмнавантажень, наявністю повітряних ям, хмарності, метрія - що це дає?", науково-технічний журнал флуктуацій швидкості польоту та ін. "Вісник геодезії та картографії" №3, 1999р. У зв'язку з тим, що рівень датчика (1) має обмежувальний діапазон роботи бульбашки (6), тоді 5 Комп’ютерна верстка М. Клюкін 75913 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining the vertical at a movable object
Автори англійськоюBurachek Vsevolod Hermanovych, Krelshtein Petro Davydovych
Назва патенту російськоюСпособ определения вертикали на подвижном объекте
Автори російськоюБурачек Вселовод Германович, Крельштейн Петр Давидович
МПК / Мітки
МПК: G01C 19/00
Мітки: вертикалі, визначення, об'єкти, спосіб, рухомому
Код посилання
<a href="https://ua.patents.su/3-75913-sposib-viznachennya-vertikali-na-rukhomomu-obehkti.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення вертикалі на рухомому об’єкті</a>
Пристрій визначення вертикалі на рухливому об`єкті
Номер патенту: 10397
Опубліковано: 15.11.2005
Автори: Якунін Олександр Володимирович, Надточій Олександр Володимирович, Шульц Роман Володимирович, Крельштейн Петро Давидович, Бурачек Всеволод Германович
МПК: G02B 13/08
Мітки: вертикалі, пристрій, визначення, рухливому, об'єкти
Формула / Реферат:
Пристрій визначення вертикалі на рухливому об'єкті, що містить рідинний рівень з повітряною бульбашкою, гіроскопічний блок та блок управління, який відрізняється тим, що в ньому рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій містить оптико-електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопа, блок обробки інформації; при цьому виходи...
Оптико-електронний пристрій визначення вертикалі
Номер патенту: 73328
Опубліковано: 15.07.2005
Автори: Крельштейн Петро Давидович, Крячок Сергій Дмитрович, Суковенко Оксана Володимирівна, Боровой Валентин Олександрович, Бурачек Всеволод Германович
МПК: G01C 9/00
Мітки: пристрій, оптико-електронний, вертикалі, визначення
Формула / Реферат:
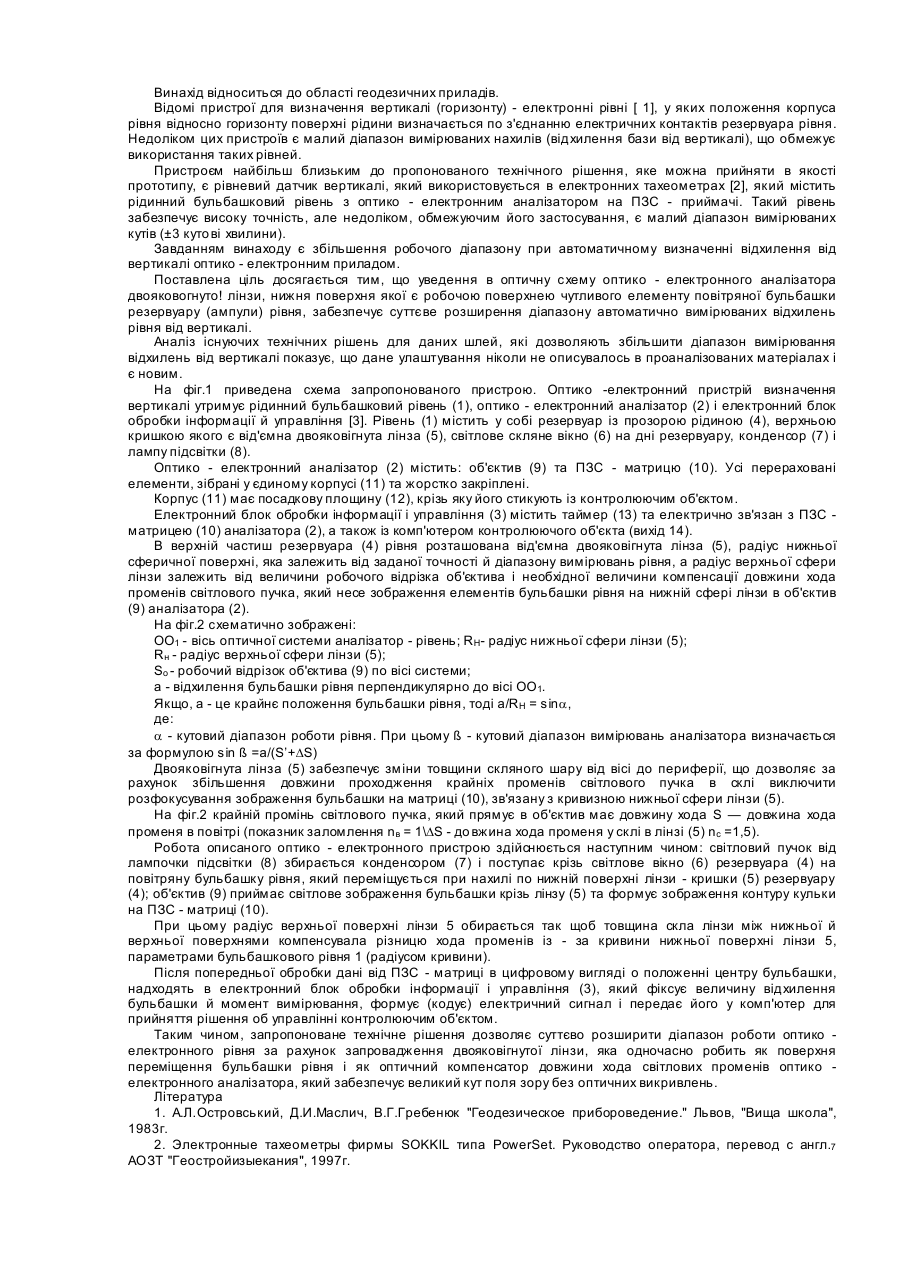
Оптико-електронний пристрій визначення вертикалі, який має рідинний бульбашковий рівень, оптико-електронний аналізатор з об'єктивом і ПЗС-матрицею, корпус, блок підсвічування, електронний блок обробки інформації та керування, який відрізняється тим, що верхня частина рівня обмежена двовгнутою лінзою, при цьому величина радіуса нижньої сфери лінзи залежить від заданої точності і діапазону вимірювань пристрою, а радіус верхньої сфери лінзи...
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Маринич Юрій Михайлович, Збруцький Олександр Васильович, Нестеренко Олег Іванович
МПК: G01C 19/00
Мітки: визначення, об'єкта, кутової, спосіб, орієнтації
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Спосіб і система розповсюдження інформаційних повідомлень у рухомому поїзді метрополітену
Номер патенту: 63040
Опубліковано: 15.01.2004
Автори: Голембо Дмитро Вадимович, Діденко Геннадій Миколайович
МПК: G09F 27/00
Мітки: інформаційних, повідомлень, метрополітену, поїзді, система, спосіб, розповсюдження, рухомому
Формула / Реферат:
1. Спосіб розповсюдження інформаційних повідомлень, переважно в рухомому поїзді метрополітену, що включає передачу інформаційних повідомлень на екрани колективного користування по каналу зв'язку, який відрізняється тим, що як канал зв'язку використовують багатопровідний складений канал зв'язку, яким з'єднують усі вагони рухомого поїзда, як екрани колективного користування використовують щонайменше два з'єднаних тильними сторонами монітори,...
Спосіб розміщення реклами у рухомому складі метрополітену
Номер патенту: 66314
Опубліковано: 15.04.2004
Автор: Шкода Ігор Анатолійович
МПК: G09F 21/00
Мітки: реклами, рухомому, складі, метрополітену, спосіб, розміщення
Формула / Реферат:
Спосіб розміщення реклами у рухомому складі метрополітену, що включає отримання рекламного зображення наклеюванням вручну окремих елементів, виготовлених із самоклейкої плівки, наприклад, на боковій поверхні транспортного засобу, який відрізняється тим, що розміщення реклами здійснюють всередині рухомого складу метрополітену на простінках між вікнами і дверима розміром 73х73 см, на скосах та у верхньому периметрі вагона метрополітену шляхом...
Попередній патент: Фунгіцидна композиція на основі похідної піридилметилбензаміду та пропамокарбу, спосіб боротьби з фітопатогенними грибками
Наступний патент: Пристрій безпровідної передачі даних (варіанти) та спосіб керування потоком даних у розподільній системі передачі даних (варіанти)
Випадковий патент: Спосіб одержання композиційного матеріалу на основі хімічно осадженого нікелю та нанодисперсних алмазів