Пристрій визначення вертикалі на рухливому об`єкті
Номер патенту: 10397
Опубліковано: 15.11.2005
Автори: Надточій Олександр Володимирович, Крельштейн Петро Давидович, Якунін Олександр Володимирович, Бурачек Всеволод Германович, Шульц Роман Володимирович

Формула / Реферат
Пристрій визначення вертикалі на рухливому об'єкті, що містить рідинний рівень з повітряною бульбашкою, гіроскопічний блок та блок управління, який відрізняється тим, що в ньому рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій містить оптико-електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопа, блок обробки інформації; при цьому виходи та входи оптико-електронного блока вимірювання положення бульбашки рівня та датчика вимірювання положення осі гіроскопа електронно зв'язані з відповідними входами і виходами блока управління, вихід та вхід блока управління зв'язані відповідно з входом і виходом блока обробки інформації.
Текст
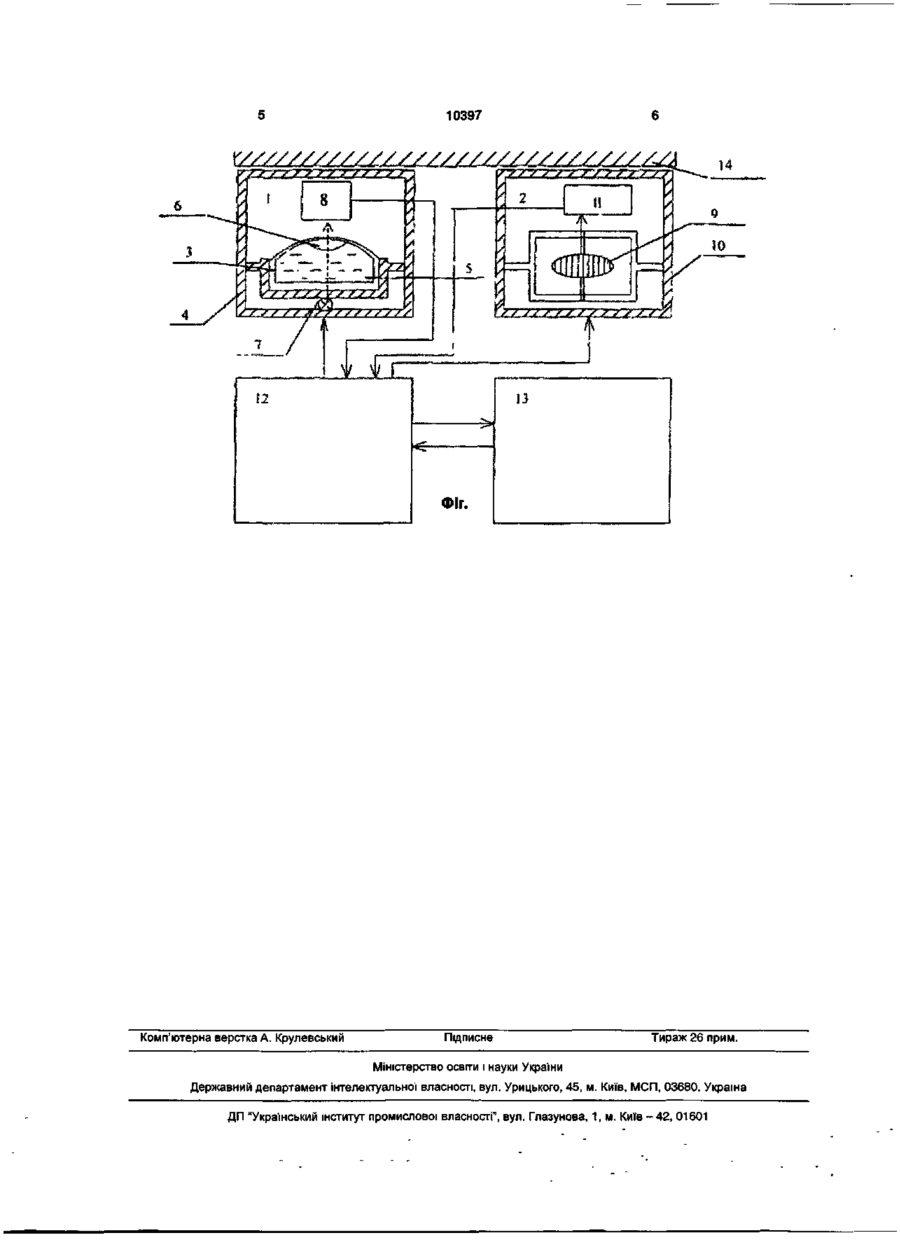
Пристрій визначення вертикалі на рухливому об'єкті, що містить рідинний рівень з повітряною бульбашкою, гіроскопічний блок та блок управлін ня, який відрізняється тим, що в ньому рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій містить оптико-електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопа, блок обробки інформації; при цьому виходи та входи оптикоелектронного блока вимірювання положення бульбашки рівня та датчика вимірювання положення осі гіроскопа електронно зв'язані з відповідними входами і виходами блока управління, вихід та вхід блока управління зв'язані відповідно з входом і виходом блока обробки інформації. Корисна модель відноситься до області геодезії, зокрема до розв'язку навігаційно геодезичних задач при аерофотозйомці. Відомі пристрої визначення вертикалі на морських судах, які базуються на гіроплатформених вимірюваннях [1], а також гіроскопічні пристрої для задания вертикалі в авіації за численням, тобто за збереженням інформації гіроскопічним пристроєм у ході якогось часу (гірогоризонт) [2]. Відомий також пристрій визначення вертикалі, оснований на порівнянні показників трьох приймачів GPS, які розташовані на конструкціях літака [3]. Теоретично такий варіант може дати підвищення точності визначення вертикалі до 10-15 кутових хвилин, проте практична реалізація цього способу зв'язана з суттєвими труднощами по розташуванню приймачів GPS на літаку (при цьому можна розміщувати тільки на літаку великих розмірів). Найбільш близьким аналогом за технічною суттю, який можна прийняти в якості прототипу, є пристрій визначення вертикалі на літаку за гірогоризонтом, що являє собою гіроскоп з трьома ступенями свободи, так як ротор гіроскопа підвішений у кардановому підвісі [2]. До недоліків такого гіроскопічного пристрою відноситься порівняно низька точність визначення положення вертикалі (горизонту), що суттєво ускладнює обробку матеріалів аерофотознімання, обумовлює великий об'єм підготовчих геодезичних робіт. Задачею корисної моделі є створення при строю визначення вертикалі на рухливому об'єкті, який би дав можливість підвищити точність аерофотозйомки та знизити трудомісткість наземних геодезичних робіт, що забезпечують аерофотозйомку. При цьому задача вирішується за рахунок того, що в пристрої рідинний рівень з повітряною бульбашкою та гіроскопічний блок закріплені в єдиному корпусі, при цьому пристрій вміщує блок управління, оптико - електронний блок вимірювання положення бульбашки рівня, датчик вимірювання положення осі гіроскопу, блок обробки інформації; запропонований пристрій визначення вертикалі на рухливому об'єкті, заснований на властивості рідинного рівня з повітряною бульбашкою індексувати горизонтальне положення основи осей рівня та властивості гіроскопічного датчика зберігати незмінним положення осі гіроскопа у просторі. При русі об'єкта вимірюють зміну положення бульбашки рідинного рівня оптикоелектронним пристроєм, одночасно вимірюють зміну положення корпуса гіроскопічного датчика відносно його осей у двох взаємно - перпендикулярних напрямках від вертикалі, при цьому з врахуванням графіків зміни відносної кутової швидкості переміщення гіроскопічного датчика відносно своєї чуттєвої осі і положення бульбашки рівня визначають тимчасові дискретні зони плавної зміни положення бульбашкового рівня, у діапазонах яких дані про місце розташування бульбашки рівня використовують для обчислення положення (24)15.11.2005 со О) 10397 об'єкта відносно вертикалі у задані моменти часу. Принцип роботи запропонованого пристрою полягає у наступному: є два канала інформації по положенню вертикалі на підвішеному об'єкті. Перший канал реалізує гіроскопічний принцип збереження заданої вертикалі (горизонту), другий канал реалізує принцип, заснований на властивості повітряній бульбашки у рідині займає верхнє положення (що традиційно використовується в геодезії, де бульбашкові рівні працюють у статиці), з оптично-електронним вимірюванням цього положення. Пропонується пристрій, який об'єднує описані два канала інформації. При цьому перший канал реалізує задачу короткочасного збереження інформації про вертикаль, а другий - періодичного (у моменти "спокійного" польоту) отримання інформації про положення вертикалі. Аналіз відомих технічних рішень та наукової літератури показав відсутність технічних рішень для даних цілей, що дозволяє рахувати запропоноване рішення новим. На Фіг. приведена схема запропонованого пристрою. Пристрій складається з двох датчиків: оптико-електронного (1) з рідинним рівнем, що має чутливу повітряну бульбашку та гіроскопічного (2) із стабілізованою у просторі чутливою віссю гіроскопа. Датчик (1) включає до себе рівень який складається із скляної ампули (3) у корпусі (4), наповнювача - рідини (5), повітряної бульбашки (6), підсвітка рівня (7), оптико-електронного вимірювального блока з багатоелементним фотоприймачем (8). Датчик (2) включає в себе гіроскоп (9) у кардановому підвісі, який розташований у корпусі (10), вимірювальний двокоординатний канал (11) визначення текучого положення осі гіромотора (9) відносно корпуса (10). Пристрій оснащено електронним керуючим блоком (12), блоком обробки інформації (13). Обидва датчика (1 і 2) жорстко закріплені своїми корпусами (4 і 10) на єдиній основі (14), зорієнтованій та установленій жорстко відносно головних осей підвішеного об'єкта. Робота пристрою проводиться наступним образом: При рівномірно-поступальному русі об'єкта (наприклад, політ літака) бульбашка (6) рівня датчика (1) буде відслідковувати положення вертикалі. У дійсності політ літака супроводжується впливом прискорень, зв'язаних з дією вітрових навантажень, наявністю повітряних ям, хмарності, флуктуацій швидкості польоту та ін. У зв'язку з тим, що рівень датчика (1) має обмежувальний діапазон роботи бульбашки (6), тоді при взаємодії прискорень вище визначеного значення виконати вимірювання стає неможливим. У той же час при спокійному польоті з плавною зміною положення літака у просторі датчик (1) ви мірює положення бульбашки (6) та видає у цифровому коді сигнал в електронний керуючий блок (12). Таким чином, у польоті мають місце дискретні часові зони, у плині яких контролюється положення літака за датчиком (1). При цьому вплив невеликих величин прискорень на положення бульбашки (6) виключають (або значно послаблюють) за рахунок обчислення середнього положення за певний відрізок часу, що включає до себе декілька часових зон, в яких відбулися вимірювання вертикалі. Інформація про це, отримана блоком (12), передається в блок (13) для обробки; після обробки формується сигнал про положення вертикалі (сигнал А), прив'язаний до часової шкали. Одночасно від вимірювального каналу (11) датчика (2) поступає інформація про положення осі гіроскопа (9) в блок (12) та передається у блок (13), де формується сигнал про положення осі гіроскопа (сигнал В), прив'язаний до часової шкали гіроскопа. У блоці (13) будуються графіки сигналів А і В та обчислюються результати: 1. Середнє положення вертикалі по датчику (1) за певний період часу. Опираючись на дискретні відрізки часу та дані дійсних вимірів вертикалі, значення у відрізках, які не мають вимірювань, блок (13) встановлює інтерполюванням; 2. Середнє положення осі гіроскопа (9) за той же період часу за пунктом 1; 3. Враховуючи жорстке розміщення датчиків (1 і 2) та їх елементів на єдиній основі (15), порівнюють графіки побудовані у блоці (13) за пунктами 1 та 2 і з високою точністю отримають відхилення положення осі гіроскопа (9) від істинної вертикалі на шкалі часових міток; 4. для і-того моменту часу визначають значення ,= f(A,, В,), при цьому по серії і (і = 1, п) блок (13) обчислює величину відходу гіроскопа по датчику (2), яка використовується при обробці даних (наприклад, аерофотозйомки) або при текучому програмуванні положення вертикалі при керуванні польотом. Таким чином, враховуючи, що відхід сучасних серійних гіроскопів не перевищує 2-3 кутових градуса в годину, а забезпечення точності бульбашкових рівнів близько одної-двох кутових хвилин не є проблемою, запропонований спосіб визначення вертикалі на підвішеному об'єкті, дозволяє суттєво підвищити точність оцінки положення об'єкта, досягнувши погрішності не більш одиниць кутових хвилин. Література: 1. Ишлинский А.Ю. "Ориентация, гироскопы и инерциальная навигация", Москва, Наука, 1976 г. 2. Руководство по аерофотосьемочным работам. М., Воздушный транспорт, 1988 год. 3. Дорожинський О.Л. "GPS і аерофотограмметрія - що це дає?", науково-технічний журнал "Вісник геодезії та картографії" №3, 1999 р. 10397 14 Комп'ютерна верстка А. Крулевський Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for determining the vertical at a movable object
Автори англійськоюBurachek Vsevolod Hermanovych, Krelshtein Petro Davydovych, Nadtochii Oleksandr Volodymyrovych, Shults Roman Volodymyrovych
Назва патенту російськоюУстройство для определения вертикали на подвижном объекте
Автори російськоюБурачек Вселовод Германович, Крельштейн Петр Давидович, Надточий Александр Владимирович, Шульц Роман Владимирович
МПК / Мітки
МПК: G02B 13/08
Мітки: пристрій, об'єкти, визначення, вертикалі, рухливому
Код посилання
<a href="https://ua.patents.su/4-10397-pristrijj-viznachennya-vertikali-na-rukhlivomu-obehkti.html" target="_blank" rel="follow" title="База патентів України">Пристрій визначення вертикалі на рухливому об`єкті</a>
Оптико-електронний пристрій визначення вертикалі
Номер патенту: 73328
Опубліковано: 15.07.2005
Автори: Суковенко Оксана Володимирівна, Бурачек Всеволод Германович, Крельштейн Петро Давидович, Боровой Валентин Олександрович, Крячок Сергій Дмитрович
МПК: G01C 9/00
Мітки: пристрій, оптико-електронний, визначення, вертикалі
Формула / Реферат:
Оптико-електронний пристрій визначення вертикалі, який має рідинний бульбашковий рівень, оптико-електронний аналізатор з об'єктивом і ПЗС-матрицею, корпус, блок підсвічування, електронний блок обробки інформації та керування, який відрізняється тим, що верхня частина рівня обмежена двовгнутою лінзою, при цьому величина радіуса нижньої сфери лінзи залежить від заданої точності і діапазону вимірювань пристрою, а радіус верхньої сфери лінзи...
Пристрій для визначення кратності пін
Номер патенту: 2653
Опубліковано: 26.12.1994
Автори: Садлівський Володимир Якович, Халан Ігор Федорович, Винницький Володимир Миколайович, Лазорик Михайло Петрович, Юзефчик Олександр Юрійович
МПК: G01N 15/08, G01N 27/02
Мітки: пристрій, пін, визначення, кратності
Формула / Реферат:
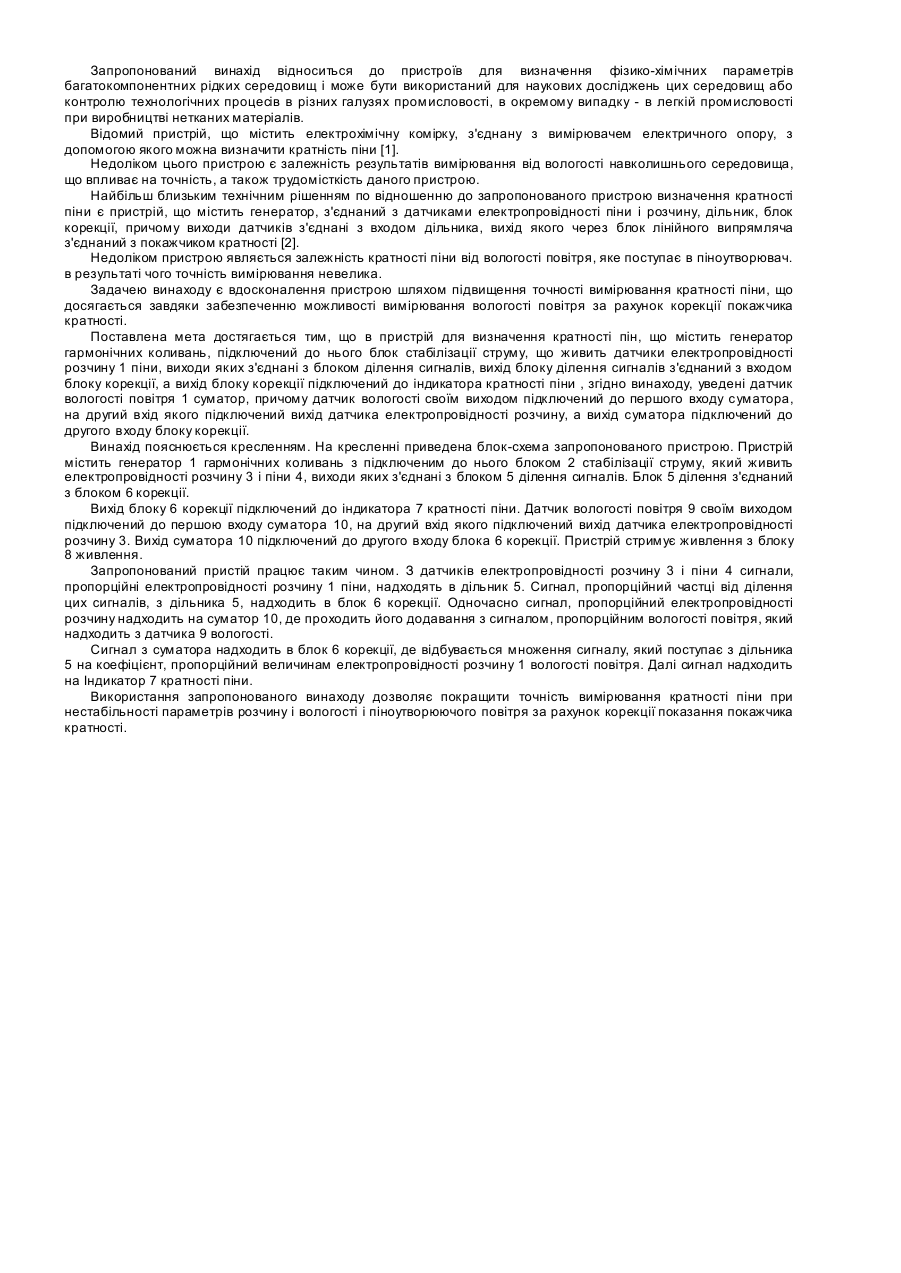
Устройство для определения кратности пен, содержащее генератор гармонических колебаний, подключенный к нему блок стабилизации тока, питающий датчики электропроводности раствора и пены. выходы которых соединены с блоком деления сигналов, выход блока деления сигналов соединен с входом блока коррекции, а выход блока коррекции подключен к индикатору кратности пены, отличающееся тем, что введены датчик влажности воздуха и сумматор, причем датчик...
Спосіб визначення кутової орієнтації об’єкта
Номер патенту: 36404
Опубліковано: 16.04.2001
Автори: Нестеренко Олег Іванович, Маринич Юрій Михайлович, Збруцький Олександр Васильович
МПК: G01C 19/00
Мітки: кутової, визначення, орієнтації, спосіб, об'єкта
Текст:
...і перпендикулярні головній осі гіроскопа, по кутам відхилення об'єкта відносно головної осі гіроскопа визначають кути і тангажу об'єкта, згідно з винаходом вводиться те, що додатково вимірюють управляючі моменти гіроскопа та визначають кут курсу за формулою: (19) UA (11) 36404 (13) A де K – кут к урсу об'єкта; M y1, M y 2 – управляючі моменти гіроскопа. 36404 K = arctg M y1 M y2 взаємоортогональних площинах у напрямку до...
Пристрій для визначення рівня та профілю поверхні матеріалів
Номер патенту: 31477
Опубліковано: 15.12.2000
Автор: Головченко Анатолій Семенович
МПК: G01F 23/28
Мітки: поверхні, визначення, рівня, матеріалів, профілю, пристрій
Текст:
...блока 8 розпізнавання сигналів ї лінії затримки 9. Блок 8 розпізнавання сигналів підключений своїми входами до виходів детекторів IL..6 блока 1 джерела мсрс;і відповідні канали лшіх затримки 9 і до виходу детектора блоки 7 приймача. Блоки джерела 1 і приймача 7 виконані нерухомими і можуть бути, об'єднані із єдиний блок. Блок 1 джерела колїмошікіш так, що формується багато вузьких пучків анігіляційного гама-внпромішощщня, які орієнтовані...
Пристрій для визначення якості ембріонів
Номер патенту: 45592
Опубліковано: 15.04.2002
Автори: Верескун Ольга Валеріївна, Мунтян Володимир Олексійович, Путятін Валерій Петрович, Мегель Юрій Євгеньович
МПК: A61D 19/04
Мітки: якості, пристрій, ембріонів, визначення
Формула / Реферат:
Пристрій для визначення якості ембріонів, який містить джерело світла для освітлення зразка ембріона у прохідному світлі, чашку Петрі зі зразком ембріона, термостат, у якому розміщено чашку Петрі, мікроскоп для одержання оптичної інформації про ембріон, при цьому мікроскоп конструктивно з'єднаний з телевізійним датчиком для кодування зображення ембріона, який відрізняється тим, що вводять блок завдання еталона ембріона, перший та другий блоки...
Попередній патент: Пристрій для експрес-контролю аритмії серця людини
Наступний патент: Процес діагностики метаболічного синдрому при цукровому діабеті 2 типу
Випадковий патент: Пневматичний насос заміщення