Спосіб контролю вільного стану рейкової лінії
Номер патенту: 76186
Опубліковано: 17.07.2006
Автори: Трубчанінова Карина Артурівна, Панченко Сергій Володимирович, Панченко Юрій Миколайович, Панченко Наталія Георгіївна
Формула / Реферат
Спосіб контролю вільного стану рейкової лінії, в якому у рейкову лінію подають і приймають з неї приймачем-передавачем сигнал контролю, визначають середнє значення його обвідної на вході приймальної частини приймача-передавача, за яким визначають вирішальну статистику у вигляді кумулятивної суми, яку порівнюють з заданим пороговим значенням, при перевищенні якого формують сигнал вільного стану рейкової лінії, у противному разі видають сигнал зайнятого стану, при вмиканні приймача-передавача перед подачею сигналу контролю в рейкову лінію подають навчальний сигнал номінального значення для визначення середнього значення обвідної сигналу, яке відповідає нормальному режиму і використовується як задане початкове значення для розрахунку кумулятивної суми, який відрізняється тим, що попереднє визначення середнього значення обвідної сигналу, яке відповідає шунтовому режиму і використовується як задане початкове значення для розрахунку кумулятивної суми, проводиться при шунтуванні входу приймальної частини приймача-передавача опором, еквівалентним нормативному опору поїзного шунта, який імітує шунт, накладений на рейкову лінію.
Текст
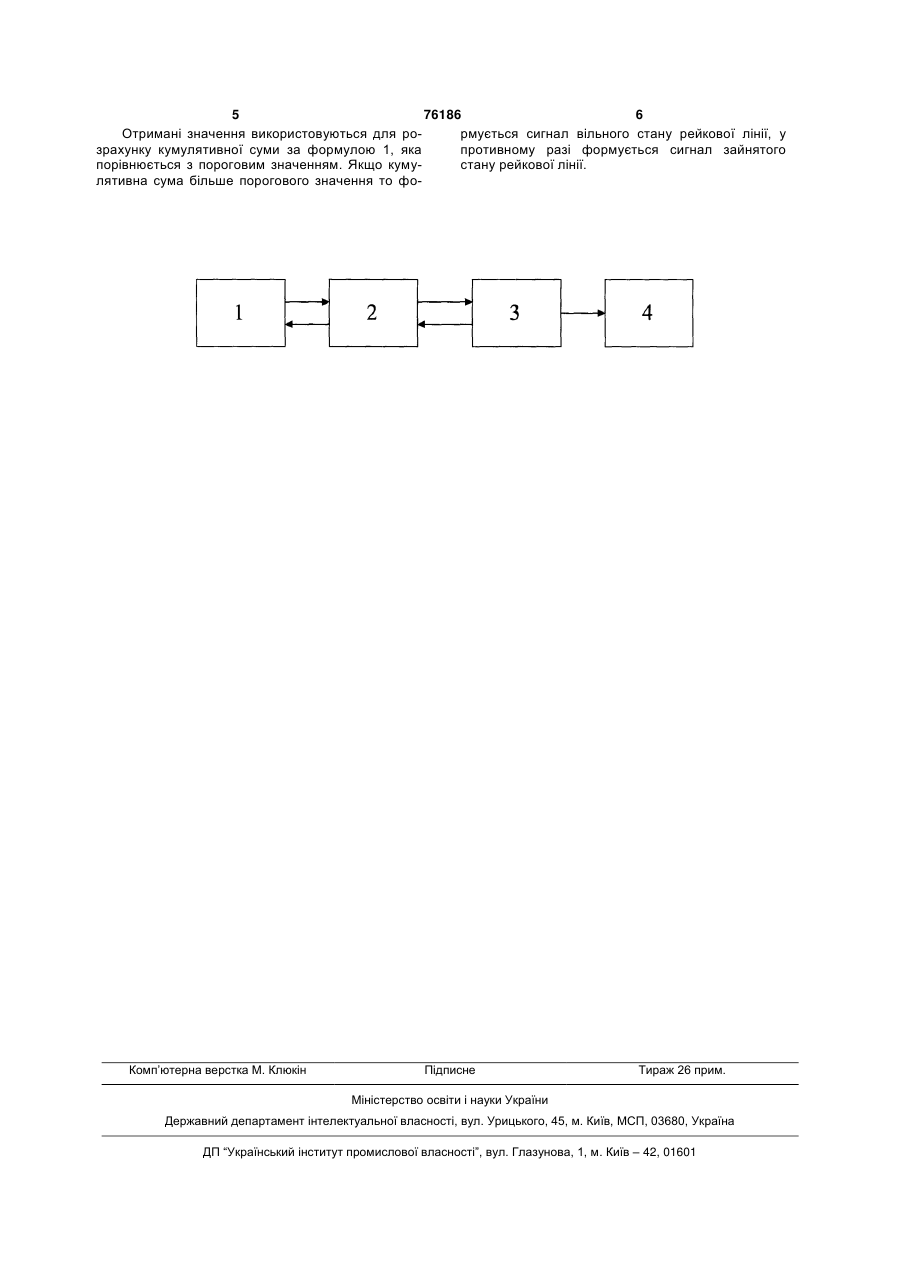
Спосіб контролю вільного стану рейкової лінії, в якому у рейкову лінію подають і приймають з неї приймачем-передавачем сигнал контролю, визначають середнє значення його обвідної на вході приймальної частини приймача-передавача, за яким визначають вирішальну статистику у вигляді 3 76186 4 налу, яке відповідає шунтовому режиму і викорис2 товується як задане початкове значення для розh,i h,i 1 h,i Yk h,i 1 n; рахунку кумулятивної суми, проводиться при шун2 2 2 (2) туванні входу приймальної частини 2 2 , h,i n h,i 1 n h,i 1 прийомопередавача опором еквівалентним нормативному опору поїзного шунта, який ніби-то накладений на рейкову лінію. де - середнє значення обвідної сигналу h,i Функціональна схема пристрою, який реалізує (h = 1 у шунтовому режимі, h = 2 у нормальному описаний спосіб контролю вільного стану рейкової режимі); лінії приведена на фігурі. 2 Прийомопередавач 3, до виходу якого підклюh,i, - дисперсія оцінки; чений елемент фіксації стану рейкової лінії 4, через пристрій захисту і поєднання 2 подає і прийYk - значення обвідної сигналу; має з рейкової лінії 1 навчальний сигнал і сигнали 2 контролю. n - дисперсія завад; Контроль вільного стану рейкової лінії виконуk, i 12,3,..., N - номер відліку сигналу. , ється наступним чином. Після вмикання живлення Недоліком такого способу контролю є те, що Прийомопередавач подає в рейкову лінію навчапри вмиканні живлення приймача необхідно задальний сигнал заданої тривалості. Навчальний сигвати початкові середні значення обвідної сигналу нал відповідає сигналу у нормальному режимі. На у шунтовому і нормальному режимах 1 і 2 . Попротязі половини тривалості навчальне сигналу стільки в якості цих середніх значень обвідної сигвизначається середнє значення обвідної сигналу у налу використовуються постійні значення, то це нормальному режимі за формулою 2. На протязі може привести до непогодження між настройкою другої половини навчального сигналу вхід прийприймача і параметрами сигналу, що призведе до мальної частини прийомопередавача шунтується невірного визначення стану рейкової лінії. опором еквівалентним нормативному опору поїзНайбільш близьким за сукупністю ознак до заного шунта, який ніби-то накладений на рейкову пропонованого винаходу є спосіб контролю вільнолінію і визначається середнє значення обвідної го стану рейкової лінії [патент RU 2112681 С1, сигналу для шунтового режиму за формулою 2. 22.09.95, В61L23/16 10.06.98, опубл. 10.06.98.], в Визначені, таким чином, середні значення обякому перед подачею сигналу контролю рейкової відних сигналу для шунтового режиму 1 і нормалінії в момент вмикання прийомопередавача вильного режиму 2 порівнюють між собою. Якщо дається навчальний сигнал заданої тривалості. різниця між ними перевищує задане порогове знаНавчальний сигнал шляхом зміни амплітуди імітує чення (навчальний сигнал подавався у вільну рейперемикання рейкового кола із нормального рекову лінію), то визначені значення обвідної сигналу жиму в шунтовий режим роботи. На вході приймальної частини прийомопередавача приймається та її середні значення 1 і 2 використовуються навчальний сигнал. Навчальний сигнал викорисдля розрахунку кумулятивної суми за формулою 1 товується для розрахунків середніх значень обвіді прийомопередавач формує сигнал вільного стану ної сигналу у нормальному і шунтовому режимах рейкової лінії. Якщо різниця між середніми значенза формулою 2. Розраховані таким чином значеннями обвідної сигналу для нормального 2 і шуння використовуються як задані початкові значення 2 для визначення кумулятивної суми за формулою 1. Завдяки цьому при подачі навчального сигналу у вільну рейкову лінію повністю усувається недолік аналога. Причини, які перешкоджають досягненню прототипом очікуваного технічного результату, полягають у наступному: при подачі навчального сигналу у зайняту рейкову лінію середні значення обвідної у нормальному і шунтовому режимах будуть різними, постільки амплітуда навчального сигналу у нормальному і шунтовому режимах буде зменшуватися пропорційно, якщо навчальний сигнал у шунтовому режимі не дорівнює нулю, а якщо дорівнює, - то навчальний сигнал у нормальному режимі буде значно відрізнятися від нульового значення. Тому величина кумулятивної суми також буде відмінною від нуля і збільшуючись може перевищити порогове значення, в наслідок чого прийомопередавач буде видавати хибний сигнал вільного стану рейкової лінії. Технічний ефект винаходу є підвищення точності контролю. Технічний ефект досягається тим, що попереднє визначення середнього значення обвідної сиг тового режиму 1 не перевищує задане порогове значення (навчальний сигнал подавався у зайняту рейкову лінію), то середнє значення обвідної сигналу для шунтового режиму 1 , визначене при шунтуванні входу приймальної частини прийомопередавача опором еквівалентним нормативному опору поїзного шунта, який ніби-то накладений на рейкову лінію, прирівнюється до середнього значення обвідної сигналу для нормального режиму 2 1 2 , визначеному без шунтування входу приймальної частини прийомопередавача. При цьому, розрахована за формулою 1, кумулятивна сума дорівнює нулю Sk 0 і прийомопередавач формує сигнал зайнятого стану рейкової лінії. Після закінчення навчального сигналу шунт з входу приймальної частини прийомопередавача відключається. На вхід прийомопередавача поступає сигнал контролю стану рейкової лінії. В приймальній частині прийомопередавача визначається значення обвідної сигналу і її середні значення у нормальному та шунтовому режимах 1 і 2 за формулою 2. 5 76186 6 Отримані значення використовуються для рормується сигнал вільного стану рейкової лінії, у зрахунку кумулятивної суми за формулою 1, яка противному разі формується сигнал зайнятого порівнюється з пороговим значенням. Якщо кумустану рейкової лінії. лятивна сума більше порогового значення то фо Комп’ютерна верстка М. Клюкін Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of checking of the free state of rail line
Автори англійськоюPanchenko Serhii Volodymyrovych
Назва патенту російськоюСпособ контроля свободного состояния рельсовой линии
Автори російськоюПанченко Сергей Владимирович
МПК / Мітки
МПК: B61L 23/00
Мітки: стану, лінії, рейкової, спосіб, контролю, вільного
Код посилання
<a href="https://ua.patents.su/3-76186-sposib-kontrolyu-vilnogo-stanu-rejjkovo-lini.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю вільного стану рейкової лінії</a>
Спосіб контролю вільного стану рейкової лінії
Номер патенту: 75979
Опубліковано: 15.06.2006
Автори: Панченко Юрій Миколайович, Трубчанінова Карина Артурівна, Мойсеєнко Валентин Іванович, Панченко Сергій Володимирович, Панченко Наталія Георгіївна
МПК: B61L 23/00
Мітки: рейкової, спосіб, контролю, вільного, стану, лінії
Формула / Реферат:
Спосіб контролю вільного стану рейкової лінії, в якому у рейкову лінію подають і приймають з неї приймачем-передавачем сигнал контролю, аналіз сигналу контролю проводять на вході приймальної частини приймача-передавача по двох каналах, в першому каналі аналізу амплітуди визначають значення обвідної сигналу і її середні значення у нормальному та шунтовому режимах, за якими визначають вирішальну статистику у вигляді кумулятивної суми, яку...
Спосіб і машина для підбивання шпал рейкової колії

Номер патенту: 72899
Опубліковано: 16.05.2005
Автори: Херберт Вьоргьоттер, Йозеф Тойрер
МПК: E01B 27/16
Мітки: колії, спосіб, підбивання, рейкової, машина, шпал
Формула / Реферат:
1. Спосіб підбивання шпал рейкової колії, причому рейкова колія (2), яку необхідно трохи підняти та підбити, обмежена двома ходовими механізмами (4) з утворенням ділянки підйому колії (19), який відрізняється тим, що в першій робочій поїздці для підйому колії та внесення щебеню під колію (2) ділянку підйому колії подовжують у поздовжньому напрямку колії, і що в наступній робочій поїздці для формування остаточного заданого положення та...
Спосіб оперативного контролю стану електричних ліній
Номер патенту: 58917
Опубліковано: 15.09.2004
Автори: Гордєєв Борис Миколайович, Жуков Юрій Даниїлович
МПК: G01R 31/08
Мітки: контролю, стану, ліній, оперативного, електричних, спосіб
Формула / Реферат:
Горілка особлива "Житомирська на бруньках золота", яка містить водно-спиртову рідину з спирту етилового ректифікованого і води питної підготовленої, ароматний спирт березових бруньок, мед натуральний, яка відрізняється тим, що додатково містить гліцерин, натрій лимоннокислий при наступному співвідношенні інгредієнтів:На 1000 дал готового продукту: Ароматний спирт березової бруньки 1,2 -1,4...
Спосіб і пристрій централізованого контролю стану об`єкта
Номер патенту: 42303
Опубліковано: 15.10.2001
Автор: Степчук Микола Петрович
МПК: G08B 13/00
Мітки: об'єкта, спосіб, пристрій, централізованого, контролю, стану
Формула / Реферат:
1. Спосіб централізованого контролю стану об'єкта, заснований на формуванні сигналу тривоги, передачі його на контролюючий об'єкт, прийомі цього сигналу, розшифровці і визначенні адреси контрольованого об'єкта, який відрізняється тим, що сигнал тривоги отримують і на контрольованому об'єкті і передають по проводовій лінії на контролюючий об'єкт, а адресу контрольованого об'єкта зчитують зі світлового індикатора дешифратора контролюючого...
Спосіб контролю числа і тривалості розмов, що відбулися по окремій абонентській лінії
Номер патенту: 5568
Опубліковано: 15.03.2005
Автори: Піскер Михайло Наумович, Єрмаков Олег Олександрович
МПК: H04M 3/22
Мітки: спосіб, розмов, контролю, абонентській, тривалості, лінії, окремий, числа, відбулися
Формула / Реферат:
Спосіб контролю числа і тривалості розмов, що відбулися по окремій абонентській лінії, що полягає в періодичному контролі сигналів про стан абонентської лінії і сигналів, що надходять від опорної АТС, який відрізняється тим, що фіксують сигнали про прийом і припинення прийому тональних сигналів контролю посилання виклику, при цьому в лічильник числа занять додають одиницю при кожній паузі в процесі посилання виклику і відраховують одиницю при...
Попередній патент: Корпус статора газової турбіни
Наступний патент: Захисний пристрій для локалізації вибуху
Випадковий патент: Штам базидіального гриба phellinus igniarius (fr.) quel. 29, який проявляє антибактеріальну активність щодо бактерій escherichia coli