Вакуумний збірний захват для деталей, що легко деформуються
Номер патенту: 76235
Опубліковано: 17.07.2006
Автори: Пашков Євген Валентинович, Селіхов Ігор Володимирович

Формула / Реферат
Вакуумний збірний захват для деталей, які легко деформуються, що містить вакуумний присосок і циліндричний корпус з каналами для підключення до вакуум-насоса або ежектора, який відрізняється тим, що присосок забезпечений ущільнювальним комірцем і змонтований з можливістю обертання на корпусі, на одному кінці якого, що знаходиться в порожнині присоска, виконана виточка під підпружинений в осьовому напрямі і зафіксований від обертання плунжер з уловлювачем захопленої деталі, а на іншому виконана циліндрична напрямна ковзання під ущільнювальний комірець присоска.
Текст
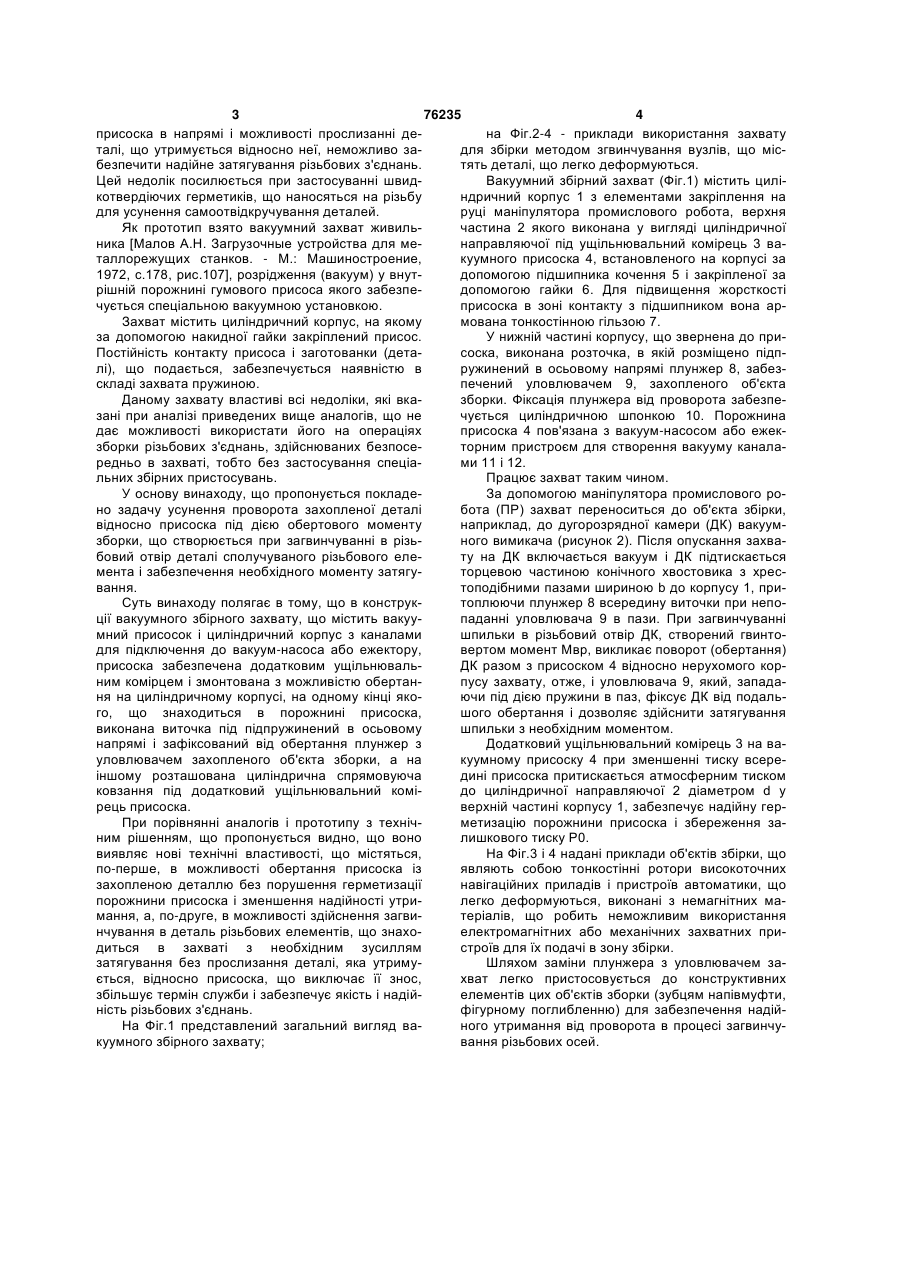
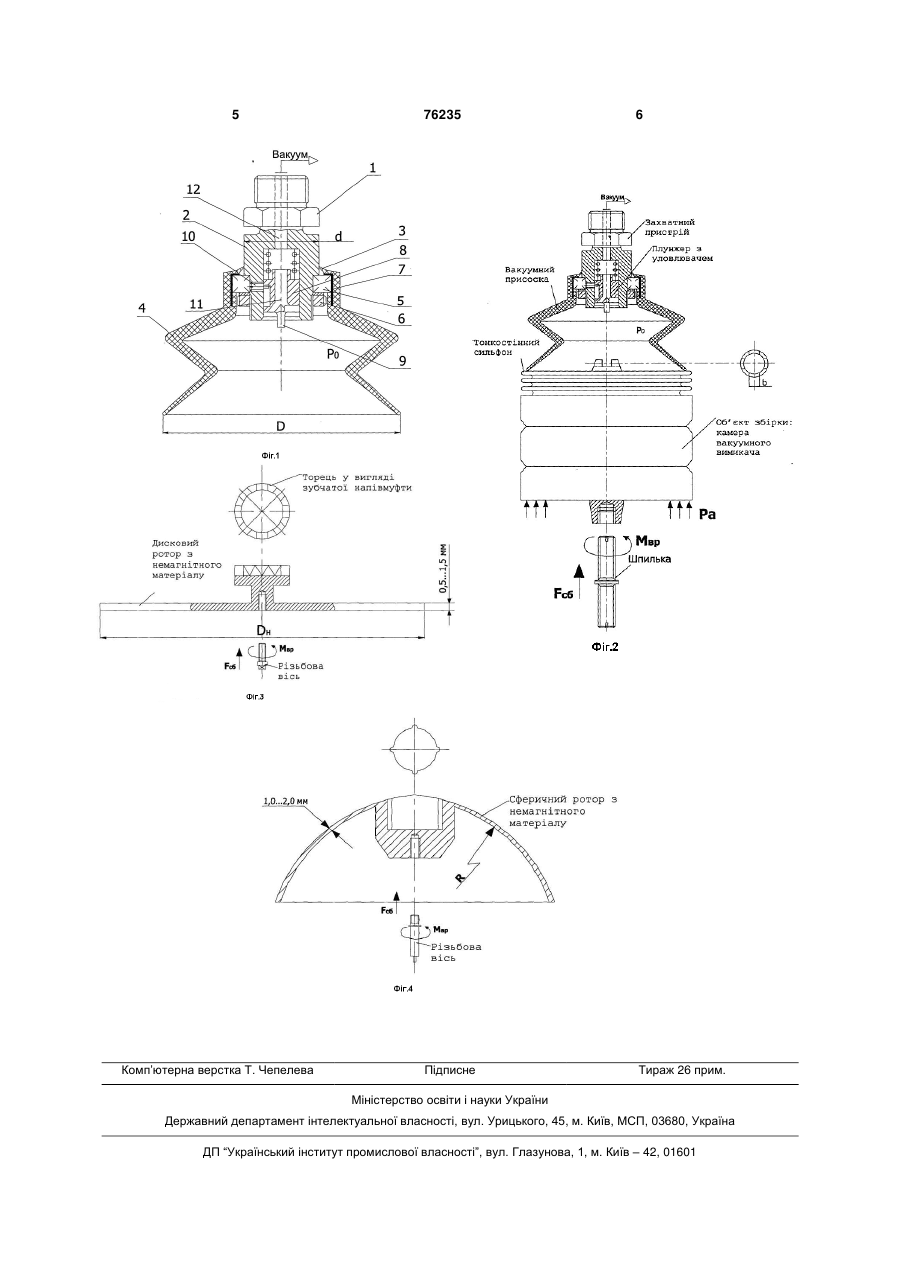
Вакуумний збірний захват для деталей, які легко деформуються, що містить вакуумний присосок і циліндричний корпус з каналами для підключення до вакуум-насоса або ежектора, який відрізняється тим, що присосок забезпечений ущільнювальним комірцем і змонтований з можливістю обертання на корпусі, на одному кінці якого, що знаходиться в порожнині присоска, виконана виточка під підпружинений в осьовому напрямі і зафіксований від обертання плунжер з уловлювачем захопленої деталі, а на іншому виконана циліндрична напрямна ковзання під ущільнювальний комірець присоска. Винахід відноситься до затискних пристроїв технологічного обладнання і, зокрема, до промислових роботів. Широко відомі вакуумні захвати, призначені для утримання в процесі маніпулювання об'єктів як складального, так і механооброблюючого виробництва, до яких відносяться, насамперед, деталі, що легко деформуються, тобто нежорсткі, а також деталі крихкі і з немагнітних матеріалів. Так, наприклад, вакуумний захватний пристрій [по а.с. SU №1187986, МКІ В25J15/06, що опубліковане в Бюл. №40 від 30.10.85p.], містить ущільнювальний елемент у вигляді трубчатого кільця із змінною товщиною стінок, порожнина якого пов'язана з джерелом тиску. Подаючи стисле повітря в порожнину кільця можна, не переміщуючи за допомогою маніпулятора весь пристрій, здійснювати деформацію стінок кільця в напрямі об'єкта захвату до входження в контакт з його поверхнею, після чого відбувається захват і утримання об'єкта. Змінюючи тиск всередині кільця можна здійснювати переміщення захопленого об'єкта, наприклад, для сполучення з іншою деталлю без переміщення маніпулятора. [У книзі Є.В.Пашкова «Электропневмоавтоматика в производственных процессах», Севастополь, Видавництво СевНТУ, 2003. -с.424-437], приведені конструкції вакуумних захватів (рисунки 7.49 і 7.50), які містять присоски плоского і сильфонного типів, встановлені на циліндричному корпусі з приєднувальними елементами для закріплення на руці маніпулятора робота. Характерна особливість приведених як аналоги конструкцій є неприпустимість проворота (обертання) захопленого об'єкта відносно присоска, оскільки це призводить до її зносу внаслідок взаємодії з мікро-нерівностями поверхні захвата, а, отже, до зниження надійності захвата. Крім того, при використанні таких захватів для збірки різьбових з'єднань, і особливо у випадках, коли зборка здійснюється в самому захваті без застосування спеціальних збірних пристроїв для установки і закріплення однієї з деталей, що збираються, через низьку жорсткість еластичного (19) UA (11) 76235 (13) C2 (21) 20040604150 (22) 01.06.2004 (24) 17.07.2006 (46) 17.07.2006, Бюл. № 7, 2006 р. (72) Пашков Євген Валентинович, Селіхов Ігор Володимирович (73) СЕВАСТОПОЛЬСЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ (56) Малов А.Н. Загрузочные устройства для металлорежущих станков. - М.: Машиностроение,1972. - С.177-179 WO 8801924 A1 24.03.1988 US 200020003352 A1 10.01.2002 GB 2239857 A 17.07.1991 GB 2296484 A 03.07.1996 EP 0616875 A1 28.09.1994 US 20030230694 A1 18.12.2003 3 76235 4 присоска в напрямі і можливості прослизанні дена Фіг.2-4 - приклади використання захвату талі, що утримується відносно неї, неможливо задля збірки методом згвинчування вузлів, що місбезпечити надійне затягування різьбових з'єднань. тять деталі, що легко деформуються. Цей недолік посилюється при застосуванні швидВакуумний збірний захват (Фіг.1) містить цилікотвердіючих герметиків, що наносяться на різьбу ндричний корпус 1 з елементами закріплення на для усунення самоотвідкручування деталей. руці маніпулятора промислового робота, верхня Як прототип взято вакуумний захват живильчастина 2 якого виконана у вигляді циліндричної ника [Малов А.Н. Загрузочные устройства для менаправляючої під ущільнювальний комірець 3 ваталлорежущих станков. - Μ.: Машиностроение, куумного присоска 4, встановленого на корпусі за 1972, с.178, рис.107], розрідження (вакуум) у внутдопомогою підшипника кочення 5 і закріпленої за рішній порожнині гумового присоса якого забезпедопомогою гайки 6. Для підвищення жорсткості чується спеціальною вакуумною установкою. присоска в зоні контакту з підшипником вона арЗахват містить циліндричний корпус, на якому мована тонкостінною гільзою 7. за допомогою накидної гайки закріплений присос. У нижній частині корпусу, що звернена до приПостійність контакту присоса і заготованки (детасоска, виконана розточка, в якій розміщено підплі), що подається, забезпечується наявністю в ружинений в осьовому напрямі плунжер 8, забезскладі захвата пружиною. печений уловлювачем 9, захопленого об'єкта Даному захвату властиві всі недоліки, які вказборки. Фіксація плунжера від проворота забезпезані при аналізі приведених вище аналогів, що не чується циліндричною шпонкою 10. Порожнина дає можливості використати його на операціях присоска 4 пов'язана з вакуум-насосом або ежекзборки різьбових з'єднань, здійснюваних безпосеторним пристроєм для створення вакууму каналаредньо в захваті, тобто без застосування спеціами 11 і 12. льних збірних пристосувань. Працює захват таким чином. У основу винаходу, що пропонується покладеЗа допомогою маніпулятора промислового роно задачу усунення проворота захопленої деталі бота (ПР) захват переноситься до об'єкта збірки, відносно присоска під дією обертового моменту наприклад, до дугорозрядної камери (ДК) вакуумзборки, що створюється при загвинчуванні в різьного вимикача (рисунок 2). Після опускання захвабовий отвір деталі сполучуваного різьбового елету на ДК включається вакуум і ДК підтискається мента і забезпечення необхідного моменту затягуторцевою частиною конічного хвостовика з хресвання. топодібними пазами шириною b до корпусу 1, приСуть винаходу полягає в тому, що в конструктоплюючи плунжер 8 всередину виточки при непоції вакуумного збірного захвату, що містить вакуупаданні уловлювача 9 в пази. При загвинчуванні мний присосок і циліндричний корпус з каналами шпильки в різьбовий отвір ДК, створений гвинтодля підключення до вакуум-насоса або ежектору, вертом момент Мвр, викликає поворот (обертання) присоска забезпечена додатковим ущільнювальДК разом з присоском 4 відносно нерухомого корним комірцем і змонтована з можливістю обертанпусу захвату, отже, і уловлювача 9, який, западаня на циліндричному корпусі, на одному кінці якоючи під дією пружини в паз, фіксує ДК від подальго, що знаходиться в порожнині присоска, шого обертання і дозволяє здійснити затягування виконана виточка під підпружинений в осьовому шпильки з необхідним моментом. напрямі і зафіксований від обертання плунжер з Додатковий ущільнювальний комірець 3 на вауловлювачем захопленого об'єкта зборки, а на куумному присоску 4 при зменшенні тиску всереіншому розташована циліндрична спрямовуюча дині присоска притискається атмосферним тиском ковзання під додатковий ущільнювальний комідо циліндричної направляючої 2 діаметром d у рець присоска. верхній частині корпусу 1, забезпечує надійну герПри порівнянні аналогів і прототипу з технічметизацію порожнини присоска і збереження заним рішенням, що пропонується видно, що воно лишкового тиску Р0. виявляє нові технічні властивості, що містяться, На Фіг.3 і 4 надані приклади об'єктів збірки, що по-перше, в можливості обертання присоска із являють собою тонкостінні ротори високоточних захопленою деталлю без порушення герметизації навігаційних приладів і пристроїв автоматики, що порожнини присоска і зменшення надійності утрилегко деформуються, виконані з немагнітних мамання, а, по-друге, в можливості здійснення загвитеріалів, що робить неможливим використання нчування в деталь різьбових елементів, що знахоелектромагнітних або механічних захватних придиться в захваті з необхідним зусиллям строїв для їх подачі в зону збірки. затягування без прослизання деталі, яка утримуШляхом заміни плунжера з уловлювачем зається, відносно присоска, що виключає її знос, хват легко пристосовується до конструктивних збільшує термін служби і забезпечує якість і надійелементів цих об'єктів зборки (зубцям напівмуфти, ність різьбових з'єднань. фігурному поглибленню) для забезпечення надійНа Фіг.1 представлений загальний вигляд ваного утримання від проворота в процесі загвинчукуумного збірного захвату; вання різьбових осей. 5 Комп’ютерна верстка Т. Чепелева 76235 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюVacuum composite grip for highly deformable components
Автори англійськоюPashkov Yevhen Valentynovych
Назва патенту російськоюВакуумный сборный захват для легкодеформируемых деталей
Автори російськоюПашков Евгений Валентинович
МПК / Мітки
МПК: B25J 15/06
Мітки: збірний, деформуються, вакуумний, легко, деталей, захват
Код посилання
<a href="https://ua.patents.su/3-76235-vakuumnijj-zbirnijj-zakhvat-dlya-detalejj-shho-legko-deformuyutsya.html" target="_blank" rel="follow" title="База патентів України">Вакуумний збірний захват для деталей, що легко деформуються</a>
Вакуумний захват

Номер патенту: 44082
Опубліковано: 15.01.2002
Автори: Драпак Георгій Мефодійович, Скиба Микола Єгорович, Васьков Віктор Михайлович
МПК: B66C 1/00, A43D 11/00
Формула / Реферат:
Вакуумний захват, який містить корпус, керуючий елемент, встановлений з можливістю переміщення, та захватну плиту, який відрізняється тим, що керуючий елемент виконано у вигляді жорсткого гнутого стрижня, оснащеного всередині отвором, що починається до його згину, з можливістю послідовного з'єднання отворів захватної плити з джерелом вакууму, а захватна плита виконана з можливістю деформування.
Захват для тари пляшкового типу
Номер патенту: 48560
Опубліковано: 15.08.2002
Автори: Грисенко Микола Архипович, Корчменюк Олександр Іванович
МПК: B67B 7/00, B65D 23/10
Мітки: пляшкового, захват, тари, типу
Формула / Реферат:
Захват для тари пляшкового типу, що містить пелюстковий кільцевий затиск для кріплення на горловині тари, з’єднаний з рукояткою, який відрізняється тим, що в середній частині рукоятки виконане кільце з внутрішніми рифлями.
Захват для трубчастих зразків
Номер патенту: 9044
Опубліковано: 15.09.2005
Автор: Тормахов Микола Миколайович
МПК: G01N 3/04
Мітки: захват, зразків, трубчастих
Формула / Реферат:
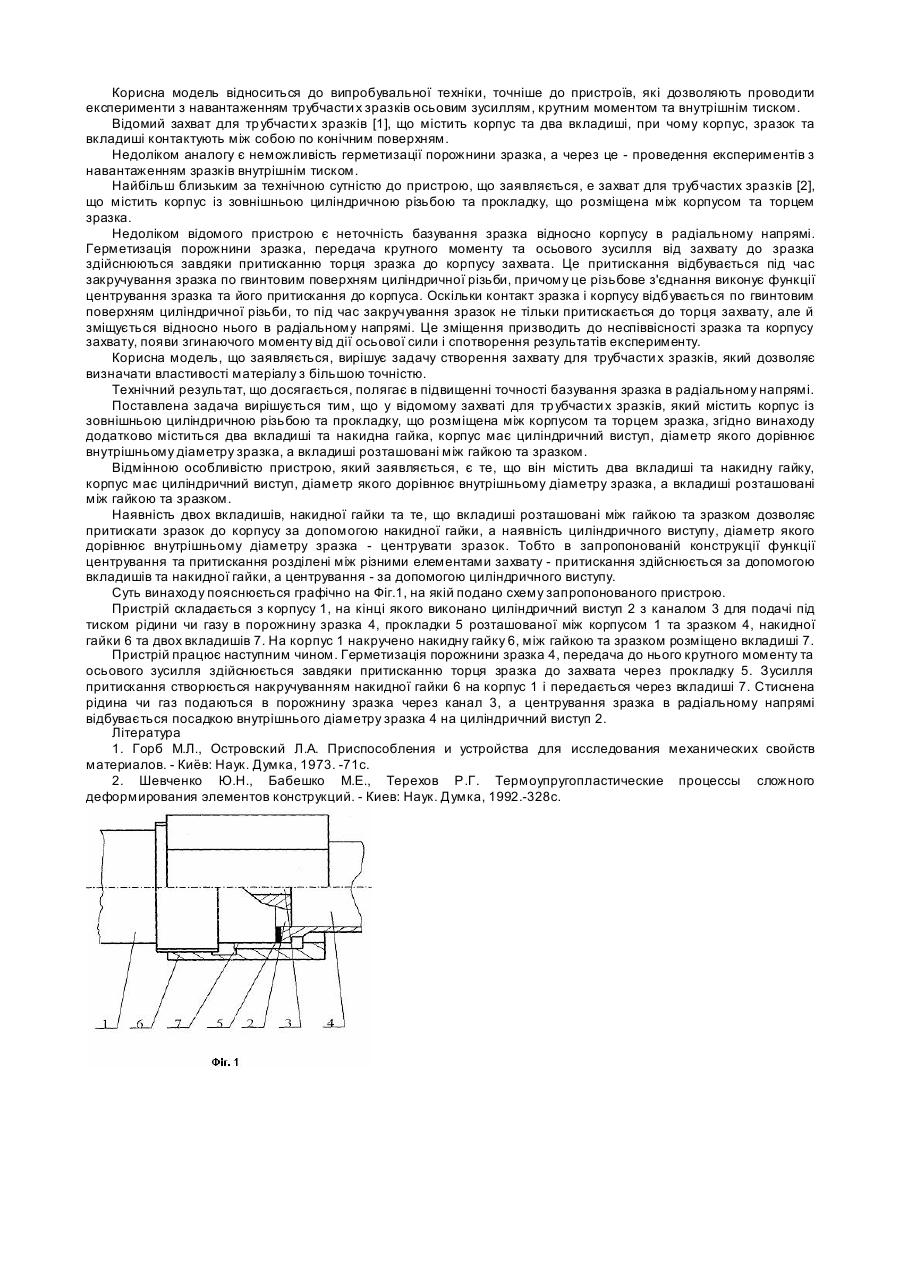
Захват для трубчастих зразків, який містить корпус із зовнішньою циліндричною різьбою та прокладку, що розміщена між корпусом та торцем зразка, який відрізняється тим, що він додатково містить два вкладиші та накидну гайку, корпус має циліндричний виступ, діаметр якого дорівнює внутрішньому діаметру зразка, а вкладиші розташовані між гайкою та зразком.
Важільно-механічний двопальцьовий захват
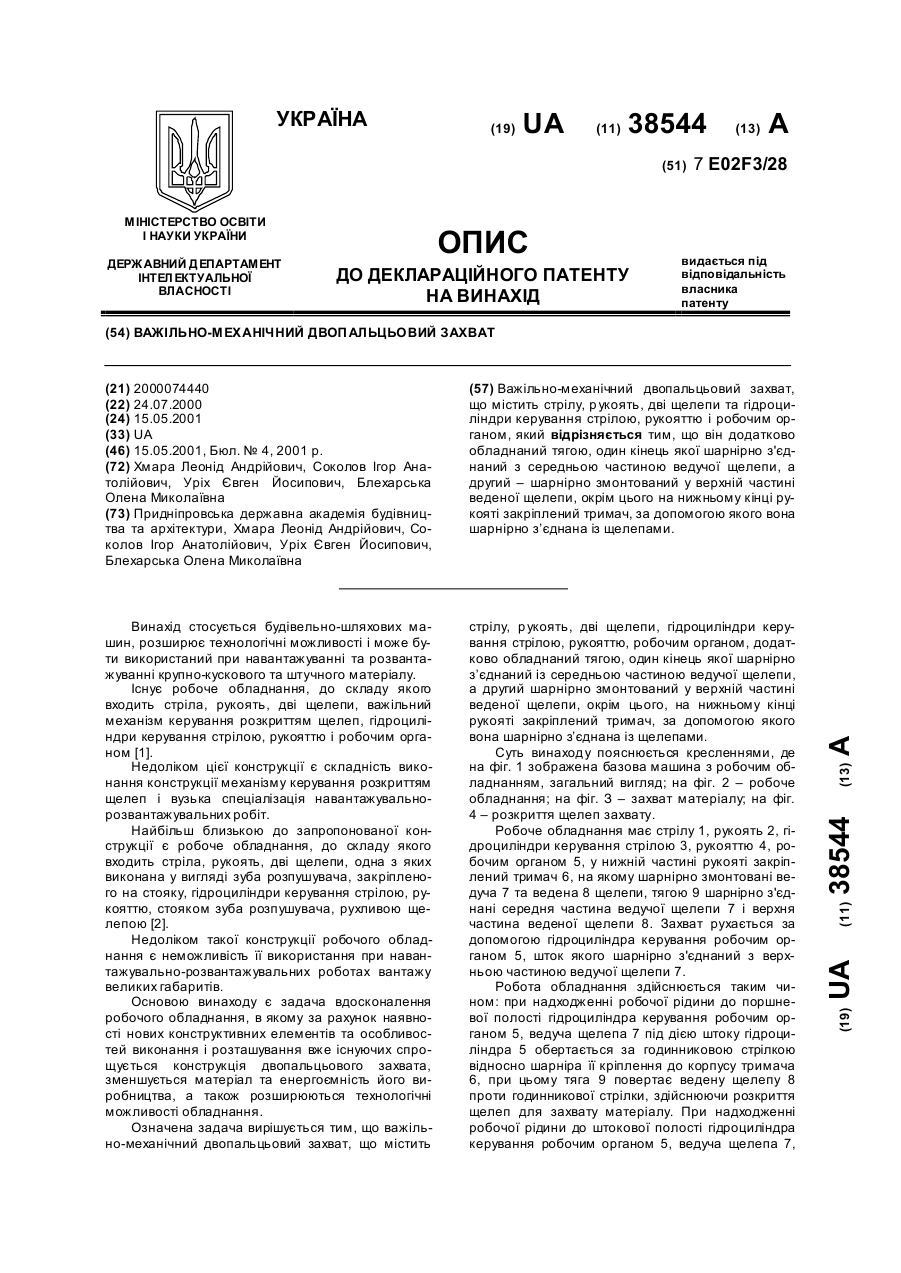
Номер патенту: 38544
Опубліковано: 15.05.2001
Автори: Уріх Євген Йосипович, Соколов Ігор Анатолійович, Хмара Леонід Андрійович, Блехарська Олена Миколаївна
МПК: E02F 3/28
Мітки: двопальцьовий, захват, важільно-механічний
Текст:
...Блехарська Олена Миколаївна 38544 обертаючись проти годинникової стрілки, за допомогою тяги 9 обертає ведену щелепу 8 за годинниковою стрілкою відносно шарніра її кріплення до корпусу тримача 6, при цьому відбувається захват матеріалу та його утримання в щелепах захвату. Використання важільно-механічного двопальцьового захвату дозволяє спростити конструкцію захвату, розширити технологічні можливості робочого обладнання. Джерела...
Захват для механічних випробувань тонкостінних трубчастих взірців
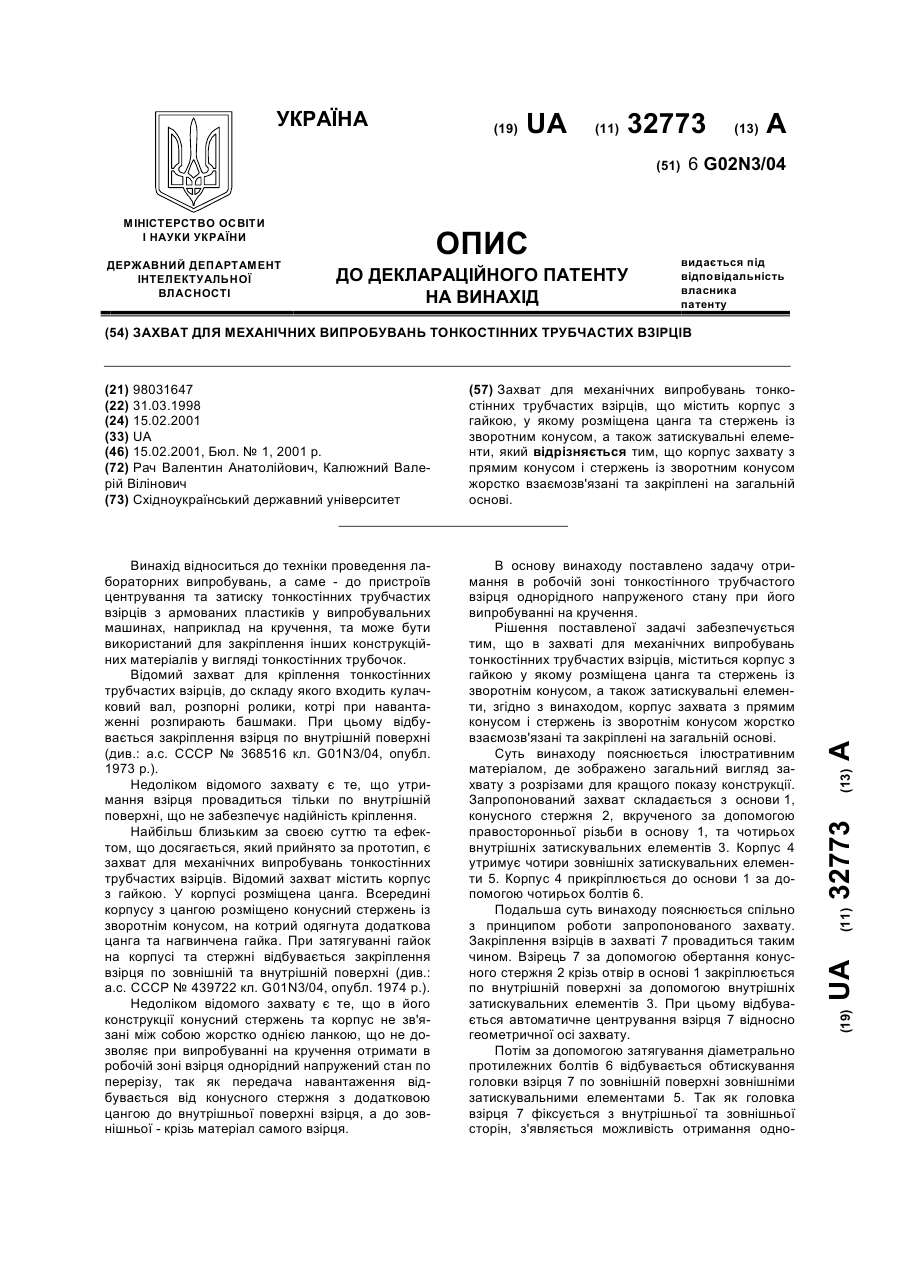
Номер патенту: 32773
Опубліковано: 15.02.2001
Автори: Рач Валентин Анатолійович, Калюжний Валерій Вілінович
МПК: G01N 3/04
Мітки: трубчастих, випробувань, механічних, взірців, захват, тонкостінних
Формула / Реферат:
Захват для механічних випробувань тонкостінних трубчастих взірців, що містить корпус з гайкою, у якому розміщена цанга та стержень із зворотним конусом, а також затискувальні елементи, який відрізняється тим, що корпус захвату з прямим конусом і стержень із зворотним конусом жорстко взаємозв'язані та закріплені на загальній основі.
Попередній патент: Рідке азотно-калійне добриво
Наступний патент: Спосіб отримання шорсткої поверхні
Випадковий патент: Пристрій для виміру деформації вигину на деталях, що обертаються