Вакуумний захват
Номер патенту: 44082
Опубліковано: 15.01.2002
Автори: Драпак Георгій Мефодійович, Скиба Микола Єгорович, Васьков Віктор Михайлович

Формула / Реферат
Вакуумний захват, який містить корпус, керуючий елемент, встановлений з можливістю переміщення, та захватну плиту, який відрізняється тим, що керуючий елемент виконано у вигляді жорсткого гнутого стрижня, оснащеного всередині отвором, що починається до його згину, з можливістю послідовного з'єднання отворів захватної плити з джерелом вакууму, а захватна плита виконана з можливістю деформування.
Текст
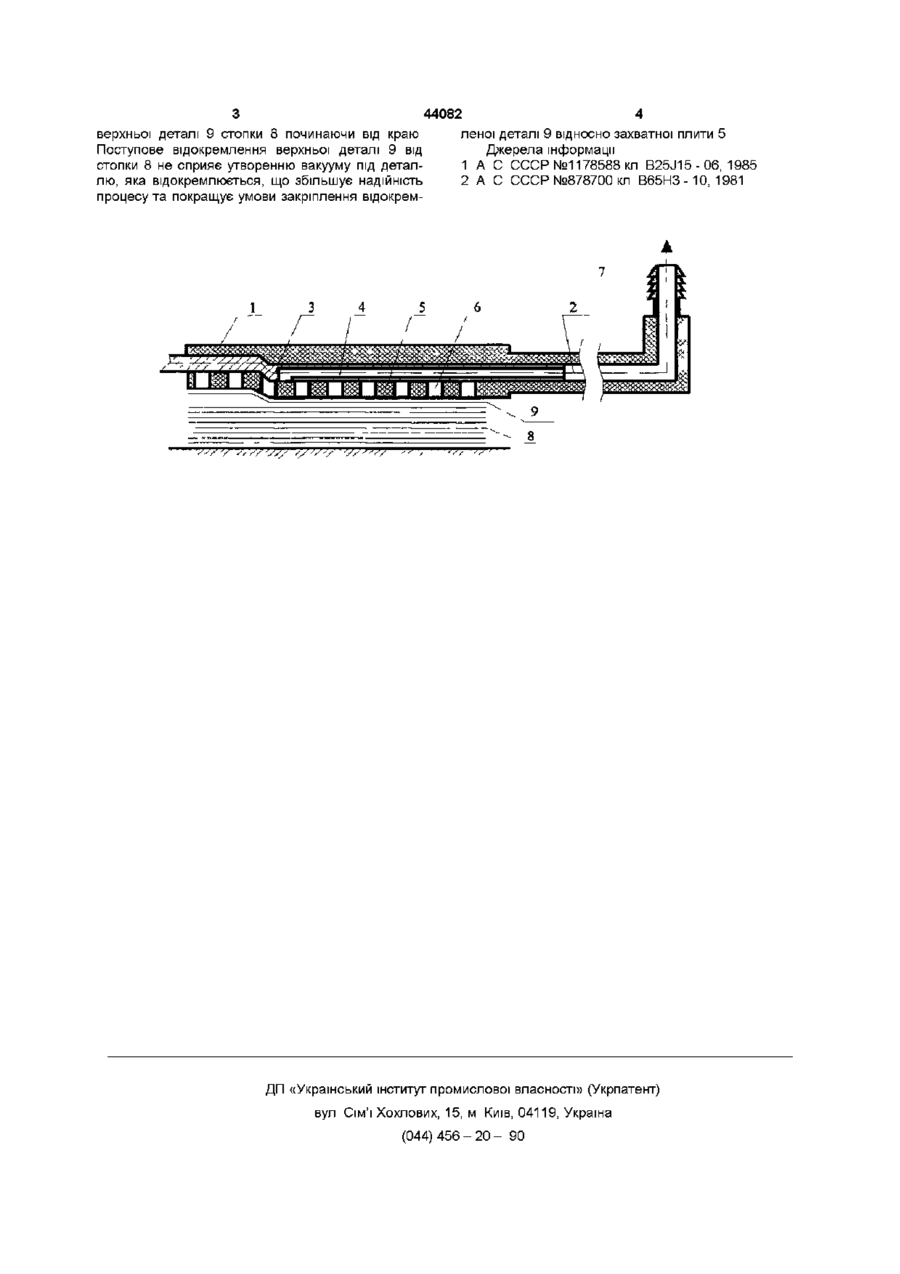
Вакуумний захват, який містить корпус, керуючий елемент, встановлений з можливістю пере міщення, та захватну плиту, який відрізняється тим, що керуючий елемент виконано у вигляді жорсткого гнутого стрижня, оснащеного всередині отвором, що починається до його згину, з можливістю послідовного з'єднання отворів захватної плити з джерелом вакууму, а захватна плита виконана з можливістю деформування Винахід відноситься до взуттєвої промисловості та призначений для використання у пристроях, що захоплюють та відокремлюють деталі від стопки при автоматизації виробництва заготовок верху взуття Відомо вакуумний пристрій для захоплення плоских деталей, який містить корпус з пневмокамерою, стінка якої має наскрізні канали та вакуумні присоски, що встановлені на виході каналів з зовнішньої сторони стінки пневмокамери [1] Недоліком відомого пристрою є низька надійність відокремлення деталей від стопки в наслідок утворення вакууму під деталлю, що відокремлюється одночасно по всій площі Найбільш близьким до об'єкту, що заявляється є пристрій, який містить концентричне змонтовані на опорі барабани, внутрішній із яких має камери ВІДПОВІДНО пониженого та підвищеного тиску, а ЗОВНІШНІЙ - ряди отворів, розміщених по його твірних та має встановлений між внутрішнім та ЗОВНІШНІМИ барабанами додатковий барабан з низкою наскрізних отворів, які з'єднують ВІДПОВІДНІ камери внутрішнього барабану з отворами зовнішнього барабана [2] Недоліком цього пристрою є недостатня точність фіксування деталей, що відокремлюються відносно опорної поверхні захватного органу В основу винаходу поставлено завдання збільшення точності фіксації деталі на опорної поверхні захватного органу Поставлене завдання досягається тим, що вакуумний захват, який містить корпус, керуючий елемент, встановлений з можливістю переміщення та захватну плиту, ВІДПОВІДНО ДО запропонова ного винаходу, керуючий елемент виконано у вигляді жорсткого гнутого стрижня оснащеного всередині отвором, що починається до його згину з можливістю послідовного з'єднання отворів захватної плити з джерелом вакууму, а захватна плита виконана з можливістю деформування На фіг зображено процес захоплення деталі вакуумним захватом Вакуумний захват містить корпус 1 з наскрізним отвором 2, керуючий елемент 3, виконаний у вигляді жорсткого гнутого стрижня, оснащеного отвором 4, захватну плиту 5, виконану з можливістю деформування з отворами 6 та штуцером 7, що з'єднується з наскрізним отвором 2 Пристрій працює таким чином Захват наближується до стопки деталей 8 та контактує захватною плитою 5 з верхньою деталлю 9 стопки 8 Після чого до штуцера 7 підводиться вакуум, під дією якого відбувається переміщення керуючого елементу 3 в напрямку штуцера 7 Через отвір 4 керуючого елемента при його переміщенні вакуум послідовно підводиться до отворів 6 у захватній плиті 5 і відбувається поступове вакуумне захоплення верхньої деталі 9 стопки 8 Отвори 6 спочатку послідовно з'єднуючись з вакуумом поступово присмоктують верхню деталь 9 до захватної плити 5, а при подальшому переміщенні керуючого елемента 3, вакуум перекривається і верхня деталь 9 надійно закріплюється на захватній плиті 5 Керуючий елемент переміщуючись вздовж стопки 8 за рахунок власної кривини одночасно вигинає догори захватну плиту 5 і поступово піднімає її відносно стопки 8, що призводить до поступового відокремлення попередньо надійно захопленої 00 о верхньої деталі 9 стопки 8 починаючи від краю Поступове відокремлення верхньої деталі 9 від стопки 8 не сприяє утворенню вакууму під деталлю, яка відокремлюється, що збільшує надійність процесу та покращує умови закріплення відокрем 44082 4 леної деталі 9 відносно захватної плити 5 Джерела інформації 1 А С СССР №1178588 кл B25J15 - 06, 1985 2 А С СССР №878700 кл В65НЗ -10, 1981 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044) 456 - 20 - 90
ДивитисяДодаткова інформація
Автори англійськоюDrapak Heorhii Mefodiiovych, Skyba Mykola Yehorovych
Автори російськоюДрапак Георгий Мефодьевич, Скиба Николай Егорович
МПК / Мітки
МПК: A43D 11/00, B66C 1/00
Код посилання
<a href="https://ua.patents.su/2-44082-vakuumnijj-zakhvat.html" target="_blank" rel="follow" title="База патентів України">Вакуумний захват</a>
Штирьовий захват до навантажувача
Номер патенту: 3759
Опубліковано: 27.12.1994
Автор: Рахманов Микола Миколайович
МПК: B66F 9/18
Мітки: штирьовий, захват, навантажувача
Формула / Реферат:
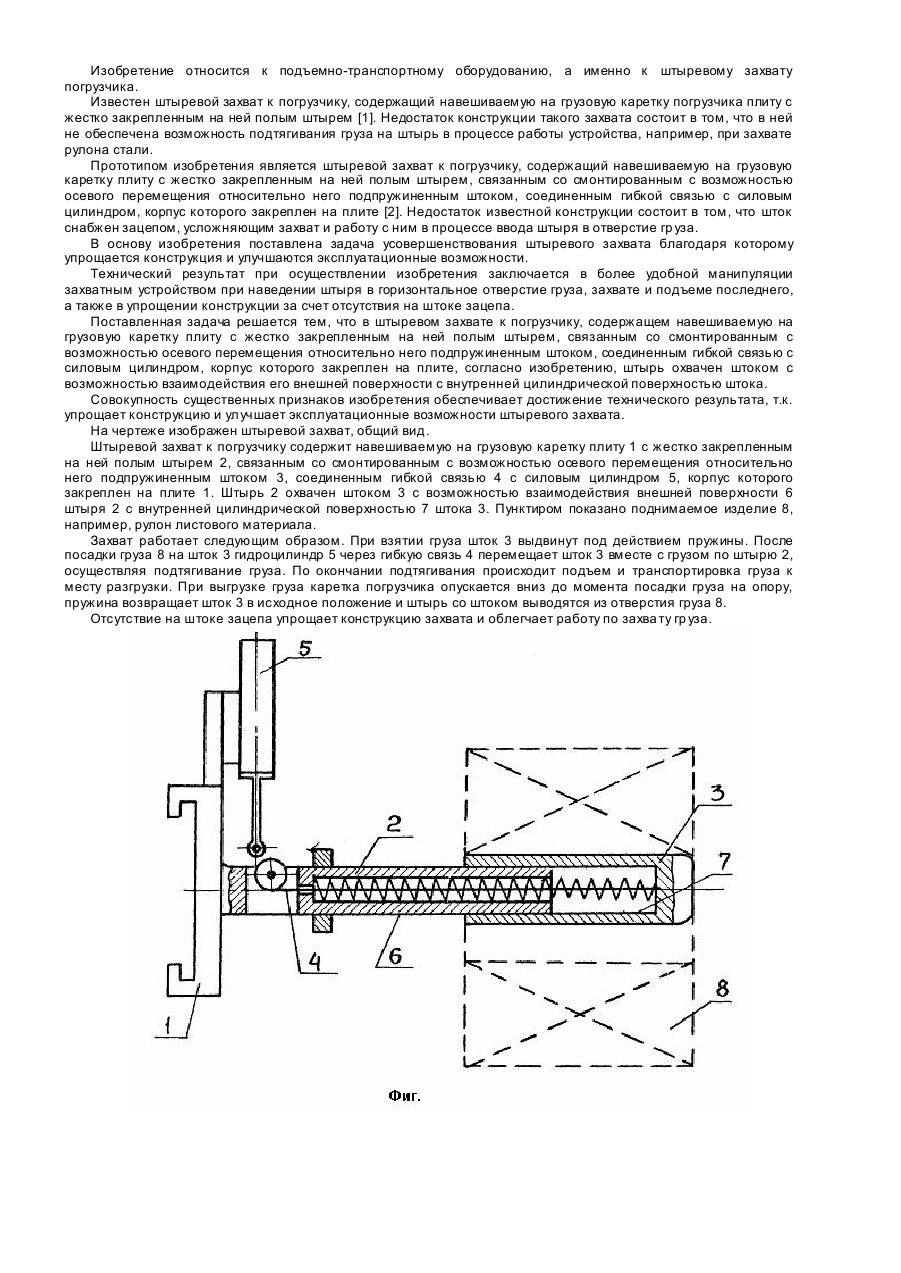
Штыревой захват к погрузчику, содержащий навешиваемую на грузовую каретку плиту с жестко закрепленным на ней полым штырем, связанным со смонтированным с возможностью осевого перемещения относительно него подпружиненным штоком, соединенным гибкой связью с силовым цилиндром, корпус которого закреплен на плите, отличающийся тем, что штырь охвачен указанным штоком с возможностью взаимодействия его внешней поверхности с внутренней цилиндрической...
Кліщовий захват захоплювальної балки

Номер патенту: 704
Опубліковано: 15.12.2000
Автор: Ільяшенко Леонід Петрович
МПК: B66C 1/62
Мітки: захоплювальної, кліщовий, захват, балки
Формула / Реферат:
Кліщовий захват захоплювальної балки, що містить корпус із симетрично встановленими в ньому на осях клішнями і запірним клином, керуючий важіль, що розміщений між напрямними, шарнірно з'єднаний із запірним клином, противагу, що жорстко закріплена на одному кінці керуючого важеля і підвішена на гнучкому елементі до захоплювальної балки, між противагою і запірним клином установлений висувний упор, а на другому кінці керуючого важеля закріплений...
Вакуумний схват

Номер патенту: 33533
Опубліковано: 15.02.2001
Автори: Романець Тарас Петрович, Драпак Георгій Мефодійович
МПК: B25J 15/06
Текст:
...як деталі 16 досягнуть присмок тувачів 11 обох пневмокамер, тиск в пневмокамерах 9 і 10 знімається, і сильфони 13 під дією пружних сил розтискаються. При цьому присмоктувачі 11 захоплюють верхню деталь стопи. Після чого схва т починає рухатись догори, а блок штанг 5, 6 (фіг. 3) повертається в шарнірі 2 за годинниковою стрілкою у бік більшого плеча "В" штанг 5, 6. При цьому відбувається відгинання догори краю захопленої присмоктувачами 11...
Захват для дрібноштучних пакетів
Номер патенту: 40197
Опубліковано: 16.07.2001
Автор: Коломієць Володимир Михайлович
МПК: B66C 1/22
Мітки: дрібноштучних, пакетів, захват
Формула / Реферат:
Захват для дрібноштучних пакетів, який містить раму з закріпленими на ній огороджувальною стінкою, вантажозахватні петлі, підхватні штирі, який відрізняється тим, що до рами шарнірно приєднані висувні пальці, на які підвішується запобіжний кошик з різними за висотою стінками, при цьому огороджувальна стінка захвата забезпечена П-образними виступами.
Вилочний захват для навантажувача
Номер патенту: 5421
Опубліковано: 28.12.1994
Автори: Зінько Роман Володимирович, Козлинський Мирослав Петрович
МПК: B66F 9/12
Мітки: вилочний, навантажувача, захват
Формула / Реферат:
(57) Вилочный захват для погрузчика, содержащий каретку, монтируемую на грузоподьмнике погрузчика и несущую вилы, смонтированныес возможностью синхронного вращения их зубьев навстречу друг другу зубчато-реечным механизмом, образованным шестернями, жестко закрепленными на осях вращения указан ных зубьев вил и зацепленных с зубчатыми рейками, выполненными на противолежащих сторонах, установленной с возможностью поперечного...
Попередній патент: Ливарна форма для термопластів
Наступний патент: Лижа
Випадковий патент: Спосіб визначення характеристики перетворення пристрою для визначення параметрів рідких і сипких середовищ