Цифровий радіограф
Номер патенту: 76811
Опубліковано: 15.09.2006
Автори: Братчук Денис Володимирович, Свищ Володимир Митрофанович, Петренко Василь Іванович, Чубенко Едуард Васильович

Формула / Реферат
Цифровий радіограф, який містить джерело рентгенівського випромінювання з коліматором, систему переміщення, механічно з'єднану з об'єктом контролю, крізь який джерело рентгенівського випромінювання оптично зв'язане з лінійкою приймачів рентгенівського випромінювання, виходи яких підключені до відповідних входів комутатора з підсилювачем та аналого-цифровим перетворювачем, який підключений до ЕОМ, який відрізняється тим, що додатково введений привід лінійки приймачів рентгенівського випромінювання з можливістю здійснення у площині рентгенівського випромінювання зворотно-поступального руху, напрям якого є перпендикулярним вектору швидкості переміщення об'єкта контролю, керуючий вхід приводу лінійки приймачів рентгенівського випромінювання з'єднаний з ЕОМ, а його вихід механічно з'єднаний з лінійкою приймачів рентгенівського випромінювання.
Текст
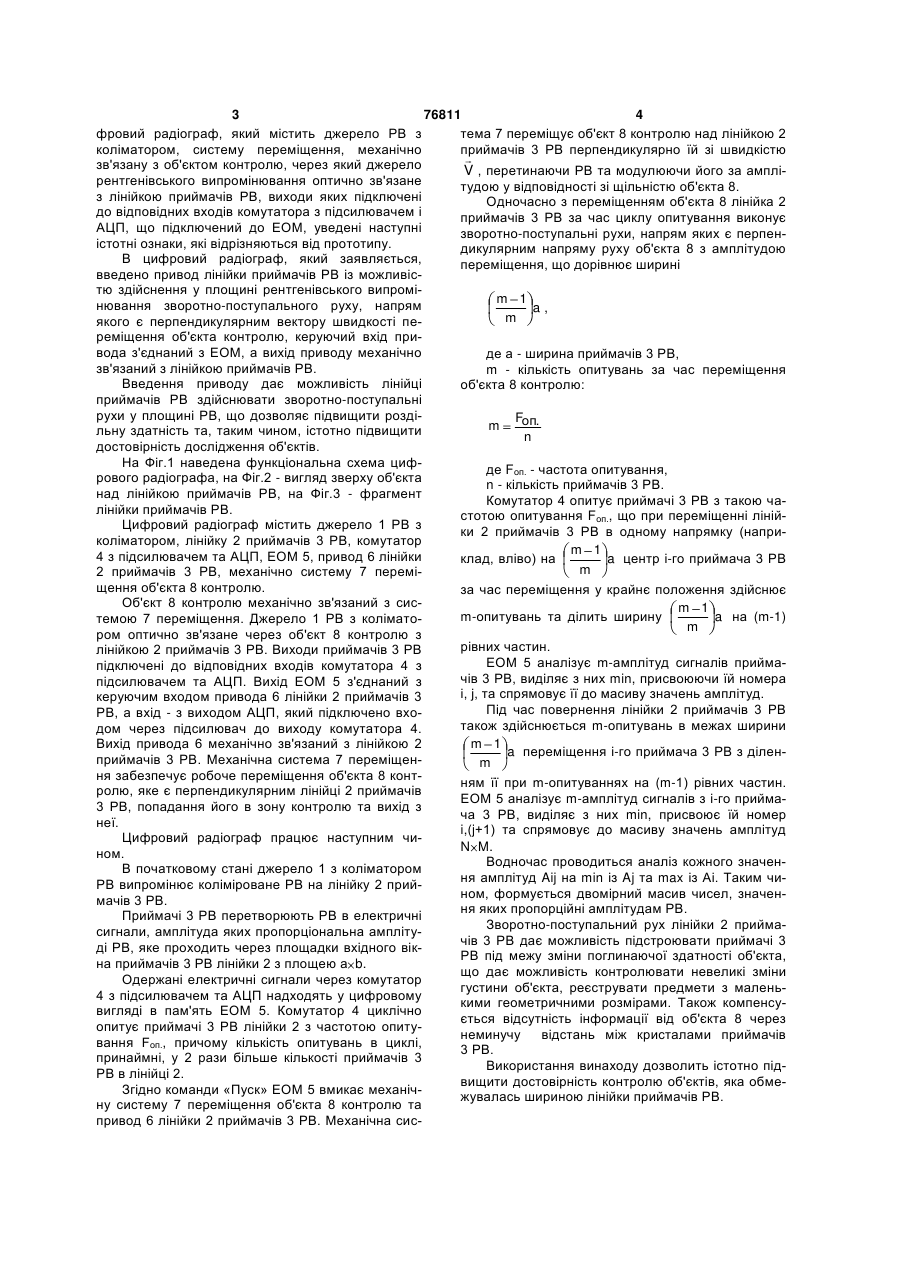
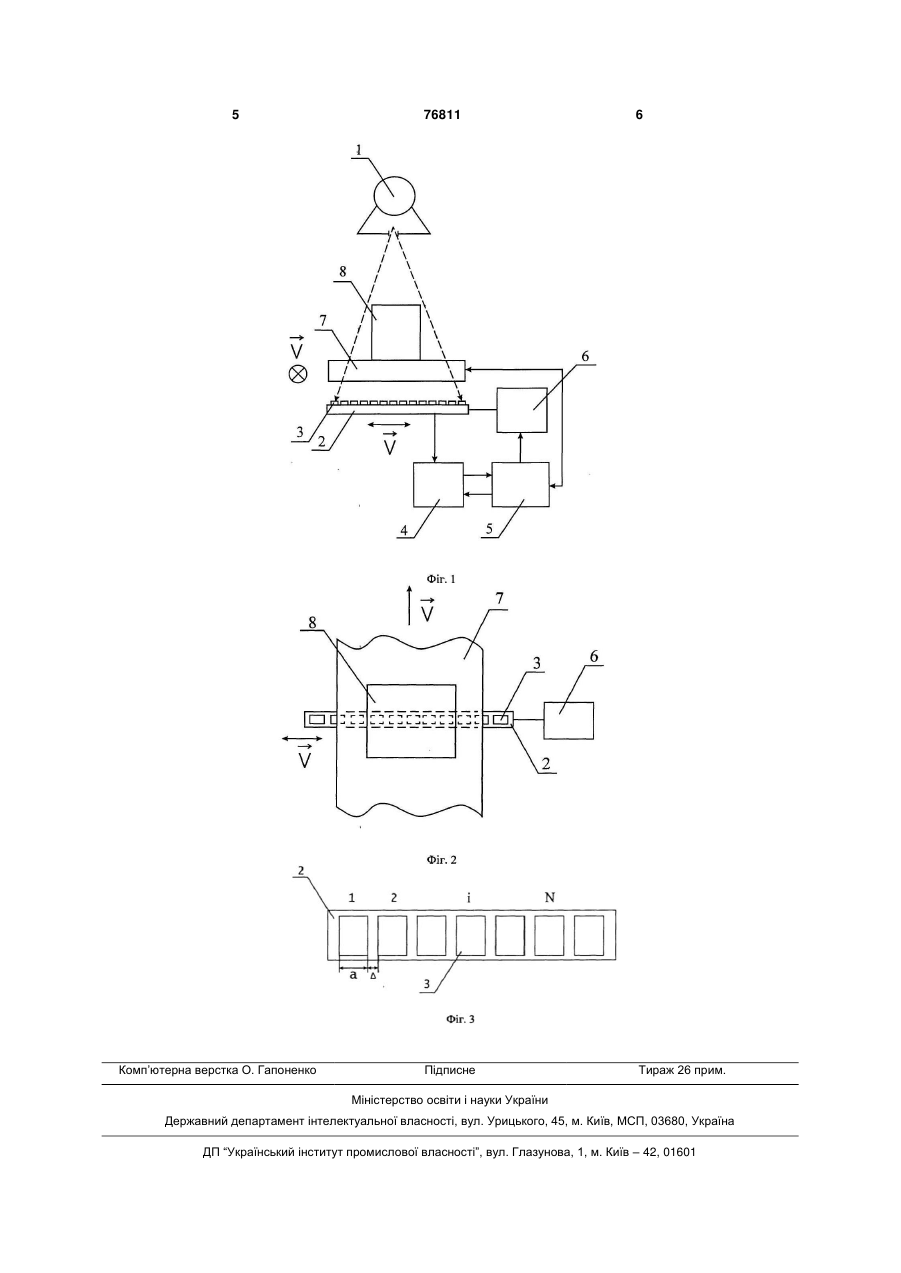
Цифровий радіограф, який містить джерело рентгенівського випромінювання з коліматором, 3 76811 4 фровий радіограф, який містить джерело РВ з тема 7 переміщує об'єкт 8 контролю над лінійкою 2 коліматором, систему переміщення, механічно приймачів 3 РВ перпендикулярно їй зі швидкістю зв'язану з об'єктом контролю, через який джерело V , перетинаючи РВ та модулюючи його за амплірентгенівського випромінювання оптично зв'язане тудою у відповідності зі щільністю об'єкта 8. з лінійкою приймачів РВ, виходи яких підключені Одночасно з переміщенням об'єкта 8 лінійка 2 до відповідних входів комутатора з підсилювачем і приймачів 3 РВ за час циклу опитування виконує АЦП, що підключений до ЕОМ, уведені наступні зворотно-поступальні рухи, напрям яких є перпеністотні ознаки, які відрізняються від прототипу. дикулярним напряму руху об'єкта 8 з амплітудою В цифровий радіограф, який заявляється, переміщення, що дорівнює ширині введено привод лінійки приймачів РВ із можливістю здійснення у площині рентгенівського випроміm 1 нювання зворотно-поступального руху, напрям a, m якого є перпендикулярним вектору швидкості переміщення об'єкта контролю, керуючий вхід привода з'єднаний з ЕОМ, а вихід приводу механічно де а - ширина приймачів 3 РВ, зв'язаний з лінійкою приймачів РВ. m - кількість опитувань за час переміщення Введення приводу дає можливість лінійці об'єкта 8 контролю: приймачів РВ здійснювати зворотно-поступальні рухи у площині РВ, що дозволяє підвищити роздіFоп. m льну здатність та, таким чином, істотно підвищити n достовірність дослідження об'єктів. На Фіг.1 наведена функціональна схема цифде Fоп. - частота опитування, рового радіографа, на Фіг.2 - вигляд зверху об'єкта n - кількість приймачів 3 РВ. над лінійкою приймачів РВ, на Фіг.3 - фрагмент Комутатор 4 опитує приймачі 3 РВ з такою чалінійки приймачів РВ. стотою опитування Fоп., що при переміщенні лінійЦифровий радіограф містить джерело 1 РВ з ки 2 приймачів 3 РВ в одному напрямку (наприколіматором, лінійку 2 приймачів 3 РВ, комутатор m 1 4 з підсилювачем та АЦП, ЕОМ 5, привод 6 лінійки клад, вліво) на a центр i-го приймача 3 РВ m 2 приймачів 3 РВ, механічно систему 7 переміщення об'єкта 8 контролю. за час переміщення у крайнє положення здійснює Об'єкт 8 контролю механічно зв'язаний з сисm 1 m-опитувань та ділить ширину a на (m-1) темою 7 переміщення. Джерело 1 РВ з коліматоm ром оптично зв'язане через об'єкт 8 контролю з рівних частин. лінійкою 2 приймачів 3 РВ. Виходи приймачів 3 РВ ЕОМ 5 аналізує m-амплітуд сигналів приймапідключені до відповідних входів комутатора 4 з чів 3 РВ, виділяє з них min, присвоюючи їй номера підсилювачем та АЦП. Вихід ЕОМ 5 з'єднаний з і, j, та спрямовує її до масиву значень амплітуд. керуючим входом привода 6 лінійки 2 приймачів 3 Під час повернення лінійки 2 приймачів 3 РВ РВ, а вхід - з виходом АЦП, який підключено вхотакож здійснюється m-опитувань в межах ширини дом через підсилювач до виходу комутатора 4. m 1 Вихід привода 6 механічно зв'язаний з лінійкою 2 a переміщення i-го приймача 3 РВ з діленприймачів 3 РВ. Механічна система 7 переміщенm ня забезпечує робоче переміщення об'єкта 8 контням її при m-опитуваннях на (m-1) рівних частин. ролю, яке є перпендикулярним лінійці 2 приймачів ЕОМ 5 аналізує m-амплітуд сигналів з i-го прийма3 РВ, попадання його в зону контролю та вихід з ча 3 РВ, виділяє з них min, присвоює їй номер неї. i,(j+1) та спрямовує до масиву значень амплітуд Цифровий радіограф працює наступним чиN M. ном. Водночас проводиться аналіз кожного значенВ початковому стані джерело 1 з коліматором ня амплітуд Aij на min із Aj та max із Аі. Таким чиРВ випромінює коліміроване РВ на лінійку 2 прийном, формується двомірний масив чисел, значенмачів 3 РВ. ня яких пропорційні амплітудам РВ. Приймачі 3 РВ перетворюють РВ в електричні Зворотно-поступальний рух лінійки 2 приймасигнали, амплітуда яких пропорціональна амплітучів 3 РВ дaє можливість підстроювати приймачі 3 ді РВ, яке проходить через площадки вхідного вікРВ під межу зміни поглинаючої здатності об'єкта, на приймачів 3 РВ лінійки 2 з площею а b. що дає можливість контролювати невеликі зміни Одержані електричні сигнали через комутатор густини об'єкта, реєструвати предмети з малень4 з підсилювачем та АЦП надходять у цифровому кими геометричними розмірами. Також компенсувигляді в пам'ять ЕОМ 5. Комутатор 4 циклічно ється відсутність інформації від об'єкта 8 через опитує приймачі 3 РВ лінійки 2 з частотою опитунеминучу відстань між кристалами приймачів вання Fоп., причому кількість опитувань в циклі, 3 РВ. принаймні, у 2 рази більше кількості приймачів 3 Використання винаходу дозволить істотно підРВ в лінійці 2. вищити достовірність контролю об'єктів, яка обмеЗгідно команди «Пуск» ЕОМ 5 вмикає механічжувалась шириною лінійки приймачів РВ. ну систему 7 переміщення об'єкта 8 контролю та привод 6 лінійки 2 приймачів 3 РВ. Механічна сис 5 Комп’ютерна верстка О. Гапоненко 76811 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital radiograph
Автори англійськоюSvysch Volodymyr Mytrofanovych, Petrenko Vasyl Ivanovych
Назва патенту російськоюЦифровой радиограф
Автори російськоюСвищ Владимир Митрофанович, Петренко Василий Иванович
МПК / Мітки
МПК: H05G 1/00, G01N 23/00
Код посилання
<a href="https://ua.patents.su/3-76811-cifrovijj-radiograf.html" target="_blank" rel="follow" title="База патентів України">Цифровий радіограф</a>
Пристрій для контролю положення гостряка стрілочного переводу
Номер патенту: 67532
Опубліковано: 15.06.2004
Автори: Кізяков Валер'ян Якович, Парфьонов Володимир Іванович
МПК: B61L 5/00
Мітки: пристрій, стрілочного, переводу, контролю, гостряка, положення
Формула / Реферат:
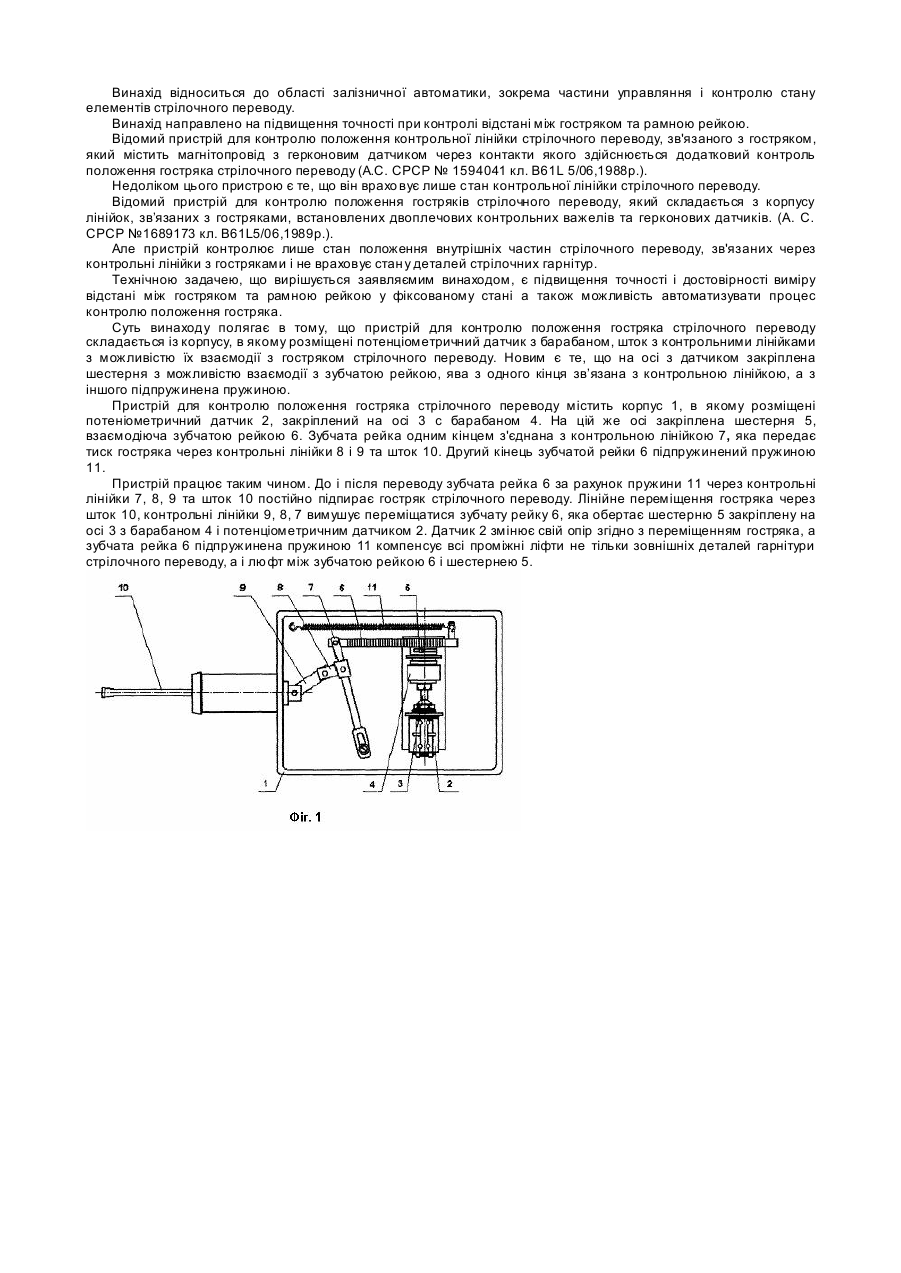
Пристрій для контролю положення гостряка стрілочного переводу, що складається з корпусу, в якому розміщені потенціометричний датчик з барабаном, шток з контрольними лінійками, з можливістю їх взаємодії з гостряком стрілочного переводу, який відрізняється тим, що додатково на осі з датчиком закріплена шестірня з можливістю взаємодії з зубчатою рейкою, яка з одного кінця з'єднана з контрольною лінійкою, а з іншого підпружинена.
Пристрій бобонича п.п. для підрахунку товщини діелектричного матеріалу
Номер патенту: 71809
Опубліковано: 15.12.2004
Автор: Бобонич Петро Петрович
МПК: G01N 21/35, G01N 21/17, G01N 21/27
Мітки: матеріалу, товщини, п.п, підрахунку, діелектричного, пристрій, бобонича
Формула / Реферат:
1. Пристрій для підрахунку товщини діелектричного матеріалу, що містить джерело випромінювання та приймач для підрахунку товщини тканини або паперу, який відрізняється тим, що приймач виконаний із фотоприймача структури р-n-р-n-типу з інверсією знаку електрорушійної сили.2. Пристрій за п. 1, який відрізняється тим що як приймач застосовують лінійку фотоприймачів структури р-n-р-n-типу з інверсією знаку електрорушійної сили.3....
Цифровий пристрій контролю перегорання двониткової лампи світлофора
Номер патенту: 41010
Опубліковано: 15.08.2001
Автори: Товчигречко Юрій Григорович, Гаврилюк Володимир Ілліч
МПК: H05B 39/00
Мітки: контролю, пристрій, перегорання, лампи, цифровий, світлофора, двониткової
Формула / Реферат:
Цифровий пристрій контролю перегорання двониткової лампи світлофора, що містить джерело змінного струму, двониткову лампу, блок включення резервної нитки лампи, вузол світлової індикації, який відрізняється тим, що до джерела змінного струму послідовно з узгоджуючим трансформатором, до якого підключено блок вмикання резервної нитки лампи, підключено пасивний елемент, який з'єднано з вузлом гальванічного розділення, вихід якого з'єднано з...
Цифровий спосіб виміру частоти по n дискретних відліках пачки когерентних сигналів
Номер патенту: 51214
Опубліковано: 15.11.2002
Автори: Ленчук Дмитро Валерійович, Кравченко Микола Іванович
МПК: G01R 23/16
Мітки: дискретних, цифровий, виміру, частоти, когерентних, сигналів, пачки, відліках, спосіб
Формула / Реферат:
Цифровий спосіб виміру частоти по N дискретних відліках пачки когерентних сигналів, що полягає у вимірі амплітуд сигналів за допомогою дискретного перетворення Фур’є ( ДПФ) у кількох частотних каналах і виборі основного частотного каналу, у якому амплітуда сигналу максимальна і частоту якого приймають як...
Цифровий пристрій контролю стану світлодіодної матриці світлофора
Номер патенту: 50413
Опубліковано: 15.10.2002
Автори: Товчигречко Юрій Григорович, Гаврилюк Володимир Ілліч
МПК: H05B 39/00
Мітки: світлофора, матриці, пристрій, світлодіодної, стану, цифровий, контролю
Формула / Реферат:
Цифровий пристрій контролю стану світлодіодної матриці світлофора, що містить корпус, блок діодів, захисне скло, який відрізняється тим, що до джерела живлення світлодіодної матриці ввімкнутий випрямляч напруги, до якого паралельно ввімкнутий блок підсилення кодуючого сигналу та послідовно роздільний діод, до катода якого ввімкнуті стабілізатори струму світлодіодної матриці, до точок з'єднання послідовно ввімкнутих випромінюючих світлодіодів...
Попередній патент: Фармацевтична композиція антагоніста рецептора тахікініну у формі наночастинок
Наступний патент: Спосіб комплексного лікування алергії на пил та пір’я подушок
Випадковий патент: Пристрій для збродження органічних відходів