Спосіб контролю параметрів провідників жорсткого армування двостороннього розташування та пристрій для його здійснення
Номер патенту: 77481
Опубліковано: 15.12.2006
Автори: Грядущий Борис Абрамович, Евсюков Сергій Олександрович, Чехлатий Микола Олександрович, Мялковський Валентин Йосипович, Карпунова Олена Вікторівна, Коваль Анатолій Миколайович
Формула / Реферат
1. Спосіб контролю параметрів провідників жорсткого армування двостороннього розташування, відповідно до якого вимірюють відстані між першим провідником і транспортною посудиною ![]() , а також між другим провідником і транспортною посудиною
, а також між другим провідником і транспортною посудиною ![]() у лобовому напрямку в горизонтальній площині, переміщують транспортну посудину і вимірюють поточне значення пройденого шляху, який відрізняється тим, що на початку переміщення посудини здійснюють додатковий вимір відстані між першим провідником і транспортною посудиною
у лобовому напрямку в горизонтальній площині, переміщують транспортну посудину і вимірюють поточне значення пройденого шляху, який відрізняється тим, що на початку переміщення посудини здійснюють додатковий вимір відстані між першим провідником і транспортною посудиною ![]() , а також між другим провідником і транспортною посудиною
, а також між другим провідником і транспортною посудиною ![]() у лобовому напрямку в горизонтальній площині на відстані L від попереднього виміру, переміщують транспортну посудину на відстань L і здійснюють повторні вимірювання, порівнюють результати вимірювання в горизонтальній площині на відстані L від початку переміщення, коректують виміряні показники, фіксують відхилення ширини колії та зміщення першого (
у лобовому напрямку в горизонтальній площині на відстані L від попереднього виміру, переміщують транспортну посудину на відстань L і здійснюють повторні вимірювання, порівнюють результати вимірювання в горизонтальній площині на відстані L від початку переміщення, коректують виміряні показники, фіксують відхилення ширини колії та зміщення першого (![]() -
- ![]() ) і другого провідників (
) і другого провідників (![]() -
- ![]() ) у лобовому напрямку у вертикальній площині на вибраній ділянці вимірювання.
) у лобовому напрямку у вертикальній площині на вибраній ділянці вимірювання.
2. Пристрій контролю параметрів провідників жорсткого армування двостороннього розташування, що містить перший і другий датчики вимірювання відстані, які розташовані в горизонтальній площині, і датчик переміщення посудини, з'єднані з пристроєм обробки інформації і закріплені на транспортній посудині, розташованій між провідниками жорсткого армування, який відрізняється тим, що додатково введений третій і четвертий датчики вимірювання відстані, які з'єднані з пристроєм обробки інформації і встановлені в горизонтальній площині на відстані L від першого і другого датчиків вимірювання відстані, причому третій датчик вимірювання відстані встановлений у вертикальній площині з першим датчиком вимірювання відстані, а четвертий - у вертикальній площині з другим датчиком вимірювання відстані.
Текст
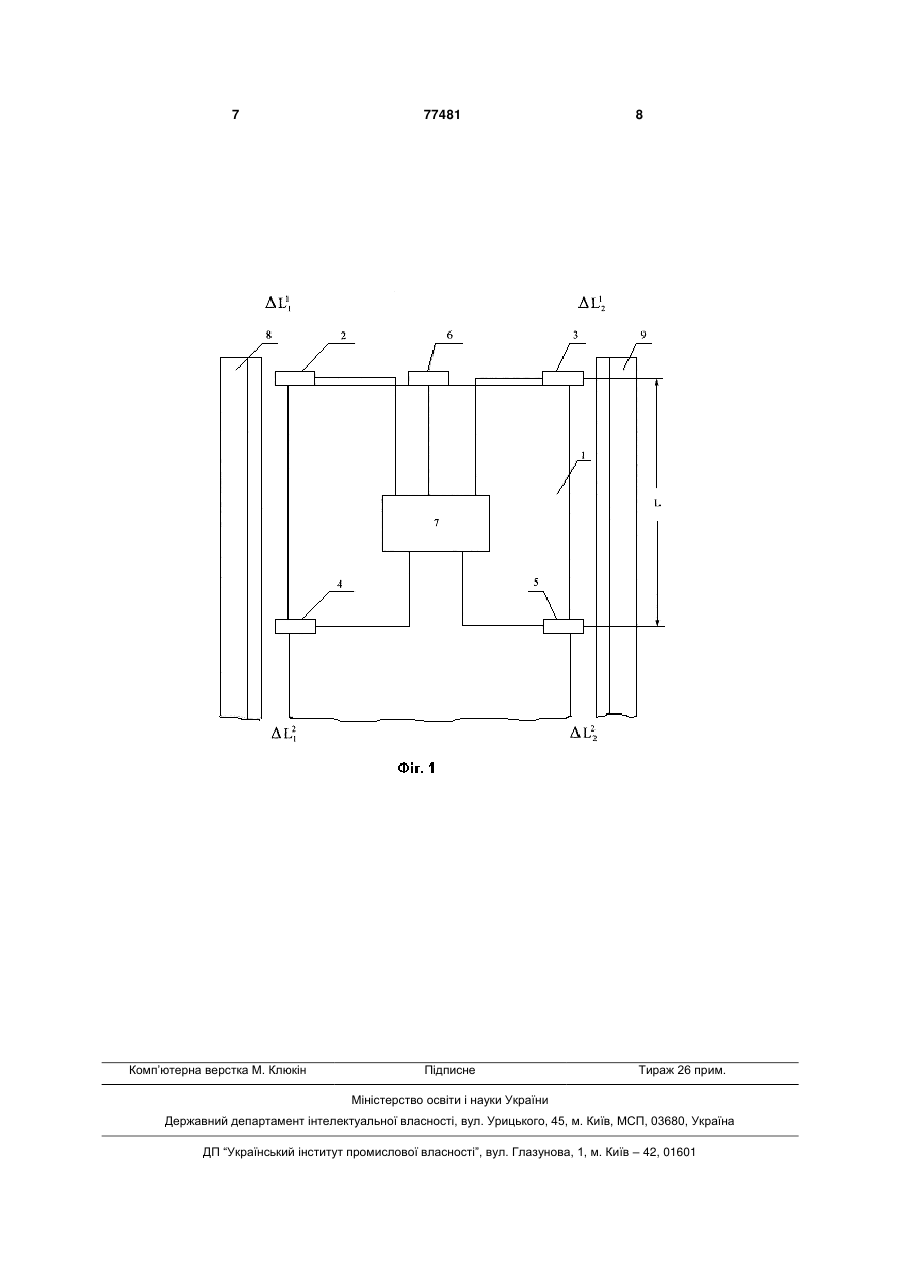
1. Спосіб контролю параметрів провідників жорсткого армування двостороннього розташування, відповідно до якого вимірюють відстані між першим провідником і транспортною посудиною 2 77481 1 3 77481 4 жорсткого армування двостороннього розташуглибині, а також підвищується точність виміру вання, відповідно до якого вимірюють відстань між параметрів армування та оперативність контролю першим провідником і транспортною посудиною параметрів армування. ДЦ, а також між другим провідником і транспортПерша поставлена задача вирішується тим, 1 що в способі контролю параметрів провідників ною посудиною L1 у лобовому напрямку в жорсткого армування двостороннього розташугоризонтальній площині, переміщають транспортвання, вимірюють відстань між першим ну посудину та вимірюють поточне значення пройпровідником і транспортною посудиною L1 , а 1 деного шляху. До недоліку пристрою варто віднести також між другим провідником і транспортною поскладність реалізації та неможливість виміру кутосудиною у лобовому напрямку в L1 , 2 вого відхилення провідників жорсткого армування. горизонтальній площині, переміщають транспортВідомий автоматизований рейковий дефектону посудину та вимірюють поточне значення пройскоп АОД - 02 [3], що містить багатоканальний деного шляху. Відповідно до винаходу, на початку ультразвуковий локатор, керований комп'ютером, і руху роблять додатковий вимір відстані між пердатчик шляху. Пристрій дозволяє здійснити запис шим провідником і транспортною посудиною L2 , ехографічної інформації з прив'язкою до шляхових 1 координат. До недоліку пристрою варто віднести а також між другим провідником і транспортною те, що він не забезпечує контроль ширини колії. посудиною у лобовому напрямку в L2 2 Найбільш близьким до технічного рішення, що горизонтальній площині на відстані L від попередзаявляється, є пристрій контролю ширини колії нього виміру, переміщають транспортну посудину провідників жорсткого армування [4], який містить на відстань L і роблять повторні виміри, перший і другий датчики виміру відстані, що порівнюють результати виміру в горизонтальній розташовані в горизонтальній площині, датчик площині на відстані L від початку руху, коректують шляху, які з'єднані з пристроєм обробки інформації обмірювані показання, фіксують відхилення ширий закріплені на транспортній посудині. До недоліку пристрою варто віднести ни колії та зміщення першого ( L1 L2 ) і другого 1 1 неможливість визначення відносного зміщення 1 2 провідника ( L2 L2 ) у лобовому напрямку у відхилення від вертикалі робочих поверхонь провідників. Відносні зміщення робочих поверхонь вертикальній площині на обраній ділянці виміру. провідників характеризують ступінь їхнього викДодатковий вимір між першим провідником і ривлення по глибині ствола й визначають рівень транспортною посудиною L2 , а також між другим 1 горизонтальних навантажень на армування, що виникають унаслідок відхилення піднімальної поL2 , провідником і транспортною посудиною 2 судини від строго вертикального напрямку. Особзабезпечує оперативний контроль ширини колії і ливо небезпечними є знакозмінні відхилення, що L2 ) зміщення першого ( L1 і другого сприяють зростанню динамічних навантажень. 1 1 В основу першого з групи винаходів покладена 1 2 L2 ) провідника в лобовому напрямку у ( L2 задача удосконалення способу контролю вертикальній площині на обраній ділянці. При параметрів провідників жорсткого армування двоцьому порівняння повторних вимірів при стороннього розташування шляхом виконання переміщенні посудини на відстані L дозволить додаткового виміру відстані між першим виконати коректування показань, що підвищує провідником і транспортною посудиною L2 , а 1 точність виміру також між другим провідником і транспортною поДруга поставлена задача вирішується тим, що пристрій контролю провідників жорсткості армуL2 судиною у лобовому напрямку в 2 вання двостороннього розташування містить пергоризонтальній площині на відстані L від попередший і другий датчики виміру відстані, які нього виміру, переміщення транспортної посудини розташовані в горизонтальній площині, і датчик на відстань L і повторних вимірів, що забезпечить шляху, що з'єднані з пристроєм обробки оперативний контроль ширини колії та контроль інформації та закріплені на транспортній посудині, зміщення провідників у вертикальній площині на розташованій між провідниками жорсткого армуобраній ділянці, порівняння результатів вимірів у вання. Відповідно до винаходу, додатково введені горизонтальній площині, дозволяє виконати третій і четвертий датчики виміру відстані, які коректування' обмірюваних показань і тим самим з'єднані з пристроєм обробки інформації й підвищити точність виміру параметрів армування й встановлені на відстані L від першого й другого оперативність контролю стану армування. датчиків виміру відстані в горизонтальній площині, В основу другого з групи винаходів поставлена причому третій датчик виміру відстані встановлезадача удосконалення пристрою контролю ний у вертикальній площині з першим датчиком параметрів провідників жорсткого армування двовиміру відстані, а четвертий - у вертикальній стороннього розташування шляхом уведення площині з другим датчиком виміру відстані. третього та четвертого датчиків виміру відстані, Таке розміщення датчиків виміру відстані встановлених у горизонтальній площині на дозволяє контролювати відхилення ширини колії відстані L від першого і другого датчиків виміру провідників від проектного значення та величини відстані, що вигідно відрізняє пристрій, що місцевих викривлень. заявляється, від прототипу, оскільки скорочується Суть винаходу зображена на Фіг.1. час технічного огляду армування ствола по всій Спосіб, що заявляється, реалізується так. 5 77481 До початку руху вимірюють відстань між пербовому L1 , 1 шим провідником і транспортною посудиною а також між другим провідником і транспортною L1 2 посудиною , у лобовому напрямку в горизонтальній площині; визначають величину відхилення ширини колії та запам'ятовують її. Роблять додатковий вимір відстані між першим провідником і транспортною посудиною L2 , а 1 також між другим провідником і транспортною посудиною у лобовому напрямку в L2 2 горизонтальній площині на відстані L від початку руху; визначають величину відхилення ширини колії та запам'ятовують її. Найбільше доцільно використовувати для цього пристрій, описаний нижче. Переміщають транспортну посудину на відстань L і роблять повторні виміри. Порівнюють результати вимірів у горизонтальній площині у вихідному положенні й на відстані L від початку руху. Коректують відповідні обмірювані відстані між першим провідником і транспортною посудиною, а також між другим провідником і транспортною посудиною. Визначають відхилення ширини колії та зміщення першого ( L1 1 L2 ) і другого 1 ( L1 L2 ) провідника в лобовому напрямку у 2 2 вертикальній площині на обраній ділянці виміру. Переміщають транспортну посудину на наступну величину L і здійснюють аналогічні дії, як описано вище. Як показано на фіг.1, пристрій контролю провідників жорсткого армування двостороннього розташування складається з піднімальної посудини 1 (скіпа або кліті), датчиків 2-5 виміру відстані, датчика 6 шляху, блоку 7 обробки інформації, провідників 8, 9 жорсткого армування. Для контролю провідників жорсткого армування двостороннього розташування на корпусі піднімальної посудини 1 установлюють датчик 6 шляху (наприклад, ультразвуковий, індуктивний і т.д.) і безконтактні датчики 2, 3 виміру відстані до провідників 8 і 9 у лобовому напрямку в горизонтальній площині. На відстані L (наприклад, рівним кроку армування) стосовно датчиків 2 і 3 виміру відстані, установлюють датчики 4 і 5 виміри відстані, причому датчик 4 виміру відстані встановлений у вертикальній площині з датчиком 2 виміру відстані, а датчик 5 виміру відстані - у вертикальній площині з датчиком 3 виміру відстані. Здійснюють калібрування датчиків 2 і 4 виміру відстані шляхом визначення віддалі до точки, що лежить на провіднику 8 і калібрування датчиків 3 і 5 виміру відстані - до точки, що лежить на провіднику 9. При русі посудини, наприклад, униз, датчик 6 шляху контролює проходження місця з'єднання разпірних балок, що утворять ярус армування і формує команду на визначення віддалі провідника 8 від датчика 2 виміру відстані ( L1 ), а 1 також віддалі провідника 9 від датчика 3 виміру відстані ( L1 ). Сигнал з виходу датчика 6 шляху і 2 датчиків 2, 3 виміру відстані до провідників 8, 9 надходить у блок 7 обробки інформації, що визначає сумарне відхилення ширини колії в ло ( L1 1 напрямку L2 ). 1 в 6 горизонтальній площині Одночасно датчики 4 і 5 виміри відстані визначають відповідно відстань ( L2 ) до 1 провідника 8 і відстань ( L2 ) до провідника 9 у 2 лобовому напрямку в горизонтальній площині на рівні наступного кроку армування. Блок 7 обробки інформації визначає величину зміщення провідника 8 ( L1 1 L2 ) і зміщення провідника 9 1 ( L1 L2 ) у лобовому напрямку у вертикальній 2 2 площині на кроці армировки. За отриманими результатами оцінюють зміщення поверхні провідників у горизонтальній і вертикальній площинах. При переміщенні піднімальної посудини 1 униз на наступний крок армування пристрій виконує аналогічні виміри по визначенню ширини колії та відносного відхилення провідників 8, 9 жорсткого армування. При цьому блок 7 обробки інформації порівнює показання датчиків 2 і 3 виміру відстані з показаннями датчиків 4 і 5 виміру відстані в даному місці контролю в попередньому циклі вимірювання. Діагностика роботи пристрою виконується так: - якщо показання пар датчиків у контрольованих площинах знаходяться в межах похибки виміру, то процес контролю провідників 8, 9 продовжується; - при значних відхиленнях показань будь-якої пари датчиків 2,4 і 3,5 оцінка технічного стану провідників жорсткого армування припиняється й блок 7 обробки інформації формує команду про відмовлення відповідного датчика. Таке рішення дозволяє в процесі контролю параметрів армування здійснювати діагностику пристрою. Процес контролю провідників шахтного армування закінчується після виміру горизонтальних і вертикальних відхилень по всій глибині ствола. На підставі аналізу результатів перевірки технічного стану провідників можна оперативно оцінити відхилення ширини колії від проектного значення і ступінь скривлення провідників, що дозволить розробити заходи щодо ліквідації порушень і забезпеченню стійкої роботи підйому. В даний час в інституті розроблений і виготовлений експериментальний зразок пристрою контролю провідників жорсткого армування двостороннього розташування. За результатами випробувань прийняте рішення про виготовлення дослідної партії пристроїв, що заявляються. Джерела інформації: 1. Патент России №93040961 Способ измерения ширины колеи железнодорожного пути при движении путеизмерителя и устройство для его осуществления, МКИ6 Е01В35/12, Опубл.20.08.96г. 2. Патент России №2074829 Устройство для контроля состояния рельсового пути, МКИ6 Е01В35/00, Опубл.20.08.96г. 3. Автоматизированная дефектоскопия рельсов /Бабиков Д. и др. // Современные технологии автоматизации.- М.: СТА-ПРЕСС, -2000.- №1.С.56 4. А.с. СССР № 1525459 Устройство для контроля ширины колеи проводников жесткой армировки, МКИ4 G01C7/04, Опубл.20.08.96г. Бюл.№44. 7 Комп’ютерна верстка М. Клюкін 77481 8 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for checking the parameters of the rigid guide elements of a shaft at their double-sided arrangement and a device for the realization of the method
Автори англійськоюHriaduschyi Borys Abramovych, Mialkovskyi Valentyn Yosypovych, Koval Anatolii Mykolaiovych, Chekhlatyi Mykola Oleksandrovych
Назва патенту російськоюСпособ контроля параметров жестких направляющих элементов шахтного ствола при их двустороннем расположении и устройство для осуществления способа
Автори російськоюГрядущий Борис Абрамович, Мялковский Валентин Иосифович, Коваль Анатолий Николаевич, Чехлатый Николай Александрович
МПК / Мітки
МПК: G01C 7/00
Мітки: провідників, армування, спосіб, контролю, двостороннього, розташування, пристрій, здійснення, жорсткого, параметрів
Код посилання
<a href="https://ua.patents.su/4-77481-sposib-kontrolyu-parametriv-providnikiv-zhorstkogo-armuvannya-dvostoronnogo-roztashuvannya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб контролю параметрів провідників жорсткого армування двостороннього розташування та пристрій для його здійснення</a>
Спосіб контролю провідників жорсткого армування шахтних стволів та пристрій для його реалізації
Номер патенту: 42406
Опубліковано: 15.10.2001
Автори: Ільїн Сергій Ростиславович, Лопатин Валерій Володимирович, Коцеруба Валерій Григорович, Радченко Володимир Костянтинович, Гавруцький Олександр Юхимович, Попов Станіслав Олегович, Послід Борис Сергійович, Шидо Микола Миколайович, Дідок Анатолій Володимирович
МПК: B66B 19/00
Мітки: пристрій, провідників, жорсткого, спосіб, стволів, шахтних, армування, реалізації, контролю
Формула / Реферат:
1. Спосіб контролю провідників жорсткого армування шахтних стволів, що вміщує вимір лобової та бокової поверхонь провідника по всій глибині ствола трьома роликами, який відрізняється тим, що відхилення роликів перетворюють в електричний сигнал, реєструють місце розташування посудини в стволі, нормують та узгоджують електричні сигнали, трансформують на цифрові коди і вводять до ПЕОМ, де порівнюють результати з допустими значеннями і за...
Пристрій для контролю зношування рейкових провідників армування шахтного стовбура
Номер патенту: 17359
Опубліковано: 15.09.2006
Автори: Коржук Олексій Володимирович, Куриленко Валерій Костянтинович, Алексеев Володимир Юрієвич
МПК: G01C 7/00
Мітки: пристрій, провідників, рейкових, армування, шахтного, зношування, стовбура, контролю
Формула / Реферат:
Пристрій для контролю зношування рейкових провідників армування шахтного стовбура, що містить скобу, яка охоплює головку провідника із зазорами відносно її робочих поверхонь, що базується на підошві рейки й обладнана вимірником зношування, який відрізняється тим, що скоба виконана із двох шарнірно з’єднаних між собою й симетрично розташованих відносно рейки частин, що охоплюють її головку й стійку з усіх боків з однаковими зазорами,...
Компенсатор осьового зміщення коробчатих провідників жорсткого армування стволів шахт
Номер патенту: 25202
Опубліковано: 30.10.1998
Автор: Мусієнко Володимир Дмитрович
МПК: E21D 7/00
Мітки: стволів, провідників, армування, шахт, зміщення, жорсткого, компенсатор, коробчатих, осьового
Формула / Реферат:
Компенсатор осевого смещения коробчатых проводников жесткой армировки стволов шахт, включающий коробчатый проводник из двух частей, квадратный стержень, помещенный в этих частях проводника, втулки, размещенные на концах стержня и закрепленные в проводниках, одна из которых вместе со стержнем жестко закреплена в одной из частей проводника, хомуты и тарельчатые пружины, установленные на стержне между концами проводников с зазором друг к другу,...
Пристрій для контролю за відхиленнями параметрів тари та спосіб його здійснення
Номер патенту: 66770
Опубліковано: 15.06.2004
Автори: Нікс Тімоті Дж., Рінглін Джеймс А.
МПК: G01N 21/90
Мітки: контролю, відхиленнями, пристрій, спосіб, тари, здійснення, параметрів
Формула / Реферат:
1. Пристрій для контролю за відхиленнями параметрів тари (14), які впливають на промислове застосування тари, який містить:пристрій (39) для обертання тари відносно її осі,джерело (16) світла, яке містить дифузор (20) і поляризатор (22) для напрямлення розсіяного і поляризованого світлового пучка через тару, розташовану в згаданому пристрої для обертання тари,першу камеру (24), розміщену відносно пристрою для обертання...
Демпферний пристрій рейкових провідників
Номер патенту: 38280
Опубліковано: 15.05.2001
Автори: Рубель Володимир Олександрович, Рубель Олександр Васильович, Рубель Андрій Олександрович, Блохін Сергій Євгенійович
МПК: E21D 7/00
Мітки: провідників, пристрій, демпферний, рейкових
Формула / Реферат:
Дата прийняттярішення19.12.2000р.(21) 2000063512(54) (57)Демпферний пристрій рейкових провідників, що містить корпус, раму, спрямовуючий роликі відрізняється тим, що вісь ролика жорстко закріплена на рамі, розміщеної в пазах, виконаних у корпусі з можливістю рухливості її в горизонтальній площині в моменти контакту направляючого ролика з рейковим провідником.
Попередній патент: Спосіб (варіанти) виготовлення багатошарового матеріалу, багатошарове скло, отримане цим способом, а також пристрій (варіанти) для здійснення цього способу
Наступний патент: Інверсійний вольтамперометричний спосіб визначення талію у водному середовищі
Випадковий патент: Канатний блок