Перетворювач обертальних рухів у зворотно-поступальні рухи – перетворювач дєгтярьова
Формула / Реферат
Перетворювач обертальних рухів у зворотно-поступальні рухи без виникнення знакоперемінних навантажень, який має форму паралелограма, сторони якого з'єднані рухомими вузлами, дві його паралельні сторони виконані стержнями, а дві інші сторони виконані важелями, осі обертання яких знаходяться в точці перетинання цих сторін з лінією, яка проходить між стержнями і паралельна до них, який відрізняється тим, що в один із стержнів вмонтований звичайний перетворювач обертальних рухів у зворотно-поступальні рухи, а також стабілізатори попереднього навантаження.
Текст
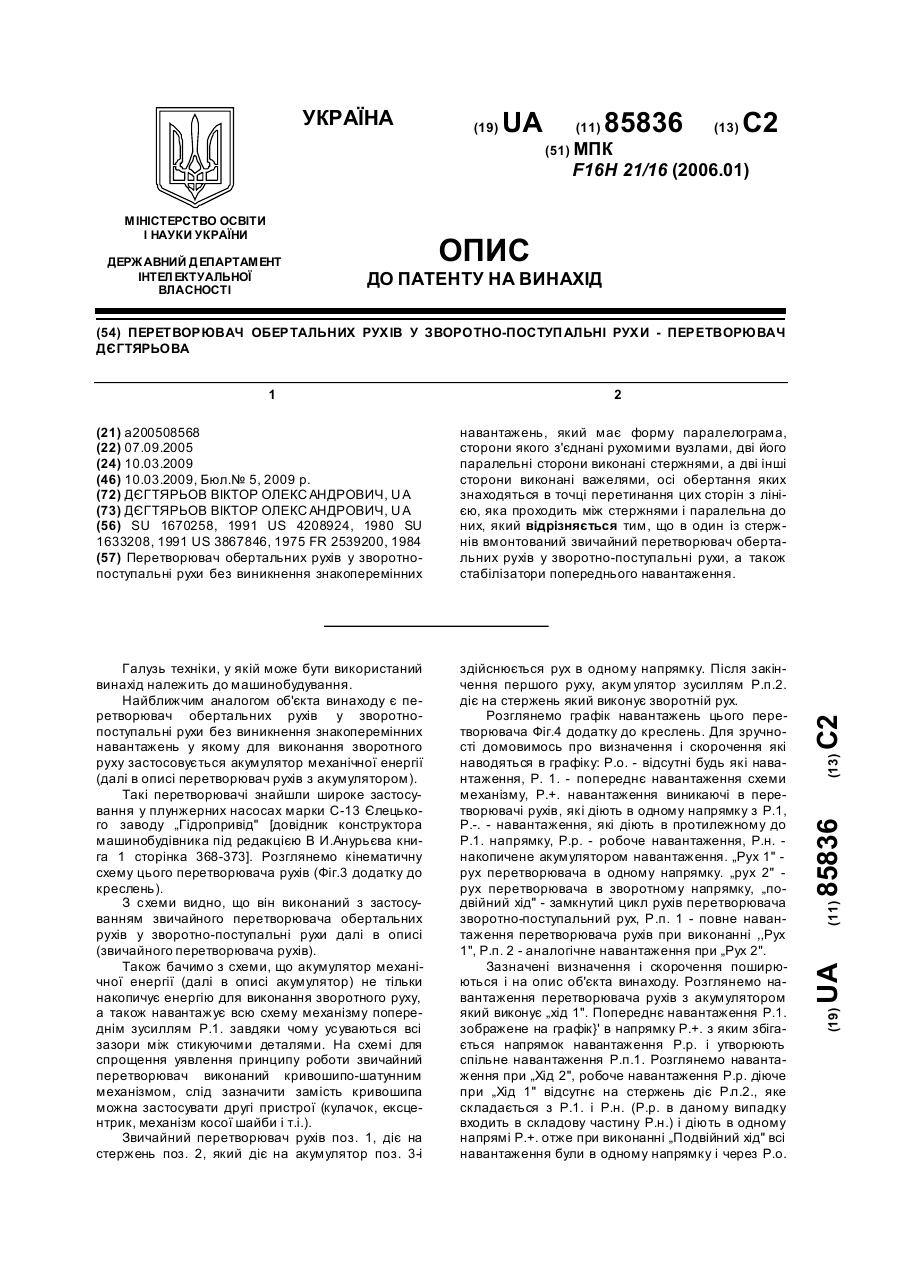
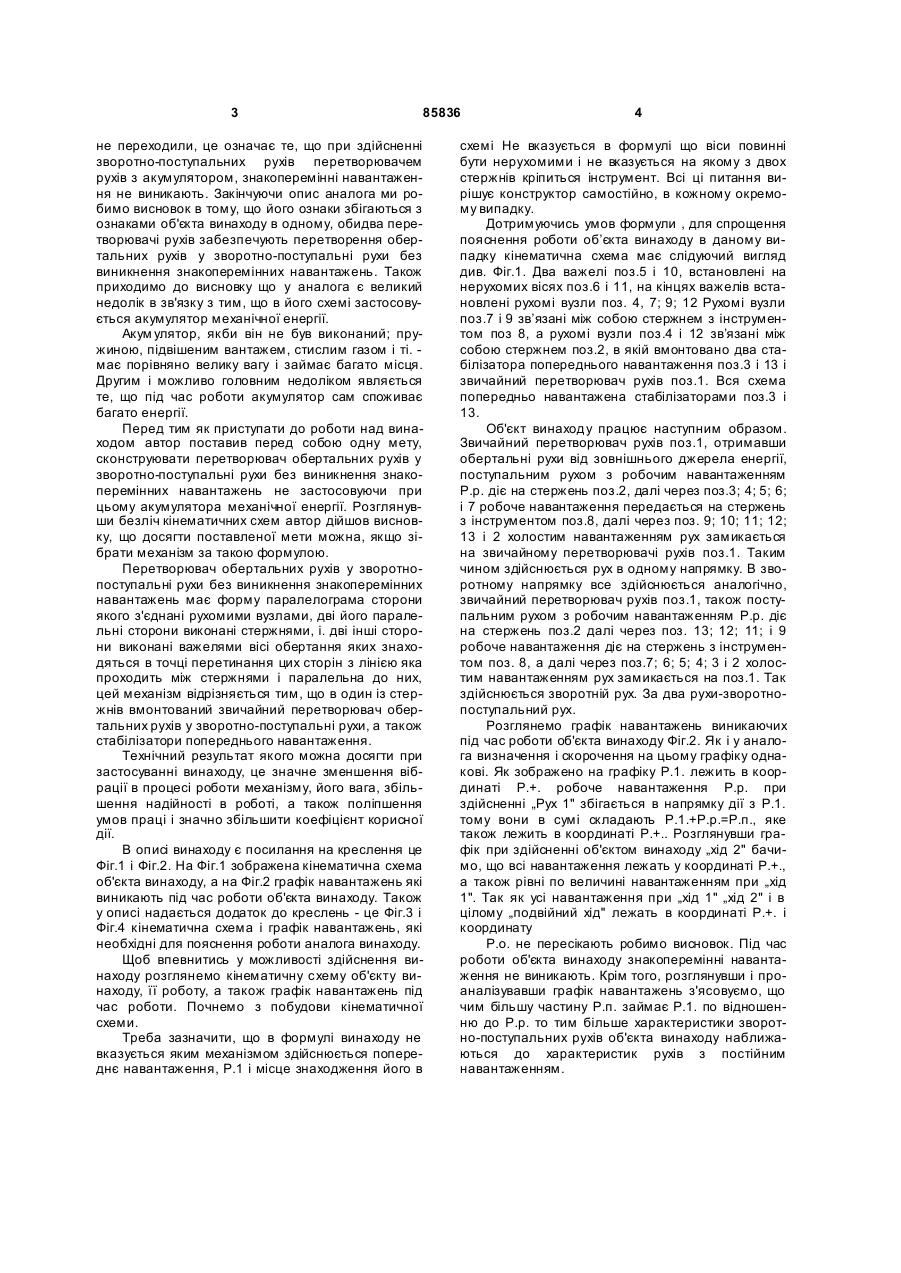
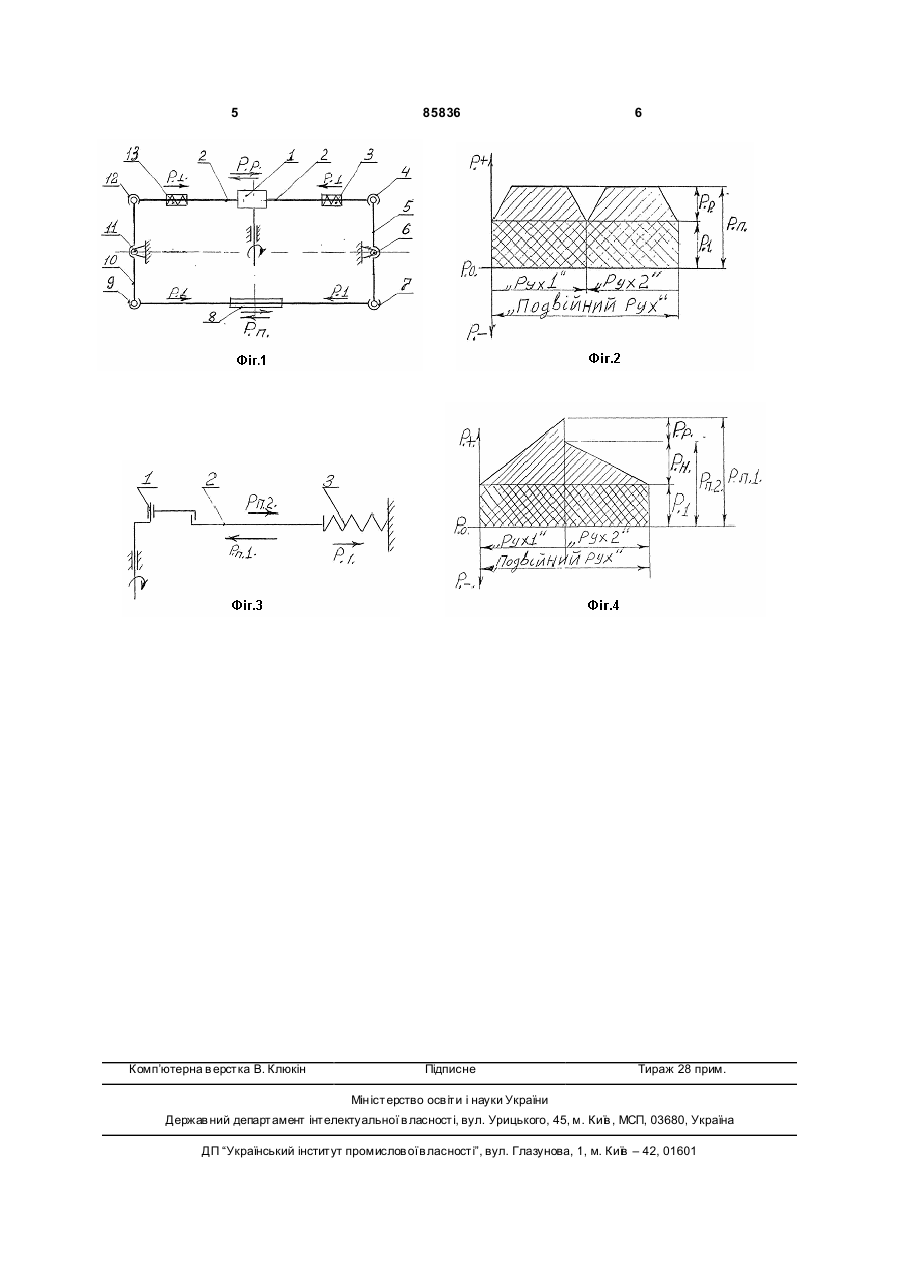
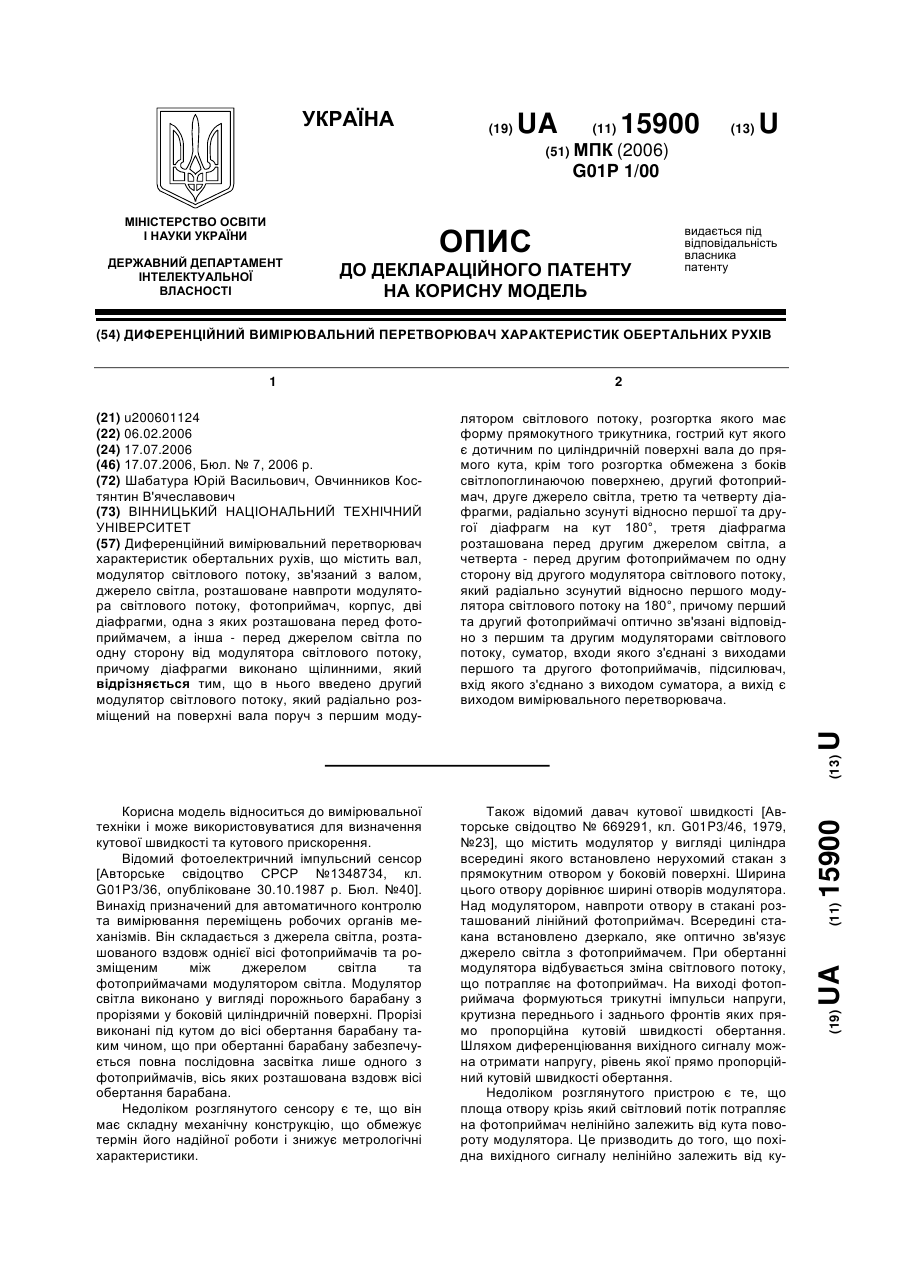
Перетворювач обертальних рухів у зворотнопоступальні рухи без виникнення знакоперемінних 3 85836 не переходили, це означає те, що при здійсненні зворотно-поступальних рухів перетворювачем рухів з акумулятором, знакоперемінні навантаження не виникають. Закінчуючи опис аналога ми робимо висновок в тому, що його ознаки збігаються з ознаками об'єкта винаходу в одному, обидва перетворювачі рухів забезпечують перетворення обертальних рухів у зворотно-поступальні рухи без виникнення знакоперемінних навантажень. Також приходимо до висновку що у аналога є великий недолік в зв'язку з тим, що в його схемі застосовується акумулятор механічної енергії. Акум улятор, якби він не був виконаний; пружиною, підвішеним вантажем, стислим газом і ті. має порівняно велику вагу і займає багато місця. Другим і можливо головним недоліком являється те, що під час роботи акумулятор сам споживає багато енергії. Перед тим як приступати до роботи над винаходом автор поставив перед собою одну мету, сконструювати перетворювач обертальних рухів у зворотно-поступальні рухи без виникнення знакоперемінних навантажень не застосовуючи при цьому акумулятора механічної енергії. Розглянувши безліч кінематичних схем автор дійшов висновку, що досягти поставленої мети можна, якщо зібрати механізм за такою формулою. Перетворювач обертальних рухів у зворотнопоступальні рухи без виникнення знакоперемінних навантажень має форму паралелограма сторони якого з'єднані рухомими вузлами, дві його паралельні сторони виконані стержнями, і. дві інші сторони виконані важелями вісі обертання яких знаходяться в точці перетинання цих сторін з лінією яка проходить між стержнями і паралельна до них, цей механізм відрізняється тим, що в один із стержнів вмонтований звичайний перетворювач обертальних рухів у зворотно-поступальні рухи, а також стабілізатори попереднього навантаження. Технічний результат якого можна досягти при застосуванні винаходу, це значне зменшення вібрації в процесі роботи механізму, його вага, збільшення надійності в роботі, а також поліпшення умов праці і значно збільшити коефіцієнт корисної дії. В описі винаходу є посилання на креслення це Фіг.1 і Фіг.2. На Фіг.1 зображена кінематична схема об'єкта винаходу, а на Фіг.2 графік навантажень які виникають під час роботи об'єкта винаходу. Також у описі надається додаток до креслень - це Фіг.3 і Фіг.4 кінематична схема і графік навантажень, які необхідні для пояснення роботи аналога винаходу. Щоб впевнитись у можливості здійснення винаходу розглянемо кінематичну схему об'єкту винаходу, її роботу, а також графік навантажень під час роботи. Почнемо з побудови кінематичної схеми. Треба зазначити, що в формулі винаходу не вказується яким механізмом здійснюється попереднє навантаження, Р.1 і місце знаходження його в 4 схемі Не вказується в формулі що віси повинні бути нерухомими і не вказується на якому з двох стержнів кріпиться інструмент. Всі ці питання вирішує конструктор самостійно, в кожному окремому випадку. Дотримуючись умов формули , для спрощення пояснення роботи об’єкта винаходу в даному випадку кінематична схема має слідуючий вигляд див. Фіг.1. Два важелі поз.5 і 10, встановлені на нерухомих вісях поз.6 і 11, на кінцях важелів встановлені рухомі вузли поз. 4, 7; 9; 12 Рухомі вузли поз.7 і 9 зв’язані між собою стержнем з інструментом поз 8, а рухомі вузли поз.4 і 12 зв’язані між собою стержнем поз.2, в якій вмонтовано два стабілізатора попереднього навантаження поз.3 і 13 і звичайний перетворювач рухів поз.1. Вся схема попередньо навантажена стабілізаторами поз.3 і 13. Об'єкт винаходу працює наступним образом. Звичайний перетворювач рухів поз.1, отримавши обертальні рухи від зовнішнього джерела енергії, поступальним рухом з робочим навантаженням P.p. діє на стержень поз.2, далі через поз.3; 4; 5; 6; і 7 робоче навантаження передається на стержень з інструментом поз.8, далі через поз. 9; 10; 11; 12; 13 і 2 холостим навантаженням рух замикається на звичайному перетворювачі рухів поз.1. Таким чином здійснюється рух в одному напрямку. В зворотному напрямку все здійснюється аналогічно, звичайний перетворювач рухів поз.1, також поступальним рухом з робочим навантаженням P.p. діє на стержень поз.2 далі через поз. 13; 12; 11; і 9 робоче навантаження діє на стержень з інструментом поз. 8, а далі через поз.7; 6; 5; 4; 3 і 2 холостим навантаженням рух замикається на поз.1. Так здійснюється зворотній рух. За два рухи-зворотнопоступальний рух. Розглянемо графік навантажень виникаючих під час роботи об'єкта винаходу Фіг.2. Як і у аналога визначення і скорочення на цьому графіку однакові. Як зображено на графіку Р.1. лежить в координаті Р.+. робоче навантаження P.p. при здійсненні „Рух 1" збігається в напрямку дії з Р.1. тому вони в сумі складають Р.1.+Р.р.=Р.п., яке також лежить в координаті Р.+.. Розглянувши графік при здійсненні об'єктом винаходу „хід 2" бачимо, що всі навантаження лежать у координаті Р.+., а також рівні по величині навантаженням при „хід 1". Так як усі навантаження при „хід 1" „хід 2" і в цілому „подвійний хід" лежать в координаті Р.+. і координату Р.о. не пересікають робимо висновок. Під час роботи об'єкта винаходу знакоперемінні навантаження не виникають. Крім того, розглянувши і проаналізувавши графік навантажень з'ясовуємо, що чим більшу частину Р.п. займає Р.1. по відношенню до P.p. то тим більше характеристики зворотно-поступальних рухів об'єкта винаходу наближаються до характеристик рухів з постійним навантаженням. 5 Комп’ютерна в ерстка В. Клюкін 85836 6 Підписне Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюConverter of rotary motion to reciprocal motion - degtiariov's converter
Автори англійськоюDehtiariov Viktor Oleksandrovych
Назва патенту російськоюПреобразователь вращательных движений в возвратно-поступательные движения - преобразователь дегтярева
Автори російськоюДегтярев Виктор Александрович
МПК / Мітки
МПК: F16H 21/16
Мітки: обертальних, рухів, перетворювач, дєгтярьова, зворотно-поступальні, рухи
Код посилання
<a href="https://ua.patents.su/3-85836-peretvoryuvach-obertalnikh-rukhiv-u-zvorotno-postupalni-rukhi-peretvoryuvach-dehgtyarova.html" target="_blank" rel="follow" title="База патентів України">Перетворювач обертальних рухів у зворотно-поступальні рухи – перетворювач дєгтярьова</a>
Вимірювальний перетворювач характеристик обертальних рухів з цифровим виходом

Номер патенту: 12039
Опубліковано: 16.01.2006
Автори: Овчинников Костянтин В'ячеславович, Шабатура Юрій Васильович
МПК: G01P 1/00
Мітки: характеристик, вимірювальний, рухів, виходом, обертальних, цифровим, перетворювач
Формула / Реферат:
Вимірювальний перетворювач характеристик обертальних рухів з цифровим виходом, що містить вал, модулятор світлового потоку, який зв'язаний з валом, джерело світла, розташоване навпроти модулятора, діафрагму з щільовим отвором, який відрізняється тим, що в нього введено фотолінійку, яка розташована паралельно осі обертання вала по одну сторону з джерелом світла від модулятора світлового потоку, який виконаний у вигляді світловідбивальної...
Диференційний вимірювальний перетворювач характеристик обертальних рухів
Номер патенту: 15900
Опубліковано: 17.07.2006
Автори: Овчинников Костянтин В'ячеславович, Шабатура Юрій Васильович
МПК: G01P 1/00
Мітки: обертальних, вимірювальний, характеристик, рухів, перетворювач, диференційний
Формула / Реферат:
Диференційний вимірювальний перетворювач характеристик обертальних рухів, що містить вал, модулятор світлового потоку, зв'язаний з валом, джерело світла, розташоване навпроти модулятора світлового потоку, фотоприймач, корпус, дві діафрагми, одна з яких розташована перед фотоприймачем, а інша - перед джерелом світла по одну сторону від модулятора світлового потоку, причому діафрагми виконано щілинними, який відрізняється тим, що в нього...
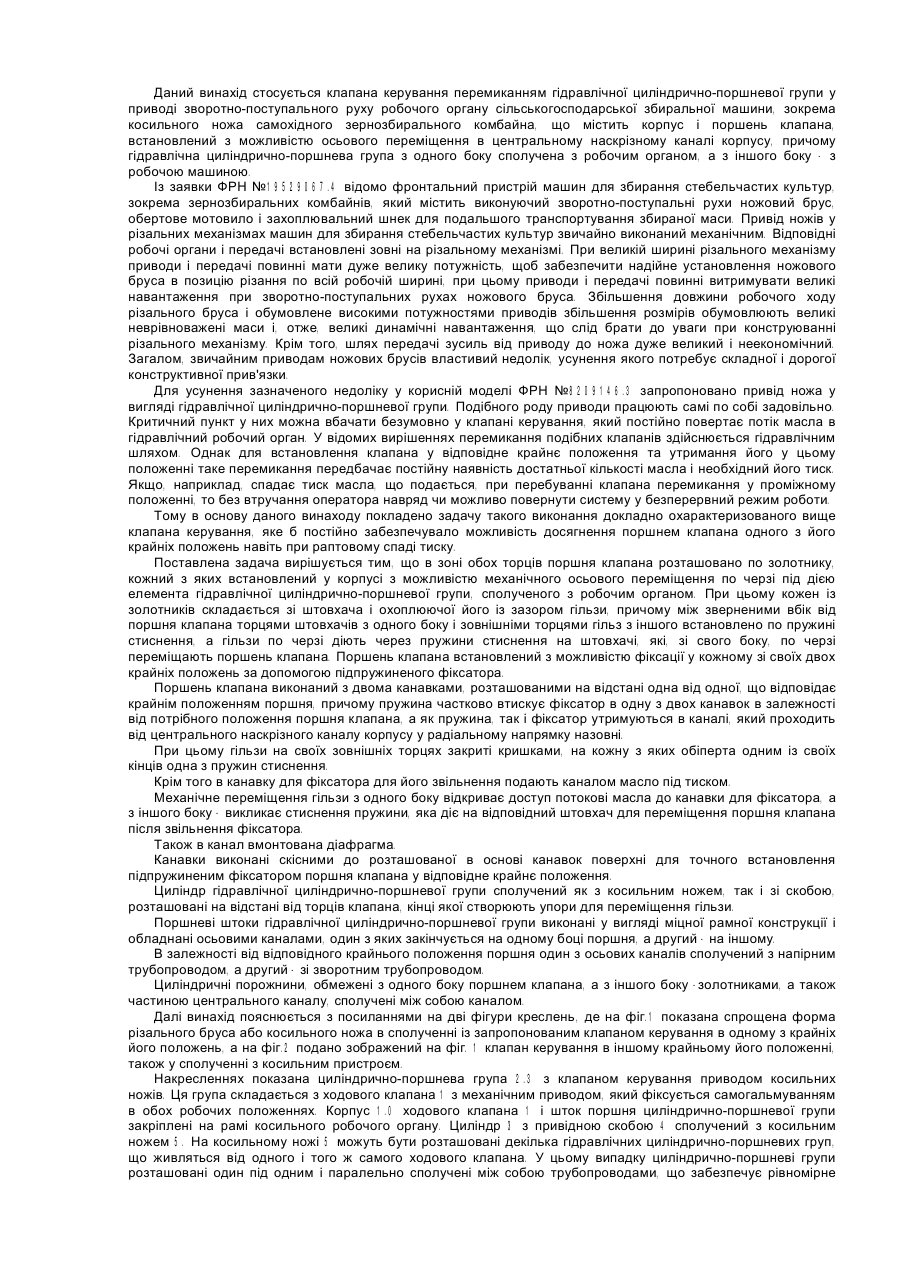
Клапан керування перемиканням гідравлічної циліндрично-поршневої групи у приводі елементів машин, що виконують зворотно-поступальні рухи
Номер патенту: 71931
Опубліковано: 17.01.2005
Автор: Роді Карл-Томас
МПК: F15B 15/00, A01D 69/00
Мітки: елементів, гідравлічної, групи, машин, клапан, зворотно-поступальні, перемиканням, рухи, виконують, керування, циліндрично-поршневої, приводі
Формула / Реферат:
1. Клапан керування перемиканням гідравлічної циліндрично-поршневої групи у приводі зворотно-поступального руху робочого органу сільськогосподарської збиральної машини, зокрема косильного ножа самохідного зернозбирального комбайна, який містить корпус і поршень клапана, встановлений з можливістю осьового переміщення в центральному наскрізному каналі корпусу, причому гідравлічна циліндрично-поршнева група з одного боку сполучена з робочим...
Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі

Номер патенту: 67661
Опубліковано: 15.06.2004
Автори: Давидов Олександр Рубенович, Іщенко Сергій Олександрович, Жила Володимир Гаврилович
Мітки: обертальних, моделей, визначення, пристрій, аеродинамічний, похідних, трубі
Формула / Реферат:
1. Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі, що містить електропривід з муфтою, маховик, кривошипно-шатунний механізм, а також державку з закріпленою на ній моделлю, який відрізняється тим, що державка з'єднана з шатуном через два послідовно з'єднані за допомогою гнучкого зв'язку профільовані шківи.2. Пристрій за п. 1, який відрізняється тим, що перший шків з'єднаний із шатуном і має кривизну...
Фіксаційно-реабілітаційна механічна шина “методист” для розробки рухів у плечовому суглобі
Номер патенту: 5150
Опубліковано: 15.02.2005
Автор: Сухін Юрій Віталійович
МПК: A61F 5/00
Мітки: розробки, шина, механічна, фіксаційно-реабілітаційна, плечовому, суглобі, рухів, методист
Формула / Реферат:
Фіксаційно-реабілітаційна механічна шина для розробки рухів у плечовому суглобі, що містить рамку, стійку для фіксації шини до тулуба, ложемент для фіксації передпліччя, яка відрізняється тим, що вона додатково має ложемент для фіксації плеча, черв'ячні механізми, вісь обертання плечового ложемента й стійку з дугоподібним пазом.
Попередній патент: Газорегулювальна арматура
Наступний патент: Спосіб контролю температури хімічних реакцій в псевдоізотермічних умовах та псевдоізотермічний хімічний реактор
Випадковий патент: Пірамідальна конструкція