Спосіб дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь та пристрій для його здійснення
Формула / Реферат
1. Спосіб дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь, що включає дискретне вимірювання в процесі руху системи, проектування на осі базової системи координат, підсумовування однойменних проекцій з врахуванням початкових умов, який відрізняється тим, що визначають середнє арифметичне значення поворотних коліс ψс між лівим кутом повороту ψл та правим кутом повороту ψп і визначають значення поточних координат за наступними залежностями:
![]() ;
;
![]() ;
;
![]() ,
,
де ![]() - відстань між осями передніх та задніх коліс, величина бази роботизованої системи моніторингу стану сільськогосподарських угідь;
- відстань між осями передніх та задніх коліс, величина бази роботизованої системи моніторингу стану сільськогосподарських угідь;
![]() - початкове значення кута між напрямком повздовжньої осі та однією із осей опорної прямокутної системи координат;
- початкове значення кута між напрямком повздовжньої осі та однією із осей опорної прямокутної системи координат;
∆SN - відстань між двома пройденими точками, де N = 0,1,2,…∞;
![]() - елемент пройденого шляху;
- елемент пройденого шляху;
ψс - середнє арифметичне значення поворотних коліс між лівим кутом повороту ψл та правим кутом повороту ψп.
2. Пристрій для дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь, що містить датчик шляху та координатор з початковим значенням шляху, датчик кута між повздовжньою віссю роботизованої системи та проекцією на горизонтальну площину поворотних коліс (лівого та правого), який відрізняється тим, що додатково містить GPS-приймач визначення координат роботизованої системи, що зв'язаний своїм виходом із входом мікропроцесора з можливістю визначення кута повороту керованих коліс за встановленим алгоритмом, а мікропроцесор своїм виходом з'єднаний з координатором руху.
Текст
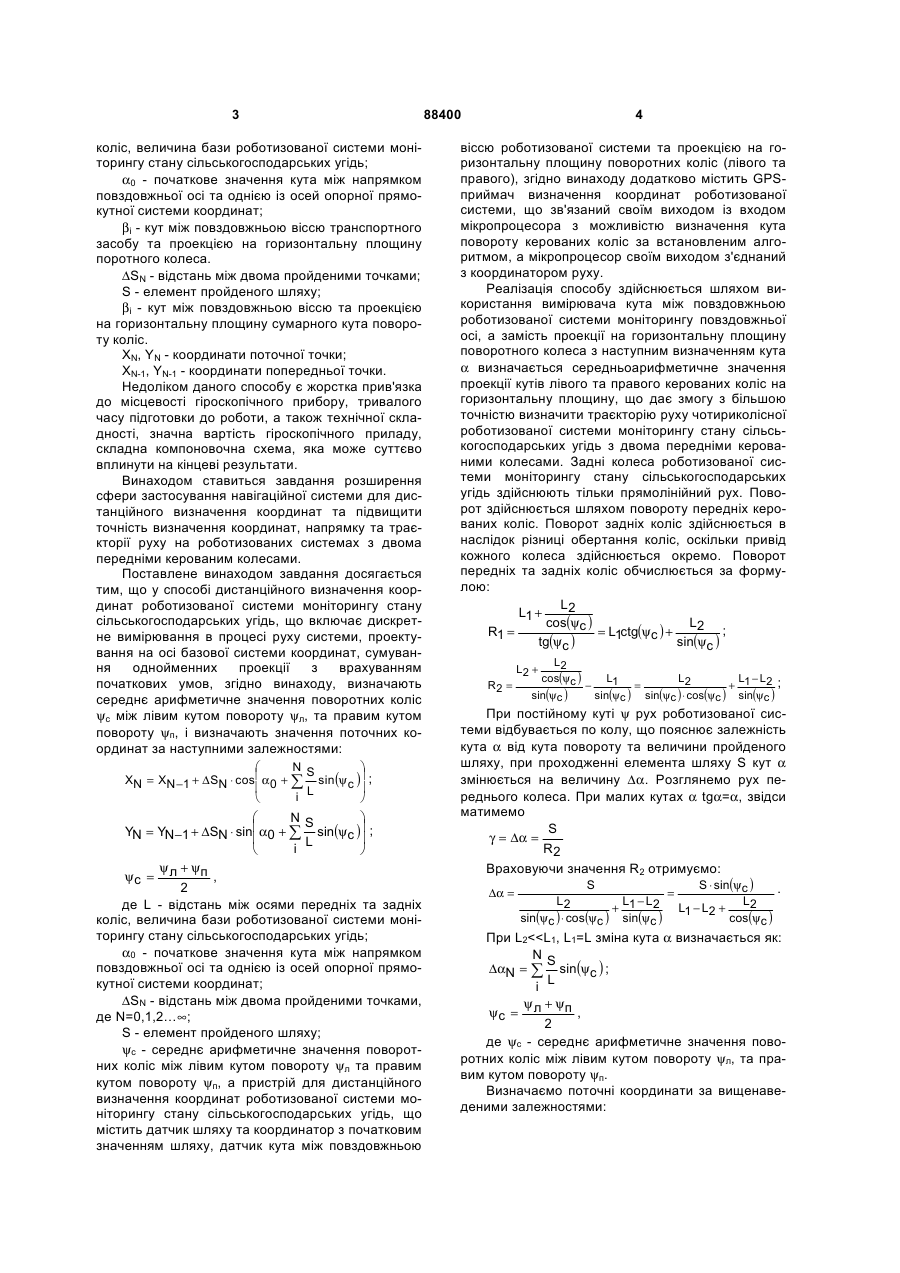
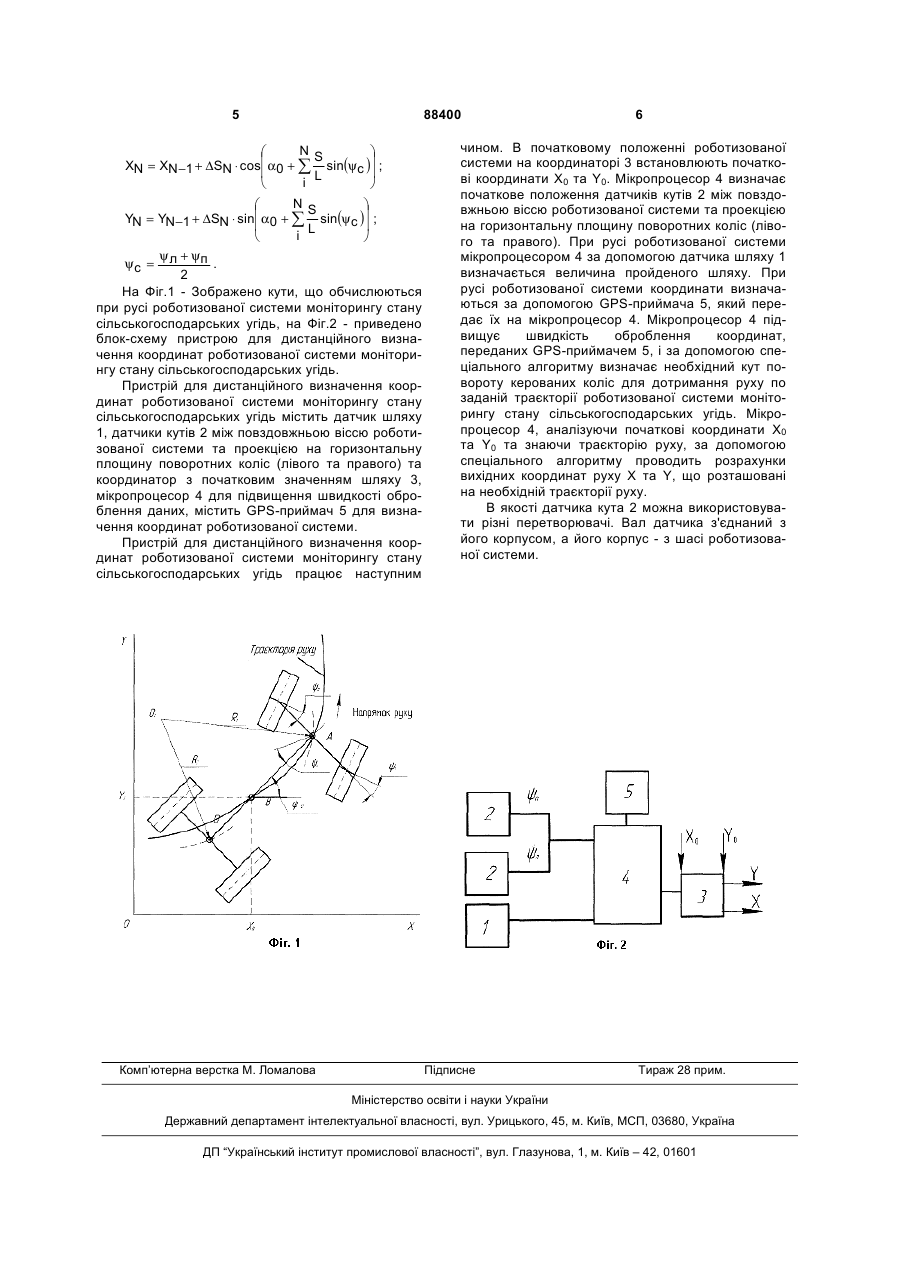
1. Спосіб дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь, що включає дискретне вимірювання в процесі руху системи, проектування на осі базової системи координат, підсумовування однойменних проекцій з врахуванням початкових умов, який відрізняється тим, що визначають середнє арифметичне значення поворотних коліс ψс між лівим кутом повороту ψл та правим кутом повороту ψп і визначають значення поточних координат за наступними залежностями: NS ⎛ ⎞ XN = XN−1 + ∆SN ⋅ cos⎜ α0 + ∑ sin(ψc )⎟ ; ⎜ ⎟ L i ⎝ ⎠ NS ⎛ ⎞ YN = YN−1 + ∆SN ⋅ sin⎜ α0 + ∑ sin(ψc )⎟ ; ⎜ ⎟ L i ⎝ ⎠ ψ л + ψп , 2 де L - відстань між осями передніх та задніх коліс, величина бази роботизованої системи моніторингу стану сільськогосподарських угідь; α0 - початкове значення кута між напрямком повздовжньої осі та однією із осей опорної прямокутної системи координат; ∆SN - відстань між двома пройденими точками, де N = 0,1,2,…∞; S - елемент пройденого шляху; ψс - середнє арифметичне значення поворотних коліс між лівим кутом повороту ψл та правим кутом повороту ψп. 2. Пристрій для дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь, що містить датчик шляху та координатор з початковим значенням шляху, датчик кута між повздовжньою віссю роботизованої системи та проекцією на горизонтальну площину поворотних коліс (лівого та правого), який відрізняється тим, що додатково містить GPS-приймач визначення координат роботизованої системи, що зв'язаний своїм виходом із входом мікропроцесора з можливістю визначення кута повороту керованих коліс за встановленим алгоритмом, а мікропроцесор своїм виходом з'єднаний з координатором руху. Винахід відноситься до навігаційних вимірів та може бути використаний для визначення прямокутних координат за допомогою інформації про пройдений шлях та кута між повздовжньою віссю роботизованої системи та середнього арифметичного проекції кутів керованих коліс на горизонтальну площину. Відомий спосіб визначення координат наземного транспортного засобу (патент СССР №1818534, «Способ определения координат наземного колесного объекта и устройство для его осуществления». Опубл. 30.05.1993. Бюл. №20). Пропонується використовувати вимірювання кута між повздовжньою віссю наземного колісного об'єкта та проекцією на горизонтальну площину поворотного колеса. Цей спосіб заключається у визначенні координат наземного транспортного засобу за формулою: NS ⎛ ⎞ XN = XN−1 + ∆SN ⋅ cos⎜ α0 + ∑ sin(βi )⎟ ; ⎜ ⎟ L i ⎝ ⎠ NS ⎛ ⎞ YN = YN−1 + ∆SN ⋅ sin⎜ α0 + ∑ sin(βi )⎟ . ⎜ ⎟ L i ⎝ ⎠ де L - відстань між осями передніх та задніх (19) UA (11) 88400 (13) C2 ψc = 3 коліс, величина бази роботизованої системи моніторингу стану сільськогосподарських угідь; α0 - початкове значення кута між напрямком повздовжньої осі та однією із осей опорної прямокутної системи координат; βі - кут між повздовжньою віссю транспортного засобу та проекцією на горизонтальну площину поротного колеса. ∆SN - відстань між двома пройденими точками; S - елемент пройденого шляху; βі - кут між повздовжньою віссю та проекцією на горизонтальну площину сумарного кута повороту коліс. XN, YN - координати поточної точки; XN-1, YN-1 - координати попередньої точки. Недоліком даного способу є жорстка прив'язка до місцевості гіроскопічного прибору, тривалого часу підготовки до роботи, а також технічної складності, значна вартість гіроскопічного приладу, складна компоновочна схема, яка може суттєво вплинути на кінцеві результати. Винаходом ставиться завдання розширення сфери застосування навігаційної системи для дистанційного визначення координат та підвищити точність визначення координат, напрямку та траєкторії руху на роботизованих системах з двома передніми керованим колесами. Поставлене винаходом завдання досягається тим, що у способі дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь, що включає дискретне вимірювання в процесі руху системи, проектування на осі базової системи координат, сумування однойменних проекції з врахуванням початкових умов, згідно винаходу, визначають середнє арифметичне значення поворотних коліс ψс між лівим кутом повороту ψл, та правим кутом повороту ψп, і визначають значення поточних координат за наступними залежностями: NS ⎛ ⎞ XN = XN −1 + ∆SN ⋅ cos⎜ α0 + ∑ sin(ψ c )⎟ ; ⎜ ⎟ L i ⎝ ⎠ NS ⎞ ⎛ YN = YN −1 + ∆SN ⋅ sin⎜ α0 + ∑ sin(ψc )⎟ ; ⎟ ⎜ L i ⎠ ⎝ ψ л + ψп ψc = , 2 де L - відстань між осями передніх та задніх коліс, величина бази роботизованої системи моніторингу стану сільськогосподарських угідь; α0 - початкове значення кута між напрямком повздовжньої осі та однією із осей опорної прямокутної системи координат; ∆SN - відстань між двома пройденими точками, де N=0,1,2…∞; S - елемент пройденого шляху; ψс - середнє арифметичне значення поворотних коліс між лівим кутом повороту ψл та правим кутом повороту ψп, а пристрій для дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь, що містить датчик шляху та координатор з початковим значенням шляху, датчик кута між повздовжньою 88400 4 віссю роботизованої системи та проекцією на горизонтальну площину поворотних коліс (лівого та правого), згідно винаходу додатково містить GPSприймач визначення координат роботизованої системи, що зв'язаний своїм виходом із входом мікропроцесора з можливістю визначення кута повороту керованих коліс за встановленим алгоритмом, а мікропроцесор своїм виходом з'єднаний з координатором руху. Реалізація способу здійснюється шляхом використання вимірювача кута між повздовжньою роботизованої системи моніторингу повздовжньої осі, а замість проекції на горизонтальну площину поворотного колеса з наступним визначенням кута α визначається середньоарифметичне значення проекції кутів лівого та правого керованих коліс на горизонтальну площину, що дає змогу з більшою точністю визначити траєкторію руху чотириколісної роботизованої системи моніторингу стану сільськогосподарських угідь з двома передніми керованими колесами. Задні колеса роботизованої системи моніторингу стану сільськогосподарських угідь здійснюють тільки прямолінійний рух. Поворот здійснюється шляхом повороту передніх керованих коліс. Поворот задніх коліс здійснюється в наслідок різниці обертання коліс, оскільки привід кожного колеса здійснюється окремо. Поворот передніх та задніх коліс обчислюється за формулою: L2 L1 + L2 cos(ψc ) ; R1 = = L1ctg(ψc ) + sin(ψc ) tg(ψc ) R2 = L2 cos(ψc ) L1 L2 L −L − = + 1 2 ; sin(ψc ) sin(ψc ) sin(ψc ) ⋅ cos(ψc ) sin(ψc ) L2 + При постійному куті ψ рух роботизованої системи відбувається по колу, що пояснює залежність кута α від кута повороту та величини пройденого шляху, при проходженні елемента шляху S кут α змінюється на величину ∆α. Розглянемо рух переднього колеса. При малих кутах α tgα=α, звідси матимемо S γ = ∆α = R2 Враховуючи значення R2 отримуємо: S ⋅ sin(ψc ) S . ∆α = = L2 L −L + 1 2 sin(ψc ) ⋅ cos(ψc ) sin(ψc ) L1 − L2 + L2 cos(ψc ) При L2
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of remote determination of coordinates of robotic system of monitoring of state of agricultural grounds and device for its realization
Автори англійськоюBrovarets Oleksandr Oleksandrovych
Назва патенту російськоюСпособ дистанционного определения координат роботизированной системы мониторинга состояния сельскохозяйственных угодий и устройство для его осуществления
Автори російськоюБроварец Александр Александрович
МПК / Мітки
МПК: G01C 21/04
Мітки: дистанційного, пристрій, угідь, роботизованої, спосіб, визначення, сільськогосподарських, стану, координат, здійснення, моніторингу, системі
Код посилання
<a href="https://ua.patents.su/3-88400-sposib-distancijjnogo-viznachennya-koordinat-robotizovano-sistemi-monitoringu-stanu-silskogospodarskikh-ugid-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб дистанційного визначення координат роботизованої системи моніторингу стану сільськогосподарських угідь та пристрій для його здійснення</a>
Підвіска керованого колеса роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь
Номер патенту: 33834
Опубліковано: 10.07.2008
Автор: Броварець Олександр Олександрович
МПК: B60G 3/00
Мітки: підвіска, керованого, моніторингу, стану, сільськогосподарських, ходу, системі, стабільності, колеса, підвищення, угідь, роботизованої
Формула / Реферат:
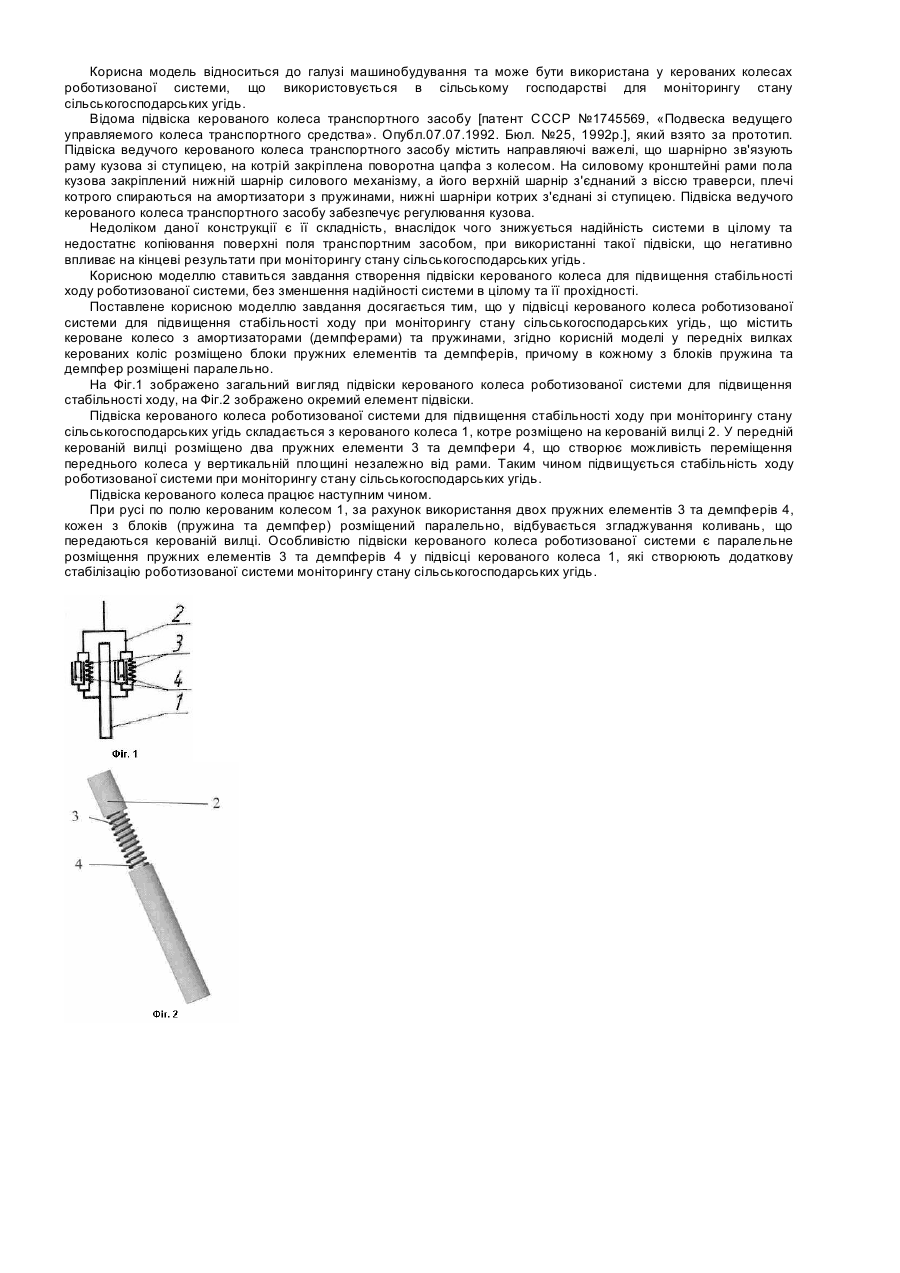
Підвіска керованого колеса роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь, що містить кероване колесо з амортизаторами (демпферами) та пружинами, яка відрізняється тим, що у передніх вилках керованих коліс розміщено блоки пружних елементів та демпферів, причому в кожному з блоків пружина та демпфер розміщені паралельно.
Підвіска роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь
Номер патенту: 33835
Опубліковано: 10.07.2008
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: підвищення, сільськогосподарських, роботизованої, стану, системі, стабільності, моніторингу, ходу, угідь, підвіска
Формула / Реферат:
Підвіска роботизованої системи для підвищення стабільності ходу при моніторингу стану сільськогосподарських угідь, що містить передню та задню піврами, яка відрізняється тим, що у вилках керованих коліс, котрі шарнірно з'єднані з передньою піврамою, розміщені пружні елементи, а задня піврама за допомогою пружних елементів, що розміщені під кутом до горизонтальної поверхні, та шарнірів з'єднана з передньою піврамою, з можливістю утримання...
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь
Номер патенту: 44255
Опубліковано: 25.09.2009
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: засіб, сільськогосподарських, моніторингу, угідь, системі, стану, зору, стабілізацією, транспортний, технічного
Формула / Реферат:
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь, що містить систему технічного зору, встановлену на телескопічну штангу, який відрізняється тим, що містить стабілізаційну систему з пружним елементом, який розміщений в точці кріплення телескопічної штанги до транспортного засобу, що дозволяє зменшити коливання та стабілізувати систему технічного зору для моніторингу стану...
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь
Номер патенту: 44256
Опубліковано: 25.09.2009
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: системі, зору, стабілізацією, транспортний, угідь, моніторингу, технічного, сільськогосподарських, стану, засіб
Формула / Реферат:
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь, що містить систему технічного зору, встановлену на телескопічну штангу, який відрізняється тим, що транспортний засіб містить стабілізаційну систему поплавкового типу, яка розміщена в точці кріплення телескопічної штанги до транспортного засобу, що дозволяє зменшити коливання та стабілізувати систему технічного зору для моніторингу...
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь
Номер патенту: 44254
Опубліковано: 25.09.2009
Автор: Броварець Олександр Олександрович
МПК: B62D 21/12
Мітки: угідь, стану, моніторингу, сільськогосподарських, технічного, зору, засіб, транспортний, стабілізацією, системі
Формула / Реферат:
Транспортний засіб із стабілізацією системи технічного зору для моніторингу стану сільськогосподарських угідь, що містить систему технічного зору, встановлену на телескопічну штангу, який відрізняється тим, що містить стабілізаційну систему з шарніром та в'язким елементом, які розміщені в точці кріплення телескопічної штанги до транспортного засобу, що дозволяє зменшити коливання та стабілізувати систему технічного зору для моніторингу стану...
Попередній патент: Спосіб запалювання вугільного пласта при підземній газифікації
Наступний патент: Насосна установка для забору підземних вод
Випадковий патент: Спосіб лікування місцевого післяампутаційного больового синдрому