Спосіб повороту транспортного засобу у межах координатно-транспортної системи мостового землеробства та програмований транспортний засіб для його здійснення
Номер патенту: 91500
Опубліковано: 10.08.2010
Автори: Безрукавий Сергій Вікторович, Улексін Василь Олексійович, Бойко Владислав Борисович
Формула / Реферат
1. Спосіб повороту транспортного засобу у межах координатно-транспортної системи мостового землеробства, який відрізняється тим, що транспортний засіб зупиняють на перехресті, виважують разом із вантажем і у виваженому стані розвертають на кут 90 градусів, опускають і продовжують прямолінійний рух у новому напрямку.
2. Транспортний засіб для системи мостового землеробства з двигуном, гальмами, підйомним та поворотним механізмами, який відрізняється тим, що додатково обладнаний програмним пристроєм, датчиками положення відносно перехрестя та системою керування з двома входами та чотирма виходами, перший вхід якої має зв'язок з програмним пристроєм, другий – сполучено з датчиками положення відносно перехрестя, а виходи з'єднані з входами керування двигуном, гальмами, підйомним та поворотним механізмами, відповідно.
Текст
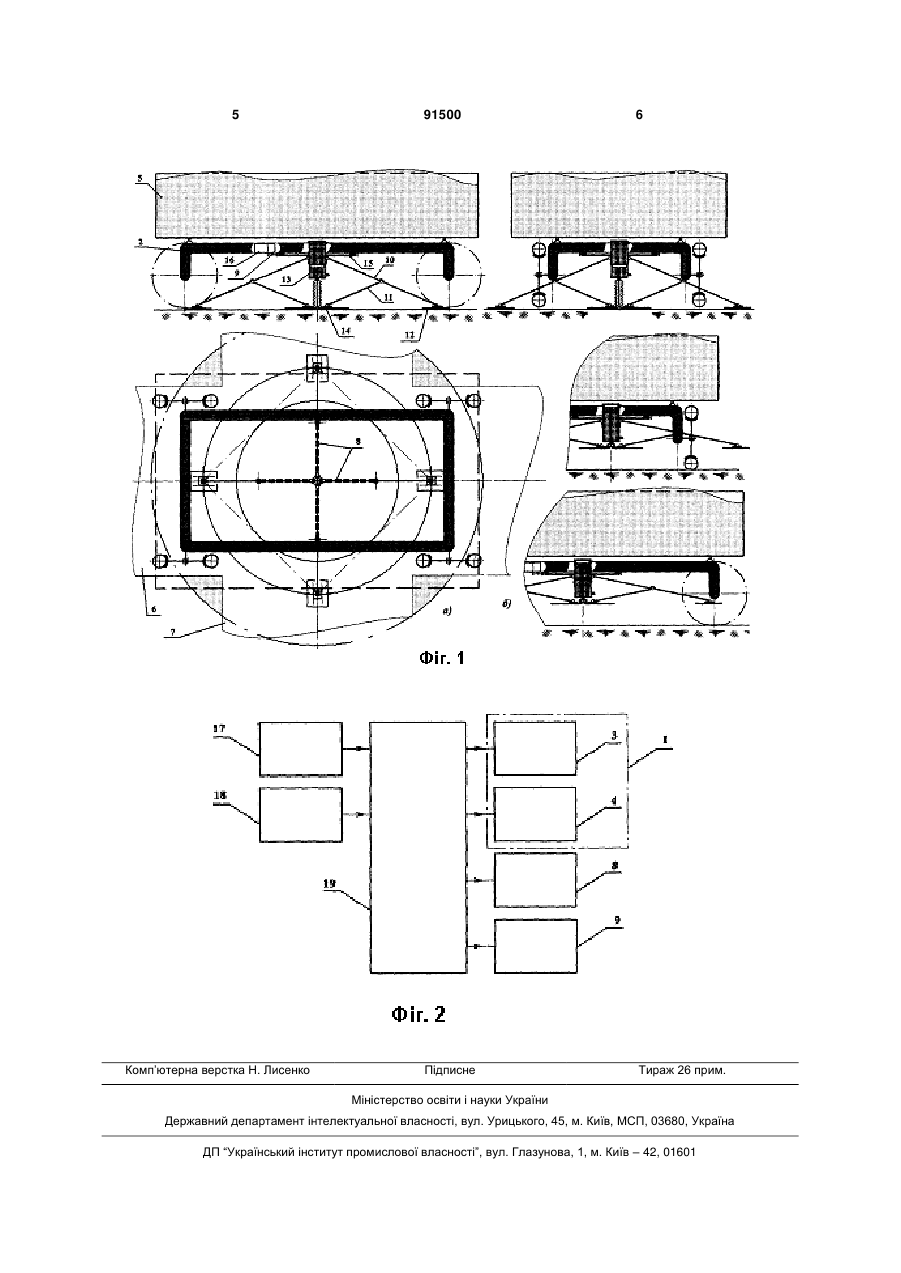
1. Спосіб повороту транспортного засобу у межах координатно-транспортної системи мостового землеробства, який відрізняється тим, що транспортний засіб зупиняють на перехресті, виважують разом із вантажем і у виваженому стані розвертають на кут 90 градусів, опускають і продовжують прямолінійний рух у новому напрямку. 2. Транспортний засіб для системи мостового землеробства з двигуном, гальмами, підйомним та поворотним механізмами, який відрізняється тим, що додатково обладнаний програмним пристроєм, датчиками положення відносно перехрестя та системою керування з двома входами та чотирма виходами, перший вхід якої має зв'язок з програмним пристроєм, другий – сполучено з датчиками положення відносно перехрестя, а виходи з'єднані з входами керування двигуном, гальмами, підйомним та поворотним механізмами, відповідно. Винахід відноситься до сільського господарства, а саме - до агромостової техніки, відмінною рисою якої є поділ поля на агротехнічну зону та інженерну зону з координатно-транспортною системою, призначеною для руху всіх технологічних машин, в тому числі і транспортних засобів. При наявності координатно-транспортної системи рух машин здійснюється лише прямолінійно у двох взаємно перпендикулярних напрямках. Найбільш розповсюджені звичайні транспортні засоби мають колісний рушій та рульове керування, яке дозволяє змінювати напрямок руху за рахунок зміни положення направляючих коліс. При цьому транспортний засіб здійснює поворот з певним радіусом. Недоліком відомих транспортних засобів є неможливість практичної автоматизації транспортних процесів та складність досягнення малих радіусів повороту, що в умовах руху по транспортних доріжках координатно-транспортної системи призводить до затоптування рослин на перехрестях, зменшуючи продуктивну площу поля (Улексін В.О. Транспортне забезпечення агромостової системи // Вісник Дніпропетровського державного аграрного університету, №1, 2006. С.19-23). Відомі транспортні засоби, які з метою поліпшення прохідності обладнані допоміжними підйомним та поворотним механізмами, які повертають машину у виваженому стані, що дозволяє здійснювати маневрування в умовах обмеженого (19) UA (11) 91500 (21) a200608342 (22) 25.07.2006 (24) 10.08.2010 (46) 10.08.2010, Бюл.№ 15, 2010 р. (72) УЛЕКСІН ВАСИЛЬ ОЛЕКСІЙОВИЧ, БЕЗРУКАВИЙ СЕРГІЙ ВІКТОРОВИЧ, БОЙКО ВЛАДИСЛАВ БОРИСОВИЧ (73) ДНІПРОПЕТРОВСЬКИЙ ДЕРЖАВНИЙ АГРАРНИЙ УНІВЕРСИТЕТ (56) SU 142564, 27.04.1961 GB 415271, 23.08.1934 GB 499234, 20.01.1939 EP 0678430, B60S9/14, 25.10.1995 WO 03/029058, B60S13/02, 9/14, 10.04.2003 US 1827853, 20.10.1931 US 2235595, 18.05.1941 US 3239019, 08.03.1966 JP 60252046, B60S13/02, 12.12.1985 DE 4033147, B62D55/04, B60T1/12, 23.04.1992 DE 1144606, 28.02.1963 GB 2148215, B60F1/00, 30.05.1985 DE 903541, 08.02.1954 DE 1125970, 22.03.1962 C2 2 (13) 1 3 простору, наприклад, при парковках або при розворотах на єдиній смузі руху (патенти WO 03/029058 A1, JP60252046(A) - прототип). Метою винаходу є автоматизація водіння транспортних засобів у межах координатнотранспортної системи мостового землеробства та зменшення площі, необхідної для повороту транспортного засобу. Поставлена мета досягається тим, що для здійснення повороту транспортний засіб зупиняють, виважують разом з вантажем і у виваженому стані розвертають на необхідний кут 90°, опускають і продовжують прямолінійний рух у новому напрямку. Метою винаходу є також здійснення автоматичного програмованого повороту транспортного засобу при роботі у складі системи мостового землеробства. Поставлена мета досягається тим, що колісний засіб з двигуном, гальмами, підйомним та поворотним механізмами додатково обладнаний програмним пристроєм, датчиками положення відносно перехрестя та системою керування з двома входами та чотирма виходами, перший вхід якої має зв'язок з програмним пристроєм, другий сполучено з датчиком положення відносно перехрестя, а виходи з'єднані з входами керування двигуном, гальмами, підйомним та поворотним механізмами. При досягненні перехрестя, на якому слід змінити напрямок руху, програмний пристрій дає сигнал на перший вхід системи керування, яка послідовно виконує наступні дії: керуючи двигуном та гальмами здійснює зупинку транспортного засобу у місці, точно визначеному за сигналами датчиків положення відносно перехрестя місці, керуючи підйомним механізмом виважує транспортний засіб разом з вантажем до відриву опорних коліс від поверхні дороги, керуючи поворотним механізмом розвертає транспортний засіб у нове положення, підйомним механізмом опускає його на транспортну доріжку і, керуючи двигуном, продовжує рух у потрібному напрямку. Схеми компоновки та взаємодії окремих елементів запропонованого транспортного засобу подані на Фіг.1 та Фіг.2. Транспортний засіб включає чотириколісну ходову частину 1 з рамою 2, двигуном 3, гальмами 4 та вантажною платформою 5, встановленою на рамі 2 ходової частини, яка може рухатись вздовж транспортних доріжок 6 та 7. До рами 2 прикріплено підйомний механізм 8 та поворотний механізм 9. Підйомний механізм 8 складається з просторового шарнірного чотириланкового механізму, утвореного чотирма парами важелів 10, 11 з опорними площадками 12, та домкрата 13, наприклад, гідравлічного з центральною опорною площадкою 14. Поворотний механізм 9 включає 91500 4 поворотну опору 15 з зубчастим вінцем, жорстко встановлену на підйомному механізмі 8, на якій лежить рама 2 транспортного засобу, та поворотного приводу 16. Транспортний засіб обладнано також програмним пристроєм 17, датчиком положення відносно перехрестя 18 та системою керування 19. Транспортний засіб працює наступним чином. При прямолінійному рухові по доріжці підйомний механізм 8 знаходиться у транспортному положенні, як показано на Фіг.1б. Корекція прямолінійності руху здійснюється будь-яким відомим і зручним способом (наприклад, направляючими колесами, регулюванням швидкості приводу правих і лівих ведучих коліс або їх роздільним гальмуванням). При необхідності повороту двигун 3 вимикають, гальмами 4 здійснюють зупинку транспортного засобу точно в центрі перетину транспортних доріжок 6 і 7, домкратом 13 приводять у дію підйомний механізм, який через поворотну опору 15 і раму 2 виважує транспортний засіб до відриву опорних коліс від поверхні доріжок (Фіг.1а). Після підйому транспортного засобу вмикають поворотний привід 16, який через зубчастий вінець поворотної опори 15 розвертає транспортний засіб на 90°. Після цього домкрат 13 переводить підйомний механізм у транспортне положення і транспортний засіб продовжує рух у новому напрямку. Програмне керування поворотом транспортного засобу здійснюється за допомогою системи керування 19, яка може здійснювати увімкнення та вимкнення двигуна 3, гальм 4, підйомного механізму 8 та поворотного механізму 9. Початок повороту наступає по сигналу програмного пристрою 17, в результаті дії якого система керування відслідковує сигнал датчика положення відносно перехрестя 18 і, керуючи двигуном 3 та гальмами 4, зупиняє транспортний засіб точно на перетині транспортних доріжок. Після зупинки транспортного засобу вмикається підйомний механізм 8 та, після підйому транспортного засобу, поворотний механізм 9. Після розвороту транспортного засобу на 90° система керування 19 вимикає поворотний механізм, приводить у дію підйомний механізм, переводячи його в транспортне положення та опускаючи транспортний засіб. Після опускання транспортного засобу система керування 19 вмикає двигун 3 і продовжує рух транспортного засобу у потрібному напрямку. Використання запропонованого транспортного засобу дозволяє автоматизувати процес повороту транспортного засобу та здійснювати повороти без затоптування рослин на перехрестях транспортних доріжок та автоматизувати повороти транспортного засобу. 5 Комп’ютерна верстка Н. Лиcенко 91500 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod of turning vehicle within coordinate-transport system of bridge agriculture and programmable vehicle for its realization
Автори англійськоюUleksin Vasyl Oleksiiovych, Bezrukavyi Serhii Viktorovych, Boiko Vladyslav Borysovych
Назва патенту російськоюСпособ поворота транспортного средства в пределах координатно-транспортной системы мостового земледелия и программируемое транспортное средство для его осуществления
Автори російськоюУлексин Василий Алексеевич, Безрукавый Сергей Викторович, Бойко Владислав Борисович
МПК / Мітки
МПК: B60S 9/00, A01B 49/00
Мітки: здійснення, межах, системі, транспортний, засобу, повороту, мостового, координатно-транспортної, програмований, землеробства, транспортного, засіб, спосіб
Код посилання
<a href="https://ua.patents.su/3-91500-sposib-povorotu-transportnogo-zasobu-u-mezhakh-koordinatno-transportno-sistemi-mostovogo-zemlerobstva-ta-programovanijj-transportnijj-zasib-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб повороту транспортного засобу у межах координатно-транспортної системи мостового землеробства та програмований транспортний засіб для його здійснення</a>
Робочий транспортний засіб, вузол двигуна внутрішнього згоряння, спосіб експлуатації робочого транспортного засобу, транспортний засіб
Номер патенту: 89680
Опубліковано: 25.02.2010
Автори: Маз Брайан Джозеф, Чейні Марк Майкл
МПК: B60K 13/00, B60H 3/06, A01F 12/00
Мітки: двигуна, засіб, експлуатації, робочий, згоряння, внутрішнього, транспортний, транспортного, робочого, засобу, вузол, спосіб
Формула / Реферат:
1. Робочий транспортний засіб, який містить:корпус, двигун внутрішнього згоряння, який міститься у моторному відсіку у корпусі транспортного засобу; повітрозабирач совкового типу, розміщений біля верхньої частини корпуса транспортного засобу і звернений у напрямку нагору, причому повітрозабирач совкового типу може повертатися між першим закритим транспортним положенням і другим відкритим робочим положенням для спрямовування повітря до...
Транспортний засіб, рама транспортного засобу, м’язовий привід

Номер патенту: 38133
Опубліковано: 15.05.2001
Автор: Хребтань Геннадій Анатолійович
МПК: B62K 17/00, B62K 19/00, B62M 1/00
Мітки: м'язовий, транспортного, засобу, привід, транспортний, рама, засіб
Формула / Реферат:
1. Транспортний засіб, до складу якого входять рама, поворотне та неповоротне колесо(а), сидіння, опора для рук та м'язовий привод ножним та/або ручним хитаючимися "догори-вниз' або "вперед-назад" важелями із можливістю їх автономної або синхронної роботи, із механізмом вільного ходу і гнучкою та/або жорсткою прямою або і проміжною предачою на вісь ведучого колеса, який відрізняється тим, що вісь повороту важеля приводу, що...
Міст транспортного засобу, тяга, вісь транспортного засобу і транспортний засіб

Номер патенту: 87475
Опубліковано: 27.07.2009
Автори: Зобоцік Йоахім, Райнардс Марко, Кнеер Бернд, Тарасінскі Ніколай
МПК: B60L 11/00, B60G 9/00, B60K 17/30
Мітки: міст, вісь, засобу, засіб, транспортний, тяга, транспортного
Формула / Реферат:
1. Міст для транспортного засобу, який використовується в сільському господарстві або в промисловості зі встановленою переважно з можливістю коливання віссю (30) транспортного засобу, причому вісь (30) виконана з можливістю установки з можливістю обертання щонайменше двох коліс (28), із тягою (38), яка для підтримки підвіски осі встановлена з можливістю з'єднання одним кінцем з рамою (14) транспортного засобу (10) і іншим кінцем з віссю (30)...
Спосіб перетворення наземного транспортного засобу в літак і наземний транспортний засіб-літак
Номер патенту: 29921
Опубліковано: 15.11.2000
Автор: Босак Олександр Валер'янович
МПК: A63H 17/00, B64C 35/00, B60F 5/00, A63H 27/00
Мітки: транспортний, транспортного, спосіб, наземний, засобу, засіб-літак, перетворення, літак, наземного
Формула / Реферат:
1. Спосіб перетворення наземного транспортного засобу (н.т.з.) в літак, що включає зміну просторової орієнтації корпуса н.т.з. по відношенню до напрямку його руху, який відрізняється тим, що зміну просторової орієнтації корпуса транспортного засобу здійснюють в одній площині при знаходженні н.т.з. на землі, при цьому зміну просторової орієнтації сидіння пілота по відношенню до корпуса проводять теж на землі також в одній площині.2....
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині і пристрій для його здійснення
Номер патенту: 19834
Опубліковано: 15.01.2007
Автори: Денис Василь Володимирович, Козлинський Мирослав Петрович
МПК: B60C 23/00
Мітки: спосіб, вертикальний, пристрій, засобу, центра, колісного, положення, ваги, площині, здійснення, визначення, транспортного
Формула / Реферат:
Спосіб визначення положення центра ваги колісного транспортного засобу у вертикальній площині, що включає визначення тиску повітря в кожній шині коліс, його порівняння з розрахунковим, який відрізняється тим, що визначають зміну тиску повітря в кожній шині коліс при прямолінійному русі під час гальмування колісного транспортного засобу, визначають величини вертикальних і горизонтальних навантажень на кожне із коліс, за якими визначають...