Ваги для екскаватора “пряма лопата”
Номер патенту: 95687
Опубліковано: 25.08.2011
Автори: Бугаєнко Максим Георгійович, Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович
Формула / Реферат
Ваги для екскаватора, які містять датчик кута нахилу рукояті екскаватора, мікропроцесорний блок, клавіатуру, монітор, принтер, електронний інтерфейс для передачі даних по радіоканалу або по каналу GSM, кнопку заліку порції, при цьому вихід датчика кута нахилу рукояті екскаватора, клавіатура та кнопка заліку порції підключені до відповідних входів мікропроцесорного блока, а його відповідні виходи підведені до входів монітора, принтера та електронного інтерфейсу для передачі даних по радіоканалу або по каналу GSM, які відрізняються тим, що додатково введені силовимірювальний модуль вимірювання натягу каната екскаватора, аналого-цифровий перетворювач, датчик зсуву рукояті екскаватора та датчик кута нахилу корпуса екскаватора, при цьому силовимірювальний модуль має в своєму складі відхилювальний ролик та один або два тензодатчики, виходи яких поєднані зі входом аналого-цифрового перетворювача, вихід якого зв'язаний зі входом мікропроцесорного блока, а вихід датчика зсуву рукояті екскаватора та датчика кута нахилу корпуса екскаватора підключені до відповідних входів мікропроцесорного блока.
Текст
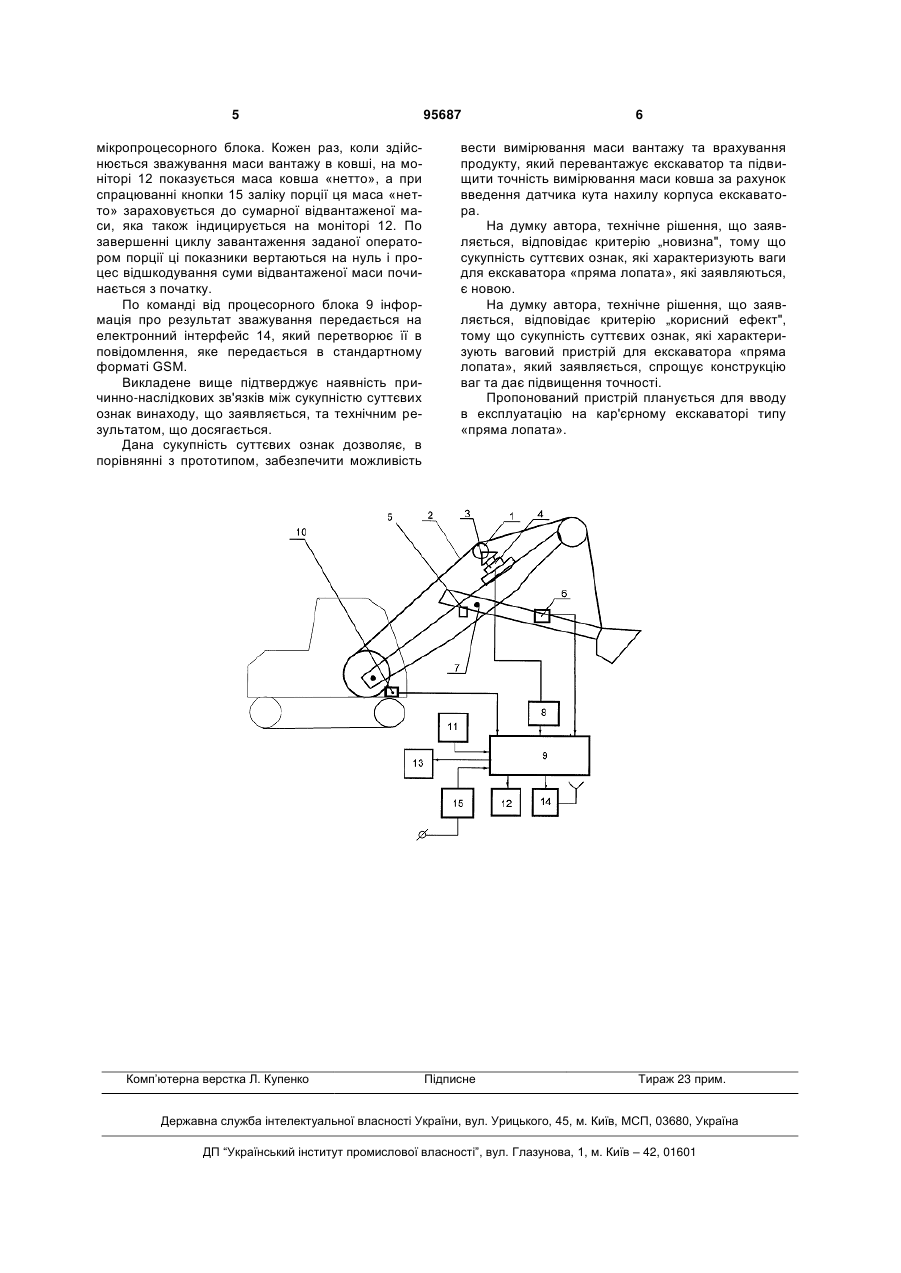
Ваги для екскаватора, які містять датчик кута нахилу рукояті екскаватора, мікропроцесорний блок, клавіатуру, монітор, принтер, електронний інтерфейс для передачі даних по радіоканалу або C2 2 (19) 1 3 хилу корпуса екскаватора, при цьому силовимірювальний модуль має в своєму складі відхилювальний ролик, один або два силовимірювальні тензорезисторні датчики, виходи яких підведені до входів з'єднуючого вузла, вихід якого поєднаний зі входом мікропроцесорного блока, а вихід датчика зсуву рукояті екскаватора та датчика кута нахилу корпуса екскаватора підключені до відповідних входів мікропроцесорного блока. Введення силовимірювального модуля вимірювання натягу каната екскаватора дає можливість врахувати зусилля, яке виникає в канаті при підйомі вантажу екскаватором, в залежності від його конкретного значення в кожному вимірюванні. Введення датчика зсуву рукояті екскаватора дає можливість уникнути впливу зсуву рукояті на точність вимірювання маси продукту в ковші шляхом вимірювання цього зсуву та корегування результатів вимірювання в залежності від його конкретного значення в кожному вимірюванні. Введення датчика кута нахилу корпуса екскаватора дає можливість уникнути впливу кута нахилу корпуса екскаватора на точність вимірювання маси продукту в ковші шляхом вимірювання цього кута та корегування результатів вимірювання в залежності від його конкретного значення в кожному вимірюванні. Загальний вигляд пристрою, що пропонується, відображений на кресленні. Пристрій, що пропонується, має силовимірювальний модуль вимірювання натягу каната екскаватора, який має в своєму складі відхилювальний ролик 1, який відхиляє канат 2 екскаватора, силовимірювальну платформу 3, яка спирається на тензодатчики 4, датчик 5 зсуву рукояті екскаватора, датчик 6 кута нахилу рукояті екскаватора, яка повертається навколо осі 7, аналого-цифровий перетворювач 8, процесорний блок 9, датчик 10 кута нахилу екскаватора, клавіатуру 11, монітор 12, принтер 13, електронний інтерфейс 14 для передачі вагових даних по радіоканалу або по каналу GSM, кнопка 15 заліку порції. Пристрій працює таким чином. Тензодатчик 3 видає електричний сигнал, який пропорційний натягу каната екскаватора. Цей сигнал надходить на аналого-цифровий перетворювач 8, який перетворює його в цифровий код, що по паралельних шинах надходить в процесорний блок 9. Після захвата ківшем екскаватора деякої порції вантажу рукоять екскаватора повертається навколо осі 7 повороту та пересувається вздовж своєї поздовжньої осі. Величина зсуву вздовж поздовжньої осі вимірюється датчиком 5 зсуву рукояті екскаватора, а величина кута повороту вимірюється датчиком 6 кута повороту рукояті екскаватора. В подальшому існує два варіанти реалізації алгоритму спрацювання ваг. В першому варіанті процесорний блок 9 дає команду на вимірювання сигналів, які надходять від аналого-цифрового перетворювача 8, в той момент, коли рукоять екскаватора опиняється в положенні, яке задається при настроюванні. В другому варіанті процесорний блок 9 дає команду на вимірювання сигналів, які надходять від аналого-цифрового перетворювача 95687 4 8 в той момент, коли кут нахилу рукояті екскаватора опиняється в положенні, яке задається при настроюванні. І в першому і в другому випадках процесорний блок 9 рахує масу вантажу, який знаходиться в ковші екскаватора по формулі, яка зв'язує між собою геометричні параметри елементів конструкції екскаватора та величину сигналу, які надходять від аналого-цифрового перетворювача 8 з величиною кута нахилу рукояті та величиною зсуву рукояті екскаватора. Перед початком роботи виконується тарування - при цьому заповнюється матриця ТАРА, яка зберігається в пам'яті мікропроцесорного блока 9 та в кожній своїй клітині має значення маси порожнього ковша, яке відповідає відповідному куту нахилу рукояті та відповідному значенню величини зсуву рукояті. В подальшому маса ковша «тара», яка відповідає даному положенню ковша, кожен раз відіймається від маси ковша «брутто» і таким чином підраховується маса ковша «нетто». Таким чином, завдяки введенню датчика 5 зсуву рукояті екскаватора фактичний зсув l рукояті вимірюється цим датчиком, а фактичний кут нахилу рукояті екскаватора вимірюється датчиком 6 кута нахилу рукояті і враховується при виконанні розрахунку маси ковша, тому результат вимірювання адекватно залежить від маси ковша. Залежність маси Mg вантажу у ковші від зусилля, яке виникає в тензометричному датчику та від параметрів екскаватора, встановлюється за формулою: Mg K(P Pt ) 2 p(p c )(p e)(p l) el cos , де Р - зусилля, яке виникає в силовимірювальному модулі в момент вимірювання; Pt - зусилля, яке виникає у силовимірювальному модулі, коли ківш є порожнім та знаходиться у тому положенні, яке існує в момент вимірювання. Значення цього зусилля знаходиться в матриці ТАРА та береться звідти при обрахуванні по формулі. В свою чергу, величини р та е вираховуються по формулах: р = с + е + l; у с 2 д2 2сlcos( ); у цих формулах: с - геометричний параметр екскаватора; - кут нахилу стріли екскаватора до горизон ту; При рахуванні маси вантажу у ковші у конкретному його підйомі програма процесорного блока 8 запрошує конкретне значення величини кута та величини зсуву l, які відповідають цьому зважуванню, та підраховує значення маси вантажу у ковші Mg згідно з вказаною вище функцією, визначаючи, таким чином, фактичне значення маси вантажу у ковші в залежності від виміряних параметрів l та . На початку завантаження кожної порції, наприклад 60 т - для завантаження залізничного вагона, оператор за допомогою клавіатури 13 вводить значення порції, яке запам'ятовується в пам'яті 5 мікропроцесорного блока. Кожен раз, коли здійснюється зважування маси вантажу в ковші, на моніторі 12 показується маса ковша «нетто», а при спрацюванні кнопки 15 заліку порції ця маса «нетто» зараховується до сумарної відвантаженої маси, яка також індицирується на моніторі 12. По завершенні циклу завантаження заданої оператором порції ці показники вертаються на нуль і процес відшкодування суми відвантаженої маси починається з початку. По команді від процесорного блока 9 інформація про результат зважування передається на електронний інтерфейс 14, який перетворює її в повідомлення, яке передається в стандартному форматі GSM. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак винаходу, що заявляється, та технічним результатом, що досягається. Дана сукупність суттєвих ознак дозволяє, в порівнянні з прототипом, забезпечити можливість Комп’ютерна верстка Л. Купенко 95687 6 вести вимірювання маси вантажу та врахування продукту, який перевантажує екскаватор та підвищити точність вимірювання маси ковша за рахунок введення датчика кута нахилу корпуса екскаватора. На думку автора, технічне рішення, що заявляється, відповідає критерію „новизна", тому що сукупність суттєвих ознак, які характеризують ваги для екскаватора «пряма лопата», які заявляються, є новою. На думку автора, технічне рішення, що заявляється, відповідає критерію „корисний ефект", тому що сукупність суттєвих ознак, які характеризують ваговий пристрій для екскаватора «пряма лопата», який заявляється, спрощує конструкцію ваг та дає підвищення точності. Пропонований пристрій планується для вводу в експлуатацію на кар'єрному екскаваторі типу «пряма лопата». Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюScales for excavator ”straight shovel”
Автори англійськоюBuhaienko Heorhii Yakovych, Buhaienko Yehor Heorhiiovych, Buhaienko Maksym Heorhiiovych
Назва патенту російськоюВесы для экскаватора "прямая лопата"
Автори російськоюБугаенко Георгий Яковлевич, Бугаенко Егор Георгиевич, Бугаенко Максим Георгиевич
МПК / Мітки
МПК: G01G 19/12, G01G 19/28, G01G 19/18
Мітки: ваги, лопата, пряма, екскаватора
Код посилання
<a href="https://ua.patents.su/3-95687-vagi-dlya-ekskavatora-pryama-lopata.html" target="_blank" rel="follow" title="База патентів України">Ваги для екскаватора “пряма лопата”</a>
Спосіб вимірювання маси вантажу, який підіймає екскаватор “пряма лопата”
Номер патенту: 56763
Опубліковано: 25.01.2011
Автори: Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович, Бугаєнко Максим Георгійович
МПК: G01G 19/00
Мітки: маси, вимірювання, лопата, екскаватор, підіймає, спосіб, пряма, вантажу
Формула / Реферат:
1. Спосіб вимірювання маси вантажу, що підіймає екскаватор "пряма лопата", який передбачає вимірювання кута нахилу корпусу екскаватора, вимірювання кута нахилу стріли екскаватора та вимірювання куту нахилу рукояті екскаватора, який відрізняється тим, що з метою покращення точності вимірювання у ваговому пристрої використовують вимірювання зусилля, яке виникає в підйомному канаті екскаватора, та вимірювання зсуву стріли...
Робочий орган екскаватора
Номер патенту: 50858
Опубліковано: 25.06.2010
Автор: Храмцов Анатолій Миколайович
МПК: E02F 5/00
Мітки: робочий, орган, екскаватора
Формула / Реферат:
Робочий орган екскаватора, що складається з рукояті, гідроциліндра та ковша, який відрізняється тим, що між вушками кріплення рукояті та гідроциліндра з ковшем жорстко встановлена металева пластина з віссю.
Робоче обладнання екскаватора
Номер патенту: 12574
Опубліковано: 15.02.2006
Автори: Деримедведь Денис Валерійович, Соколов Ігор Анатолійович, Хмара Леонід Андрійович
МПК: E02F 3/28
Мітки: робоче, обладнання, екскаватора
Формула / Реферат:
Робоче обладнання екскаватора, що містить стрілу, рукоять, ківш, гідроциліндри керування стрілою, рукоять і робочий орган, яке відрізняється тим, що воно додатково оснащено змінним модулем у вигляді порожнистого корпусу з металопрокату для подовження рукояті.
Робоче обладнання одноковшового гідравлічного екскаватора
Номер патенту: 43969
Опубліковано: 15.01.2002
Автори: Коваленко Руслан Вікторович, Хмара Леонід Андрійович, Соколов Ігор Анатолійович, Уріх Євген Йосипович
МПК: E02F 3/28
Мітки: обладнання, робоче, одноковшового, гідравлічного, екскаватора
Формула / Реферат:
Робоче обладнання одноківшового гідравлічного екскаватора, що містить стрілу, закріплену на поворотній колонці, телескопічну рукоятку, ківш, механізми приводу стріли, рукоятки ковша, яке відрізняється тим, що воно додатково обладнане висувною секцією стріли з механізмом її приводу, опорними елементами висувної секції, у вигляді напрямних, по дві з кожного боку секції, упорами та стягуючим хомутом.
Рукоять робочого устаткування гідравлічного екскаватора
Номер патенту: 26305
Опубліковано: 10.09.2007
Автори: Луць Віктор Петрович, Лопачук Вадим Леонідович
МПК: E02F 3/34
Мітки: рукоять, устаткування, робочого, екскаватора, гідравлічного
Формула / Реферат:
1. Рукоять робочого устаткування гідравлічного екскаватора, яка містить основу коробоподібної форми, на дальньому кінці якої розташовані дві гільзи з додатковими вушками для з'єднання зі штоком гідроциліндра стріли та вушко для встановлення гідроциліндра рукояті, яка відрізняється тим, що основа рукояті виконана на самій коробчастій балці та містить з боків листові фасонні накладки з перемичками між ними, що виконані із зазором до посадочної...
Попередній патент: Система наведення на сонце сонячних перетворювачів
Наступний патент: Роторно-лопатевий двигун
Випадковий патент: Тупа хрестовина з рухомим сердечником