Спосіб вимірювання маси вантажу, який підіймає екскаватор “пряма лопата”
Номер патенту: 56763
Опубліковано: 25.01.2011
Автори: Бугаєнко Максим Георгійович, Бугаєнко Георгій Якович, Бугаєнко Єгор Георгійович
Формула / Реферат
1. Спосіб вимірювання маси вантажу, що підіймає екскаватор "пряма лопата", який передбачає вимірювання кута нахилу корпусу екскаватора, вимірювання кута нахилу стріли екскаватора та вимірювання куту нахилу рукояті екскаватора, який відрізняється тим, що з метою покращення точності вимірювання у ваговому пристрої використовують вимірювання зусилля, яке виникає в підйомному канаті екскаватора, та вимірювання зсуву стріли екскаватора.
2. Спосіб за п. 1, який відрізняється тим, що для виміру зусилля, яке виникає в підйомному канаті екскаватора, використовують відхиляючі ролики.
3. Спосіб за п. 1, який відрізняється тим, що для виміру зусилля, яке виникає в підйомному канаті екскаватора, використовують датчики струму, які встановлюють у обмотці двигуна екскаватора.
4. Спосіб за п. 1, який відрізняється тим, що для виміру зусилля, яке виникає в підйомному канаті екскаватора, використовують датчики зусилля, які встановлюють у шків головного каната екскаватора.
Текст
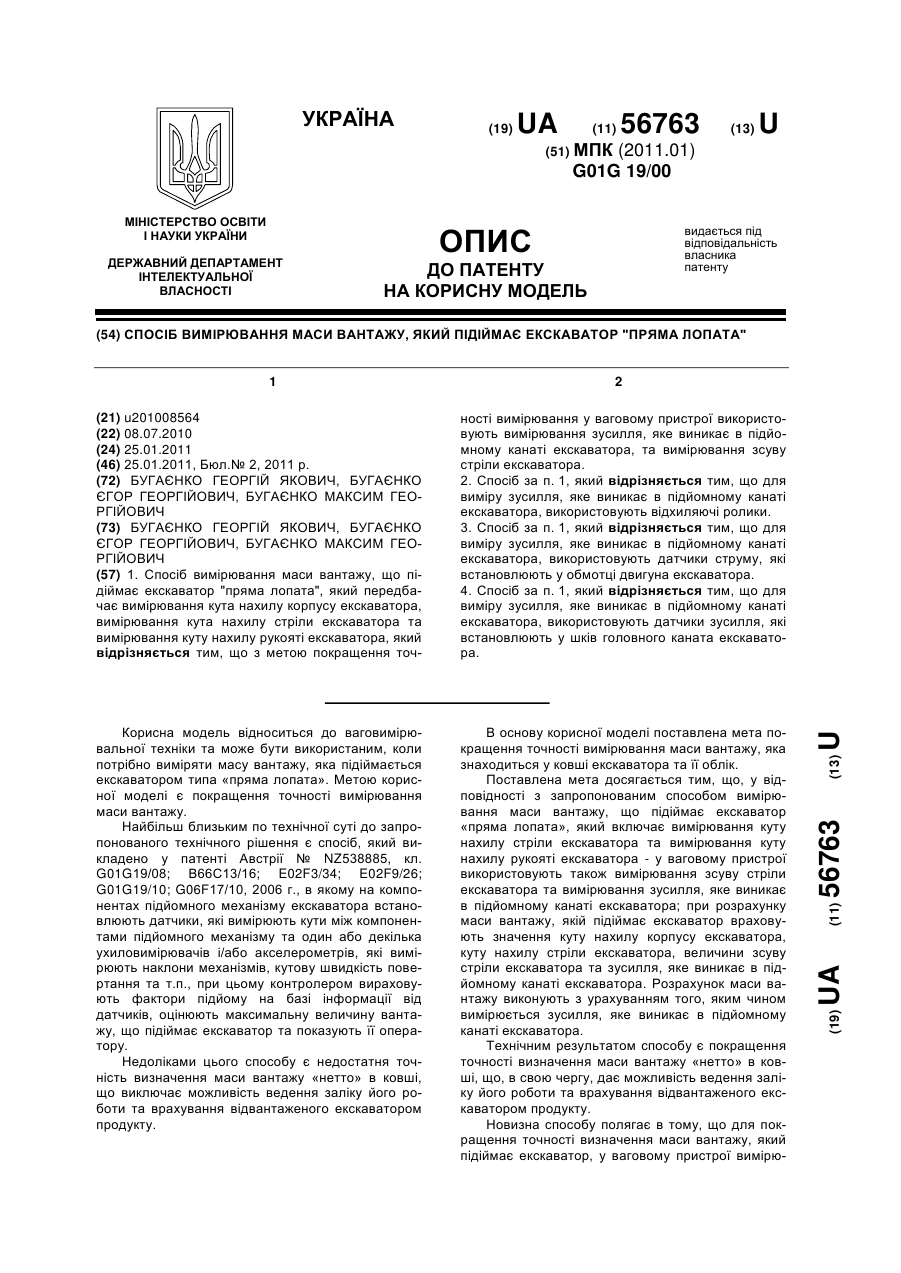
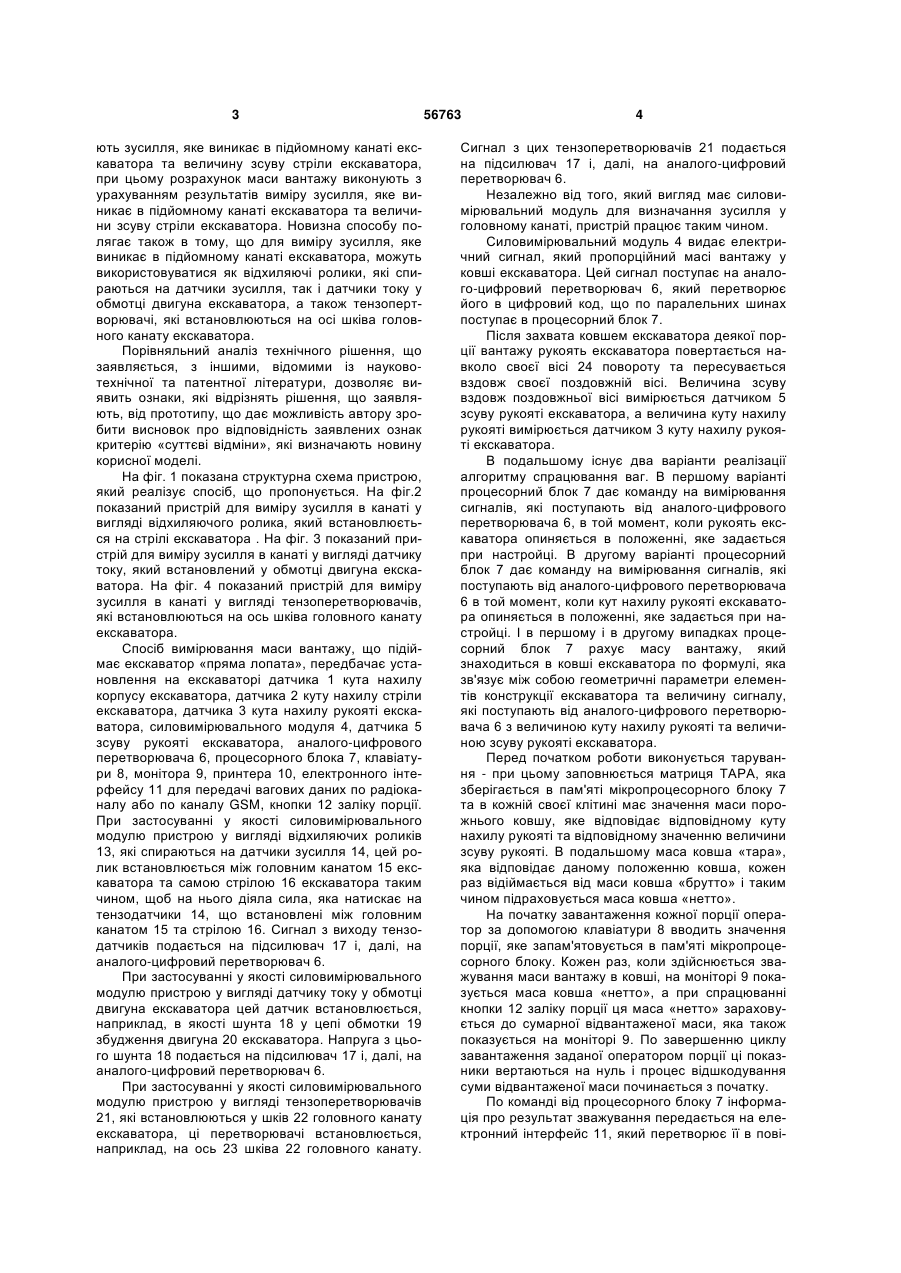
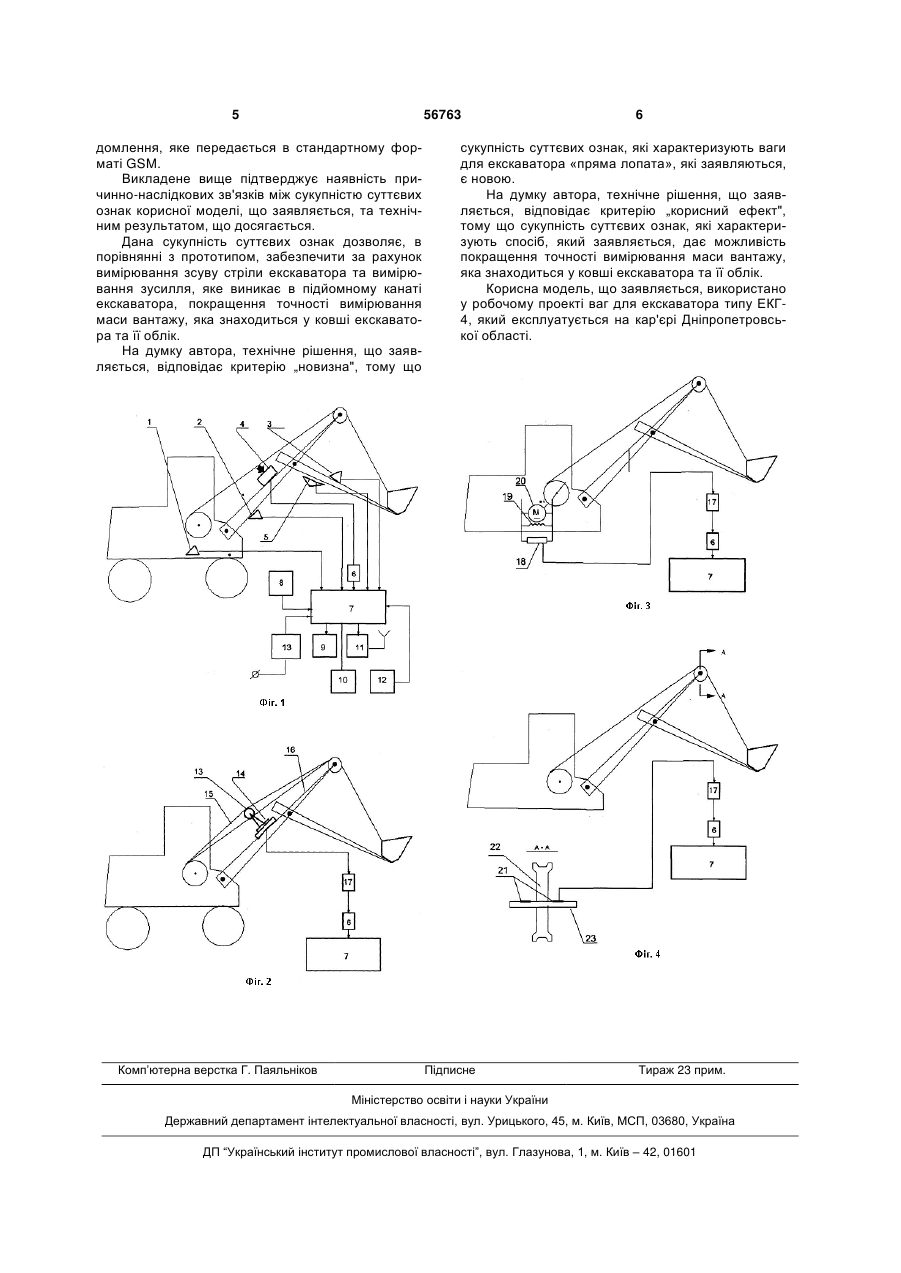
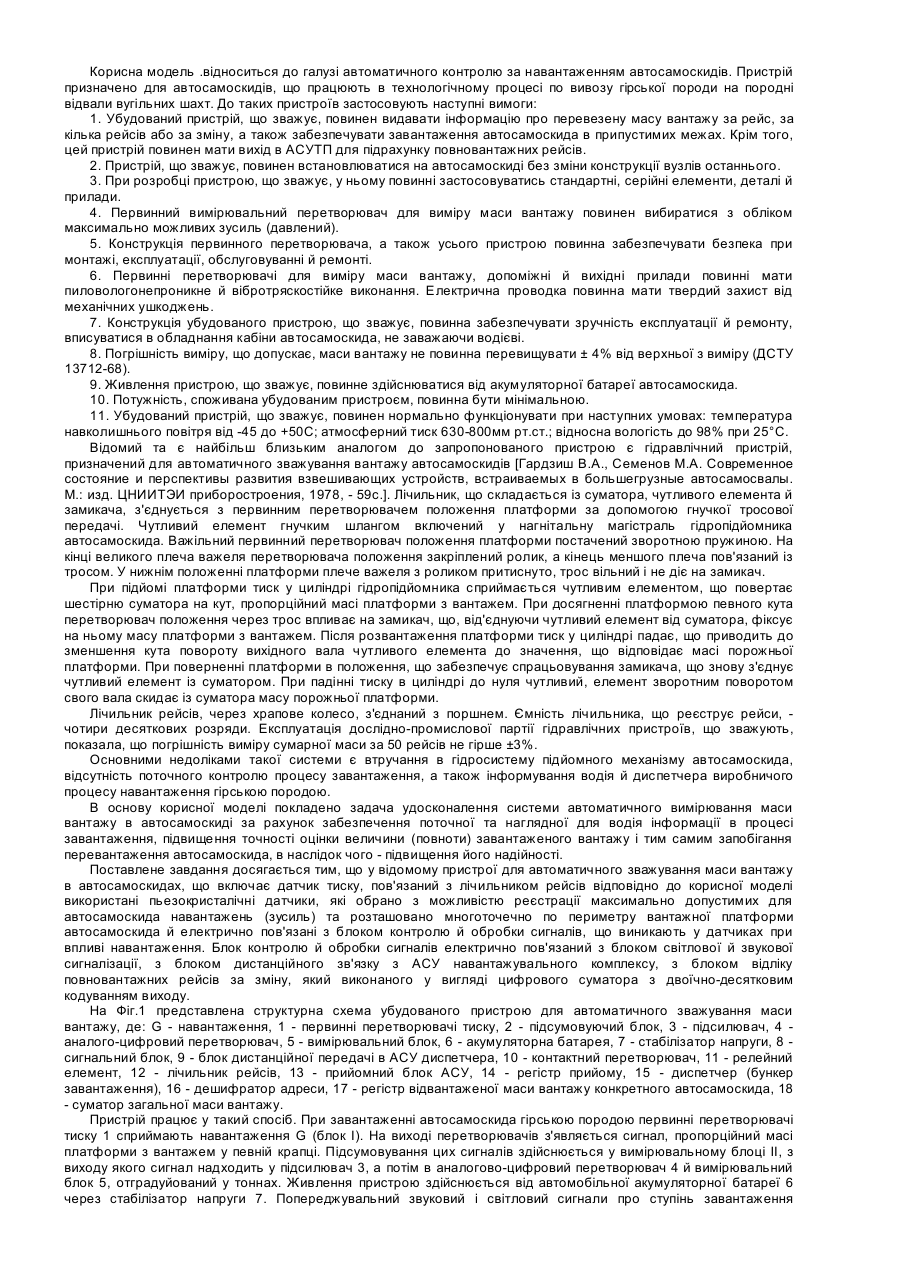
1. Спосіб вимірювання маси вантажу, що підіймає екскаватор "пряма лопата", який передбачає вимірювання кута нахилу корпусу екскаватора, вимірювання кута нахилу стріли екскаватора та вимірювання куту нахилу рукояті екскаватора, який відрізняється тим, що з метою покращення точ 3 ють зусилля, яке виникає в підйомному канаті екскаватора та величину зсуву стріли екскаватора, при цьому розрахунок маси вантажу виконують з урахуванням результатів виміру зусилля, яке виникає в підйомному канаті екскаватора та величини зсуву стріли екскаватора. Новизна способу полягає також в тому, що для виміру зусилля, яке виникає в підйомному канаті екскаватора, можуть використовуватися як відхиляючі ролики, які спираються на датчики зусилля, так і датчики току у обмотці двигуна екскаватора, а також тензопертворювачі, які встановлюються на осі шківа головного канату екскаватора. Порівняльний аналіз технічного рішення, що заявляється, з іншими, відомими із науковотехнічної та патентної літератури, дозволяє виявить ознаки, які відрізнять рішення, що заявляють, від прототипу, що дає можливість автору зробити висновок про відповідність заявлених ознак критерію «суттєві відміни», які визначають новину корисної моделі. На фіг. 1 показана структурна схема пристрою, який реалізує спосіб, що пропонується. На фіг.2 показаний пристрій для виміру зусилля в канаті у вигляді відхиляючого ролика, який встановлюється на стрілі екскаватора . На фіг. 3 показаний пристрій для виміру зусилля в канаті у вигляді датчику току, який встановлений у обмотці двигуна екскаватора. На фіг. 4 показаний пристрій для виміру зусилля в канаті у вигляді тензоперетворювачів, які встановлюються на ось шківа головного канату екскаватора. Спосіб вимірювання маси вантажу, що підіймає екскаватор «пряма лопата», передбачає установлення на екскаваторі датчика 1 кута нахилу корпусу екскаватора, датчика 2 куту нахилу стріли екскаватора, датчика 3 кута нахилу рукояті екскаватора, силовимірювального модуля 4, датчика 5 зсуву рукояті екскаватора, аналого-цифрового перетворювача 6, процесорного блока 7, клавіатури 8, монітора 9, принтера 10, електронного інтерфейсу 11 для передачі вагових даних по радіоканалу або по каналу GSM, кнопки 12 заліку порції. При застосуванні у якості силовимірювального модулю пристрою у вигляді відхиляючих роликів 13, які спираються на датчики зусилля 14, цей ролик встановлюється між головним канатом 15 екскаватора та самою стрілою 16 екскаватора таким чином, щоб на нього діяла сила, яка натискає на тензодатчики 14, що встановлені між головним канатом 15 та стрілою 16. Сигнал з виходу тензодатчиків подається на підсилювач 17 і, далі, на аналого-цифровий перетворювач 6. При застосуванні у якості силовимірювального модулю пристрою у вигляді датчику току у обмотці двигуна екскаватора цей датчик встановлюється, наприклад, в якості шунта 18 у цепі обмотки 19 збудження двигуна 20 екскаватора. Напруга з цього шунта 18 подається на підсилювач 17 і, далі, на аналого-цифровий перетворювач 6. При застосуванні у якості силовимірювального модулю пристрою у вигляді тензоперетворювачів 21, які встановлюються у шків 22 головного канату екскаватора, ці перетворювачі встановлюється, наприклад, на ось 23 шківа 22 головного канату. 56763 4 Сигнал з цих тензоперетворювачів 21 подається на підсилювач 17 і, далі, на аналого-цифровий перетворювач 6. Незалежно від того, який вигляд має силовимірювальний модуль для визначання зусилля у головному канаті, пристрій працює таким чином. Силовимірювальний модуль 4 видає електричний сигнал, який пропорційний масі вантажу у ковші екскаватора. Цей сигнал поступає на аналого-цифровий перетворювач 6, який перетворює його в цифровий код, що по паралельних шинах поступає в процесорний блок 7. Після захвата ковшем екскаватора деякої порції вантажу рукоять екскаватора повертається навколо своєї вісі 24 повороту та пересувається вздовж своєї поздовжній вісі. Величина зсуву вздовж поздовжньої вісі вимірюється датчиком 5 зсуву рукояті екскаватора, а величина куту нахилу рукояті вимірюється датчиком 3 куту нахилу рукояті екскаватора. В подальшому існує два варіанти реалізації алгоритму спрацювання ваг. В першому варіанті процесорний блок 7 дає команду на вимірювання сигналів, які поступають від аналого-цифрового перетворювача 6, в той момент, коли рукоять екскаватора опиняється в положенні, яке задається при настройці. В другому варіанті процесорний блок 7 дає команду на вимірювання сигналів, які поступають від аналого-цифрового перетворювача 6 в той момент, коли кут нахилу рукояті екскаватора опиняється в положенні, яке задається при настройці. І в першому і в другому випадках процесорний блок 7 рахує масу вантажу, який знаходиться в ковші екскаватора по формулі, яка зв'язує між собою геометричні параметри елементів конструкції екскаватора та величину сигналу, які поступають від аналого-цифрового перетворювача 6 з величиною куту нахилу рукояті та величиною зсуву рукояті екскаватора. Перед початком роботи виконується тарування - при цьому заповнюється матриця ТАРА, яка зберігається в пам'яті мікропроцесорного блоку 7 та в кожній своєї клітині має значення маси порожнього ковшу, яке відповідає відповідному куту нахилу рукояті та відповідному значенню величини зсуву рукояті. В подальшому маса ковша «тара», яка відповідає даному положенню ковша, кожен раз відіймається від маси ковша «брутто» і таким чином підраховується маса ковша «нетто». На початку завантаження кожної порції оператор за допомогою клавіатури 8 вводить значення порції, яке запам'ятовується в пам'яті мікропроцесорного блоку. Кожен раз, коли здійснюється зважування маси вантажу в ковші, на моніторі 9 показується маса ковша «нетто», а при спрацюванні кнопки 12 заліку порції ця маса «нетто» зараховується до сумарної відвантаженої маси, яка також показується на моніторі 9. По завершенню циклу завантаження заданої оператором порції ці показники вертаються на нуль і процес відшкодування суми відвантаженої маси починається з початку. По команді від процесорного блоку 7 інформація про результат зважування передається на електронний інтерфейс 11, який перетворює її в пові 5 56763 домлення, яке передається в стандартному форматі GSM. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак корисної моделі, що заявляється, та технічним результатом, що досягається. Дана сукупність суттєвих ознак дозволяє, в порівнянні з прототипом, забезпечити за рахунок вимірювання зсуву стріли екскаватора та вимірювання зусилля, яке виникає в підйомному канаті екскаватора, покращення точності вимірювання маси вантажу, яка знаходиться у ковші екскаватора та її облік. На думку автора, технічне рішення, що заявляється, відповідає критерію „новизна", тому що Комп’ютерна верстка Г. Паяльніков 6 сукупність суттєвих ознак, які характеризують ваги для екскаватора «пряма лопата», які заявляються, є новою. На думку автора, технічне рішення, що заявляється, відповідає критерію „корисний ефект", тому що сукупність суттєвих ознак, які характеризують спосіб, який заявляється, дає можливість покращення точності вимірювання маси вантажу, яка знаходиться у ковші екскаватора та її облік. Корисна модель, що заявляється, використано у робочому проекті ваг для екскаватора типу ЕКГ4, який експлуатується на кар'єрі Дніпропетровської області. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of mass of load lifted by excavator “shovel attachment”
Автори англійськоюBuhaienko Heorhii Yakovych, Buhaienko Yehor Heorhiiovych, Buhaienko Maksym Heorhiiovych
Назва патенту російськоюСпособ измерения массы груза, который поднимает экскаватор "прямая лопата"
Автори російськоюБугаенко Георгий Яковлевич, Бугаенко Егор Георгиевич, Бугаенко Максим Георгиевич
МПК / Мітки
МПК: G01G 19/00
Мітки: спосіб, вантажу, вимірювання, екскаватор, підіймає, пряма, лопата, маси
Код посилання
<a href="https://ua.patents.su/3-56763-sposib-vimiryuvannya-masi-vantazhu-yakijj-pidijjmaeh-ekskavator-pryama-lopata.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання маси вантажу, який підіймає екскаватор “пряма лопата”</a>
Система автоматичного вимірювання маси вантажу в автосамоскидах
Номер патенту: 31746
Опубліковано: 25.04.2008
Автори: Степанов Олексій Вікторович, Полянський Олександр Сергійович
МПК: G01G 19/08
Мітки: автоматичного, автосамоскидах, маси, вимірювання, система, вантажу
Формула / Реферат:
Система автоматичного вимірювання маси вантажу в автосамоскидах, що включає датчик тиску, пов'язаний з лічильником рейсів, яка відрізняється тим, що використані п'езокристалічні датчики, які вибрано з можливістю реєстрації максимально допустимих для автосамоскида навантажень (зусиль) та розташовано багатоточково по периметру вантажної платформи автосамоскида й електрично пов'язано з блоком контролю й обробки сигналів, що виникають у датчиках...
Пристрій для автоматичного вимірювання маси вантажу на кар’єрних автосамоскидах
Номер патенту: 30873
Опубліковано: 15.12.2000
Автори: Філатов Сергій Валентинович, Горіх Володимир Васильович, Бизов Богдан Володимирович, Безлуцький Юрій Борисович
МПК: G01G 19/02
Мітки: вантажу, вимірювання, кар'єрних, пристрій, маси, автосамоскидах, автоматичного
Текст:
...з обох підсилювачів 2, у свою чергу підживлених від формувача синусного 3 і косинусного 4 сигналів, в якій через RC-фільтр 5 чергуються сигнали опорної частоти з блоком 6. Формувач синусного сигналу 3 також послідовно з'єднаний з блоком формування опорного сигналу 7, з якого сигнали поступають у формувач імпульсів рахування обертів фаз 8, з'єднаних також з виходом резольвера 1. Далі імпульси подаються на емітатор підрахунку, який...
Кар’єрний екскаватор-лопата
Номер патенту: 50897
Опубліковано: 15.11.2002
Автори: Невідомський Володимир Олександрович, Токарєв Олексій Захарович, Грохоткін Валерій Іванович, Калужський Дмитро Юлійович, Хорунжий Володимир Дмитрович, Калашніков Олег Юрієвич
МПК: E02F 3/04
Мітки: кар'єрний, екскаватор-лопата
Формула / Реферат:
1. Кар'єрний екскаватор-лопата, що містить ходові візки з рамою та поворотну платформу, на якій установлені стріла, механізм підйому, зв'язаний канатами з ковшем, установленим на рукояті, шарнірно закріпленій на коливній стійці, з якою взаємодіє напірний механізм, установлений на надбудові, який відрізняється тим, що напірний механізм виконаний у вигляді силового циліндра, а коливна стійка - у вигляді тригранної призми, яка одною гранню...
Спосіб вимірювання ваги вантажу
Номер патенту: 53005
Опубліковано: 15.01.2003
Автори: Шабатура Юрій Васильович, Свирида Віталій Іванович
МПК: G01G 19/08
Мітки: спосіб, вантажу, вимірювання, ваги
Формула / Реферат:
Спосіб вимірювання ваги вантажу в транспортному засобі на пневматичному ходу, який полягає у визначенні частотної характеристики, за якою складають математичну модель транспортного засобу, який відрізняється тим, що додатково визначають частотну характеристику й температуру кожної шини транспортного засобу, а також значення атмосферного тиску до і після завантаження, і за результатами цих вимірювань по математичній моделі транспортного...
Пристрій автоматичного визначення маси вантажу у вагоні в статиці на одноплатформних вагах
Номер патенту: 32551
Опубліковано: 26.05.2008
Автори: Поповкін Юрій Матвійович, Войтович Олександр Володимирович, Дегтярик Микола Володимирович
МПК: G01G 15/00
Мітки: одноплатформних, вантажу, пристрій, маси, автоматичного, вагони, вагах, статиці, визначення
Формула / Реферат:
Пристрій автоматичного визначення маси вантажу у вагоні в статиці на одноплатформних вагах, що містять тензодатчики, аналого-цифрові перетворювачі, який відрізняється тим, що складається з генератора імпульсів, з'єднаного із другим входом першої логічної схеми І, перший вхід якого підключений до виходу тригера пам'яті, а вихід через перемикач Пр1 з'єднаний з одним із входів лічильника, а вихід підключений до входу п'ятого дешифратора Д,...
Попередній патент: Пристрій для передачі інформації біологічному об’єкту
Наступний патент: Спосіб вимірювання коефіцієнта поляризації біологічних тканин
Випадковий патент: Спосіб черезкісткового остеосинтезу та пристрій для його здійснення