Пристрій і спосіб неруйнівного контролю металевих профілів
Формула / Реферат
1. Пристрій контролю металургійних виробів такого типу, що включає в себе:
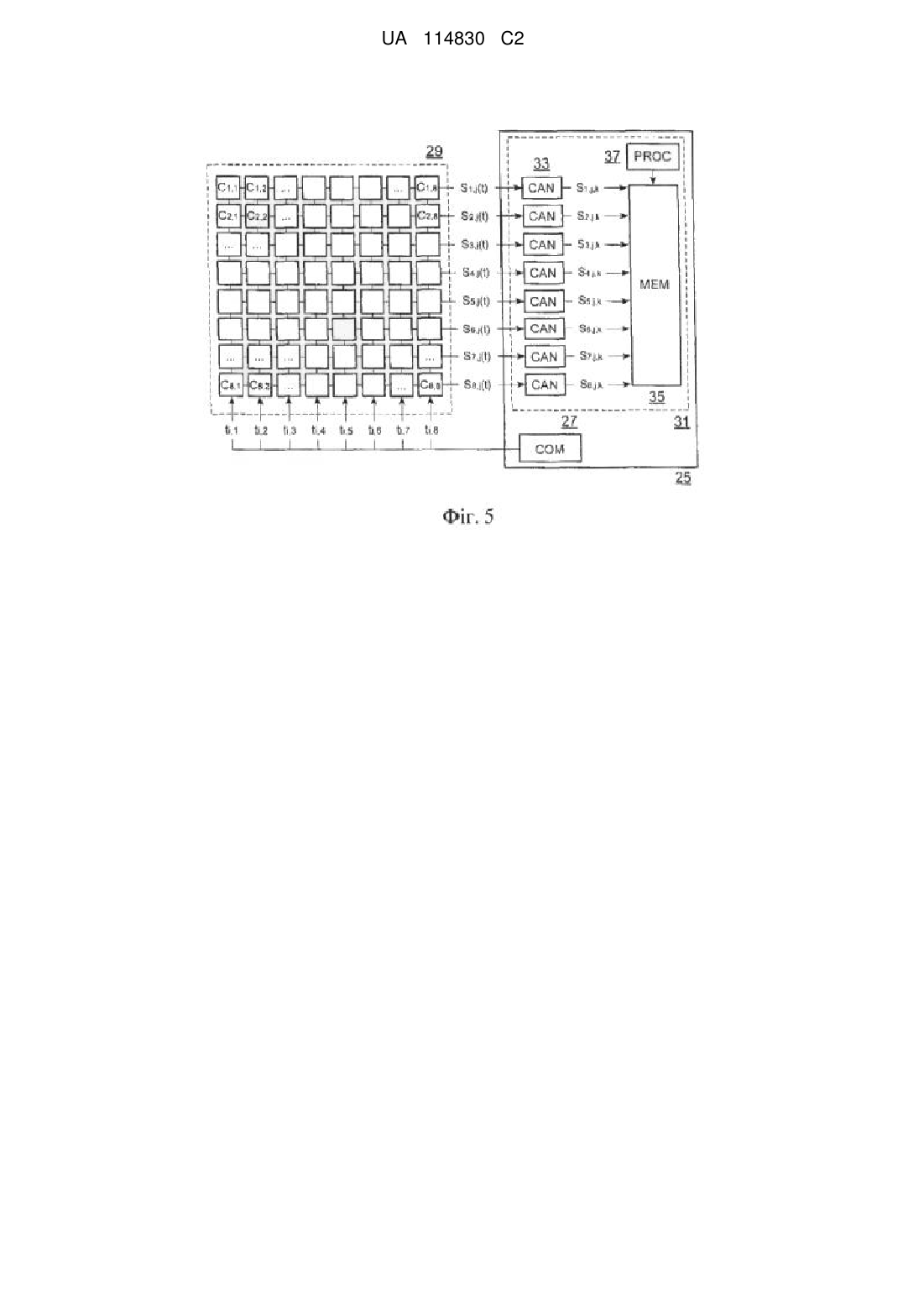
- ультразвуковий датчик (5;7;С), який включає в себе множину елементарних перетворювачів (9), що працюють незалежно один від одного і розподілені згідно зі схемою (41) в двох вимірюваннях;
- першу електроніку (27), здатну збуджувати кожен з елементарних перетворювачів згідно зі щонайменше одним часовим законом, відповідним пуску ультразвукових хвиль в прицільному напрямку;
- другу електроніку (31), здатну обробляти щонайменше частину сигналів, захоплених кожним з елементарних перетворювачів;
який відрізняється тим, що кожен часовий закон встановлений так, що відповідний пуск виробляє пучок ультразвукових хвиль, який звичайно розходиться навколо прицільного напрямку, віддаляючись від ультразвукового датчика.
2. Пристрій за п. 1, в якому кожен часовий закон містить щонайменше один часовий підзакон для збудження щонайменше однієї відповідної підмножини елементарних перетворювачів (9).
3. Пристрій за п. 2, в якому кожна підмножина елементарних перетворювачів відповідає відповідній ділянці схеми (41).
4. Пристрій за п. 3, в якому вказані ділянки схеми відповідають в їх сукупності розділенню згаданої схеми.
5. Пристрій за будь-яким з пп. 2-4, в якому кожен підзакон влаштований так, що збудження елементарних перетворювачів (9) відповідної підмножини виробляє первинний пучок ультразвукових хвиль, і згаданий пучок ультразвукових хвиль, що звичайно розходиться, одержаний з відповідних первинних пучків ультразвукових хвиль підмножин елементарних перетворювачів (9).
6. Пристрій за будь-яким з попередніх пунктів, в якому кожен часовий закон влаштований так, що відповідне збудження елементарних перетворювачів (9) виробляє один або декілька первинних пучків, і згаданий пучок ультразвукових хвиль, що звичайно розходиться, одержаний з первинного пучка або первинних пучків ультразвукових хвиль.
7. Пристрій за п. 6, в якому кожен первинний пучок поширюється вздовж відповідного напрямку, який розходиться від прицільного напрямку, віддаляючись від ультразвукового датчика.
8. Пристрій за будь-яким з пп. 6-7, в якому кожен первинний пучок по суті позбавлений фокусування.
9. Пристрій за будь-яким з пп. 6-7, в якому кожен первинний пучок розфокусований в прицільному напрямку.
10. Пристрій за будь-яким з пп. 6-7, в якому кожен часовий закон влаштований так, що відповідне збудження елементарних перетворювачів (9) виробляє єдиний первинний пучок ультразвукових хвиль, розфокусований в прицільному напрямку.
11. Пристрій за будь-яким з пп. 6-10, в якому первинні пучки зустрічають цільову поверхню, відповідну прицільному напрямку у відповідних областях проникнення цієї поверхні, які є суміжними одна з одною.
12. Пристрій за будь-яким з попередніх пунктів, в якому первинні пучки поширюються вздовж відповідних напрямків, по суті нахилених на один і той же кут з одного і з іншого боку від прицільного напрямку.
13. Пристрій за будь-яким з попередніх пунктів, в якому кожен прицільний напрямок відповідає відповідному переважному напрямку схеми.
14. Пристрій за п. 13, в якому кожен переважний напрямок відповідає осі симетрії схеми.
15. Пристрій за будь-яким з попередніх пунктів, в якому схема відповідає таблиці квадратної або прямокутної форми.
16. Пристрій за будь-яким з попередніх пунктів, в якому множина елементарних перетворювачів розподілена по активній поверхні ультразвукового датчика, і кожен прицільний напрямок нахилений відносно напрямку, перпендикулярного до активної поверхні в центральному положенні схеми.
17. Пристрій за будь-яким з пп. 1-16, в якому множина елементарних перетворювачів розподілена на активній поверхні ультразвукового датчика, і прицільний напрямок є перпендикулярним до активної поверхні, щонайменше в центральному положенні схеми.
18. Пристрій за п. 4, в якому розділення схеми відповідає осям симетрії цієї схеми, які відповідають прицільному напрямку.
19. Пристрій за будь-яким з попередніх пунктів, в якому щонайменше деякі з часових законів містять підзакони, ідентичні для одночасного збудження елементарних перетворювачів, розташованих у взаємній симетрії відносно переважного напрямку схеми.
20. Пристрій за будь-яким з попередніх пунктів, в якому прицільні напрямки нахилені один відносно іншого, по суті, ідентичним чином.
21. Спосіб контролю металургійних виробів, що включає в себе наступні етапи:
A) передбачають ультразвуковий датчик (5;7;С), що включає в себе множину елементарних перетворювачів (9), що працюють незалежно один від одного і розподілені згідно зі схемою (41) у двох вимірюваннях;
B) збуджують кожен з елементарних перетворювачів для виробництва пуску ультразвукових хвиль відповідного пучка, що звичайно розходиться навколо прицільного напрямку, віддаляючись від ультразвукового датчика;
C) обробляють щонайменше частину сигналів, захоплених кожним з елементарних перетворювачів у відповідь на ультразвуковий пуск.
Текст
Реферат: Пристрій контролю металургійних виробів типу, що включає ультразвуковий датчик, який включає в себе множину елементарних перетворювачів (29), які працюють незалежно один від одного і розподілені згідно зі схемою в двох вимірюваннях. Перша електроніка (27) здатна збуджувати кожен з елементарних перетворювачів згідно зі щонайменше одним часовим законом відповідним пуску ультразвукових хвиль в прицільному напрямку. Друга електроніка (31) здатна обробляти щонайменше частину сигналів, захоплених кожним з елементарних перетворювачів. Кожен часовий закон встановлений так, що відповідний пуск виробляє пучок ультразвукових хвиль, який звичайно розходиться навколо прицільного напрямку, віддаляючись від ультразвукового датчика. Відповідний спосіб контролю. UA 114830 C2 (12) UA 114830 C2 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід стосується сфери неруйнівного контролю металургійних виробів, зокрема профілів значної довжини, як правило, від декількох метрів до декількох десятків метрів. Щоб краще зрозуміти винахід, винахід буде описаний в контексті виробів головним чином трубчастих, зокрема труб, як прикладів металургійних виробів. Проте, винахід призначений, щоб застосовуватися більш широко. Труби великої довжини широко використовуються. Як прикладні області, можна відмітити, наприклад, виробництво електроенергії, де використовуються труби, що називається "казанами", також відомі від англійського еквівалента "boilers", нафти і газу, де використовуються труби для буріння, видобування і транспортування ("трубопроводи") або ще машинобудування, чи то в цивільному будівництві, чи в галузях автомобілебудування і повітроплавання. Як більшість металургійних виробів, труби можуть мати дефекти, пов'язані з їх виготовленням, такі як, наприклад, включення речовини в сталь або відсутність речовини. Як правило, будь-яка неоднорідність в сталевій матриці розглядається як дефект, який може привести до погіршення механічної міцності труби в процесі експлуатації. Ось чому контролюють металеві труби віразу після їх виготовлення, не тільки для того, щоб виявити можливі дефекти, але і, якщо потрібно, щоб визначити інформацію, корисну для розрахунку ступеня небезпеки цих дефектів, зокрема розмір, глибину, положення, характер або орієнтацію. При виготовленні партії труб, бажано контролювати більшість, і якомога більш вірно. Деякі гравці в галузі, такі як Заявник, перевіряють кожну зроблену трубу окремо. Контроль труб представляє етап виготовлення, також як більш традиційні етапи, зокрема надання форми. Оскільки вони впливають на темп виробництва, здійснювані способи контролю повинні бути економічними, швидкими, залишаючись надійними. Також шукають практичні автоматичні способи контролю. Зокрема використовують техніки контролю, які використовують ультразвукові хвилі. Випускають ультразвукові хвилі і вивчають луна-сигнали, що виходять в результаті, в пошуках тих, що не можуть бути віднесені до геометрії труби. Включення або відсутність речовини утворюють варіації в середовищі поширення хвилі, і тим самим генерують луна-сигнали, коли вони вражаються ультразвуковими хвилями. Інтенсивність відбитого сигналу, викликаного дефектом, залежить від кута, під яким хвиля ударяє його. Для спрямування поширення ультразвукової хвилі - в трубі, в основному, будуть виявлені відповідно орієнтовані дефекти, тобто перпендикулярно до напрямку поширення, однак з деяким допуском, близько одного або двох градусів. На практиці, дефекти не є чисто подовжніми або поперечними, але повертають більш або менш значний відбитий сигнал в одному або іншому з цих напрямків. Наприклад, подовжнім дефектом називають дефект, який генерує у відповідь на пуск відповідного напрямку відбитий сигнал, що перевищує визначене порогове значення. Цей поріг встановлюється калібруванням за допомогою позиційних пазів (глибини і орієнтації) і нормалізованих розмірів. Орієнтація дефекту може бути прирівняна до його більшої поверхні відображення. Тривалість контролю залежить в основному від часу, необхідного для шляху ультразвукових хвиль в трубі, туди і назад, і, в деякій мірі, від часу обробки захоплених зворотних сигналів. Щоб погодити вимоги до продуктивності і безпеки, звикли обмежувати кількість ультразвукових пусків і шукати тільки дефекти, орієнтовані згідно з деякими визначеними кутами. Звичайно, намагаються виявити дефекти, чий нахил найбільш поширений, як правило, дефекти орієнтовані паралельно до твірної труби. Останні розробки в техніці спрямовані на способи контролю що дозволяють крім того виявлення дефектів різних орієнтацій, обмежуючи кількість пусків для збереження прийнятної швидкості перевірки. З US 5.473.943 відомий пристрій контролю за допомогою ультразвукових хвиль, що включає дев'ять ультразвукових датчиків, або перетворювачів, розподілених навколо труби, що перевіряється. Такий пристрій дозволяє виявити дефекти орієнтовані в дев'яти різних напрямках один від одного. Кількість напрямків, які можуть бути під контролем, залишається обмеженою кількістю датчиків. Крім того, цей пристрій дозволяє перевіряти тільки мало протяжну область труби, що передбачає дуже повільне просування труби відносно датчиків або збільшення кількості датчиків. Низька швидкість просування несумісна з вимогами виробництва, в той час як збільшення кількості датчиків створює проблеми вартості і налаштування. 1 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 Деякі недавні розробки використовують ультразвукові датчики, що називаються "фазованою решіткою"("phased array") або "у вигляді решітки і керовані послідовно" на французькій мові, які також називаються "багатоелементні лінійні перетворювачі". Ці датчики включають в себе множину електроакустичних перетворювачів, у вигляді п'єзоелектричних елементів, розподілених на активній поверхні датчика, відповідно до основного напрямку. Наприклад, ці перетворювачі можуть бути розташовані на одній лінії один з одним і утворювати те, що іноді називають "планкою перетворювачів". Датчики, що мають такий розподіл, називають "з одним вимірюванням". Перетворювачі збуджуються один за іншим, послідовно, так, щоб скомбінувати ультразвукові хвилі, вироблені таким чином для формування пучка відхилених хвиль, при необхідності сфокусовані (точка фокусування попереду датчика), що дозволяє перевірити трубу на існування дефектів орієнтованих у відповідному напрямку. Також відомий пристрій контролю за допомогою ультразвукових хвиль, що включає в себе датчик типу "фазованої решітки" з одним вимірюванням, елементарні перетворювачі якого розташовані навколо контрольованої труби. Такий пристрій дозволяє виявляти несправності майже всіх кутів нахилу, але тільки в невеликому відрізку труби. Оскільки тільки область дуже невеликої протяжності може бути перевірена в один час, операція вимагає невеликої швидкості подачі труби. Це приводить до дуже значного часу перевірки, щоб могло бути розглянуте промислове застосування. Крім того, пристрій, що розглядається вимагає інший датчик по діаметру труби, що перевіряється. Відомо з WO2003/50527 установка неруйнівного контролю для металургійних виробів, в якій використовується датчик типу "фазованої решітки" з одним вимірюванням. Кожен елемент датчика збуджується один раз, потім контур обробки аналізує глобальну відповідь труби на цю єдину передачу, що називається "пуск" в даній галузі. На основі пуску, здійсненого в поперечному напрямку труби, можна визначити присутність не тільки дефектів, розташованих перпендикулярно до цього напрямку, але і дефекти, що мають нахил відносно цього перпендикулярного до напрямку між плюс і мінус 10°. На практиці використовують три датчики: два датчики призначених для виявлення подовжньо орієнтованих дефектів або з нахилом відносно цього подовжнього напрямку, розташованого між плюс і мінус 20°, і додатковий датчик для виявлення дефектів, орієнтованих в поперечному напрямку відносно труби і/або вимірювання товщини цієї труби. Установка, що розглядається, загалом є задовільною. Вона дозволяє контролювати трубу на наявність дефектів орієнтованих в обмеженій кількості напрямків. Для контролю труби на наявність дефектів що мають будь-яку орієнтацію, треба збільшити кількість датчиків або неодноразово змінювати орієнтацію датчиків відносно труби, кожен раз, щоб прицілитися в іншому напрямку. Заявник прагне поліпшити існуюче. Запропонований пристрій контролю металургійних виробів стосується типу, що включає в себе ультразвуковий датчик, що включає в себе множину елементарних перетворювачів, що працюють незалежно один від одного і розподілені згідно з схемою в двох вимірюваннях, першу електроніку здатну збуджувати кожен з елементарних перетворювачів згідно з щонайменше часовим законом, відповідним пуску ультразвукових хвиль в прицільному напрямку, і другу електроніку здатну обробляти щонайменше частину сигналів, захоплених кожним з елементарних перетворювачів. Кожен часовий закон встановлений так, що відповідний пуск проводить пучок ультразвукових хвиль, щозвичайно розходяться навколо прицільного напрямку, віддаляючись від ультразвукового датчика. Запропонований спосіб контролю металургійних виробів включає в себе передбачення ультразвукового датчика, що включає в себе множину елементарних перетворювачів, що працюють незалежно один від одного і розподілені по схемі в двох вимірюваннях, збудження кожного з елементарних перетворювачів для виробництва пуску ультразвукових хвиль, що відповідає пучку, який звичайно розходиться навколо прицільного напрямку, віддаляючись від ультразвукового датчика, і обробку щонайменше частини сигналів, захоплених кожним з елементарних перетворювачів у відповідь на ультразвуковий пуск. На відміну від звичайних способів і пристроїв, які прагнуть відхилити і сфокусувати пучок ультразвукових хвиль у прицільному напрямку контролю, запропонований пристрій випромінює пучок ультразвукових хвиль, які розходяться навколо прицільного напрямку. Для пуску, націленого у визначеному напрямку, більш протяжна область труби виявляється покритою ультразвуковими хвилями в результаті цього пуску. Ця більш протяжна область "опромінення ультразвуком" дозволяє виявити дефекти, які мають більший нахил відносно прицільного напрямку, ніж в звичайних пристроях. 2 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 Запропонований пристрій дозволяє виявляти дефекти будь-якого нахилу за допомогою єдиного датчика, що збуджує обмежену кількість разів, зберігаючи при цьому хорошу швидкість контролю. Зокрема, є можливість виявити за допомогою єдиного датчика і обмеженої кількості пусків, поперечні дефекти, які також називаються "обводовими", тобто дефекти, які проходять перпендикулярно до твірної труби, і подовжні дефекти, які проходять вздовж вказаної твірної, і дефекти, які утворюють будь-який кут з твірної контрольованої труби. Виграш в продуктивності і надійності очевидний. Інші характеристики і переваги винаходу виявляться при розгляді наведеного нижче докладного опису і прикладених креслень, на яких: - фіг. 1 схематично показує пристрій неруйнівного контролю для труби, у вигляді спереду; - фіг. 2 показує пристрій фіг. 1 у вигляді збоку; - фіг. 3 показує електроакустичний датчик для використання в пристрої за фіг. 1, у вигляді спереду; - фіг. 4 показує датчик, показаний на фіг. 3, в поперечному перерізі вздовж лінії IV-IV; - фіг. 5 показує функціональну схему електроніки керування і обробки для електроакустичного датчика з фіг. 3; - фіг. 6А показує схему, що ілюструє напрямок пуску для ультразвукового пучка в просторі; - фіг. 6B показує схему, що ілюструє множину елементарних перетворювачів (2); - фігури 7A і 7B відповідно показують першу і другу таблицю затримок для матричного багатоелементного електроакустичного датчика; - фіг. 8 показує вигляд у перспективі таблицю елементарних перетворювачів (2), в робочому положенні відносно контрольованої труби, і стовбчасту діаграму, що показує значення затримки, що застосовується до цих перетворювачів (2) для подовжнього пуску відповідно до першого варіанта першого виду реалізації даного винаходу; - фіг. 9А показує окремо таблицю і діаграму з фіг. 8, вигляд у перспективі; - фіг. 10А показує стовбчасту діаграму з фіг. 9А, вигляд збоку; - фіг. 11A показує стовбчасту діаграму з фіг. 9А, вигляд спереду; - фіг. 12 аналогічна фіг. 8 для поперечного пуску; - фіг. 13А аналогічна фіг. 8 для похилого пуску; - Фіг. 14 показує таблицю і діаграму фіг. 13A вигляд у перспективі під іншим кутом; - фігури 9B, 10B, 11B і 13B відповідно аналогічні фіг. 9A, 10А, 11А і 13А для другого варіанта першого виду реалізації; - фіг. 15 і 16 аналогічні фіг. 7А і 7В для різних умов збудження; - фіг. 17, 18А і 18В показують схеми, які називаються "опромінення ультразвуком" для еталонного пристрою, пристрій відповідно до першого виду здійснення даного винаходу, і пристрій згідно з другим видом здійснення даного винаходу, відповідно; - додаток А.1 показує, у вигляді таблиць, значення затримки, відповідні першому варіанту першого виду здійснення даного винаходу; - додаток А.2 показує, в таблицях, значення затримки, відповідні другому варіанту першого виду здійснення даного винаходу; - додаток А.3 показує, в табличній формі, закони транспозиції значень затримки для різних напрямків пусків; - додаток А.4 показує, в таблицях, значення затримки, відповідні другому виду здійснення даного винаходу; - додаток А.5 є матрицею адресації елементарних перетворювачів (2) електроакустичного датчика. Креслення і додатки включають в себе деякі елементи характерних рис. Таким чином, вони можуть не тільки служити для опису винаходу, але і для його визначення, якщо це необхідно. Посилання робиться на фігури 1 і 2. Установка контролю за допомогою ультразвукових хвиль містить раму 1, що підтримує коонтрольовану металеву трубу 3 і ультразвуковий датчик 5, прикладений навпроти периферичної поверхні труби 3 і з'єднаний з електронним блоком 6 керування і обробки. Ультразвуковий датчик 5 іноді називають "перетворювачем" в даній галузі техніки. Для контролю, датчик 5 і труба 3 переміщуються відносно гелікоїдально. Тут труба 3 переміщується відносно рами 1 відповідно до спірального руху навколо осі, відповідної її подовжній осі, в той час як датчик 5 утримується в положенні відносно рами 1. Рама 1 може бути забезпечена поворотними роликами, нахиленими відносно подовжньої осі труби 3. Як альтернатива, труба 3 може приводитися в рух з обертальним рухом тільки відносно рами 1, в той час як датчик 5 ковзає в подовжньому напрямку рами 1. Датчик 5 може бути 3 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 встановлений на візку пересувному відносно рами 1. Згідно з ще одним варіантом, датчик 5 може обертатися навколо труби 3, в той час як остання зсувається відносно рами 1. Спіральне відносне переміщення між датчиком 5 і трубою 3 дозволяє контролювати всю трубу 3 за допомогою датчика 5 зменшеного обхвату відносно кола труби 3. Можливо було б як заміна передбачити більшу кількість датчиків, розташованих у вигляді кільця навколо труби 3, і забезпечити послідовність пусків, яка гарантує покриття, коли труба 3 ковзає відносно датчика 5. З'єднувальне середовище, або контактна рідина, наприклад, у вигляді гелю, може бути введена між датчиком 5 і периферійною поверхнею труби 3. Крім того, установка може містити корпус, заповнений водою, або іншим рідким з'єднувальним середовищем, в яке завантажені труба 3 і датчик 5. Посилання робиться на фігури 3 і 4. Вони демонструють датчик 7, типу, який називається "мозаїка", який може бути використаний як датчик 5 в установці, показаній на фіг. 1 і 2. Мозаїчні датчики іноді називають "багатоелементні перетворювачі" в даній галузі техніки. Датчик 7 включає в себе множину стрижнів 9 з п'єзоелектричного матеріалу, тут рівномірно розподілених згідно із зображенням в таблиці ("array (масив)" англійською). Як показано, датчик 7, відповідний тому, що звичайно називають "багатоелементний матричний перетворювач" в даній галузі. Стрижні 9 утоплені в матрицю 11 з електрично інертного полімерного матеріалу. Стрижні 9 електрично і акустично незалежні один від одного. Кожен стрижень 9 може бути індивідуально збуджений для генерації ультразвукових імпульсів, без того, щоб ці імпульси зачіпали сусідні стрижні 9. Кожен стрижень 9, таким чином, утворює елементарний перетворювач, який може працювати незалежно від інших стрижнів 9. Датчик 7 має випромінювальну поверхню, яка не виготовлена з однорідного і масивного п'єзоелектричного матеріалу, на відміну від звичайних датчиків. Замість цього, випромінювальна поверхня датчика 7 виготовлена з композитного матеріалу, що містить полімерну матрицю і множину елементів з п'єзоелектричного матеріалу. Датчик 7 тут включає шістдесят чотири стрижні 9 рівномірно розподілених в формі квадрата з восьми стрижнів 9 на сторону. Кожен стрижень 9 тут має квадратний профіль, чия сторона менша 1 мм і більша 0,1 мм. Відхилення становить близько однієї десятої міліметра на сторонах порівняно з суміжними стрижнями 9. Квадратна форма є усього лише одним прикладом двомірної форми. Скажемо, що багатоелементний датчик має форму в двох вимірюваннях, коли його елементарні перетворювача розділені згідно з двома різними напрямками один від одного на активній поверхні датчика, який використовується для передачі і прийому ультразвукових хвиль. У більш загальному випадку винахід може бути реалізований з будь-якою двомірною схемою. Кожен стрижень 9 прикріплений до електричного кабелю 13, який є його власним і який його з'єднує з електронним блоком керування і обробки. Електричні кабелі 13 згруповані в оболонці, представленій блоком позначеним 15 на фіг. 4. Датчик 7 включає в себе корпус 17, до якого прикріплена оболонка 15 і який вміщує стрижні 9. Корпус 17 закритий адаптаційним шаром 19, що контактує з активною поверхнею кожного зі стрижнів 9. Стрижні 9 знаходяться в контакті з металевою пластиною 21 через поверхню, протилежну до їх поверхні, що контактує з адаптаційним шаром 19 для реалізації заземлення. Простір, який залишається вільним в корпусі 17, заповнюється прокладкою 23. Фіг. 5 демонструє приклад робочої електроніки 25 ультразвукового датчика, який може бути типу датчика 7, описаного вище. Робоча електроніка 25 включає в себе ланцюг 27 збудження окремо приєднаний до кожного з елементарних перетворювачів 29 датчика, що розглядається. Тут, елементарні перетворювачі 29 розподілені згідно зі схемою, відповідною таблиці квадратної форми з вісьмома перетворювачами на сторону. На фіг. 5, елементарний перетворювач Ci, j визначається його положенням в таблиці (рядок i, стовпчик j). З метою спрощення креслення, ланцюг 27 збудження з фіг. 5 в кожному випадку, пов'язаний тільки з одним елементарним перетворювачем Ci, j, тільки в кожному стовпчику. На практиці, ланцюг 27 збудження з'єднаний з кожним елементарним перетворювачем Ci, j індивідуально. Робоча електроніка 25 ще включає в себе приймаючий ланцюг 31, здатний записувати і обробляти сигнали від хвиль спійманих елементарними перетворювачами 29. Кожен елементарний перетворювач Ci, j індивідуально з'єднаний з відповідним аналого/цифровим перетворювачем 33, який дискретизує вихідний сигнал Si, j(t), перетворювача Ci, j, що 4 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 розглядається, і забезпечує пам'ять 35 цифровим уявленням Si, j,k одержаним таким чином щонайменше протягом заданого періоду часу. Вміст пам'яті 35 може бути оброблений за допомогою обчислювального блока 37, наприклад, мікрокомп'ютера. З метою спрощення креслення, аналогово/цифровий перетворювач 33 з фіг. 5, в кожному випадку, пов'язаний з одним п'єзоелектричним елементом Ci, j, лише кожного рядка. На практиці, кожен аналогово/цифровий перетворювач 33 пов'язаний з всіма елементарними перетворювачами Ci, j його рядка, індивідуально. Елементарні перетворювачі 29 збуджуються індивідуально і послідовно. "Пуском" називають процес, який полягає у випромінюванні серії імпульсів кожним елементарним перетворювачем Ci, j. Пуск відповідає здійсненню часового закону збудження, який визначає, для кожного елементарного перетворювача Ci, j, відповідну затримку ti, j, відносно еталона часу, загального для всіх елементарних перетворювач Ci, j. Таким чином збуджені, елементарні перетворювачі спільно виробляють пучок ультразвукових хвиль. Закон збудження розраховується, щоб націлитися на конкретний напрямок, що передбачає, що елементарні перетворювачі 29 разом виробляють пучок ультразвукових хвиль, що поширюються в цьому конкретному напрямку, або напрямку пуску. Відповідно до першого виду здійснення винаходу, напрямок пуску нахилений відносно нормалі до головної площини активної поверхні датчика, коли остання є плоскою, або до центральної зони цієї поверхні, коли вона зігнута. Пучок ультразвукових хвиль можна розглядати як відбитий пучок. Цей пучок розходиться навколо цільового напрямку. Згідно з другим видом здійснення винаходу, напрямок пуску по суті відповідає нормалі до основної площини активної поверхні датчика, коли вона плоска або до центральної частини цієї поверхні, коли вона зігнута. Ультразвуковий хвильовий пучок розходиться. Зокрема, цей пучок розфокусований. Посилання робиться на фіг. 6А. Вона демонструє багатоелементний датчик С, звичайно плоский, квадратної форми, геометричний центр якого позначений S. Напрямок поширення D пучка ультразвукових хвиль, що також називається тут первинним напрямком, може бути визначений за допомогою наступних величин: - перший кут α, або "кут заломлення", який робить цей напрямок поширення з нормаллю N до головної площини датчика С (коли багатоелементний датчик не є плоским, то розглядається нормаль до центральної області цього датчика); - другий кут θ, що називається "кут нахилу" або, стисло, "нахил", що утворюється напрямком поширення D з напрямком позначеним R, цей останній зв'язаний з датчиком С і геометрією останнього, в площині Р перпендикулярній до нормалі N датчика С. Датчик С позиціонується переважно відносно труби, що інспектується таким чином, що основна площина датчика С спрямована по дотичній до труби, або, іншими словами, що нормаль N до основної площини датчика С в геометричному центрі S співпадає з радіусом труби, що розглядається. Пуск в напрямку D поширення дозволяє виявити, відповідно орієнтовані дефекти в трубі, тобто перпендикулярно до напрямку відповідному нахилу напрямку поширення D, або утворюючі певний кут з цим перпендикулярним напрямком. Відповідно до винаходу, пучок ультразвукових хвиль використовуються для перевірки, що розходиться навколо свого напрямку D поширення. Посилання робиться на фіг. 6В. Вона показує масив 41 з елементарних перетворювачів, розподілених в квадратній схемі. Без якого б то не було обмеження винаходу, масив 41 тут включає в себе 8×8 елементарні перетворювачі. Схема має першу вісь симетрії Х і другу вісь симетрії Y, відповідні відповідно серединним перпендикулярам сторін схеми. Переважно, ультразвуковий датчик розташовується відносно труби, що контролюється таким чином, щоб перша вісь симетрії Х або друга вісь симетрії Y схеми відповідала подовжньому напрямку труби. По угоді, вважається що, на фіг. 6В, датчик розташований так, що перша вісь симетрії х відповідає поперечному напрямку контрольованої труби. Перша вісь симетрії х служить як опорний напрямок у вимірюванні кута нахилу θ. У цьому відносному положенні ультразвукового датчика і труби, друга вісь симетрії Y масиву 41 відповідає подовжньому напрямку труби. Відповідно до першого виду здійснення даного винаходу, здійснюють щонайменше один пуск у визначеному напрямку нахилу, який відповідає орієнтації шуканих дефектів. У переважному розвитку першого виду здійснення даного винаходу, передбачене здійснення послідовно ультразвукового пуску за кожним з множини напрямків пуску, які 5 UA 114830 C2 5 відрізняються один від одного за значенням їх відповідної нахиленості θi (i=1, 2,. … n), виміряного відносно напрямку першої осі симетрії х датчика 41. Нахил θi визначається так, щоб гладко покрити кутовий сектор 2π радіан (360°). Таким чином, можна контролювати труби на існування дефектів незалежно від орієнтації цих дефектів в трубі. У ще більш переважному розвитку, здійснюють вісім послідовних ультразвукових пусків, які відрізняються один від одного за значенням їх відповідного нахилу θi (i=1, 2, … 8). У наступній таблиці перераховані характеристики різних пусків. Ранг пуску 1 2 3 4 5 6 7 8 10 15 20 25 30 35 40 45 50 Напрямок пуску D1 D2 D3 D4 D5 D6 D7 D8 Нахил (відносно напрямку х) θ1=0° θ2=45° θ3=90° θ4=135° θ5=180° θ6=225° θ7=270° θ8=315° У цій таблиці ранг пуску носить лише ілюстративний характер, важливо те, що по закінченню восьми пусків, покривається весь кутовий сектор 2π радіан. Порядок, в якому здійснюються пуски, не має особливого значення. Це зумовлено, зокрема, тим, що згідно з винаходом, можна змінювати напрямок поширення ультразвукового пучка без зміни орієнтації ультразвукового датчика відносно труби. Кожному пуску відповідає визначений часовий закон збудження, що спричиняє поширення результуючого пучка ультразвукових хвиль у визначеному цільовому напрямку Di, i:=1, 8, або напрямку пуску. Відповідно до першого варіанта першого виду здійснення винаходу, кожен часовий закон збудження включає в себе щонайменше два під-закони, що визначають, кожні, значення затримки, що застосовується до перетворювачів відповідної підмножини масиву 41 таким чином, що елементарні перетворювачі відповідної підмножини спільно виробляють первинний пучок ультразвукових хвиль відповідно до відповідного напрямку поширення, відповідні напрямки поширення первинних пучків розходяться один від одного і відносно напрямку Di пуску результуючого пучка, віддаляючись від ультразвукового датчика. У першій формі цього першого варіанта, первинні пучки несфокусовані, тобто, вони не мають фокусування, ні прямого, ні зворотного (інверсне фокусування також іноді називають розфокусуванням"). Наприклад, первинні пучки можуть мати фокусування віддалене порівняно з відстанню, що розділяє датчик від контрольованої труби. Наприклад, кожен первинний пучок має точку фокусування віддалену більше ніж на метр від датчика, в той час як останній знаходиться на відстані від труби, що знаходиться між 30 і 40 мм. У другій формі цього першого варіанта, кожен первинний пучок розфокусований, тобто, вони мають зворотне фокусування. Фокусна відстань знаходиться позаду ультразвукового датчика при розгляді шляху ультразвукових хвиль. Відповідні напрямки випромінювання первинних пучків утворюють відповідний кут з того і з іншого боку від напрямку поширення. Під-закони влаштовані так, що відповідні первинні пучки перетинають цільову поверхню труби, що контролюється відповідно з цільовим напрямком, у відповідних областях проникнення цієї поверхні, які прилягають одна до одної. Цей перший варіант першого виду здійснення відповідає випущенню пучка ультразвукових хвиль, що відхиляються і розходяться, пучок, який є результатом випущення декількох мультиспрямованих пучків, зокрема двоспрямованих. Під-пучки позбавлені фокусування або мають віддалене фокусування. Кожен під-закон визначається таким чином, що відповідна підмножина елементарних перетворювачів виробляє пучок, що називається первинним, напрямок поширення якого утворює кут нахилу β відносно цільового напрямку Di, i:=1,…, 8, з одного або з іншого боку цього напрямку. Напрямок поширення кожного первинного пучка такий, що він має нахил, який є похідним від нахилу θi, i:=1, 8 напрямки поширення Di, i:=1, 8, пучка, який виник в результаті складання, відповідно віднімання величини кута нахилу β. Кожен первинний пучок відхиляється і розходиться відносно цільового напрямку Di. 6 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 У несфокусованому пучку, ультразвукові хвилі, що виробляються різними елементарними перетворювачами, поширюються в основному паралельно одна до одної. Для одержання несфокусованого первинного пучка, застосовується для відповідної підмножини елементарних перетворювачів значення затримки, які слідують лінійному закону. Одержуваний з первинних пучків, пучок ультразвукових хвиль розходиться навколо напрямку пуску Di, i:=1,…, 8, віддаляючись від ультразвукового датчика. Згідно з другим варіантом першого виду здійснення винаходу, кожен закон часового збудження визначає значення затримки, які повинні застосовуватися щонайменше до частини перетворювачів таблиці 41 так, щоб елементарні перетворювачі спільно проводили первинний пучок ультразвукових хвиль, які проходять в напрямку випромінювання, або первинному напрямку, відповідному напрямку пуску Di і розходиться навколо цього напрямку пуску, віддаляючись від ультразвукового датчика. Цей другий варіант першого виду здійснення відповідає випромінюванню пучка ультразвукових хвиль, що розходиться і відхиляється відносно нормалі N до основної площини датчика. Пучок, що розходяться має кут розходження. Величина цього кута може бути визначена експериментально, можливо за допомогою моделювання, що дозволяє візуалізувати одержаний пучок. На практиці шукають значення кута розходження, які дозволяють охопити найбільший можливий кутовий сектор, зберігаючи при цьому хорошу якість виявлення. Це обмежує кількість пусків, необхідних для перевірки труби на існування дефекту будь-якого нахилу. Наприклад, можна спробувати охопити кутовий сектор 40°. Наприклад, можна використовувати значення кута розходження 22,5°. Звернемо увагу спочатку на конструкцію закону часового збудження, що дозволяє пуск в першому напрямку D1, у випадку першого варіанта здійснення. Елементарні перетворювачі масиву 41, розташовані на одній стороні першої осі симетрії х (ліва сторона на фіг. 6В), утворюють першу підмножину і спільно генерують пучок ультразвукових хвиль, несфокусований і нахилений під кутом -β відносно нахиленості напрямку D1. Елементарні перетворювачі, розташовані на іншій стороні першої осі симетрії х (права сторона на фіг. 6В), утворюють другу підмножину і будуть генерувати пучок ультразвукових хвиль, несфокусований і нахилений під кутом +β відносно цієї нахиленості. Два первинних пучки з'єднуються у напрямку D1 в результуючі пучки, тобто вони накладаються або з'єднуються в напрямку D1, щоб забезпечити передачу енергії у напрямку D1, таким чином, щоб результуючі пучки були енергетично однорідними між напрямками (D1-β) і (D1+β) на поверхні труби. Це приводить до великої фокальної плями на поверхні труби, або області озвучення, що дозволяє пошук несправностей досить широко нахилених відносно напрямку відповідного нахиленості напрямку пуску. Посилання робиться на фіг. 7А. Таблиця 70 показує в загальній манері значення затримки таблиці, що застосовуються до кожного елементарного перетворювача 41. Значення Bi, j затримки, що застосовується до елементарного перетворювача Ci, j таблиці 41, знаходиться на рядку i, стовпчика j таблиці 70. Посилання робиться на фіг. 7B. Таблиця 71 аналогічна таблиці 70. Таблиця 71 показує в загальній манері значення затримки, які повинні застосовуватися, для здійснення пуску в першому напрямку Di. Затримки, що застосовуються до перетворювачів однієї з підмножин виводяться із затримок, які застосовуються до перетворювачів іншої підмножини за допомогою симетрії, вісь якої відповідає першому напрямку симетрії х таблиці 41. Значення Bi, j затримки, що застосовується до перетворювача Ci, j, дорівнює значенню Bi, n-j+1 затримки, що застосовується до перетворювача Ci, n-j+1, ціле число n відповідає числу елементарних перетворювачів в рядку таблиці 41 (тут, n=8). Наприклад, значення B2,3 затримки, що застосовується до елементарного перетворювача C2,3 дорівнює значенню B2,6, що застосовується до елементарного перетворювача C2,6. Розглянемо по-іншому, один і той же під-закон часового збудження застосовується до кожного з двох підмножин елементарних перетворювачів таблиці 41. Для підмножини елементарних перетворювачів, набір значень затримки Bi, j, такий, що i:=від 1 до 8 і j:=від 1 до 4, може бути розрахований на основі законів розрахунку поширення й інтерференції ультразвукових хвиль, які відомі фахівцям в галузі. Цей розрахунок може бути, зокрема, здійснений вручну, за допомогою електронних таблиць, або за допомогою спеціального програмного забезпечення, наприклад, типу, відомого під ім'ям "CIVA", поширюваному компанією EXTENDE. 7 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 Таблиця Додатку А.3 показує закони транспозиції, які дозволяють, із значень затримки, одержаних для пуску в першому напрямку D1, вивести значення затримки для пуску в п'ятому напрямку D5 завдяки симетрії датчика. Значення затримки, які будуть застосовані до елементарних датчиків Ci, j для пуску в п'ятому напрямку D5, виводяться із значень розрахованих для пуску по D1 по трансформації, вказаній в додатку A.3. Значення затримки, які повинні застосовуватися до елементарних перетворювачів Ci, j для пуску в третьому напрямку D3 розраховуються аналогічно тому, що було зроблено для першого напрямку D1. Елементарні перетворювачі масиву 41, розташовані на одній стороні другої осі симетрії у (вгорі на фіг. 6В) утворюють перший піднабір і спільно генерують пучок ультразвукових хвиль, несфокусований і нахилений на кут -β відносно нахиленості напрямку D3. Елементарні перетворювачі, розташовані на іншій стороні другої осі симетрії у (внизу на фіг. 6В) утворюють другу підмножину і будуть генерувати пучок ультразвукових хвиль, несфокусованих і нахилених під кутом +β відносно цієї нахиленості. Два первинних пучки з'єднуються у напрямку D3 в результуючий пучок, тобто, вони накладаються або з'єднуються в напрямку D3 щоб забезпечити передачу енергії у напрямку D3, таким чином, щоб результуючий пучок був енергетично однорідним між напрямками (D3-β) і (D3+β) на поверхні труби. Це приводить до великої фокальної плями на поверхні труби, або області озвучення, що дозволяє пошук несправностей досить широко нахилених відносно напрямку відповідного нахиленості напрямку пуску. Додаток А.3 показує, що можна вивести із значень затримки для пуску в напрямку D3, за допомогою симетрії, значення затримки для сьомого напрямку D7 (по першій осі симетрії х). Звернемо увагу на пуск в напрямку D2. Елементарні перетворювачі масиву 41, розташовані на одній стороні конфігурації відповідної напрямку D2 (вгорі на фіг. 6В), утворюють перший піднабір і спільно генерують пучок ультразвукових хвиль, несфокусований і нахилений на кут -β відносно нахиленості напрямку D2. Елементарні перетворювачі, розташовані на іншій стороні цієї діагоналі (внизу на фіг. 6В) утворюють другу підмножину і будуть генерувати пучок ультразвукових хвиль, несфокусованих і нахилених під кутом +β відносно цієї нахиленості. Два первинних пучки з'єднуються у напрямку D2 в результуючмй пучок, тобто, вони накладаються або з'єднуються в напрямку D2, щоб забезпечити передачу енергії у напрямку D2, таким чином, щоб результуючий пучок був енергетично однорідним між напрямками (D2-β) і (D2+β) на поверхні труби. Це приводить до великої фокальної плями на поверхні труби, або області озвучення, що дозволяє пошук несправностей досить широко нахилених відносно напрямку відповідного нахиленості напрямку пуску. Додаток А.3 показує, що можна вивести із значень затримки для пуску в напрямку D2, внаслідок симетрії, значення затримки для четвертого напрямку D4 (по другій осі симетрії у; як показано в додатку А.1.4); потім для шостого напрямку D6, із значень затримки відповідних напрямку D4, внаслідок симетрії вздовж першої осі х. Значення затримки для пуску у восьмому напрямку D8 виводяться із значень затримки відповідних напрямку D2, внаслідок симетрії вздовж першої осі х, або значень затримки відповідних напрямку D6, внаслідок симетрії вздовж другої осі у. Додаток А.5 показує план адресації елементів, розподілених згідно з квадратною схемою, такий план може бути використаний для елементарних перетворювачів таблиці 41, наприклад. Привласнюється, як адреса, номер 1, або мінімальне значення адреси, елементарному перетворювачу, розташованому в кутку квадратної схеми. Елемент n°1 знаходиться в стовпчику C1 рядка L1 таблиці додатку А.5. Привласнюється, як адреса, номер 64, або максимальне значення адреси, елементарному перетворювачу, який діаметрально протилежний перетворювачу n°1. Цей елемент знаходиться в стовпчику С8 рядка L8 таблиці додатку А.5. З мінімального елемента адреси до максимального елемента адреси, елементи взаємно впорядковані по зростанню значення адрес і розташовані, в такому порядку, в рядки потім в стовпчику в тому ж рядку. Інакше кажучи, вони знаходяться в тому ж рядку схеми перетворювачів, значення адрес якого слідують один за іншим. У таблиці додатку А.5, значення адрес є послідовними цілими числами від 1 до 64. Фіг. 8 показує частину 80 багатоелементного датчика в робочому положенні відносно ділянки 82 контрольованої труби. Частина 80 являє собою таблицю елементарних перетворювачів, які утворюють квадратну схему, наприклад, аналогічно таблиці 41 на фіг. 6В. Подовжній напрямок труби позначений Y. Напрямок, перпендикулярний до головної площини частини 80, відповідний радіальному напрямку труби, відмічено Z. Напрямок, перпендикулярний до площини, визначеної напрямками Y і Z, позначається X. Частина 80 розташована відносно 8 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 ділянки 82 труби так, що осі симетрії схеми у і х, відповідні серединним перпендикулярам сторін схеми, відповідно вирівняні вздовж напрямків X і Y. Для прикладу, елементарні перетворювачі частини 80 організовані відповідно до плану адресації, описаного вище в зв'язку з додатком A5. Частина 80 розташована відносно ділянки 82 труби таким чином, що напрямок Х труби відповідає першій осі симетрії х між елементами n°4 і n°5, тоді як напрямок Y відповідає другій осі симетрії у між елементами n°25 і n°33. Елементи з n°1 по n°8 розташовані вздовж напрямку Y, у бік цього напрямку позначеного стрілкою на фіг. 8. Іншими словами, перша вісь симетрії х частини 80 розташована вздовж поперечного напрямку Х ділянки 82 труби, в той час як друга вісь симетрії у розташована вздовж подовжнього напрямку Y труби. Додаток А.1.1 показує в табличній формі, приклад значень затримки, які повинні застосовуватися до елементарних перетворювачів частини 80, щоб зробити пуск в поперечному напрямку Х ділянки 82 труби, тобто напрямок D1 фіг. 6В. В таблиці додатку A.1.1, елементарні перетворювачі розташовані відповідно до плану адресації, визначеному в додатку А.5. Значення затримки, яка повинна застосовуватися до елемента n°i, знаходиться в таблиці додатку A.1.1 в тій же позиції (рядок, стовпчик), що і адреса i в таблиці додатку А.5. Наприклад, затримка, що застосовується до елемента n°28, який розташований на перетині стовпчика С4 і рядка L4 таблиці додатку А.5, є 369 наносекунд, значення що знаходиться на перетині стовпчика C4 і рядка L4 таблиці додатку A.1.1. Фіг. 9А, 10А і 11А показують значення затримки додатку А.1.1 у вигляді гістограми 84 в двох вимірюваннях, основа якої співпадає з частиною 80. Кожен бар, або стрижень, діаграми являє собою затримку відповідного елементарного перетворювача, який співпадає з його основою. Висота стрижня, яка представлена у вигляді подовження вздовж напрямку Z, пропорційна значенню затримки, що застосовується до елементарного перетворювача, що розглядається. Фіг. 10А показує діаграму 84, вигляд праворуч, тобто, в проекції на площину напрямків X, Z і os перпендикулярного до напрямку Y. Тут відмічені елементарні перетворювачі n 8, 16, 24, 32, 40, 48, 56 і 64. Застосовуване значення затримки зростає лінійно від перетворювача n°8, поруч з першою стороною квадратної схеми, до перетворювача n°64, протилежно до цієї першої сторони. Це лінійна зміна затримок, що застосовуються схематизовано за допомогою прямої лінії 86 на фіг. 10А. Додаток А.1.1 показує, що той же лінійний закон зростання застосовується до елементарних перетворювачів кожного ряду вздовж напрямку Х, тобто, до елементів кожної з колонок C1-С8 таблиці додатку A.1.1. Фіг. 11 показує діаграму 84, вигляд спереду, тобто в проекції на площину напрямків Y, Z і os нормального напрямку протилежного напрямку X. Тут відмічені елементарні перетворювачі n 1, 2, 3, 4, 5, 6, 7 і 8, а також величини затримки, що застосовуються до кожного елементарного перетворювача ділянки 80. Ідентичні значення затримки застосовуються до елементарних перетворювачів, розташованих симетрично відносно серединного перпендикуляра частини 80, який проходить в напрямку X. Іншими словами, цей серединний перпендикуляр здійснює розділення частини 80 на дві підмножини елементарних перетворювачів, до яких застосовуються два під-закони затримки. Перший під-закон затримки застосовується до елементарних перетворювачів розташованих зліва від цього серединного перпендикуляра на фіг. 11A, зокрема перетворювачі os n з 1 по 4, в той час як другий під-закон затримки застосовується до елементарних os перетворювачів розташованих справа від цього серединного перпендикуляра, зокрема n з 5 по 8. Застосовуване значення затримки лінійно зменшується від перетворювача n°1, близького до другої сторони квадратної схеми до перетворювача n°4, близького до серединного перпендикуляра першої сторони. Ця лінійна зміна затримок, що застосовуються представлена прямою 88 на фіг. 11А. Додаток A.1.1 показує, що той же закон лінійного зменшення застосовується до елементарних перетворювачів кожного ряду у напрямку Y, розташованого на цій же стороні серединного перпендикуляра, тобто, в таблиці додатку A.1.1, до елементів кожного з рядків з L1 по L8, розташованих на перерізі зі стовпчиками з C1 по С4. Застосовуване значення затримки зростає лінійно від перетворювача n°5, близького до медіатриси до першої сторони, до перетворювача n°8, навпроти другої сторони. Ця лінійна зміна застосовуваної затримки представлена прямою 90 на фіг. 11А. Прямі 88 і 90 симетричні відносно площини X, Z, що містить медіатрису першої сторони квадратної схеми. Додаток А.1.1 показує, що той же закон лінійного зростання застосовується до елементарних перетворювачів кожного ряду у напрямку Y, розташованого на тій же стороні медіатриси, тобто, в таблиці 9 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 додатку A.1.1, до елементів кожної з рядків L1-L8 розташованих на перетині зі стовпчиками С5С8. Як тільки збуджені послідовно, згідно зі значеннями затримки, викладеними вище, елементарні перетворювачі кожної з двох підмножин спільно виробляють відповідний пучок ультразвукових хвиль. Два пучки, одержані таким чином, відповідно проходять вздовж двох відповідних напрямків, відмічених 92 і 94 на фіг. 11А, нахилені, кожні, під тим же самим кутом, по абсолютній величині, відносно напрямку випромінювання результуючого пучка, напрямок відмічений 96 на фіг. 11А. Кожен з цих двох пучків, які можуть бути охарактеризовані як первинні, відхиляються від наміченого напрямку віддаляючись від частини 80. Фіг. 12 аналогічна фіг. 8 і стосується випадку пуску вздовж подовжнього напрямку труби, тобто в напрямку Y труби, тобто напрямок D3 на фіг. 6A. Фіг. 12 показує значення затримки частини 80, що застосовуються до елементарних перетворювачів у вигляді гістограми 120. Частина 80 багатоелементного датчика знаходиться в робочому положенні, відносно ділянки 82 контрольованої труби, аналогічному показаному на фіг. 8. Відносно положення на фіг. 8, частина 80 може бути переміщена в подовжньому напрямку Y і/або під кутом відносно центральної осі ділянки 82 труби, із-за, наприклад, спірального відносного переміщення між трубою і датчиком. Додаток А.1.2 об'єднує значення затримки частини 80, що застосовується до елементарних перетворювачів, коли вони організовані відповідно до плану адресації, описаного вище в зв'язку з додатком A.5. То й же лінійний закон зростання застосовується до елементарних перетворювачів кожного ряду в напрямку Y, тобто, до елементів кожного з рядків від L1 до L8 таблиці додатку A.1.2. Застосовуване значення затримки зростає лінійно від перетворювачів близьких до сторони квадратної схеми перпендикулярної до напрямку Y, до перетворювачів протилежних до цієї сторони. Значення затримки таблиці можуть відхилятися від суворо лінійної зміни, тому що ці значення округлюються. Враховуючи дозвіл пристроїв, що звичайно застосовуються в області, порядку 5 наносекунд, ці округлення практично не впливають ніяким чином на виявлення дефектів. Ідентичні значення затримки застосовуються до елементарних перетворювачів, розташованих симетрично відносно медіатриси частини 80, яка простягається в напрямку Y. Той же самий закон лінійного зменшення застосовується до елементарних перетворювачів кожного вирівнювання в напрямку X, розташованих на цій же стороні медіатриси, тобто, в таблиці додатку A.1.2, до елементів кожного з стовпчиків з C1 по С8, розташованих на перерізі з рядками з L1 по L4. Кожен раз величина застосовуваної затримки лінійно убуває від перетворювача найближчого до сторони квадратної схеми перпендикулярно до напрямку X до перетворювача найближчого до медіатриси другої сторони. Той же закон лінійного зростання застосовується до елементарних перетворювачів кожного вирівнювання в напрямку X, розташованих на тій же стороні медіатриси, тобто, в таблиці додатку A.1.2, до елементів кожного з стовпчиків з C1 по С8, розташованих на перерізі з рядками з L5 по L8. Кожен раз значення застосовуваної затримки збільшується лінійно від перетворювача найближчого до медіатриси другої сторони до перетворювача протилежного першій стороні. Після послідовного збудження, згідно зі значеннями затримки, викладеними вище, елементарні перетворювачі кожного з двох підмножин разом виробляють відповідний пучок ультразвукових хвиль. Два пучки, одержані таким чином, відповідно проходять вздовж двох відповідних напрямків, кожен з яких нахилений під одним і тим же кутом, по абсолютній величині, відносно напрямку випромінювання результуючого пучка, що у випадку пуску в подовжньому напрямку труби. Кожен з цих двох первинних пучків відхиляється від цільового напрямку, віддаляючись від частини 80. Посилання робиться на фіг. 13А і 14. Фіг. 14 аналогічна фіг. 8 і стосується випадку пуску, який називається "кутовим", тобто в напрямку нахиленому під кутом 45° до осі труби в площині X, Y, тобто в напрямку D2 на фіг. 6В. Фіг. 14 показує значення затримки застосовувані до елементарних перетворювачів частини 80 у вигляді гістограми 130. Фіг. 13А показує діаграму 130 під іншим кутом огляду. Частина 80 багатоелементного датчика знаходиться в робочому положенні відносно ділянки 82 контрольованої труби аналогічному показаному на фіг. 8. Відносно положення на фіг. 8, частина 80 може бути переміщена в подовжньому напрямку Y і/або під кутом відносно центральної осі ділянки 82 труби, із-за, наприклад, гелікоїдального відносного переміщення між трубою і датчиком. 10 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 Додаток А.1.3 об'єднує значення затримки, застосовувані до елементарного перетворювача частини 80, коли вони організовані відповідно до плану адресації, описаного вище в зв'язку з додатком A.5. Відповідні лінійні закони зростання застосовуються до елементарних перетворювачів кожного ряду в напрямку Y, тобто, до елементів кожного з рядків з L1 по L8 таблиці додатку A.1.3. Кожен раз, значення застосовуваної затримки лінійно зростає від перетворювачів близьких до другої сторони квадратної схеми, до перетворювачів протилежних до цієї другої сторони. Відповідні лінійні закони зростання застосовуються до елементарних перетворювачів кожного ряду в напрямку X, тобто, до елементів кожного зі стовпчиків C1-С8 таблиці додатку A.1.3. Кожен раз значення застосовуваної затримки лінійно зростає від перетворювачів близьких до першої сторони квадратної схеми, до перетворювачів протилежних до цієї першої сторони. Після послідовного збудження, згідно зі значеннями затримки, викладеними вище, елементарні перетворювачі кожної з двох підмножин, розділених одна від одної діагоналлю квадратної схеми, спільно виробляють відповідні пучки ультразвукових хвиль. Два пучки, одержані таким чином, відповідно проходять вздовж двох відповідних напрямків, кожне з яких нахилений під одним і тим же кутом, по абсолютній величині, відносно напрямку випромінювання результуючого пучка. Кожен з цих двох первинних пучків відхиляється від наміченого напрямку віддаляючись від частини 80. У більш загальному плані перейдемо тепер до побудови часового закону збудження що дозволяє похилий пуск, наприклад, вздовж другого напрямку D2, у випадку першого варіанта здійснення. Напрямок пуску D2 відповідає осі симетрії таблиці 41, а саме — одній з діагоналей квадратної схеми. Ця діагональ розмежовує дві підмножини елементарних перетворювачів, нижня підмножина і верхня підмножина. Через кривизну контрольованої труби значення затримки, що застосовуються до першої з цих підмножин, відрізняються від значень затримки, що застосовуються до симетричних перетворювачів другої з цих підмножин. Посилання робиться знов на фіг. 7А. Спочатку розраховується перші значення затримки Bi, j, що застосовуються до множини елементарних перетворювачів Ci, j таблиці 41, щоб вони разом випромінювали несфокусований пучок ультразвукових хвиль, відхилений в напрямку D2-β. Ці значення в загальному вигляді згруповані в таблиці 70. Посилання робиться на фіг. 15. Потім обчислюють другі значення затримки Ai, j, що застосовуються до множини елементарних перетворювачів Ci, j таблиці 41, щоб вони спільно випромінювали несфокусований пучок ультразвукових хвиль, відхилені в напрямку D2+β. Ці значення в загальному вигляді представлені в таблиці 73. Посилання робиться на фіг. 16. Потім вибирається один з напрямків випромінювання D2+β і D2-β для діагоналі схеми таблиці 41, тобто, що нарешті призначають перетворювачам Ci, j діагоналі або перші значення затримки Bi, j, або другі значення затримки Ai, j. За угодою, можна вибрати значення, які максимізують затримку перетворювачів, які розташовані на кожному кінці цієї діагоналі. Наприклад, вважають, у випадку таблиці 72 на фіг. 16, що цей критерій задовольняється значеннями A8,1 і A1,8 таблиці 73, а не значеннями B8,1 і B1,8 таблиці 70, через вищу потребу в енергії в напрямку, відповідному елементам А, пов'язаної зі слабшою відповіддю в цьому напрямку, слабкість, яка виникає з геометрії труби. Зберігають значення затримки закону відповідного іншим кутам, а саме, в прикладі, друге значення A1,1 і перше значення B8,8. Призначають як кінцеві значення затримки для елементів Ci, j верхньої частини таблиці 41 другі значення затримки Ai, j. Кінцеві значення затримки для елементів Ci, j нижньої частини таблиці 41 виходять шляхом лінійної інтерполяції на основі перших значень затримки Bi, j. Спочатку використовують значення затримки у куті відповідної частини таблиці, значення якої визначені, для обчислення значення затримки відповідного стовпчика і рядка за допомогою лінійної інтерполяції. Потім, інтерполюють в кожному випадку між значенням визначеної діагоналі і значенням в кінці рядка або стовпчика. Іншими словами, зберігають значення половини таблиці, відповідної діагоналі, в той час як інші значення затримки злегка змінюються, за допомогою лінійної інтерполяції по спочатку одержаних значеннях. 11 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 Звернемося тепер до фіг. 9В, 10В, 11В і 13В, які ілюструють значення затримки, які будуть застосовані до елементарних перетворювачів у другому варіанті здійснення даного винаходу. Відповідно до цього другого варіанта здійснення, елементарні перетворювачі разом виробляють первинний пучок, розфокусований і такий, що відхиляється відносно нормалі до основної площини датчика. Щоб обчислити закони затримки, пучок, що розходиться, можна, розглядати як пучок з інверсним фокусуванням, тобто, який має віртуальний фокус розташований за багатоелементним датчиком вздовж напрямку пуску ультразвукових хвиль. Щоб одержати розфокусований результуючий пучок, переважно застосовують щонайменше до деяких з елементарних перетворювачів датчика значення затримки, які додержуються параболічного закону. Альтернативно, ці значення затримки одержують на основі закону близького до параболічного закону, наприклад, що відповідає множині лінійних законів апроксимуючих кожну ділянку однієї параболи. У доповнення до нахиленості свого основного напрямку, пучок, що відхиляється і розходиться, може бути визначений за значенням кута α відхилення і значенням кута величини пучка, або кута δ дивергенції. Кут α відхилення визначається залежно від діаметра контрольованої труби і відстані, що відділяє датчик від цієї труби. Він відрізняється для кожного пуску залежно від напрямку D1, D2 і D3. Для пусків в інших напрямах значення кута α відхилення виводяться з симетрії схеми датчика. Значення кута δ розбіжності може бути однаковим для всіх пусків, незалежно від цільового напрямку. Ми намагаємося створити найбільший кут розходження, сумісного з критеріями якості і/або швидкості, які собі поставили. Наприклад, величина кута розбіжності може витікати з того, що кількість кадрів зафіксована, через вимогу виробництва. Це приводить до мінімального значення δ кута дивергенції. Значення кута розбіжності також може бути результатом критерію якості, пов'язаного з розміром дефектів, що хочуть мати можливість виявити. Це диктує максимальне значення кута δ розбіжності. У більшості випадків, значення кута δ розбіжності вибирається так, щоб воно найкращим чином відповідало цим критеріям. Ці величини можуть бути визначені методом послідовних проб, або моделювання, на еталонних виїмках, орієнтація і глибина яких взаємно відповідає несправностям, які шукають в трубі. Наприклад, значення кута δ розбіжності, що дорівнює 22,5°, може бути використане. Фігури 9B, 10B і 11B аналогічні фігурам 9А, 10А і 11А. Вони показують в формі гістограми 140 приклад значень затримки, що застосовуються до елементарних перетворювачів частини 80 датчика для виробництва пуску в поперечному напрямку Х ділянки 82 труби. Перетворювачі адресовані відповідно до додатку А.5. Значення затримки наведені в таблиці додатку A.2.1. Фіг. 10В показує діаграму 140, вигляд праворуч, тобто, в проекції на площину напрямків X, Z os і нормального напрямку Y. Тут відмічені елементарні перетворювачі n 8, 16, 24, 32, 40, 48, 56 і 64. Значення затримки, що застосовується, зростає параболічно від перетворювача n°8, поруч з першою стороною квадратної схеми, до перетворювача n°64, протилежного цій першій стороні. Ця параболічна зміна застосовуваних затримці схематично відображена на ділянці 142 параболи на фіг. 10В. Додаток А.2.1 показує, що той же закон зростання застосовується до елементарних перетворювачів кожного ряду в напрямку X, тобто, до елементів кожного зі стовпчиків C1-С8 таблиці додатку А.2.1. Фіг. 11B показує діаграму 140, вигляд спереду, тобто, в проекції в площині напрямків Y, Z і нормального напрямку протилежного напрямку X. Тут, відмічені елементарні перетворювачі os n 1, 2, 3, 4, 5, 6, 7 і 8, а також значення затримки застосовуваної до елементарних перетворювачів частини 80. Ідентичні значення затримки застосовуються до елементарних перетворювачів, розташованих симетрично відносно медіатриси частини 80, яка проходить в напрямку X. Ця медіатриса здійснює розділення частини 80 на дві підмножини елементарних перетворювачів, до яких відповідно застосовуються два під-закони затримки. Перший під-закон затримки застосовується до елементарних перетворювачів, розташованих на одній стороні цієї os медіатриси, зокрема до перетворювачів n 1-4, розташованих зліва від цієї медіатриси на фіг. 11В. Другий під-закон затримки застосовується до елементарних перетворювачів, os розташованих на іншій стороні цієї медіатриси, зокрема до перетворювачів n 5-8, розташованих праворуч від цієї медіатриси на фіг. 11В. Значення затримки застосовується слідуючи параболічному закону від перетворювача n°1, близького до сторони квадратної схеми, до перетворювача n°8, віддаленого від цієї сторони. Ця зміна застосовуваних затримок показана схематично на ділянці 144 параболи на фіг. 11B. 12 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 Значення затримки зменшується від перетворювача n°1 до перетворювача n°4. Додаток А.2.1 показує, що той же закон параболічного зменшення застосовується до елементарних перетворювачів кожного ряду в напрямку Y, розташованих на тій же стороні медіатриси, тобто, в таблиці додатку А.2.1, до елементів кожного з рядків L1-L8, розташованих на перетині зі стовпчиками C1-С4. Значення застосовуваної затримки зростає від перетворювача n°5, поруч з медіатрисою, до перетворювача n°8. Додаток А.2.1 показує, що той же закон параболічного зростання застосовується до елементарних перетворювачів кожного ряду в напрямку Y, розташованому на тій же стороні медіатриси, тобто, в таблиці додатку А.2.1, до елементів кожного з рядків L1L8, розташованих на перетині зі стовпчиками С5-С8. Після послідовного збудження, згідно зі значеннями затримки, викладеними вище, елементарні перетворювачі кожної з двох підмножин спільно виробляють пучок ультразвукових хвиль, який проходять в напрямку Х і який розходиться, віддаляючись від частини 80 датчика. Таблиця додатку А.2.2 з'єднує значення затримки, які можуть бути застосовані до елементарних перетворювачів для спільного виробництва пучка ультразвукових хвиль, що розходяться, який проходить в напрямку Y. Ідентичні значення затримки застосовуються до елементарних перетворювачів, розташованих симетрично відносно медіатриси частини 80, яка розташована вздовж напрямку X. Ця медіатриса здійснює розділення частини 80 на дві підмножини елементарних перетворювачів, до яких відповідно застосовуються два під-закони затримки. Фіг. 13B аналогічна фіг. 13А і стосується випадку пуску, який називається "похилим", тобто в напрямку, нахиленому під кутом 45° до осі труби в площині X, Y, тобто в напрямку D2 на фіг 6В. Фіг. 13B показує значення затримки частини 80, що застосовуються до елементарних перетворювачів у вигляді гістограми 150. Частина 80 багатоелементного датчика знаходиться в робочому положенні відносно ділянки 82 контрольованої труби, аналогічної показаній на фіг 8. Відносно положення на фіг. 8, частина 80 може бути переміщена в подовжньому напрямку Y і/або під кутом відносно центральної осі ділянки 82 труби, із-за, наприклад, гелікоїдального відносного переміщення між трубою і датчиком. Додаток А.2.3 з'єднує значення затримки, які повинні застосовуватися до елементарних перетворювачів частини 80, коли вони організовані відповідно до плану адресації, описаного вище в зв'язку з додатком A.5. Відповідні параболічні закони зростання застосовуються до елементарних перетворювачів кожного вирівнювання в напрямку Y, тобто, до елементів кожного з рядків L1-L8 таблиці додатку A.2.3. Кожен раз, значення застосовуваної затримки збільшується в параболічній манері від перетворювачів близьких до сторони квадратної схеми, до перетворювачів, протилежних цій стороні відносно напрямку X. Відповідні параболічні закони зростання застосовуються до елементарних перетворювачів кожного ряду в напрямку X, тобто, до елементів кожного зі стовпчиків C1-С8 таблиці додатку A.2.3. Кожен раз, значення застосовуваної затримки збільшується в параболічній манері від перетворювачів, близьких до однієї сторони квадратної схеми, до перетворювачів, протилежних цій стороні відносно напрямку Y. Після послідовного збудження, згідно зі значеннями затримки, викладеними вище, елементарні перетворювачі кожної здвох підмножин, відділені один від одного діагоналлю квадратної схеми, спільно виробляють пучок ультразвукових хвиль, що проходить в напрямку D2 і розходиться відносно цього напрямку в міру того, як він рухається від датчика. Аналогічно тому, що було описано вище відносно першого варіанта здійснення, можна використовувати різні симетрії схеми датчика для виведення певних законів затримки із законів, розрахованих для інших напрямків пуску. Тепер зосередимося на другому варіанті здійснення винаходу, в якому елементарні перетворювачі разом виробляють результуючий не відхилений пучок, що розходиться, який поширюються в напрямку, перпендикулярному до головної площини датчика. У цьому другому варіанті здійснення, здійснюється один пуск з ультразвукових хвиль. Пучок, що розходиться, може бути визначений значенням кута ширини пучка, або кутом δ розбіжності. У цьому виді здійснення, перша вісь симетрії х і друга вісь симетрії у схеми таблиці 41 розмежовують чотири підмножини елементарних перетворювачів, до яких застосовуються, кожен раз, той же самий під-закон затримки. Таблиця додатку А.4 показує приклад значень затримки, що застосовуються до елементарних перетворювачів для генерації результуючого пучка, що розходиться і не відхиляється, відносно напрямку нормалі до активної поверхні датчика. Тут цей пучок, що розходиться, виходять з розфокусованого первинного пучка. 13 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 60 Кожен раз, значення затримки збільшується з віддаленням від кожної з першої осі симетрії х і другої осі симетрії у. Описані два варіанти здійснення першого виду здійснення винаходу, що дозволяють здійснити послідовно пуски в різних напрямках. У кожному з цих пусків, "озвучують" велику ділянку інспектованої труби, генеруючи результуючий пучок, що розходиться. Значна ділянка труби виявляється перетнутою ультразвуковими хвилями, викликаними пуском. Відхилення одержаного пучка дозволяє виявити присутність дефектів, що мають відповідну орієнтацію відносно труби. У першому варіанті, пучок, що відхиляється і розходиться, одержаний від щонайменше двох первинних пучків, які несфокусовані і відхиляються; відповідно згенерованих підмножиною елементарних перетворювачів. У другому варіанті, пучок, що відхиляється і розходиться, одержаний від щонайменше одного первинного пучка, що розходиться і відхиляється. Крім того, описаний другий вид здійснення, який дозволяє здійснити єдиний пуск, для виявлення наявності дефектів, незалежно їх нахилу. Крім того, характер пучка, що розходиться, дозволяє озвучити велику частину контрольованої труби. У кожному випадку, симетрія датчика використовується для розрахунку під законів затримки, які застосовуються до підгрупи елементарних перетворювачів. Ультразвукові хвилі, одержані як відповідь на пуск, потім обробляються з метою виявлення яких-небудь відгуків, що відбуваються внаслідок наявності дефектів або недоліків. У першому варіанті розвитку винаходу, обробка одержаних ультразвукових хвиль включає застосування закону затримки, що називається "інверсним" закону затримок, що використовується для випущення ультразвукових хвиль під час пуску. Іншими словами, обробка одержаних ультразвукових хвиль включає застосування конкретного значення затримки Ri, j до захопленого сигналу від кожного елементарного перетворювача Ci, j датчика. Значення Ri, j затримки при прийомі обчислюється із значення Ei, j затримки прикладеної до елементарного перетворювача Ci, j при випромінюванні, згідно з наступною формулою: Ri, j=max(Ei, j)-Ei, j Величина max(Ei, j) являє собою максимальне значення затримки із значень Ei, j затримки, що застосовуються до елементарних перетворювачів датчика. Розрахунок зворотного закону затримки може бути зроблений за допомогою програмного забезпечення, що дозволяє розрахувати закон затримки випромінювання, за допомогою електронної таблиці або вручну. Таким чином в основному виявляють, в секції інспектованої труби, дефекти або недоліки, орієнтовані відповідно до напрямку пуску. Також можуть бути виявлені дефекти злегка нахилені відносно цього напрямку, в межах вікна первинного пучка, звичайно відношення сигналу до шуму слабше. Переважно, у другому розвитку, обробка одержаних ультразвукових хвиль включає застосування техніки відомої з документа WO 03/050527. Для кожного пуску обробляється одержаний сигнал із застосуванням декількох інверсних законів затримки, кожен з яких відповідає значенню нахилу, що полягає в первинному пучку. Ці зворотні закони затримки, звичайно, розраховуються за допомогою відомих з WO 03/050527 техніки. Наприклад, різні значення нахилів відрізняються один від одного на величину 5°. Після пуску виявляються в секції інспектованої труби дефекти, орієнтовані в різних нахиленостях, що містяться в первинному пучку одержаних від цього пуску з, в кожен раз, відношенням сигналу до шуму практично ідентичного. У цьому другому розвитку дефекти, орієнтація яких відразу міститься у вікні пучка ультразвукових хвиль відповідних пуску і нахилених відносно нахиленості основного напрямку цього пучка, виявляються з кращим співвідношенням сигналу до шуму. Іншими словами, цей другий розвиток поліпшує виявлення тонких дефектів. Ще іншими словами, пристрій в цьому випадку демонструє краще розрізнення. Наприклад, з пучком при випромінюванні що має кут відкриття 40°, і застосування законів затримки відповідних нахилам, що дорівнюють 5°, особливо ефективно виявляються дефекти нахилу 0, +/-5°, +/-10°, +/-15°, +/-20° відносно основного напрямку пучка. Посилання робиться на фіг. 17, 18А і 18В. Ці фігури представляють області, що називаються "зонами озвучення", тобто, уражені частиною щонайменше одного з ультразвукових пучків, що використовуються для перевірки всіх можливих орієнтацій дефектів. Ці фігури є результатом моделювання. Фіг. 17 відповідає еталонній конфігурації. У цій конфігурації були зроблені 72 пуски, кожен раз відповідно до напрямку нахиленості 5° відносно попереднього пуску. Фіг. 17 показує область озвучення 170 до -6 дБ, або фокальну зону, де зосереджена максимальна енергія. Область 170 має форму еліптичного кільця і є практично однорідною. Область 170 озвучення має розмір близько 50 міліметрів на 30 міліметрів. 14 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 18A відповідає конфігурації згідно з першим варіантом першого виду здійснення, у випадку, де застосовується техніка, що називається "пензель", або "paintbrush" англійською мовою, в післяобробці. Параметр β дорівнює 15°. Тільки 8 пусків були необхідні для одержання результату з фіг. 18А. Амплітуди практично однорідні для сукупності цільових напрямків. Фіг. 18А показує область 180 озвучення, вигляд якої наближається до еліптичного кільця. Область 180 озвучення має розмір приблизно 50 міліметрів на 35 міліметрів, що дуже близько до еталонної області з фіг. 17. Фіг. 18B відповідає конфігурації згідно з другим видом здійснення, у випадку, коли застосовується метод, відомий як "пензель" в післяобробці. Пучок розфокусований на 25 міліметрів. Фіг. 18В показує область озвучення 185, форма якої еліптична. Область 185 децибел має розмір 80 міліметрів на 60 міліметрів, що близько до еталонної області на фіг. 17. Область 6 дБ децибел ширша, ніж у першому виді здійснення. Центральна частина еліпса також озвучена, в той час як ця область має найменшу корисність для перевірки труби. Порівняно з фіг. 18А, фіг. 18В показує більш рівномірну область 185 озвучення, відповідаючи практично ідентичному рівню енергії для всіх напрямків перевірених. Порівняно з фіг. 18B, фіг. 18А показує не озвучену центральну область еліпса, що приводить до кращого відношення сигнал-шум. Проте, другий вид здійснення забезпечує велику швидкість перевірки. Ніякої діаграми озвучення відповідної другому варіанту першого виду здійснення не показано. Така діаграма має еліптичну зону озвучення, ширшу, ніж ті, що показані на малюнках 17, 18а і 18b. Це приводить до відносної втрати енергії і співвідношення сигнал-шум. Проте, ця діаграма показує велику однорідність в цільових напрямках, що полегшує контроль. Зокрема, немає необхідності компенсувати енергетичні відмінності між різними цільовими напрямками. Заявнику вдалося задовільно проконтролювати трубу на існування дефектів, орієнтованих будь-яким чином тільки лише за вісім пусків, при збереженні швидкості подачі звичайної в даній області. Описаний пристрій, який може контролювати трубу на існування дефектів будь-якого нахилу зі швидкістю, сумісною з темпами виробництва. Цей виграш швидкості зумовлений насамперед тим, що будь-яка зміна положення датчика відносно труби між двома послідовними пусками, в різних напрямках, некорисна. У пристрої, що розглядається, для кожного цільового напрямку, генерується відповідними частинами квадратного багатоелементного датчика пучок ультразвукових хвиль, що розходяться відносно цільового напрямку і з'єднуються в момент удару по зовнішній поверхні контрольованої труби. Цей пристрій не обмежується датчиком, що має квадратну схему. Він може бути використаний еквівалентним чином з датчиком, в якому елементарні перетворювачі розташовані у вигляді прямокутника. Він також може бути використаний з датчиком, в якому елементарні перетворювачі розподілені по колу. У цьому випадку, ті ділянки схеми відповідні кожному пучку, що розходиться, відповідають кутовому сектору схеми. Можна, наприклад, здійснити послідовні пуски в різних секторах, із законами затримки, які можуть бути розраховані з використанням програмного забезпечення, аналогічного відомому під назвою "CIVA". Винахід також може бути розглянутий як спосіб контролю довгого металургійного виробу, зокрема труби, в якому багато разів використовують описаний пристрій для пуску в кожному з напрямків від D1 до D8. Винахід також може бути розглянутий як спосіб контролю металургійних виробів, в якому проводять пуск ультразвукових хвиль в цільовому напрямку за допомогою ультразвукового зонда, що включає в себе множину елементарних перетворювачів, які працюють незалежно один від одного і розподілені у вигляді схеми в двох вимірюваннях із застосуванням часового закону збудження до елементарних перетворювачів, цей часовий закон збудження містить один або більше під-закон для кожної підмножини, що послідовно збуджується, щонайменше з множини елементарних перетворювачів, кожен під-закон влаштований так, що збудження елементарних перетворювачів відповідної підмножини виробляє відповідний первинний пучок ультразвукових хвиль, і один або більше під-закони додатково виконані таким чином, що вказаний пуск відповідає пучку ультразвукових хвиль, одержаному з первинних пучків відповідних ультразвукових хвиль підмножин елементарних перетворювачів, вказаний результуючий пучок розходиться навколо цільового напрямку, віддаляючись ультразвукового датчика. Описане значення кута β в 20° як приклад, зокрема, в рамках пуску вздовж D1. Величина цього кута може бути скоректована відповідно до розміру елементарних перетворювачів. Наприклад, можна збільшити значення цього кута, коли розмір перетворювачів зменшується. 15 UA 114830 C2 5 10 15 20 25 30 Відповідно до одного аспекту даного винаходу, під-закони застосовуються таким чином, щоб одночасно збуджувати елементарні перетворювачі, розташовані взаємно симетрично відносно переважного напрямку вказаної схеми. Хоча були описані осі симетрії квадратної схеми, як переважні напрямки, винахід не обмежується цим конкретним варіантом здійснення. Для схем різних форм відповідають, в кожному випадку, переважні напрямки цих схем. Наприклад, схема, в якій елементи перетворювачів виконані у вигляді кутових секторів і розташовані симетрично відносно деяких радіальних напрямків, наприклад, нахилені на 120° один до одного, має ці радіальні напрямки як переважні напрямки. Конкретніше описаний ультразвуковий датчик матричного виду, що містить 64 елементи, розташовані відповідно до квадратної схеми 8 елементів на 8 елементів. Винахід не обмежений ні за кількістю елементів, ні цією конкретною схемою. Для кожного випадку ультразвуковий пуск дозволяє перевіряти подовжню ділянку труби на наявність дефектів. Щоб контролювати цю трубу на всій її довжині, можна переміщувати трубу і ультразвуковий датчик один відносно одного. У варіанті здійснення даного винаходу, можуть бути використані декілька ультразвукових датчиків розташованих поруч один з одним в подовжньому напрямку контрольованої труби. Задіюючи ці датчики одночасно один з одним, можна інспектувати, для кожного відносного положення датчика і труби, довшу ділянку труби. У ще одному розвитку, можна використовувати матричний багатоелементний ультразвукової датчик, схему якого розділяють на елементарні під-схеми і введуть в дію кожну схему одночасно з іншими у вигляді окремого ультразвукового датчика. Таким чином, перевіряється довша ділянка контрольованої труби. Наприклад, такий ультразвукової датчик може містити 256 елементів, розподілених відповідно до прямокутної схеми 8 елементів на 32 елементи. При розташуванні датчика так, що довжина схеми відповідає довжині труби, віртуально розташовують 8 багатоелементних датчиків з квадратною схемою 8 елементів на 8 елементів, розташованих вздовж довжини труби. І ми можемо ввести в дію ці 8 датчиків одночасно для перевірки значної довжини труби, при кожному пуску. Винахід не обмежений видами здійснення, описаними вище, виключно як приклад, але охоплює всі варіанти, які можуть бути передбачені фахівцем в галузі. Додаток A.1: Значення затримки, відповідні першому виду здійснення, перший варіант (в наносекундах) Додаток A.1.1: пуск в напрямку D1 Додаток A.1.2: пуск в напрямку D3 16 UA 114830 C2 Додаток A.1.3: пуск в напрямку D2 Додаток A.1.4: пуск в напрямку D4 5 Додаток A.2: Значення затримки, відповідні першому виду здійснення, другий варіант (в наносекундах) Додаток A.2.1: пуск в напрямку D1 17 UA 114830 C2 Додаток A.2.2: пуск в напрямку D3 Додаток A.2.3: пуск в напрямку D2 5 Додаток A.3: закони транспозиції значень затримки 18 UA 114830 C2 Напрямок пуску D1 D2 D3 D4 D5 D6 D7 D8 Значення затримки Розраховуються Розраховуються Розраховуються Виводяться із значень D2 Виводяться із значень D1 Виводяться із значень D4 Виводяться із значень D3 Виводяться із значень D6 Перетворення Немає Немає Немає Bi, j:=Bi, n+1-j Bi, j:=Bn+1-i, j Bi, j:=Bn+1-i, j Bi, j:=Bn+1-i, j Bi, j:=Bi, n+1-j Додаток A.4: значення затримки, відповідні другому виду здійснення (в наносекундах) 5 Додаток A.5: матриця адресації елементарних перетворювачів датчика ФОРМУЛА ВИНАХОДУ 10 15 1. Пристрій контролю металургійних виробів такого типу, що включає в себе: - ультразвуковий датчик (5; 7; С), який включає в себе множину елементарних перетворювачів (9), що працюють незалежно один від одного і розподілені згідно зі схемою (41) в двох вимірюваннях; - першу електроніку (27), здатну збуджувати кожен з елементарних перетворювачів згідно зі щонайменше одним часовим законом, відповідним пуску ультразвукових хвиль в прицільному напрямку; - другу електроніку (31), здатну обробляти щонайменше частину сигналів, захоплених кожним з елементарних перетворювачів; 19 UA 114830 C2 5 10 15 20 25 30 35 40 45 50 55 який відрізняється тим, що кожен часовий закон встановлений так, що відповідний пуск виробляє пучок ультразвукових хвиль, який звичайно розходиться навколо прицільного напрямку, віддаляючись від ультразвукового датчика. 2. Пристрій за п. 1, в якому кожен часовий закон містить щонайменше один часовий підзакон для збудження щонайменше однієї відповідної підмножини елементарних перетворювачів (9). 3. Пристрій за п. 2, в якому кожна підмножина елементарних перетворювачів відповідає відповідній ділянці схеми (41). 4. Пристрій за п. 3, в якому вказані ділянки схеми відповідають в їх сукупності розділенню згаданої схеми. 5. Пристрій за будь-яким з пп. 2-4, в якому кожен підзакон влаштований так, що збудження елементарних перетворювачів (9) відповідної підмножини виробляє первинний пучок ультразвукових хвиль, і згаданий пучок ультразвукових хвиль, що звичайно розходиться, одержаний з відповідних первинних пучків ультразвукових хвиль підмножин елементарних перетворювачів (9). 6. Пристрій за будь-яким з попередніх пунктів, в якому кожен часовий закон влаштований так, що відповідне збудження елементарних перетворювачів (9) виробляє один або декілька первинних пучків, і згаданий пучок ультразвукових хвиль, що звичайно розходиться, одержаний з первинного пучка або первинних пучків ультразвукових хвиль. 7. Пристрій за п. 6, в якому кожен первинний пучок поширюється вздовж відповідного напрямку, який розходиться від прицільного напрямку, віддаляючись від ультразвукового датчика. 8. Пристрій за будь-яким з пп. 6-7, в якому кожен первинний пучок по суті позбавлений фокусування. 9. Пристрій за будь-яким з пп. 6-7, в якому кожен первинний пучок розфокусований в прицільному напрямку. 10. Пристрій за будь-яким з пп. 6-7, в якому кожен часовий закон влаштований так, що відповідне збудження елементарних перетворювачів (9) виробляє єдиний первинний пучок ультразвукових хвиль, розфокусований в прицільному напрямку. 11. Пристрій за будь-яким з пп. 6-10, в якому первинні пучки зустрічають цільову поверхню, відповідну прицільному напрямку у відповідних областях проникнення цієї поверхні, які є суміжними одна з одною. 12. Пристрій за будь-яким з попередніх пунктів, в якому первинні пучки поширюються вздовж відповідних напрямків, по суті нахилених на один і той же кут з одного і з іншого боку від прицільного напрямку. 13. Пристрій за будь-яким з попередніх пунктів, в якому кожен прицільний напрямок відповідає відповідному переважному напрямку схеми. 14. Пристрій за п. 13, в якому кожен переважний напрямок відповідає осі симетрії схеми. 15. Пристрій за будь-яким з попередніх пунктів, в якому схема відповідає таблиці квадратної або прямокутної форми. 16. Пристрій за будь-яким з попередніх пунктів, в якому множина елементарних перетворювачів розподілена по активній поверхні ультразвукового датчика, і кожен прицільний напрямок нахилений відносно напрямку, перпендикулярного до активної поверхні в центральному положенні схеми. 17. Пристрій за будь-яким з пп. 1-16, в якому множина елементарних перетворювачів розподілена на активній поверхні ультразвукового датчика, і прицільний напрямок є перпендикулярним до активної поверхні, щонайменше в центральному положенні схеми. 18. Пристрій за п. 4, в якому розділення схеми відповідає осям симетрії цієї схеми, які відповідають прицільному напрямку. 19. Пристрій за будь-яким з попередніх пунктів, в якому щонайменше деякі з часових законів містять підзакони, ідентичні для одночасного збудження елементарних перетворювачів, розташованих у взаємній симетрії відносно переважного напрямку схеми. 20. Пристрій за будь-яким з попередніх пунктів, в якому прицільні напрямки нахилені один відносно іншого, по суті, ідентичним чином. 21. Спосіб контролю металургійних виробів, що включає в себе наступні етапи: A) передбачають ультразвуковий датчик (5; 7; С), що включає в себе множину елементарних перетворювачів (9), що працюють незалежно один від одного і розподілені згідно зі схемою (41) у двох вимірюваннях; B) збуджують кожен з елементарних перетворювачів для виробництва пуску ультразвукових хвиль відповідного пучка, що звичайно розходиться навколо прицільного напрямку, віддаляючись від ультразвукового датчика; 20 UA 114830 C2 C) обробляють щонайменше частину сигналів, перетворювачів у відповідь на ультразвуковий пуск. 21 захоплених кожним з елементарних UA 114830 C2 22 UA 114830 C2 23 UA 114830 C2 24 UA 114830 C2 25 UA 114830 C2 26 UA 114830 C2 27 UA 114830 C2 Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 28
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice and method for the non-destructive control of metal profiles
Автори англійськоюMichel, Raphael, Noel, Alexandre, Vahe, Michel
Автори російськоюМишель Рафаэль, Ноэль Александр, Вае Мишель
МПК / Мітки
МПК: G01N 29/26
Мітки: пристрій, неруйнівного, профілів, спосіб, металевих, контролю
Код посилання
<a href="https://ua.patents.su/30-114830-pristrijj-i-sposib-nerujjnivnogo-kontrolyu-metalevikh-profiliv.html" target="_blank" rel="follow" title="База патентів України">Пристрій і спосіб неруйнівного контролю металевих профілів</a>
Спосіб неруйнівного контролю глибини корозійного пошкодження та товщини металевих виробів
Номер патенту: 36639
Опубліковано: 10.11.2008
Автори: Карпаш Олег Михайлович, Карпаш Максим Олегович, Рибіцький Ігор Володимирович, Криничний Петро Якович
МПК: G01B 17/02, G01N 29/04
Мітки: спосіб, пошкодження, товщини, виробів, глибини, контролю, корозійного, неруйнівного, металевих
Формула / Реферат:
Спосіб неруйнівного контролю глибини корозійного пошкодження та товщини металевих виробів, що включає їх неперервне однобічне ультразвукове сканування за допомогою п'єзоперетворювача ультразвукових коливань і реєстрацію відбитих коливань від протилежних стінок поверхонь металевого виробу, який відрізняється тим, що п'єзоперетворювач ультразвукових коливань розміщують над виробом на сталій висоті між п'єзоперетворювачем і стінкою виробу,...
Спосіб неруйнівного корозійного контролю металевих виробів
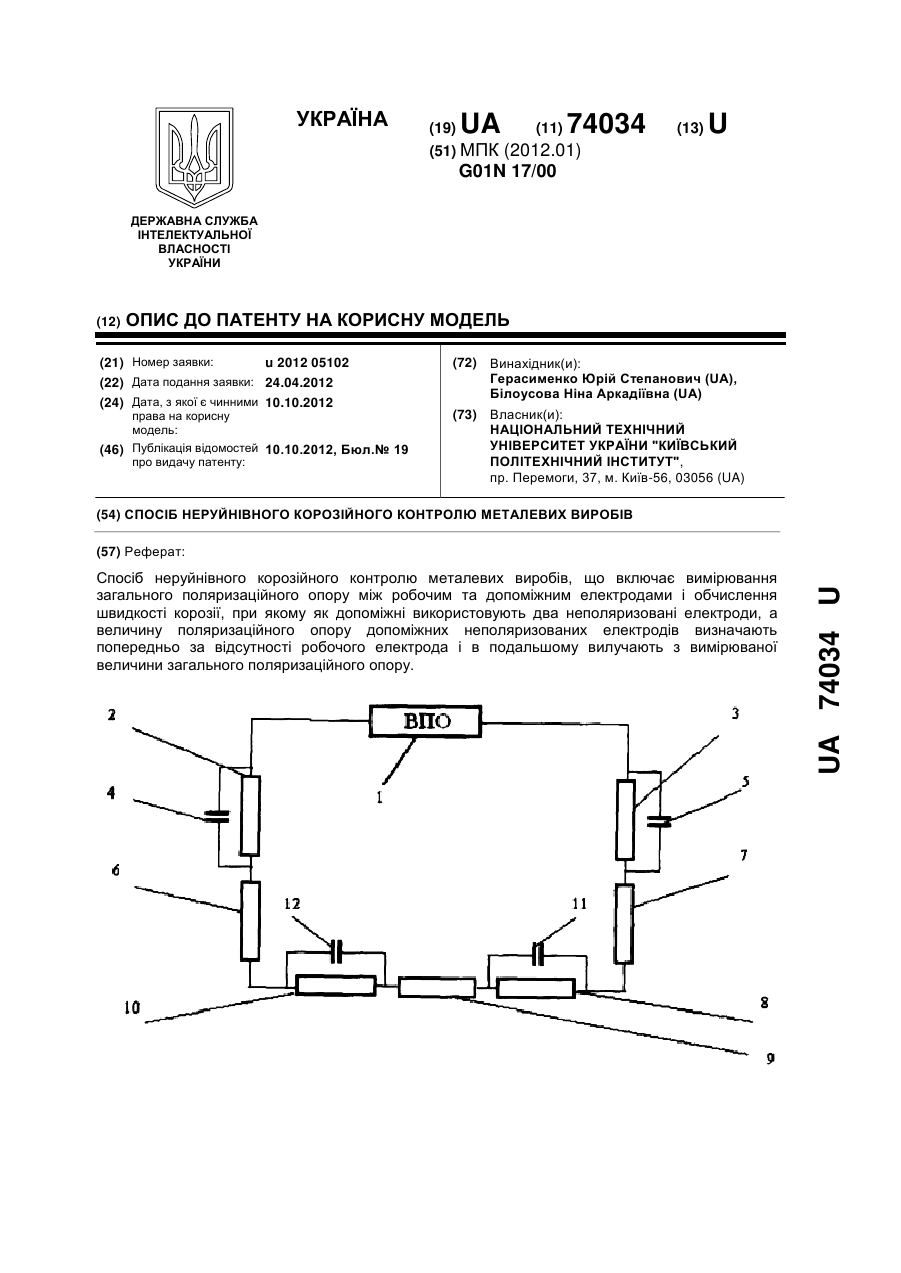
Номер патенту: 74034
Опубліковано: 10.10.2012
Автори: Білоусова Ніна Аркадіївна, Герасименко Юрій Степанович
МПК: G01N 17/00
Мітки: спосіб, неруйнівного, металевих, корозійного, виробів, контролю
Формула / Реферат:
Спосіб неруйнівного корозійного контролю металевих виробів, що включає вимірювання загального поляризаційного опору між робочим та допоміжним електродами і обчислення швидкості корозії, який відрізняється тим, що як допоміжні використовують два неполяризовані електроди, а величину поляризаційного опору допоміжних неполяризованих електродів визначають попередньо за відсутності робочого електрода і в подальшому вилучають з вимірюваної величини...
Спосіб неруйнівного контролю вологості деревини в процесі сушіння
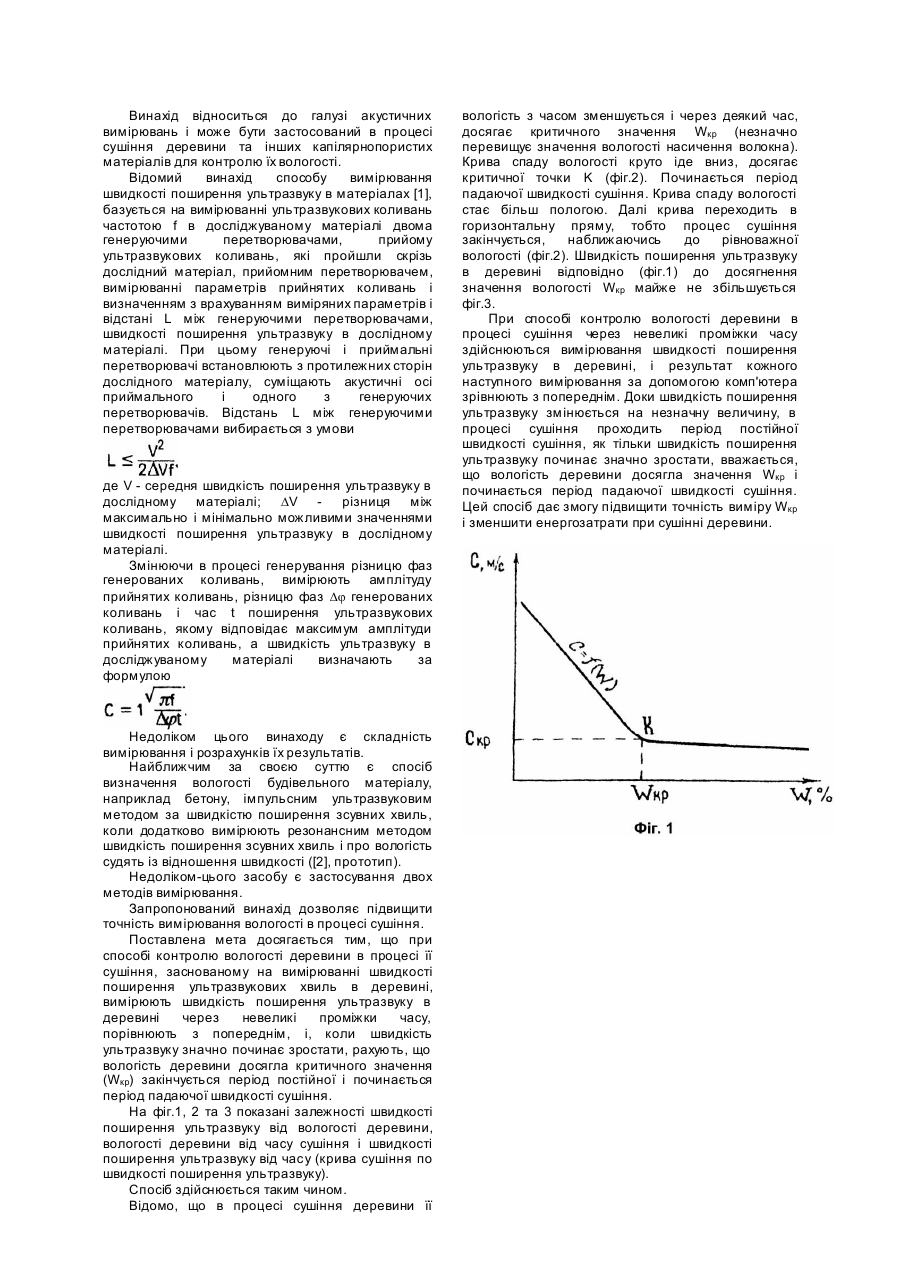
Номер патенту: 24346
Опубліковано: 17.07.1998
Автори: Поберейко Богдан Петрович, Соколовський Ярослав Іванович, Воронов Віктор Георгійович, Книш Юрій Вікторович, Гнатишин Ярослав Михайлович, Філінюк Роман Васильович, Гербей Володимир Михайлович, Ільницький Іван Миколайович, Качанов Петро Олексійович, Сафаров Вячеслав Олександрович
МПК: G01N 29/07
Мітки: вологості, сушіння, спосіб, процесі, деревини, контролю, неруйнівного
Формула / Реферат:
Спосіб неруйнівного контролю вологості деревини в процесі сушіння, заснований на вимірюванні швидкості поширення ультразвуку в деревині, який відрізняється тим, що швидкість поширення ультразвуку в деревині визначають через невеликі проміжки часу, а результат кожного наступного вимірювання порівнюють з попереднім, і, коли швидкість поширення ультразвуку значно починає зростати, рахують, що вологість деревини досягла критичного значення,...
Спосіб неруйнівного експрес-контролю якості комплексних електролітичних покриттів на металевих виробах
Номер патенту: 56980
Опубліковано: 10.02.2011
Автори: Стечишин Мирослав Степанович, Стечишина Надія Мирославівна, Білик Юрій Мирославович
МПК: G01N 29/04, G01N 29/00
Мітки: металевих, покриттів, експрес-контролю, виробах, електролітичних, неруйнівного, якості, спосіб, комплексних
Формула / Реферат:
1. Спосіб неруйнівного експрес-контролю якості комплексних електролітичних покриттів на металевих виробах, який включає здійснення порівняльного аналізу з еталоном, який відрізняється тим, що в лужному середовищі потенціостатом знімають кінетику зміни потенціалу в часі на металевих виробах (зразках) з нанесеними покриттями, записують криві φ-τ та проводять порівняльний аналіз цих кривих з кривими для еталонних зразків, причому...
Луна-дифракційний спосіб неруйнівного контролю довгомірних виробів
Номер патенту: 43950
Опубліковано: 10.09.2009
Автори: Ноздрачова Катерина Леонідівна, Сучков Григорій Михайлович
МПК: G01N 29/36
Мітки: контролю, довгомірних, луна-дифракційний, неруйнівного, спосіб, виробів
Формула / Реферат:
Луна-дифракційний спосіб контролю довгомірних стрижнів ультразвуковими імпульсами, який полягає у тому, що у виробі збуджують ультразвукове поле вздовж виробу, приймають відбиті від дефектів сигнали і на основі їх аналізу визначають його якість, який відрізняється тим, що ультразвукові об'ємні імпульси збуджують похилим перетворювачем під кутом до поверхні вздовж твірної в одному напрямку таким чином, що у стрижні за рахунок перевідбиття від...
Попередній патент: Порційна капсула й спосіб приготування напою за допомогою порційної капсули
Наступний патент: Гнучкий багатошаровий з’єднувальний шлейф
Випадковий патент: Патрон