Радіолокаційна система
Номер патенту: 19788
Опубліковано: 15.12.2006
Автори: Зайцев Анатолій Якимович, Торгонський Володимир Васильович, Білокоз Сергій Сергійович, Гузь Володимир Іванович, Ліпатов Валерій Павлович, Піронер Ян Михайлович, Хоменко Микола Васильович, Фількевич Олександр Сергійович, Бутирін Анатолій Вікторович
Формула / Реферат
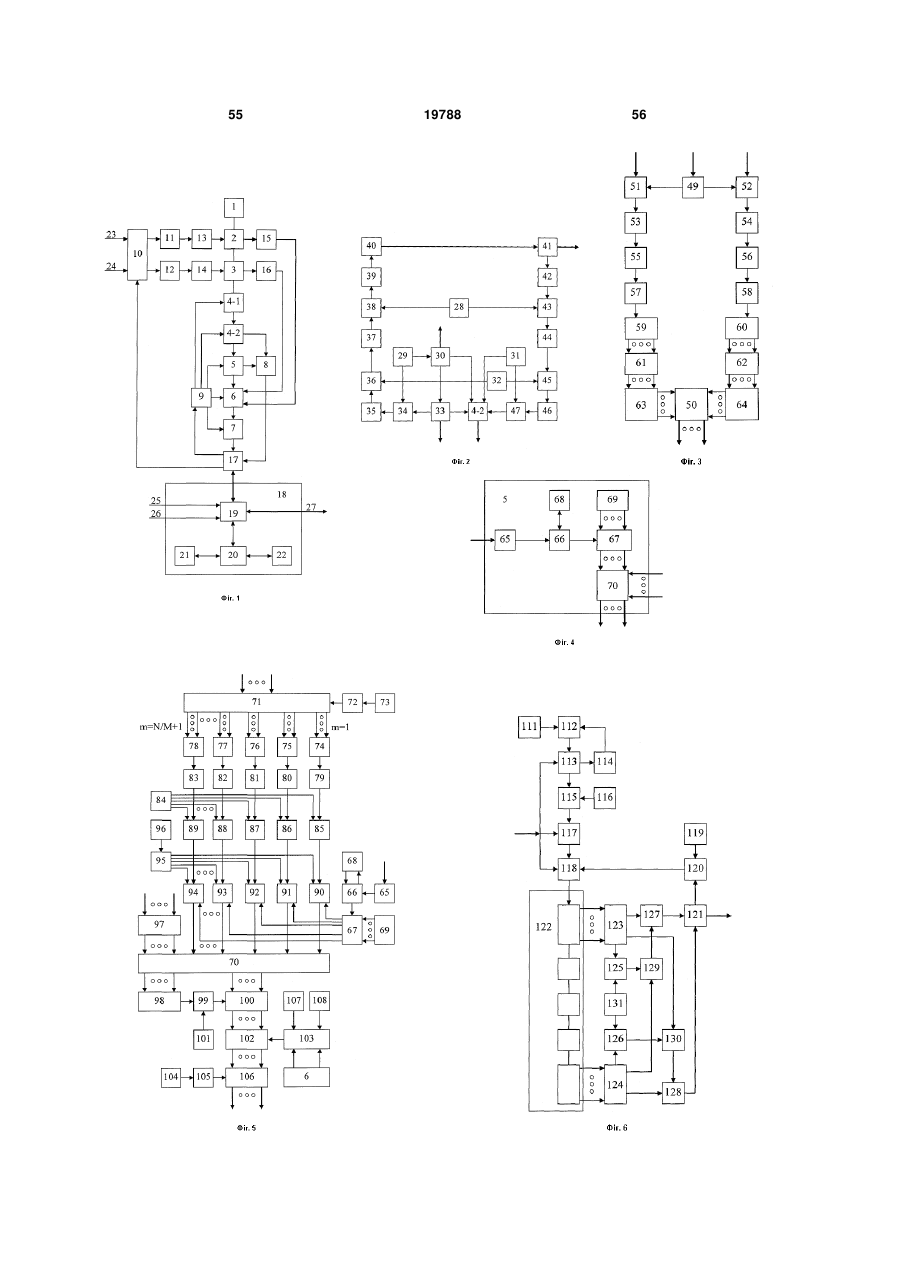
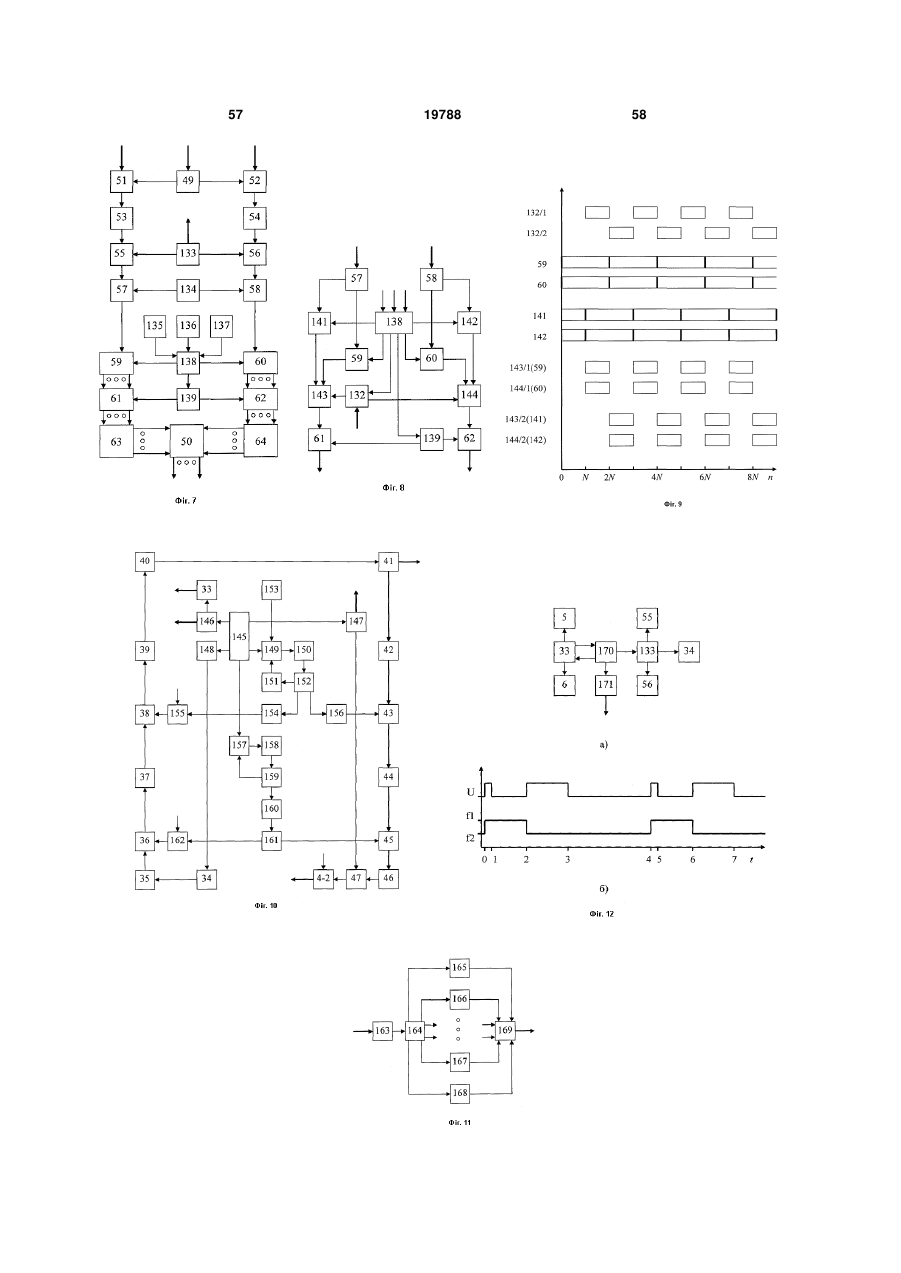
1. Радіолокаційна система, що містить антену, обертальні переходи за кутом місця та курсовим кутом, пристрій відліку координат, пристрій вторинної обробки, відеопроцесор, процесор керування, контролер, перший та другий пристрої керування приводам, привід повороту антени, привід обертання антени, датчик кута місця, датчик курсового кута, перший процесор обміну, приймально-передавальний пристрій, що має у своєму складі когерентний гетеродин, перший та другий стабільні гетеродини, генератор коливань частоти дискретизації, формувач тактових імпульсів, синхронізатор, формувач зондувальних сигналів, перший та другий передавальні перетворювачі частоти, перший, другий та третій передавальні підсилювачі, вихідний передавальний підсилювач, антенний перемикач, вхідний приймальний пристрій, перший та другий приймальні перетворювачі частоти, перший та другий приймальні підсилювачі, аналого-цифровий перетворювач, пристрій цифрової обробки сигналів, що має у своєму складі цифровий квадратурний генератор, перший та другий цифрові перетворювачі частоти, перший та другий фільтри децимації, перший та другий оптимальні фільтри, першу та другу схеми черезперіодної обробки, перший та другий обчислювачі швидкого перетворення Фур'є, першу та другу схеми вагової обробки, першу та другу схеми піднесення до квадрата та перший багатоканальний суматор, виявник сигналів, що має у своєму складі першу багатоканальну порогову схему, багатоканальний обчислювач порогових рівнів від завад, перший багатоканальний датчик коефіцієнтів, фільтр нульової швидкості, фільтр міжоглядового накопичення та радіолокаційну карту завад, пульт керування, що має у своєму складі центральний процесор, пристрій відображення, маніпулятор та другий процесор обміну, причому антена через обертальні переходи за кутом місця та курсовим кутом з'єднана з другим плечем антенного перемикача, виходи пристрою цифрової обробки сигналів підключені до сигнального входу виявника сигналів та до першого входу відеопроцесора, виходи виявника сигналів підключені до сигнальних входів пристрою відліку координат та другого входу відеопроцесора, вихід пристрою відліку координат підключений до входу пристрою вторинної обробки, виходи відеопроцесора та пристрою вторинної обробки через перший та другий процесори обміну підключені до центрального процесора, командні виходи центрального процесора через другий та перший процесори обміну з'єднані з процесором керування та контролером, командні виходи процесора керування підключені до відповідних входів приймально-передавального пристрою, виявника сигналів, пристрою цифрової обробки сигналів, пристрою відліку координат та пристрою вторинної обробки, виходи контролера підключені до входів першого та другого пристроїв керування приводами, виходи останніх підключені відповідно до приводу повороту антени та приводу обертання антени, датчик кута місця та датчик курсового кута механічно зв'язані з відповідними приводами антени, виходи датчиків кута місця та курсового кута підключені до пристрою відліку координат, виходи когерентного гетеродина підключені до формувача тактових імпульсів та формувача зондувальних сигналів, який через послідовно з'єднані перший передавальний підсилювач, перший передавальний перетворювач частоти, другий передавальний підсилювач, другий передавальний перетворювач частоти, третій та вихідний передавальні підсилювачі підключені до першого плеча антенного перемикача, третє плече антенного перемикача з'єднане з вхідним приймальним пристроєм, вихід якого через послідовно з'єднані перший приймальний перетворювач частоти, перший приймальний підсилювач, другий приймальний перетворювач частоти, другий приймальний підсилювач та аналого-цифровий перетворювач підключені до сигнальних входів пристрою цифрової обробки сигналів, виходи першого стабільного гетеродина підключені до гетеродинних входів другого передавального та першого приймального перетворювачів частоти, виходи другого стабільного гетеродина підключені до гетеродинних входів першого передавального та другого приймального перетворювачів частоти, виходи формувача тактових імпульсів підключені до тактових входів пристрою цифрової обробки сигналів, виявника сигналів, пристрою відліку координат та синхронізатора, виходи синхронізатора підключені до входів синхронізації формувача зондувальних сигналів, пристрою цифрової обробки сигналів, виявника сигналів, пристрою відліку координат та вихідного передавального підсилювача, виходи генератора коливань частоти дискретизації підключені до тактових входів аналого-цифрового перетворювача, цифрового квадратурного генератора, першого та другого цифрових перетворювачів частоти та першого і другого фільтрів децимації, виходи цифрового квадратурного генератора підключені до гетеродинних входів першого та другого цифрових перетворювачів частоти, перший вихід аналого-цифрового перетворювача через послідовно з'єднані перший цифровий перетворювач частоти, перший фільтр децимації, перший оптимальний фільтр, першу схему черезперіодної компенсації, перший обчислювач швидкого перетворення Фур'є, першу схему вагової обробки та першу схему піднесення до квадрата підключений до першого входу першого багатоканального суматора, другий вихід аналого-цифрового перетворювача через послідовно з'єднані другий цифровий перетворювач частоти, другий фільтр децимації, другий оптимальний фільтр, другу схему черезперіодної компенсації, другий обчислювач швидкого перетворення Фур'є, другу схему вагової обробки та другу схему піднесення до квадрата підключений до другого входу першого багатоканального суматора, вихід нульового частотного каналу першого багатоканального суматора підключений до входу фільтра нульової швидкості, а вихід останнього підключений до входу фільтра міжоглядового накопичення, вихід фільтра міжоглядового накопичення підключений до радіолокаційної карти завад та перших входів багатоканального обчислювача порогових рівнів від завад, до других входів якого підключені відповідні за порядковими номерами виходи першого багатоканального датчика коефіцієнтів, виходи багатоканального обчислювача порогових рівнів від завад підключені до відповідних за порядковими номерами опорних входів першої багатоканальної порогової схеми, яка відрізняється тим, що до складу виявника сигналів введені комбінаторний пристрій, перший та другий датчики параметрів завад, перший та другий обчислювачі номерів частотних каналів, другий багатоканальний датчик коефіцієнтів, схеми відбору максимуму, обчислювачі поточного рівня завад, обчислювачі порогових рівнів від шуму, обчислювачі підсумкових порогових рівнів, датчик поправок, обчислювач поправок, першу багатоканальну схему затримки, другий суматор, датчик порогового рівня, другу порогову схему, першу схему часового подавлення, схему подавлення частотних каналів, датчики меж за відстанню та за курсовим кутом, обчислювач просторових стробів, схему просторової селекції, причому перші виходи частотних каналів першого багатоканального суматора з порядковими номерами від 0 до N-1 через першу багатоканальну схему затримки з'єднані з відповідними за порядковими номерами сигнальними входами першої багатоканальної порогової схеми (тут N - розмірність швидкого перетворення Фур'є), другі виходи частотних каналів першого багатоканального суматора з порядковими номерами від 0 до N-1 з'єднані із входами комбінаторного пристрою, (тут N - розмірність швидкого перетворення Фур'є), перший вихід комбінаторного пристрою з першою фракцією частотних каналів з порядковими номерами від 0 до S та від (N-S) до (N-1) підключені до першої схеми відбору максимуму (тут N - розмірність швидкого перетворення Фур'є; S - половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості), другий вихід комбінаторного пристрою з другою фракцією частотних каналів з порядковими номерами від S+1 до М-1 підключені до другої схеми відбору максимуму (тут М - номінальна кількість частотних каналів у стандартній фракції; S - половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості), третій вихід комбінаторного пристрою з третьою фракцією частотних каналів з порядковими номерами від N-M до N-S-1 підключені до третьої схеми відбору максимуму (тут N - розмірність швидкого перетворення Фур'є; М - номінальна кількість частотних каналів у стандартній фракції; S - половина кількості частотних каналів малорухомих завад за винятком каналу нульової швидкості), m-й вихід комбінаторного пристрою з m-ю фракцією частотних каналів з порядковими номерами від [(m-3)×М] до [(m-2)×М-1] підключені до m-ї схеми відбору максимуму, причому m змінюється від 4 до (N/M+1), (тут N - розмірність швидкого перетворення Фур'є; М - номінальна кількість частотних каналів у стандартній фракції), виходи схем відбору максимуму з'єднані зі входами відповідних за порядковими номерами обчислювачів поточного рівня завад, входи обчислювачів порогових рівнів від шуму підключені до відповідних за порядковими номерами виходів другого багатоканального датчика коефіцієнтів та до виходів відповідних за порядковими номерами обчислювачів поточного рівня завад, входи обчислювача поправок з'єднані з виходами датчика поправок, перші входи багатоканального обчислювача порогових рівнів від завад підключені до виходу фільтра міжоглядового накопичення, а другі його входи підключені до відповідних за порядковими номерами виходів першого багатоканального датчика коефіцієнтів, виходи обчислювача поправок, багатоканального обчислювача порогових рівнів від завад та обчислювачів порогових рівнів від шуму підключені до входів відповідних за порядковими номерами обчислювачів підсумкового порогового рівня, виходи обчислювачів підсумкових порогових рівнів підключені до відповідних за порядковими номерами опорних входів першої багатоканальної порогової схеми, перші виходи першої багатоканальної порогової схеми підключені до входів другого суматора, входи другої порогової схеми підключені до виходу другого суматора та першого датчика порогового рівня, вихід другої порогової схеми підключений до керуючого входу першої схеми часового подавлення, датчики меж за відстанню і за курсовим кутом та координатні виходи пристрою відліку координат підключені до входів обчислювача просторових стробів, вихід схеми формування просторових стробів підключений до керуючого входу схеми просторової селекції, входи другого обчислювача номерів частотних каналів з'єднані з другим датчиком параметрів завад, а його вихід підключений до керуючого входу схеми подавлення частотних каналів, другі виходи першої багатоканальної порогової схеми через послідовно включені першу схему часового подавлення, схему подавлення частотних каналів та схему просторової селекції підключені до входів пристрою відліку координат.
2. Радіолокаційна система за п. 1, яка відрізняється тим, що до складу обчислювача поточного рівня завад введені перший, другий, третій, четвертий та п'ятий помножувачі, третій, четвертий, п'ятий та шостий суматори, третя, четверта та п'ята порогові схеми, друга та третя схеми затримки, комутатор, третій, четвертий, п'ятий та шостий датчики коефіцієнтів, причому вихід схеми відбору максимуму підключений до першого входу третього суматора, до сигнального входу третьої порогової схеми та до першого сигнального входу комутатора, перший вхід першого помножувача з'єднаний з третім датчиком коефіцієнтів, а другий його вхід через другу схему затримки - з першим виходом третього суматора, другий вхід третього суматора підключений до виходу першого помножувача, входи другого помножувача з'єднані з шостим датчиком коефіцієнтів та з другим виходом третього суматора, вихід другого помножувача підключений до керуючого входу третьої порогової схеми, керуючий вхід комутатора з'єднаний з виходом третьої порогової схеми, а вихід комутатора підключений до входу третьої схеми затримки, третя схема затримки має відгалуження через кожний елемент розрізнення за відстанню, найбільший час затримки третьої схеми затримки складає не менше ніж (2×R+V-1) елементів розрізнення за відстанню (тут R - кількість відгалужень для кожної навчаючої вибірки; V - кількість відгалужень у проміжку між навчаючими вибірками), відгалуження третьої схеми затримки з порядковими номерами від 0 до R-1 приєднані до входів четвертого суматора (тут R - кількість відгалужень для кожної навчаючої вибірки), відгалуження третьої схеми затримки з порядковими номерами від (R+V) до (2×R+V-1) приєднані до входів п'ятого суматора (тут R - кількість відгалужень для кожної навчаючої вибірки; V - кількість відгалужень у проміжку між навчаючими вибірками), виходи четвертого суматора приєднані до сигнального входу другої схеми подавлення, першого входу третього помножувача та сигнального входу п'ятої порогової схеми, виходи п'ятого суматора приєднані до сигнального входу третьої схеми подавлення, першого входу четвертого помножувача та сигнального входу четвертої порогової схеми, другий вхід третього помножувача підключений до першого виходу четвертого датчика коефіцієнтів, а вихід третього помножувача приєднаний до опорного входу четвертої порогової схеми, другий вхід четвертого помножувача підключений до другого виходу четвертого датчика коефіцієнтів, а вихід четвертого помножувача приєднаний до опорного входу п'ятої порогової схеми, керуючий вхід другої схеми подавлення підключений до виходу четвертої порогової схеми, керуючий вхід третьої схеми подавлення підключений до виходу п'ятої порогової схеми, входи шостого суматора приєднані до виходів другої та третьої схем подавлення, входи п'ятого помножувача підключені до п'ятого датчика коефіцієнтів та першого виходу шостого суматора, вихід п'ятого помножувача приєднаний до другого сигнального входу комутатора, другий вихід шостого суматора підключений до входу відповідного за порядковим номером обчислювача порогового рівня від шуму.
3. Радіолокаційна система за пп. 1 або 2, яка відрізняється тим, що до складу пристрою цифрової обробки сигналів введені сьомий датчик коефіцієнтів, датчик параметрів зондувальних сигналів, датчик кутової швидкості обертання антени, датчик ширини променя антени, датчик періоду повторювання зондувань, обчислювач розмірності перетворення та обчислювач вагових коефіцієнтів, причому керуючі входи першого та другого оптимальних фільтрів та формувача зондувальних сигналів підключені до датчика параметрів зондувальних сигналів, керуючі входи першого та другого фільтрів черезперіодної компенсації підключені до сьомого датчика коефіцієнтів, входи обчислювача розмірності перетворення підключені до датчика кутової швидкості обертання антени, до датчика ширини променя антени та до датчика періоду повторювання зондувань, керуючі входи першого та другого обчислювачів швидкого перетворення Фур'є та вхід обчислювача вагових коефіцієнтів підключені до виходів обчислювача розмірності перетворення, керуючі входи першої та другої схем вагової обробки підключені до виходів обчислювача вагових коефіцієнтів.
4. Радіолокаційна система за пп.1 або 2, або 3, яка відрізняється тим, що до складу пристрою цифрової обробки сигналів введені перша схема керування, третій та четвертий обчислювачі швидкого перетворення Фур'є, перший та другий мультиплексори, причому перший та третій обчислювачі швидкого перетворення Фур'є включені паралельно, другий та четвертий обчислювачі швидкого перетворення Фур'є включені паралельно, виходи першого та третього обчислювачів швидкого перетворення Фур'є підключені до входів першого мультиплексора, вихід якого підключений до першої схеми вагової обробки, виходи другого та четвертого обчислювачів швидкого перетворення Фур'є підключені до входів другого мультиплексора, вихід якого підключений до другої схеми вагової обробки, керуючі входи першого, другого, третього та четвертого обчислювачів швидкого перетворення Фур'є підключені до виходів обчислювача розмірності перетворення, керуючі входи мультиплексорів підключені до виходів першої схеми керування, а її входи підключені до синхронізатора та четвертого виходу обчислювача розмірності перетворення.
5. Радіолокаційна система за пп.1 або 2, або 3, або 4, яка відрізняється тим, що до складу приймально-передавального пристрою введені генератор коливань опорної частоти, перший помножувач частоти як генератор коливань частоти дискретизації, другий помножувач частоти як когерентний гетеродин, перший подільник частоти як формувач коливань тактової частоти, а до складу першого стабільного гетеродина введені перший синтезатор частоти, перший керований генератор, другий подільник частоти, схема призначення номера частоти, перший розподільник, перший та другий підсилювачі і четверта схема часового подавлення, до складу другого стабільного гетеродина введені другий синтезатор частоти, другий керований генератор, другий та третій розподільники, третій підсилювач, п'ята схема часового подавлення, причому виходи генератора коливань опорної частоти підключені відповідно до перших входів першого та другого синтезаторів частоти, до входів першого та другого помножувачів частоти та до входу подільника частоти, другий вхід першого синтезатора частоти з'єднаний з виходом другого подільника частоти, третій вхід першого синтезатора частоти з'єднаний із схемою призначення номера частоти, вихід першого синтезатора частоти з'єднаний зі входом першого керованого генератора, вихід якого підключений до входу першого розподільника, перший вихід першого розподільника з'єднаний зі входом другого подільника частоти, другий вихід першого розподільника через перший підсилювач та четверту схему часового подавлення з'єднаний з гетеродинним входом другого передавального перетворювача частоти, третій вихід першого розподільника через другий підсилювач з'єднаний з гетеродинним входом першого приймального перетворювача частоти, вихід другого синтезатора частоти приєднаний до входу другого керованого генератора, а вихід останнього з'єднаний з входом другого розподільника, перший вихід другого розподільника з'єднаний з другим входом другого синтезатора частоти, другий вихід другого розподільника через третій підсилювач з'єднаний з входом третього розподільника, перший вихід третього розподільника через п'яту схему часового подавлення з'єднаний з гетеродинним входом першого передавального перетворювача частоти, другий вихід третього розподільника з'єднаний з гетеродинним входом другого приймального перетворювача частоти, керуючі входи четвертої та п'ятої схем часового подавлення підключені до відповідних виходів синхронізатора.
6. Радіолокаційна система за пп. 1 або 2, або 3, або 4, або 5, яка відрізняється тим, що вихідний передавальний підсилювач виконаний на напівпровідникових підсилюючих модулях.
7. Радіолокаційна система за п. 6, яка відрізняється тим, що до її складу введена друга схема керування, причому її виходи підключені до синхронізатора та датчика параметрів зондувальних сигналів, а її вхід підключений до виходу синхронізатора.
8. Радіолокаційна система за п. 7, яка відрізняється тим, що до її складу введена третя схема керування, причому її виходи підключені до схеми призначення номера частоти, а її вхід приєднаний до виходу другої схеми керування.
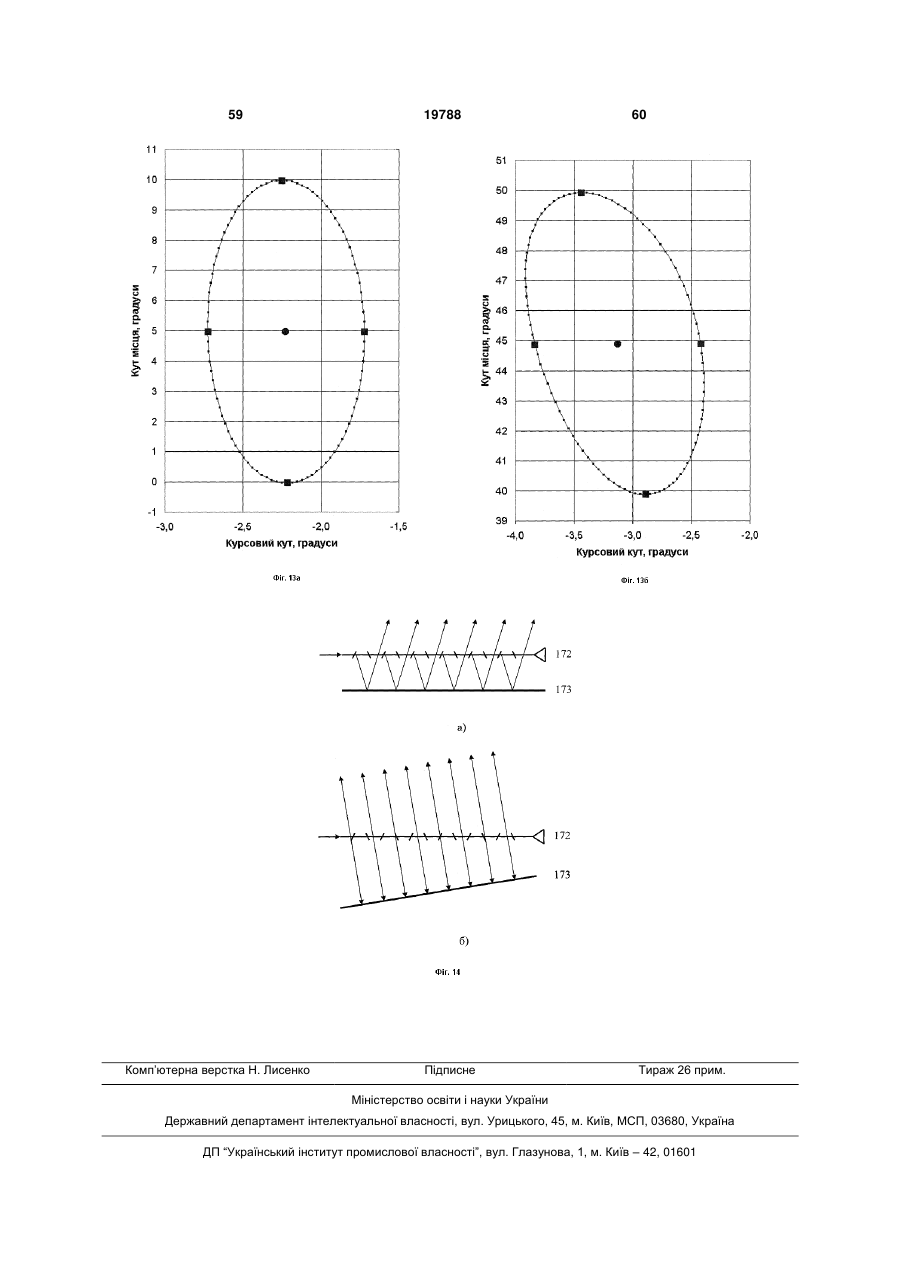
9. Радіолокаційна система за пп. 1, або 2, або 3, або 4, або 5, або 6, або 7, або 8, яка відрізняється тим, що антена виконана у вигляді дзеркальної антени з лінійним хвилевідно-щілинним випромінювачем.
10. Радіолокаційна система за п. 9, яка відрізняється тим, що вісь лінійного хвилевідно-щілинного випромінювача відхилена від твірної відбиваючої поверхні дзеркала на кут, який дорівнює куту відхилення осі променя від нормалі до випромінювача.
11. Радіолокаційна система за пп.1 або 2, або 3, або 4, або 5, або 6, або 7, або 8, або 9, або 10, яка відрізняється тим, що смуга її робочих частот лежить в межах частотного діапазону від 8 до 10 ГГц.
Текст
1. Радіолокаційна система, що містить антену, обертальні переходи за кутом місця та курсовим кутом, пристрій відліку координат, пристрій вторинної обробки, відеопроцесор, процесор керування, контролер, перший та другий пристрої керування приводам, привід повороту антени, привід обертання антени, датчик кута місця, датчик курсового кута, перший процесор обміну, приймально-передавальний пристрій, що має у своєму складі когерентний гетеродин, перший та другий стабільні гетеродини, генератор коливань частоти дискретизації, формувач тактових імпульсів, синхронізатор, формувач зондувальних сигналів, перший та другий передавальні перетворювачі частоти, перший, другий та третій передавальні підсилювачі, вихідний передавальний підсилювач, антенний перемикач, вхідний приймальний пристрій, перший та другий приймальні перетворювачі частоти, перший та другий приймальні підсилювачі, аналого-цифровий перетворювач, пристрій цифрової обробки сигналів, що має у своєму складі цифровий квадратурний генератор, перший та другий цифрові перетворювачі частоти, перший та другий фільтри децимації, перший та другий оптимальні фільтри, першу та другу схеми черезперіодної обробки, перший та другий обчислювачі швидкого перетворення Фур'є, першу та другу схеми вагової обробки, першу та другу схеми піднесення до квадрата та перший багатоканальний суматор, виявник сигналів, що має у своєму складі першу багатоканальну порогову схему, багатоканальний обчислювач порогових рівнів від завад, перший багатоканальний датчик коефіцієнтів, фільтр нульової швидкості, фільтр міжоглядового накопичення та радіолокаційну карту завад, пульт керування, що має у своєму складі центральний 2 (19) 1 3 19788 4 приймального перетворювачів частоти, виходи гатоканального суматора з порядковими номерами другого стабільного гетеродина підключені до гевід 0 до N-1 через першу багатоканальну схему теродинних входів першого передавального та затримки з'єднані з відповідними за порядковими другого приймального перетворювачів частоти, номерами сигнальними входами першої багатокавиходи формувача тактових імпульсів підключені нальної порогової схеми (тут N - розмірність швиддо тактових входів пристрою цифрової обробки кого перетворення Фур'є), другі виходи частотних сигналів, виявника сигналів, пристрою відліку коканалів першого багатоканального суматора з поординат та синхронізатора, виходи синхронізатора рядковими номерами від 0 до N-1 з'єднані із вхопідключені до входів синхронізації формувача зодами комбінаторного пристрою, (тут N - розмірндувальних сигналів, пристрою цифрової обробки ність швидкого перетворення Фур'є), перший вихід сигналів, виявника сигналів, пристрою відліку кокомбінаторного пристрою з першою фракцією часординат та вихідного передавального підсилюватотних каналів з порядковими номерами від 0 до S ча, виходи генератора коливань частоти дискретита від (N-S) до (N-1) підключені до першої схеми зації підключені до тактових входів аналоговідбору максимуму (тут N - розмірність швидкого цифрового перетворювача, цифрового квадратурперетворення Фур'є; S - половина кількості частоного генератора, першого та другого цифрових тних каналів малорухомих завад за винятком каперетворювачів частоти та першого і другого фіналу нульової швидкості), другий вихід комбінатольтрів децимації, виходи цифрового квадратурнорного пристрою з другою фракцією частотних го генератора підключені до гетеродинних входів каналів з порядковими номерами від S+1 до М-1 першого та другого цифрових перетворювачів часпідключені до другої схеми відбору максимуму (тут тоти, перший вихід аналого-цифрового перетвоМ - номінальна кількість частотних каналів у станрювача через послідовно з'єднані перший цифродартній фракції; S - половина кількості частотних вий перетворювач частоти, перший фільтр каналів малорухомих завад за винятком каналу децимації, перший оптимальний фільтр, першу нульової швидкості), третій вихід комбінаторного схему черезперіодної компенсації, перший обчиспристрою з третьою фракцією частотних каналів з лювач швидкого перетворення Фур'є, першу схему порядковими номерами від N-M до N-S-1 підклювагової обробки та першу схему піднесення до чені до третьої схеми відбору максимуму (тут N квадрата підключений до першого входу першого розмірність швидкого перетворення Фур'є; М - нобагатоканального суматора, другий вихід аналогомінальна кількість частотних каналів у стандартній цифрового перетворювача через послідовно з'єдфракції; S - половина кількості частотних каналів нані другий цифровий перетворювач частоти, друмалорухомих завад за винятком каналу нульової гий фільтр децимації, другий оптимальний фільтр, швидкості), m-й вихід комбінаторного пристрою з другу схему черезперіодної компенсації, другий m-ю фракцією частотних каналів з порядковими обчислювач швидкого перетворення Фур'є, другу номерами від [(m-3) М] до [(m-2) М-1] підключені до схему вагової обробки та другу схему піднесення m-ї схеми відбору максимуму, причому m змінюдо квадрата підключений до другого входу першоється від 4 до (N/M+1), (тут N - розмірність швидкого багатоканального суматора, вихід нульового го перетворення Фур'є; М - номінальна кількість частотного каналу першого багатоканального сучастотних каналів у стандартній фракції), виходи матора підключений до входу фільтра нульової схем відбору максимуму з'єднані зі входами відпошвидкості, а вихід останнього підключений до вховідних за порядковими номерами обчислювачів ду фільтра міжоглядового накопичення, вихід фіпоточного рівня завад, входи обчислювачів порольтра міжоглядового накопичення підключений до гових рівнів від шуму підключені до відповідних за радіолокаційної карти завад та перших входів бапорядковими номерами виходів другого багатокагатоканального обчислювача порогових рівнів від нального датчика коефіцієнтів та до виходів відпозавад, до других входів якого підключені відповідні відних за порядковими номерами обчислювачів за порядковими номерами виходи першого багапоточного рівня завад, входи обчислювача попратоканального датчика коефіцієнтів, виходи багатовок з'єднані з виходами датчика поправок, перші канального обчислювача порогових рівнів від завходи багатоканального обчислювача порогових вад підключені до відповідних за порядковими рівнів від завад підключені до виходу фільтра міномерами опорних входів першої багатоканальної жоглядового накопичення, а другі його входи підкпорогової схеми, яка відрізняється тим, що до лючені до відповідних за порядковими номерами складу виявника сигналів введені комбінаторний виходів першого багатоканального датчика коефіпристрій, перший та другий датчики параметрів цієнтів, виходи обчислювача поправок, багатоказавад, перший та другий обчислювачі номерів часнального обчислювача порогових рівнів від завад тотних каналів, другий багатоканальний датчик та обчислювачів порогових рівнів від шуму підклюкоефіцієнтів, схеми відбору максимуму, обчислючені до входів відповідних за порядковими номевачі поточного рівня завад, обчислювачі порогових рами обчислювачів підсумкового порогового рівня, рівнів від шуму, обчислювачі підсумкових пороговиходи обчислювачів підсумкових порогових рівнів вих рівнів, датчик поправок, обчислювач поправок, підключені до відповідних за порядковими номепершу багатоканальну схему затримки, другий рами опорних входів першої багатоканальної посуматор, датчик порогового рівня, другу порогову рогової схеми, перші виходи першої багатоканасхему, першу схему часового подавлення, схему льної порогової схеми підключені до входів подавлення частотних каналів, датчики меж за другого суматора, входи другої порогової схеми відстанню та за курсовим кутом, обчислювач проспідключені до виходу другого суматора та першого торових стробів, схему просторової селекції, придатчика порогового рівня, вихід другої порогової чому перші виходи частотних каналів першого басхеми підключений до керуючого входу першої 5 19788 6 схеми часового подавлення, датчики меж за відсвертого датчика коефіцієнтів, а вихід четвертого танню і за курсовим кутом та координатні виходи помножувача приєднаний до опорного входу п'ятої пристрою відліку координат підключені до входів порогової схеми, керуючий вхід другої схеми подаобчислювача просторових стробів, вихід схеми влення підключений до виходу четвертої порогової формування просторових стробів підключений до схеми, керуючий вхід третьої схеми подавлення керуючого входу схеми просторової селекції, вхопідключений до виходу п'ятої порогової схеми, ди другого обчислювача номерів частотних канавходи шостого суматора приєднані до виходів друлів з'єднані з другим датчиком параметрів завад, а гої та третьої схем подавлення, входи п'ятого помйого вихід підключений до керуючого входу схеми ножувача підключені до п'ятого датчика коефіцієнподавлення частотних каналів, другі виходи пертів та першого виходу шостого суматора, вихід шої багатоканальної порогової схеми через посліп'ятого помножувача приєднаний до другого сигдовно включені першу схему часового подавленнального входу комутатора, другий вихід шостого ня, схему подавлення частотних каналів та схему суматора підключений до входу відповідного за просторової селекції підключені до входів припорядковим номером обчислювача порогового строю відліку координат. рівня від шуму. 2. Радіолокаційна система за п. 1, яка відрізня3. Радіолокаційна система за пп. 1 або 2, яка відється тим, що до складу обчислювача поточного різняється тим, що до складу пристрою цифрової рівня завад введені перший, другий, третій, четвеобробки сигналів введені сьомий датчик коефіцієртий та п'ятий помножувачі, третій, четвертий, нтів, датчик параметрів зондувальних сигналів, п'ятий та шостий суматори, третя, четверта та датчик кутової швидкості обертання антени, датп'ята порогові схеми, друга та третя схеми затримчик ширини променя антени, датчик періоду поки, комутатор, третій, четвертий, п'ятий та шостий вторювання зондувань, обчислювач розмірності датчики коефіцієнтів, причому вихід схеми відбору перетворення та обчислювач вагових коефіцієнтів, максимуму підключений до першого входу третьопричому керуючі входи першого та другого оптиго суматора, до сигнального входу третьої порогомальних фільтрів та формувача зондувальних вої схеми та до першого сигнального входу комусигналів підключені до датчика параметрів зондутатора, перший вхід першого помножувача вальних сигналів, керуючі входи першого та другоз'єднаний з третім датчиком коефіцієнтів, а другий го фільтрів черезперіодної компенсації підключені його вхід через другу схему затримки - з першим до сьомого датчика коефіцієнтів, входи обчислювиходом третього суматора, другий вхід третього вача розмірності перетворення підключені до датсуматора підключений до виходу першого помночика кутової швидкості обертання антени, до датжувача, входи другого помножувача з'єднані з шочика ширини променя антени та до датчика стим датчиком коефіцієнтів та з другим виходом періоду повторювання зондувань, керуючі входи третього суматора, вихід другого помножувача першого та другого обчислювачів швидкого перетпідключений до керуючого входу третьої порогової ворення Фур'є та вхід обчислювача вагових коефісхеми, керуючий вхід комутатора з'єднаний з вицієнтів підключені до виходів обчислювача розмірходом третьої порогової схеми, а вихід комутатора ності перетворення, керуючі входи першої та підключений до входу третьої схеми затримки, другої схем вагової обробки підключені до виходів третя схема затримки має відгалуження через кообчислювача вагових коефіцієнтів. жний елемент розрізнення за відстанню, найбіль4. Радіолокаційна система за пп.1 або 2, або 3, яка відрізняється тим, що до складу пристрою цифший час затримки третьої схеми затримки складає рової обробки сигналів введені перша схема керуне менше ніж (2 R+V-1) елементів розрізнення за вання, третій та четвертий обчислювачі швидкого відстанню (тут R - кількість відгалужень для кожної перетворення Фур'є, перший та другий мультипленавчаючої вибірки; V - кількість відгалужень у проксори, причому перший та третій обчислювачі міжку між навчаючими вибірками), відгалуження швидкого перетворення Фур'є включені паралельтретьої схеми затримки з порядковими номерами но, другий та четвертий обчислювачі швидкого від 0 до R-1 приєднані до входів четвертого сумаперетворення Фур'є включені паралельно, виходи тора (тут R - кількість відгалужень для кожної напершого та третього обчислювачів швидкого перевчаючої вибірки), відгалуження третьої схеми затворення Фур'є підключені до входів першого мутримки з порядковими номерами від (R+V) до льтиплексора, вихід якого підключений до першої (2 R+V-1) приєднані до входів п'ятого суматора схеми вагової обробки, виходи другого та четвер(тут R - кількість відгалужень для кожної навчаючої того обчислювачів швидкого перетворення Фур'є вибірки; V - кількість відгалужень у проміжку між підключені до входів другого мультиплексора, винавчаючими вибірками), виходи четвертого сумахід якого підключений до другої схеми вагової обтора приєднані до сигнального входу другої схеми робки, керуючі входи першого, другого, третього та подавлення, першого входу третього помножувача четвертого обчислювачів швидкого перетворення та сигнального входу п'ятої порогової схеми, вихоФур'є підключені до виходів обчислювача розмірди п'ятого суматора приєднані до сигнального ності перетворення, керуючі входи мультиплексовходу третьої схеми подавлення, першого входу рів підключені до виходів першої схеми керування, четвертого помножувача та сигнального входу а її входи підключені до синхронізатора та четверчетвертої порогової схеми, другий вхід третього того виходу обчислювача розмірності перепомножувача підключений до першого виходу четтворення. вертого датчика коефіцієнтів, а вихід третього по5. Радіолокаційна система за пп.1 або 2, або 3, множувача приєднаний до опорного входу четверабо 4, яка відрізняється тим, що до складу прийтої порогової схеми, другий вхід четвертого мально-передавального пристрою введені генерапомножувача підключений до другого виходу чет 7 19788 8 тор коливань опорної частоти, перший помножульника, перший вихід третього розподільника чевач частоти як генератор коливань частоти дисрез п'яту схему часового подавлення з'єднаний з кретизації, другий помножувач частоти як когерегетеродинним входом першого передавального нтний гетеродин, перший подільник частоти як перетворювача частоти, другий вихід третього формувач коливань тактової частоти, а до складу розподільника з'єднаний з гетеродинним входом першого стабільного гетеродина введені перший другого приймального перетворювача частоти, синтезатор частоти, перший керований генератор, керуючі входи четвертої та п'ятої схем часового другий подільник частоти, схема призначення ноподавлення підключені до відповідних виходів симера частоти, перший розподільник, перший та нхронізатора. другий підсилювачі і четверта схема часового по6. Радіолокаційна система за пп. 1 або 2, або 3, або 4, або 5, яка відрізняється тим, що вихідний давлення, до складу другого стабільного гетеродина введені другий синтезатор частоти, другий передавальний підсилювач виконаний на напівпкерований генератор, другий та третій розподільровідникових підсилюючих модулях. 7. Радіолокаційна система за п. 6, яка відрізняники, третій підсилювач, п'ята схема часового поється тим, що до її складу введена друга схема давлення, причому виходи генератора коливань опорної частоти підключені відповідно до перших керування, причому її виходи підключені до синхвходів першого та другого синтезаторів частоти, ронізатора та датчика параметрів зондувальних до входів першого та другого помножувачів частосигналів, а її вхід підключений до виходу синхроніти та до входу подільника частоти, другий вхід затора. 8. Радіолокаційна система за п. 7, яка відрізняпершого синтезатора частоти з'єднаний з виходом ється тим, що до її складу введена третя схема другого подільника частоти, третій вхід першого синтезатора частоти з'єднаний із схемою признакерування, причому її виходи підключені до схеми чення номера частоти, вихід першого синтезатора призначення номера частоти, а її вхід приєднаний частоти з'єднаний зі входом першого керованого до виходу другої схеми керування. генератора, вихід якого підключений до входу 9. Радіолокаційна система за пп. 1, або 2, або 3, або 4, або 5, або 6, або 7, або 8, яка відрізняєтьпершого розподільника, перший вихід першого ся тим, що антена виконана у вигляді дзеркальної розподільника з'єднаний зі входом другого подільника частоти, другий вихід першого розподільника антени з лінійним хвилевідно-щілинним випромічерез перший підсилювач та четверту схему часонювачем. 10. Радіолокаційна система за п. 9, яка відрізнявого подавлення з'єднаний з гетеродинним входом ється тим, що вісь лінійного хвилевідно-щілинного другого передавального перетворювача частоти, третій вихід першого розподільника через другий випромінювача відхилена від твірної відбиваючої підсилювач з'єднаний з гетеродинним входом поверхні дзеркала на кут, який дорівнює куту відпершого приймального перетворювача частоти, хилення осі променя від нормалі до випровихід другого синтезатора частоти приєднаний до мінювача. входу другого керованого генератора, а вихід 11. Радіолокаційна система за пп.1 або 2, або 3, останнього з'єднаний з входом другого розподільабо 4, або 5, або 6, або 7, або 8, або 9, або 10, яка відрізняється тим, що смуга її робочих частот ника, перший вихід другого розподільника з'єднаний з другим входом другого синтезатора частоти, лежить в межах частотного діапазону від 8 до другий вихід другого розподільника через третій 10 ГГц. підсилювач з'єднаний з входом третього розподі Запропонована корисна модель під назвою "Радіолокаційна система" (РЛС) належить до класу мобільних пошукових когерентно-імпульсних радіолокаційних систем, що призначені для виявлення повітряних, наземних та надводних об'єктів, вимірювання їх координат та супроводу виявлених об'єктів, визначення їх параметрів руху та видачі даних комплексам та системам, що з нею сполучаються. Радіолокаційна система може бути використана для своєчасного виявлення небажаних об'єктів в зоні відповідальності РЛС, наприклад, при охороні важливих об'єктів (електростанцій, промислових підприємств, складських приміщень тощо), та може бути встановлена на мобільних транспортних засобах. Особливостями запропонованої РЛС є таке: випромінювання сигналів малої потужності, що забезпечує енергозбереження та зменшує екологічну шкоду навколишньому середовищу; використання високоефективних методів цифрового формування та цифрової обробки радіолокаційних сигналів та радіолокаційних даних; забезпечення високої надійності та безпечної експлуатації за рахунок широкого використання цифрових процесорів, мікроелектронних елементів високого ступеня інтеграції та потужних НВЧ напівпровідникових елементів; випромінювання сигналів з довжиною хвилі 34см, що забезпечує умови більш ефективного придушення пасивних завад та можливості використання системи при розміщенні на мобільних носіях; забезпечення обслуговуючому персоналу безпечних та комфортних умов за рахунок можливості дистанційного керування системою. Відомі радіолокаційно-телевізійний комплекс "Страж-СТ", що складається з когерентної РЛС "Кредо", програмованого цифрового процесора обробки радіолокаційних сигналів "Кредо-1" та 9 19788 10 телекамери, а також комплекс "Голотурия" з псевчастот і запам'ятовуються в буферній пам'яті. до когерентною радіолокаційною станцією КПрочитані з буферної пам'яті відліки сигналів наддіапазону, системами зв'язку, апаратурою орієнтуходять до входів квадратурних каналів трьохвання та прив'язки до місцевості, засобами життєімпульсного компенсатора пасивних завад та фізабезпечення, апаратурою передачі даних, апаральтра нульової швидкості. З виходу компенсатора турою документування цільової обстановки та відліки сигналів піддаються восьми-точковому автономним джерелом живлення ["Пограничник швидкому перетворенню Фур'є (ШПФ). Для зменсодружества", 1997, №2]. Останній має систему шення бічних пелюсток у частотному просторі випридушення завад від морської поверхні, часове користовується вагова обробка сигналів, при якій з управління підсиленням на НВЧ, систему селекції відліків вихідних сигналів кожного частотного карухомих цілей на фоні завад від земної поверхні. налу віднімаються відповідні частки відліків у суНедоліками комплексів є використання мілімеміжних частотних каналах. трового діапазону довжини хвиль, що створює В кожному частотному каналі, розраховується проблеми при вирішенні задач придушення завад, обвідна сигналу, а її відліки порівнюються у порообумовлених відбиттям сигналів від земної або говому пристрої з розрахованим пороговим рівморської поверхні та гідрометеорологічних утвонем. При перевищенні порогового рівня формурень, а також виявлення об'єктів на достатніх відсється одиничний імпульс, який передається в танях через велике питоме поглинання радіохвиль пристрій обробки даних. Пороговий рівень врахояк у чистій атмосфері, так і при наявності туманів, вує середній рівень завад у відповідному елементі дощових та снігових опадів ["Справочник по радирозрізнення радіолокаційної карти завад. олокации" під редакцією М.Сколніка. В 4-х томах. Для побудови радіолокаційної карти завад від Переклад з англійської. Москва, видавництво "Сомісцевих предметів використовується рекурсивна ветское радио", 1978]. фільтрація. Реєстрація рівня завад жорстко приВідомі трикоординатні радіолокаційні станції в'язується до координат "курсовий кут антени AN/SPS-48, AN/SPS-52 (USA) [Jane's Weapon віддаль від РЛС". При кожному поточному огляді Systems 1987-88, pp.686-687], "Фрегат-МАЄ" (Роодна восьма вихідних відліків фільтра нульової сія) [Военный парад, 1997, №5, ст.94-96; Военный швидкості додається до семи восьмих вже накопипарад, 1998, №6, ст.60-61] та РЛС [за деклараційчених відліків карти завад. Стале середнє значенним патентом України 43975А від 15.01.2002 року], ня відліків карти завад формується за 10-20 огляякі здійснюють пошук та виявлення цілей та видадів. Для підвищення точності використовується чу даних цілевказівок комплексам та системам, що досить дрібна сітка елементів розрізнення карти з ними сполучаються. Пошук такими РЛС по азизавад. Відліки карти завад множать на константу муту здійснюється шляхом механічного обертання та використовують при формуванні порогових рівантени навколо вертикальної осі, а по куту місця ней в кожному частотному каналі. Для фільтра за рахунок електронного сканування променем нульової швидкості константа дорівнює 4-8, для шляхом зміни несучої частоти або несучої частоти інших частотних каналів константи відповідно зміта фази випромінюваних зондувальних сигналів. нюються. Антенні пристрої перелічених систем являють соПотім на другій частоті повторювання випробою ряд лінійних хвилеводно-щілинних випромімінюються 8 зондувальних сигналів. Прийняті сигнювачів. Випромінювачі живляться через відгалунали зазнають обробки, яка аналогічна обробці ження від хвилеводної уповільнюючої системи при випромінюванні 10 зондувальних сигналів на безпосередньо або через фазообертачі з електпершій частоті повторювання. ронним управлінням. Такий режим випромінювання й обробки сигВідома також радіолокаційна система ASR-9 з налів безперервно повторюється. цифровим виявником рухомих цілей ["Применение Недоліками РЛС є складність антенних сисцифровой обработки сигналов". Переклад з ангтем, велика потужність випромінюваних сигналів, лійської під редакцією А.М.Рязанцева. Москва, велика вартість, велика споживана енергія від видавництво "Мир", 1980, стор.346-351, а також джерел електропостачання, великі розміри й вага. ТИИЭР, т.73, № 2, лютий 1985], який має у своєму Все це практично не дає можливості розміщення складі послідовно включені комплексний аналогоРЛС на мобільних засобах пересування. цифровий перетворювач, оперативну буферну Найбільш близькою за технічною суттю до запам'ять, комплексний трьох-імпульсний через пепропонованої корисної моделі є РЛС, яка обрана в ріодний компенсатор, пристрій восьми-точкового якості аналога і до складу якої належать такі сутшвидкого перетворення Фур'є, пристрій розрахунтєві пристрої: ку обвідної сигналу, пристрій порогового аналізу, а антенна, привід обертання антени навколо ветакож фільтр нульової швидкості, рекурсивний ртикальної вісі; фільтр формування карти завад та запам'ятовуюпривід зміни кута місця вісі променя антени; чий пристрій карти завад. пристрої управління приводами антени; РЛС працює почергово на двох частотах поконтролер; вторювання зондувань. датчики положення вісі променя антени по куПрийняті сигнали на кожній частоті повторюрсовому куту та куту місця; вання обробляються окремо. НВЧ обертальні переходи по куту місця та куСпочатку на першій частоті повторювання вирсовому куту; промінюються 10 зондувальних сигналів. Прийняті когерентний приймально-передавальний присигнали зазнають аналого-цифрового перетворенстрій; ня у двох квадратурних каналах до відео смуги фільтр черезперіодної компенсації; 11 19788 12 пристрій когерентної обробки сигналів; виявформування та обробки радіолокаційних сигналів ник сигналів; та напівпровідникової техніки підсилення зондувапристрій відліку координат позначок цілей; льних НВЧ сигналів. пристрій вторинної обробки радіолокаційних даДля досягнення цієї мети пропонується виконих; ристати низку додаткових істотних ознак шляхом процесор управління; введення до складу корисної моделі певних придистанційний пульт управління та відображенстроїв та забезпечення відповідних зв'язків між ня з центральним процесором управління; проценими та іншими пристроями корисної моделі. сор обміну. Суть корисної моделі полягає у такому. Пошук по азимуту ведеться шляхом механічВідповідно до пункту 1 формули корисної ного обертання антени навколо вертикальної вісі, моделі підвищення ефективності РЛС забезпечупошук по куту місця здійснюється за рахунок меється за рахунок вдосконалення пристроїв цифроханічної зміни кута місця вісі променя антени. вої обробки сигналів. Прийняті сигнали зазнають когерентної обробДо складу корисної моделі належать пристрої, ки, накопичуються та порівнюються з програмне які аналогічні пристроям аналога: антена; обертавстановленим пороговим рівнем. З виявлених сигльні переходи по куту місця та курсовому куту; налів формуються позначки об'єктів та визначапристрій відліку координат; пристрій вторинної ються їх координати. Координати виявлених позобробки; відеопроцесор; процесор управління; начок передаються до пристрою вторинної контролер; перший та другий пристрої управління обробки, де виявлені об'єкти беруться на супровід, приводами; привод повороту антени; привод обера їх координати згладжуються та екстраполюються тання антени; датчики кута місця та курсового кудля забезпечення визначення поточних координат та; перший процесор обміну; та параметрів руху об'єктів, що супроводжуються. приймально-передавальний пристрій, що має Отримані дані видаються комплексам і системам, у своєму складі: когерентний гетеродин; перший та що сполучаються з РЛС, та відображаються на другий стабільні гетеродини; генератор коливань екранах індикаторів разом з первинною радіолочастоти дискретизації; формувач тактових імпулькаційною обстановкою. сів; синхронізатор; формувач зондувальних сигнаАналогу (прототипу) корисної моделі та перелів; перший та другий передавальні перетворювачі ліченим вище системам притаманні деякі суттєві частоти; перший, другий та третій передавальні недоліки, а також особливості, які істотно обмежупідсилювачі; вихідний передавальний підсилювач; ють їх ефективність або можливість їх використанантенний перемикач; вхідний приймальний приня при розміщенні на мобільних транспортних застрій; перший та другий приймальні перетворювачі собах: частоти; перший та другий приймальні підсилювавелика зона дії за відстанню вимагає викорисчі; аналого-цифровий перетворювач; тання тривалих інтервалів між суміжними зондупристрій цифрової обробки сигналів, що має у ваннями, обмежує кількість сигналів від об'єкта й своєму складі: цифровий квадратурний генератор; суттєво обмежує можливості ефективного одночаперший та другий цифрові перетворювачі частоти; сного придушення завад різного походження; перший та другий фільтри децимації; перший та відсутність ефективного захисту від імпульсдругий оптимальні фільтри; першу та другу схеми них завад приводить до уразливості системи зончерезперіодної обробки; перший та другий обчисдувальними сигналами сусідніх РЛС, суттєво збілювачі швидкого перетворення Фур'є; першу та льшує кількість хибних виявлень та може другу схеми вагової обробки; першу та другу схепридушувати значну частину зони дії системи; ми піднесення до квадрату та перший (багатокапрактична неможливість ефективного одночанальний) суматор; сного придушення спектрально багатогорбих завиявник сигналів, що має у своєму складі: певад (наприклад, завад від земної поверхні та доршу (багатоканальну) порогову схему; (багатокащових крапель) через обмежену кількість сигналів нальний) обчислювач порогових рівнів від завад; та неповну їх когерентність; велика потужність перший (багатоканальний) датчик коефіцієнтів; зондувальних сигналів може спричинити ураження фільтр нульової швидкості; фільтр міжоглядового персоналу електромагнітними або рентгенівськинакопичення та радіолокаційну карту завад; ми випромінюваннями та привести до інтенсивних пульт управління, що має у своєму складі: взаємних завад; центральний процесор; пристрій відображення; використання електровакуумних НВЧ та модуманіпулятор та другий процесор обміну. ляторних приладів у вихідних передавальних підПоставлена мета досягається тим, що до силювачах суттєво погіршує експлуатаційну надійскладу виявника корисної моделі введено такі доність та безпечну експлуатацію системи. даткові пристрої: Метою запропонованої корисної моделі є усукомбінаторний пристрій; перший та другий данення перелічених та деяких інших недоліків та тчики параметрів завад; перший та другий обчисістотне покращання характеристик радіолокаційної лювачі номерів частотних каналів; другий (багатосистеми. канальний) датчик коефіцієнтів; схеми відбору В основу корисної моделі покладено створенмаксимуму; обчислювачі поточного рівня завад; ня радіолокаційної системи з випромінюваннями обчислювачі порогових рівнів від шуму; обчислюневеликої потужності, використання режимів обвачі підсумкових порогових рівнів; датчик поправок робки сигналів підвищеної ефективності в умовах та обчислювач поправок; першу (багатоканальну) одночасної дії завад різного походження, застосусхему затримки; другий суматор; датчик порогововання нових цифрових принципів та пристроїв го рівня; другу порогову схему; першу схему часо 13 19788 14 вого придушення; обчислювач просторових стро(багатоканального) обчислювача порогових рівнів бів; схему просторової селекції; схему придушення від завад підключено до виходу фільтра міжоглячастотних каналів; датчики меж по відстані та по дового накопичення, а другі його входи підключені курсовому куту; датчики поточної відстані та потодо відповідних за порядковими номерами виходів чного курсового кута; першого (багатоканального) датчика коефіцієнтів; та введено такі зв'язки між ними та іншими виходи обчислювача поправок, (багатоканального) пристроями РЛС: перші виходи частотнихканалів обчислювача порогових рівнів від завад та обчиспершого (багатоканального) суматора з порядколювачів порогових рівнів від шуму підключені до вими номерами від 0 до (N-1) через першу (багавходів відповідних за порядковими номерами обтоканальну) схему затримки з'єднані з відповідничислювачів підсумкових порогових рівнів; виходи ми за порядковими номерами сигнальними обчислювачів підсумкових порогових рівнів підквходами першої (багатоканальної) порогової схелючені до відповідних за порядковими номерами ми, опорних входів першої (багатоканальної) порого(тут N - розмірність швидкого перетворення вої схеми; перші виходи першої (багатоканальної) Фур'є); порогової схеми підключено до входів другого судругі виходи частотних каналів першого (багаматора; входи другої порогової схеми підключено токанального) суматора з порядковими номерами до виходу другого суматора та датчика порогового від 0 до (N-1) з'єднані зі входами комбінаторного рівня; вихід другої порогової схеми підключено до пристрою, керуючого входу першої схеми часового приду(тут N - розмірність швидкого перетворення шення; входи обчислювача просторових стробів Фур'є); з'єднано з датчиком меж по відстані; з датчиком перший вихід комбінаторного пристрою з пермеж по курсовому куту; з датчиками поточних кошою фракцією частотних каналів з порядковими ординат відстані та курсового кута; вихід схеми номерами від 0 до S та від (N-S) до (N-1) підклюформування просторових стробів підключено до чено до першої схеми відбору максимуму, (тут N керуючого входу схеми просторової селекції; вхорозмірність швидкого перетворення Фур'є; ди другого обчислювача номерів частотних канаS - половина кількості частотних каналів малів з'єднано з другим датчиком параметрів завад, лорухомих завад за винятком каналу нульової а його вихід підключено до керуючого входу схеми швидкості); придушення частотних каналів; другі виходи пердругий вихід комбінаторного пристрою з друшої (багатоканальної) порогової схеми через посгою фракцією частотних каналів з порядковими лідовно включені першу схему часового придуномерами від (S+ 1) до (М- 1) підключено до другої шення, схему придушення частотних каналів та схеми відбору максимуму, схему просторової селекції підключені до входів (тут М - номінальна кількість частотних каналів пристрою відліку координат. у стандартній фракції; Використання сукупності перелічених істотних S - половина кількості частотних каналів маознак дозволяє: суттєво збільшити захищеність від лорухомих завад за винятком каналу нульової нерухомих завад (наприклад, завад від земної швидкості); поверхні); забезпечити захищеність від рухомих третій вихід комбінаторного пристрою з трезавад (наприклад, завад від дощових крапель); тьою фракцією частотних каналів з порядковими істотно збільшити захищеність при одночасній дії номерами від (N-M) до (N-S-1) підключено до трерухомих та нерухомих завад (наприклад, завад від тьої схеми відбору максимуму, дощових крапель та земної поверхні); забезпечити (тут N- розмірність швидкого перетворення захист від імпульсних завад (наприклад, від сигнаФур'є; лів сусідніх РЛС); стабілізувати частість хибних М - номінальна кількість частотних каналів у виявлень сигналів у присутності пасивних та імпустандартній фракції; льсних завад; підвищити ймовірність вірного виявS - половина кількості частотних каналів малення об'єктів на фоні пасивних та імпульсних лорухомих завад за винятком каналу нульової завад; спростити апаратурну реалізацію багатокашвидкості); нальної цифрової обробки сигналів. m-ий вихід комбінаторного пристрою з m-ою Захищеність від нерухомих завад (наприклад, фракцією частотних каналів з порядковими номезавад від земної поверхні) забезпечується за рарами від [(m -3)*М] до [(m -2)*М-1] підключено до хунок відключення малошвидкісних частотних каm-ої схеми відбору максимуму, причому m змінюналів, причому кількість таких каналів та їх розтається від 4 до (N/M+1), (тут N - розмірність швидкошування у частотному просторі визначається го перетворення Фур'є; першим обчислювачем номерів частотних каналів М - номінальна кількість частотних каналів у за даними першого датчика параметрів завад; для стандартній фракції); виходи схем відбору максибільшого придушення нерухомих завад можливо муму з'єднані зі входами відповідних за порядкотакож одночасне використання схем черезперіодвими номерами обчислювачів поточного рівня заної компенсації. вад; входи обчислювачів порогових рівнів від шуму Захищеність від рухомих завад (наприклад, підключені до відповідних за порядковими номезавад від дощових крапель) забезпечується за рами виходів другого (багатоканального) датчика рахунок відключення відповідних швидкісних часкоефіцієнтів та до виходів відповідних за порядкототних каналів, причому кількість таких каналів та вими номерами обчислювачів поточного рівня заїх розташування у частотному просторі визначавад; входи обчислювача поправок з'єднано з виється другим обчислювачем номерів частотних ходами датчика поправок; перші входи 15 19788 16 каналів за даними другого датчика параметрів V - кількість відгалужень у прогалині між назавад. вчаючими вибірками); Захищеність від імпульсних завад (наприклад, виходи четвертого суматора приєднані до сигназавад від сусідніх РЛС) забезпечується за рахунок льного входу другої схеми придушення, першого обчислення кількості одночасно виявлених сигнавходу третього помножувача та сигнального входу лів у різних частотних каналах за допомогою друп'ятої порогової схеми; виходи п'ятого суматора гого суматора, порівняння обчисленої суми з встаприєднані до сигнального входу третьої схеми новленим пороговим рівнем у другій пороговій придушення, першого входу четвертого помножусхемі, та в разі, якщо обчислена сума перевищує вача та сигнального входу четвертої порогової встановлений поріг, придушення вихідних сигналів схеми; другий вхід третього помножувача підклюза допомогою першої схеми часового придушення. чено до першого виходу четвертого датчика коеСтабілізація частості хибних виявлень сифіцієнтів, а вихід помножувача - до опорного входу гналів та підвищення ймовірності вірного виявленчетвертої порогової схеми; другий вхід четвертого ня об'єктів у присутності пасивних та імпульсних помножувача підключено до другого виходу четзавад забезпечується за рахунок більш точного вертого датчика коефіцієнтів, а вихід помножувача визначення порогових рівнів у фракціях частотних - до опорного входу п'ятої порогової схеми; керуюканалів у присутності пасивних та імпульсних зачий вхід другої схеми придушення підключено до вад. виходу четвертої порогової схеми; керуючий вхід Спрощення апаратурної реалізації багатокатретьої схеми придушення підключено до виходу нальної цифрової обробки сигналів досягається за п'ятої порогової схеми; входи шостого суматора рахунок обчислення порогових рівнів в межах приєднані до виходів другої та третьої схем приокремих фракцій частотних каналів. душення; входи п'ятого помножувача підключено Підвищення ефективності РЛС за рахунок до п'ятого датчика коефіцієнтів та першого виходу вдосконалення пристроїв обчислення порогових шостого суматора; вихід п'ятого помножувача прирівнів згідно з пунктом 2 формули корисної моделі єднано до другого сигнального входу комутатора; досягається тим, що до складу РЛС введено такі другий вихід шостого суматора підключено до додаткові пристрої: перший, другий, третій, четвевходу відповідного за порядковим номером обчисртий та п'ятий помножувачі; третій, четвертий, лювача порогових рівнів від шуму. п'ятий та шостий суматори; третя, четверта та Використання сукупності перелічених істотних п'ята порогові схеми; друга та третя схеми затримознак дозволяє: суттєво зменшити тривалість пеки; комутатор; третій, четвертий, п'ятий та шостий рехідного процесу при різкій зміні рівня завад у датчики коефіцієнтів; та введено такі зв'язки між просторі; підвищити точність обчислення порогоними та іншими пристроями РЛС: вихід першої вого рівня у присутності близько розташованих схеми відбору максимуму підключено до першого інших об'єктів; підвищити ймовірність виявлення входу третього суматора, до сигнального входу близько розташованих об'єктів. третьої порогової схеми та до першого сигнальноЗменшення тривалості перехідного процесу го входу комутатора; перший вхід першого помнопри різкій зміні рівня завад у просторі забезпечужувача з'єднано з третім датчиком коефіцієнтів, а ється за рахунок поточного порівняння обчисленодругий його вхід через другу схему затримки підкго рівня завад у випереджувальній та відстаючій лючено до першого виходу третього суматора; навчальних вибірках та вибору більшого рівня при другий вхід третього суматора підключено до випевному співвідношенні обчислених рівнів завад. ходу першого помножувача; входи другого помноПідвищення точності обчислення порогожувача з'єднані з шостим датчиком коефіцієнтів та вого рівня у присутності близько розташованих з другим виходом третього суматора; вихід другого інших об'єктів та збільшення ймовірності виявленпомножувача підключено до керуючого входу треня близько розташованих об'єктів забезпечується тьої порогової схеми; керуючий вхід комутатора поточним порівнянням рівня завад у кожному елез'єднано з виходом третьої порогової схеми; а вименті розрізнення РЛС з обчисленим в межах нахід комутатора підключено до входу третьої схеми вчальних вибірок середнім рівнем завад та, якщо затримки; третя схема затримки має відгалуження рівень в елементі суттєво перевищує обчислений через кожний елемент розрізнення по відстані; середній рівень, заміною рівня завад у такому найбільший час затримки третьої схеми затримки елементі на обчислений середній рівень. складає (2*R+V-1) елементів розрізнення за відсПідвищення ефективності РЛС за рахунок танню, вдосконалення пристрою цифрової обробки сиг(тут R - кількість відгалужень для кожної наналів згідно з пунктом 3 формули корисної моделі вчаючої вибірки; досягається тим, що до складу РЛС введено такі V- кількість відгалужень у прогалині між надодаткові пристрої: сьомий датчик коефіцієнтів; вчаючими вибірками); відгалуження третьої схеми датчик параметрів зондувальних сигналів; датчик затримки з порядковими номерами від 0 до (R-1) кутової швидкості обертання антени; датчик шириприєднані до входів четвертого суматора, ни променя антени; датчик періоду повторювання (тут R - кількість відгалужень для кожної назондування; обчислювач розмірності перетворенвчаючої вибірки); відгалуження третьої схеми заня та обчислювач вагових коефіцієнтів; та введено тримки з порядковими номерами від (R+V) до такі зв'язки між ними та іншими пристроями РЛС: (2*7R+V-1) приєднані до входів п'ятого суматора, керуючі входи першого та другого оптимальних (тут R - кількість відгалужень для кожної нафільтрів та формувача зондувальних сигналів підвчаючої вибірки; ключені до датчика параметрів зондувальних сигналів; керуючі входи першого та другого фільтрів 17 19788 18 черезперіодної компенсації підключені до сьомого тання більш ефективних пристроїв та обчислювадатчика коефіцієнтів; входи обчислювача розмірльних процедур обробки. ності перетворення підключені до датчика кутової Підвищення ефективності цифрової обробки швидкості обертання антени, до датчика ширини сигналів забезпечується почерговим використанпроменя антени та до датчика періоду повторюням паралельно включених обчислювачів швидковання зондувань; керуючі входи першого та другого перетворення Фур'є та використанням більш го обчислювачів швидкого перетворення Фур'є та ефективних алгоритмів поточного обчислення певхід обчислювача вагових коефіцієнтів підключено ретворення Фур'є. до виходів обчислювача розмірності перетворенПідвищення ефективності РЛС за рахунок ня; керуючі входи першої та другої схем вагової вдосконалення пристроїв, що забезпечують повну обробки підключено до виходів обчислювача вагокогерентність РЛС згідно з пунктом 5 формули вих коефіцієнтів. корисної моделі досягається тим, що до складу Використання сукупності перелічених істотних РЛС введено такі додаткові пристрої: генератор ознак дозволяє суттєво підвищити ефективність коливань опорної частоти; перший помножувач цифрової обробки сигналів за рахунок можливості частоти в якості генератора коливань частоти диспрограмної зміни параметрів зондувальних сигнакретизації; другий помножувач частоти в якості лів та параметрів фільтрів, які здійснюють їх оброкогерентного гетеродина; перший подільник частобку. ти в якості формувача коливань тактової частоти; Програмна зміна параметрів сигналів забезпедо складу першого стабільного гетеродина введечується за даними датчика параметрів зондувально: перший синтезатор частоти; перший керований них сигналів, який задає параметри сигналів та генератор; другий подільник частоти; схему призпараметри відповідних оптимальних фільтрів. начення номера частоти; перший розподілювач; Програмна зміна розмірності швидкого перетперший та другий підсилювачі; четверту схему ворення Фур'є забезпечується обчислювачем розчасового придушення; до складу другого стабільмірності перетворення з використанням поточних ного гетеродина введено: другий синтезатор часданих про період повторювання зондувань, кутову тоти; другий керований генератор; другий та третій швидкість обертання антени та ширину променя розподілювачі; третій підсилювач; п'яту схему чаантени по курсовому куту та з відповідною синхсового придушення; та введено такі зв'язки між ронною зміною параметрів вагової обробки сигнаними та іншими пристроями РЛС: виходи генералів. тора коливань опорної частоти підключено відпоПрограмна зміна коефіцієнтів фільтрів чевідно до перших входів першого та другого синтерезперіодної компенсації з урахуванням поточної заторів частоти, до входів першого та другого завадової обстановки забезпечує можливість як помножувачів частоти та до входу подільника часадаптивної зміни параметрів, так і повного відклютоти; другий вхід першого синтезатора частоти чення фільтрів черезперіодної компенсації. з'єднано з виходом другого подільника частоти; Підвищення ефективності РЛС за рахунок третій вхід першого синтезатора частоти з'єднано вдосконалення пристрою цифрової обробки сигзі схемою призначення номера частоти; вихід налів згідно з пунктом 4 формули корисної моделі першого синтезатора частоти з'єднано зі входом досягається тим, що до складу РЛС введено такі першого керованого генератора; вихід якого підкдодаткові пристрої: першу схему управління; трелючено до входу першого розподілювача; перший тій та четвертий обчислювачі швидкого перетвовихід першого розподілювача з'єднано зі входом рення Фур'є, перший та другий мультиплексори; та другого подільника частоти; другий вихід першого введено такі зв'язки між ними та іншими пристророзподілювача через перший підсилювач та четями РЛС: перший та третій обчислювачі швидкого верту схему часового придушення з'єднано з гетеперетворення Фур'є включено паралельно; другий родинним входом другого передавального перетта четвертий обчислювачі швидкого перетворення ворювача частоти; третій вихід першого Фур'є включено паралельно; виходи першого та розподілювача через другий підсилювач з'єднано з третього обчислювачів швидкого перетворення гетеродинним входом першого приймального пеФур'є підключено до входів першого мультиплекретворювача частоти; вихід другого синтезатора сора, вихід якого підключено до першої схеми вачастоти приєднано до входу другого керованого гової обробки; виходи другого та четвертого обчигенератора, а вихід останнього з'єднано зі входом слювачів швидкого перетворення Фур'є другого розподілювача; перший вихід другого розпідключено до входів другого мультиплексора, поділювача з'єднано з другим входом другого синвихід якого підключено до другої схеми вагової тезатора частоти; другий вихід другого розподілюобробки; керуючі входи першого, другого, третього вача через третій підсилювач з'єднано зі входом та четвертого обчислювачів швидкого перетвотретього розподілювача; перший вихід третього рення Фур'є підключено до виходів обчислювача розподілювача через п'яту схему часового придурозмірності перетворення; керуючі входи першого шення з'єднано з гетеродинним входом першого та другого мультиплексорів підключено до виходів передавального перетворювача частоти; другий першої схеми управління, а її входи підключено до вихід третього розподілювача з'єднано з гетеросинхронізатора та четвертого виходу обчислювача динним входом другого приймального перетворюрозмірності перетворення. вача частоти; керуючі входи четвертої та п'ятої Використання сукупності перелічених істотних схем часового придушення підключено до відповіознак дозволяє суттєво підвищити ефективність дних виходів синхронізатора. цифрової обробки сигналів за рахунок викорисВикористання сукупності перелічених істотних ознак дозволяє суттєво підвищити ефективність 19 19788 20 цифрової обробки сигналів за рахунок викорис2 - пристрій цифрової обробки сигналів; 5 - виявтання повної когерентності системи. ник сигналів; 6 - пристрій відліку координат; 7 Підвищення ефективності цифрової обробки пристрій вторинної обробки; 8 - відеопроцесор; 9 сигналів за рахунок використання повної когерентпроцесор управління; 10 - контролер; 11 - перший ності системи досягається за рахунок створення пристрій управління приводом; 12- другий пристрій основних коливань в РЛС від одного високостабіуправління приводом; 13 - привод повороту антельного генератора коливань опорної частоти з ни; 14 - привод обертання антени; 15 - датчик кута використанням високостабільних синтезаторів місця; 16 - датчик курсового кута; 17 - перший прокогерентних коливань високої та надвисокої частоцесор обміну; 18 - пульт управління; 19 - другий ти. процесор обміну; 20 - центральний процесор; 21 Підвищення ефективності РЛС за рахунок відпристрій відображення; 22 - маніпулятор; 23 - вхід мови у використанні електровакуумних приладів у для даних датчика крену платформи; 24 - вхід для передавальних підсилювачах згідно з пунктом 6 даних датчика тангажу платформи; 25 - вхід для формули корисної моделі досягається тим, що даних датчика кута відхилення вісі платформи від вихідний передавальний підсилювач виконано на напрямку на північ; 26 - вхід для даних датчика напівпровідникових підсилювальних модулях. координат місця розташування платформи; 27Підвищення ефективності РЛС за рахунок вихід даних для комплексів та систем, що сполузменшення мертвої зони згідно з пунктом 7 форчаються з РЛС. мули корисної моделі досягається за рахунок ввеФігура 2. Розгорнута блок-схема аналога дення додаткової другої схеми управління та відприймально-передавального пристрою. На фігурі повідних її зв'язків з іншими пристроями РЛС, які 2 прийняті такі позначення: 4-2 - пристрій цифрозабезпечують багаторежимну роботу РЛС. вої обробки сигналів; 28 - перший стабільний гетеПідвищення ефективності багаторежимної рородин; 29 - когерентний гетеродин; 30 - формувач боти РЛС згідно з пунктом 8 формули корисної тактових імпульсів; 31 - генератор коливань частомоделі досягається за рахунок введення додаткоти дискретизації; 32 - другий стабільний гетеродин; вої третьої схеми управління та відповідних її зв'я33 - синхронізатор; 34 - формувач зондувальних зків з іншими пристроями РЛС, які забезпечують сигналів; 35 - перший передавальний підсилювач; взаємно безперешкодну роботу в різних режимах 36 - перший передавальний перетворювач частошляхом використання різних частот при пошуку в ти; 37 - другий передавальний підсилювач; 38 дальній та ближній зонах. другий передавальний перетворювач частоти; 39 Підвищення ефективності та мобільності РЛС третій передавальний підсилювач; 40 - вихідний згідно з пунктом 9 формули корисної моделі досяпередавальний підсилювач; 41 -антенний перемигається за рахунок використання легкої конструкції кач; 42 - вхідний приймальний пристрій; 43 - пердзеркальної антени з лінійним хвилєводноший приймальний перетворювач частоти; 44 - пещілинним випромінювачем та відбиваючою поверрший приймальний підсилювач; 45 - другий хнею дзеркала у вигляді вирізки параболічного приймальний перетворювач частоти; 46- другий циліндру. приймальний підсилювач; 47 - аналого-цифровий Підвищення ефективності РЛС за рахунок перетворювач. вдосконалення конструкції формування променя Фігура 3. Розгорнута блок-схема аналога приантени згідно з пунктом 10 формули корисної мострою цифрової обробки сигналів. На фігурі 3 приделі досягається тим, що антена РЛС виконана у йняті такі позначення: 49 - цифровий квадратурний вигляді дзеркальної антени з лінійним хвилєводногенератор; 50 - перший (багатоканальний) сумащілінним опромінювачем, а вісь останнього відхитор; 51 - перший цифровий перетворювач частоти; лено від твірної відбиваючої поверхні дзеркала на 52 - другий цифровий перетворювач частоти; 53 кут, який дорівнює куту відхилення вісі променя від перший фільтр децимації; 54 - другий фільтр денормалі до опромінювача. цимації; 55 - перший оптимальний фільтр; 56 Підвищення ефективності РЛС згідно з пункдругий оптимальний фільтр; 57 - перша схема четом 11 формули корисної моделі досягається тим, резперіодної компенсації; 58 - друга схема черезщо з урахуванням впливу завад, поглинання в атперіодної компенсації; 59 - перший обчислювач мосфері та припустимості геометричних розмірів швидкого перетворення Фур'є; 60 - другий обчисантени для мобільної радіолокаційної системи лювач швидкого перетворення Фур'є; 61- перша вибрано діапазон частот від 8 до 10ГГц. схема вагової обробки; 62- друга схема вагової Перелічені вдосконалення мають єдину мету: обробки; 63 - перша схема піднесення до квадрапідвищення ефективності корисної моделі за рахуту; 64 - друга схема піднесення до квадрату. нок введення додаткових істотних ознак, які забезФігура 4. Блок-схема аналога виявника сигнапечують покращання способів формування та облів. На фігурі 4 прийняті такі позначення: 65 робки сигналів, програмне керування режимами фільтр нульової швидкості; 66 - фільтр міжоглядороботи та їх адаптацію до поточних умов функціового накопичення; 67 - (багатоканальний) обчиснування. лювач порогових рівнів від завад; 68 - радіолокаСуть корисної моделі ілюструється фігурами ційна карта завад; 69 - перший (багатоканальний) креслень. датчик коефіцієнтів; 70 - перша (багатоканальна) Фігура 1. Блок-схема РЛС - аналога (прототипорогова схема. пу) корисної моделі. На фігурі 1 прийняті такі позФігура 5. Блок-схема вдосконаленого виявника начення: 1 - антена; 2 - обертальний перехід по сигналів. На фігурі 5 прийнятітакі позначення: 6 куту місця; 3 - обертальний перехід по курсовому пристрій відліку координат; 65 - фільтр нульової куту; 4-1 - приймально-передавальний пристрій; 4швидкості; 66 - фільтр міжоглядового накопичення; 21 19788 22 67 - (багатоканальний) обчислювач порогових рівперетворення Фур'є; 61 - перша схема вагової обнів від завад; 68 - радіолокаційна карта завад; 69 робки; 62 - друга схема вагової обробки; 132 - пеперший (багатоканальний) датчик коефіцієнтів; 70 рша схема управління; 138- обчислювач розмірно- перша (багатоканальна) порогова схема; 71 сті перетворення; 139 - обчислювач вагових комбінаторний пристрій; 72 - перший обчислювач коефіцієнтів; 141 - третій обчислювач швидкого номерів частотних каналів; 73 - перший датчик перетворення Фур'є; 142 - четвертий обчислювач параметрів завад; (74-78) - схеми відбору максишвидкого перетворення Фур'є; 143 - перший мульмуму; (79-83) - обчислювачі поточного рівня завад; типлексор; 144 - другий мультиплексор. 84 - другий (багатоканальний) датчик коефіцієнтів; Фігура 9. Часовий розклад роботи обчислюва(85-89) - обчислювачі порогових рівнів від шуму; чів швидкого перетворення Фур'є. На фігурі 9 при(90-94) - обчислювачі підсумкових порогових рівйняті такі позначення: 132/1 - команди другої схенів; 95 - обчислювач поправок; 96 - датчик попрами управління на підключення перших входів вок; 97 - перша (багатоканальна) схема затримки; мультиплексорів 143 та 144 до їх виходів; 132/298 - другий суматор; 99 - друга порогова схема; команди другої схеми управління на підключення 100 - перша схема часового придушення; 101 других входів мультиплексорів 143 та 144 до їх перший датчик порогового рівня; 102 - схема просвиходів; 59 - часові інтервали роботи першого обторової селекції; 103- обчислювач просторових числювача поточного ШПФ 59; 60 -часові інтервастробів; 104- другий датчик параметрів завад; 105ли роботи другого обчислювача поточного ШПФ другий обчислювач номерів частотних каналів; 106 60; 141 - часові інтервали роботи третього обчис- схема придушення частотних каналів; 107 - датлювача поточного ШПФ 141; 142 - часові інтервали чик меж зон по відстані; 108 - датчик меж зон по роботи четвертого обчислювача поточного ШПФ курсовому куту. 142; 143/1(59) - сигнали на виході мультиплексера Фігура 6. Блок-схема вдосконаленого обчис143 від першого обчислювача ШПФ 59; 144/1(60) лювача поточного рівня завад. На фігурі 6 прийнясигнали на виході мультиплексера 144 від другого ті такі позначення: 111 - третій датчик коефіцієнтів; обчислювача ШПФ 60; 143/2(141) - сигнали на ви112 - перший помножувач; 113 - третій суматор; ході мультиплексера 143 від третього обчислюва114 - друга схема затримки; 115 - другий помножуча ШПФ 141; 144/2(142) - сигнали на виході мульвач; 116 - шостий датчик коефіцієнтів; 117 - третя типлексера 144 від четвертого обчислювача ШПФ порогова схема; 118 - комутатор; 119 - п'ятий дат142; n - кількість зондувань в одиницях розмірності чик коефіцієнтів; 120 - п'ятий помножувач; 121 ШПФ N; товстими вертикальними відрізками позшостий суматор; 122- третя схема затримки; 123 начено моменти обнуління обчислювачів ШПФ. четвертий суматор; 124 - п'ятий суматор; 125 Фігура 10. Блок-схема вдосконаленого прийтретій помножувач; 126- четвертий помножувач; мально-передавального пристрою. На фігурі 10 127 - друга схема придушення; 128 - третя схема прийняті такі позначення: 4-2 - пристрій цифрової придушення; 129 - четверта порогова схема; 130 обробки сигналів; 33 - синхронізатор; 34 - формуп'ята порогова схема; 131 - четвертий датчик коевач зондувальних сигналів; 35 - перший передавафіцієнтів. льний підсилювач; 36 - перший передавальний Фігура 7. Блок-схема вдосконаленого приперетворювач частоти; 37 - другий передавальний строю цифрової обробки сигналів. На фігурі 7 припідсилювач; 38 - другий передавальний перетвойняті такі позначення: 49 - цифровий квадратурний рювач частоти; 39 - третій передавальний підсигенератор; 50 - перший (багатоканальний) сумалювач; 40 - вихідний передавальний підсилювач; тор; 51 - перший цифровий перетворювач частоти; 41 - антенний перемикач; 42 - вхідний приймаль52 - другий цифровий перетворювач частоти; 53 ний пристрій; 43 - перший приймальний перетвоперший фільтр децимації; 54 - другий фільтр дерювач частоти; 44 - перший приймальний підсицимації; 55 - перший оптимальний фільтр; 56 лювач; 45 - другий приймальний перетворювач другий оптимальний фільтр; 57 - перша схема чечастоти; 46- другий приймальний підсилювач; 47 резперіодної компенсації; 58 - друга схема черезаналого-цифровий перетворювач; 145 - генератор періодної компенсації; 59 - перший обчислювач коливань опорної частоти; 146 - перший подільник швидкого перетворення Фур'є; 60 - другий обчисчастоти; 147 - перший помножувач частоти; 148 лювач швидкого перетворення Фур'є; 61 - перша другий помножувач частоти; 149 - перший синтесхема вагової обробки; 62 - друга схема вагової затор частоти; 150 - перший керований генератор; обробки; 63 - перша схема піднесення до квадра151 - другий подільник частоти; 152 - перший розту; 64 - друга схема піднесення до квадрату; 133поділювач; 153 - схема призначення номера часдатчик параметрів зондувальних сигналів; 134 тоти; 154 - перший підсилювач; 155 - четверта сьомий датчик коефіцієнтів; 135- датчик кутової схема часової селекції; 156 - другий підсилювач; швидкості обертання антени; 136 - датчик ширини 157 - другий синтезатор частоти; 158 - другий кепроменя антени; 137 - датчик періоду повторюрований генератор; 159 - другий розподілювач; вання зондувань; 138 - обчислювач розмірності 160 - третій підсилювач; 161 - третій розподілювач; перетворення; 139 - обчислювач вагових коефіціє162 - п'ята схема часової селекції. нтів. Фігура 11. Блок-схема напівпровідникового виФігура 8. Блок-схема фрагмента пристрою хідного передавального підсилювача. На фігурі 11 цифрової обробки сигналів. На фігурі 8 прийняті прийняті такі позначення: 163 - напівпровідниковий такі позначення: 57 - перша схема черезперіодної модуль попереднього підсилення; 164 - четвертий компенсації; 58 - друга схема черезперіодної комрозподільник; 165-168 - передавальні напівпровідпенсації; 59 - перший обчислювач швидкого переникові підсилювальні модулі; 169 - НВЧ суматор. творення Фур'є; 60 - другий обчислювач швидкого 23 19788 24 Фігура 12. Блок-схема (фігура 12а) та часовий строю 4-1 (фігура 2)- когерентний гетеродин 29; розклад (фігура 126) управління багаторежимною перший 28 та другий 32 стабільні гетеродини; героботою РЛС. На фігурі 12 прийняті такі позначеннератор коливань частоти дискретизації 31; форня: 5 - виявник сигналів; 6 - пристрій відліку коормувач тактових імпульсів 30; синхронізатор 33; динат; 34 - формувач зондувальних сигналів; 55 формувач зондувальних сигналів 34; перший 36 та перший оптимальний фільтр; 56 - другий оптимадругий 38 передавальні перетворювачі частоти; льний фільтр; 170 - друга схема управління; 171 перший 35, другий 37 та третій 39 передавальні третя схема управління; U - послідовність зондупідсилювачі; вихідний передавальний підсилювач вальних сигналів; f1 - перша несуча частота; f2 40; антенний перемикач 41; вхідний приймальний друга несуча частота; t - поточний час у довільних пристрій 42; перший 43 та другий 45 приймальні одиницях; інтервали 0 - 1; 4-5 - випромінювання перетворювачі частоти; перший 44 та другий 46 зондувальних сигналів короткої тривалості; інтерприймальні підсилювачі; аналого-цифровий перевали 2-3; 6-7 - випромінювання зондувальних сигтворювач 47; до складу пристрою цифрової оброналів довгої тривалості; інтервали 0-2; 4-6 - короткі бки сигналів 4-2 (фігура 3) - цифровий квадратурінтервали між випромінюванням зондувальних ний генератор 49; перший 51 та другий 52 цифрові сигналів короткої та довгої тривалості; інтервал 2перетворювачі частоти; перший 53 та другий 54 4 - інтервал між випромінюванням зондувальних фільтри децимації; перший 55 та другий 56 оптисигналів довгої та короткої тривалості. мальні фільтри; перша 57 та друга 58 схеми череФігура 13. Розтин променя РЛС на рівні полозперіодної компенсації; перший 59 та другий 60 винної потужності у координатах "курсовий кут обчислювачі швидкого перетворення Фур'є; перша кут місця", якщо обвідна дзеркала антени та вісь 61 та друга 62 схеми вагової обробки; перша 63 та випромінювача паралельні. друга 64 схеми піднесення до квадрату та перший На фігурі 13а показано розтин променя при пі(багатоканальний) суматор 50; до складу виявника дйомі вісі променя над горизонтальною площиною сигналів 5 (фігура 4) - перша (багатоканальна) на кут 5°. порогова схема 70; (багатоканальний) обчислювач На фігурі 13б показано розтин променя при піпорогових рівнів від завад 67; перший (багатокадйомі вісі променя над горизонтальною площиною нальний) датчик коефіцієнтів 69; фільтр нульової на кут 45°. швидкості 65; фільтр міжоглядового накопичення Фігура 14. Схематичне зображення антени та 66 та радіолокаційна карта завад 68. ходу променів у дзеркальній антені з лінійним хвиПерелічені пристрої з'єднані між собою та з леводно-щілинним випромінювачем. комплексами і системами, які сполучаються з РЛС, На фігурі 14а показано варіант антени, у якої таким чином: антена 1 через обертальні переходи обвідна дзеркала антени та вісь випромінювача по куту місця 2 та курсовому куту 3 з'єднана з друпаралельні. гим плечем антенного перемикача 41; виходи приНа фігурі 146 показано варіант антени, у якої строю цифрової обробки сигналів 4-2 підключено обвідна дзеркала антени та вісь випромінювача до сигнального входу виявника сигналів 5 та до встановлені під кутом, який дорівнює куту відхипершого входу відеопроцесора 8; виходи виявника лення вісі променя від нормалі до вісі випромінюсигналів 5 підключено до сигнальних входів привача. строю відліку координат 6 та другого входу відеопНа фігурі 14 позначено: 172 - лінійний хвилероцесора 8; вихід пристрою відліку координат 6 водно-щілинний випромінювач; 173 - обвідна попідключено до входу пристрою вторинної обробки верхні дзеркала антени. 7; виходи відеопроцесора 8 та пристрою вторинної Блок-схема аналога корисної моделі радіолообробки 7 через перший 17 та другий 19 процесокаційної системи наведена на фігурі 1. ри обміну підключено до центрального процесора Розгорнуті блок-схеми аналогів окремих скла20; командні виходи центрального процесора 20 дових частин РЛС, як то приймальночерез другий 19 та перший 17 процесори обміну передавального пристрою, пристрою цифрової з'єднано з процесором управління 9 та контролеобробки сигналів та виявника сигналів наведено ром 10; командні виходи процесора управління 9 відповідно на фігурах 2-4. підключено до відповідних входів приймальноДо складу аналога корисної моделі належать передавального пристрою 4-1, пристрою цифрової такі пристрої: до складу РЛС в цілому (фігура 1) обробки сигналів 4-2; виявника сигналів 5, приантена 1; обертальний перехід по куту місця 2; строю відліку координат 6 та пристрою вторинної обертальний перехід по курсовому куту 3; приймаобробки 7; виходи контролера 10 підключені до льно-передавальний пристрій 4-1; пристрій цифвходів першого 11 та другого 12 пристроїв управрової обробки сигналів 4-2; виявник сигналів 5; ління приводами; виходи останніх підключено відпристрій відліку координат 6; пристрій вторинної повідно до приводу повороту антени 13 та приводу обробки 7; відео процесор 8; процесор управління обертання антени 14; датчик кута місця 15 та дат9; контролер 10; перший пристрій управління причик курсового кута 16 механічно зв'язані з відповіводом 11; другий пристрій управління приводом дними приводами антени; виходи датчика кута 12; привод повороту антени 13; привод обертання місця 15 та датчика курсового кута 16 підключено антени 14; датчик кута місця 15; датчик курсового до пристрою відліку координат 6; виходи когеренткута 16; перший процесор обміну 17; пульт управного гетеродина 29 підключено до формувача такління 18; до складу пульта управління 18 (фігура тових імпульсів 30 та формувача зондувального 1) - другий процесор обміну 19; центральний просигналу 34, який через послідовно з'єднані перший цесор 20; пристрій відображення 21; маніпулятор передавальний підсилювач 35, перший передава22; до складу приймально-передавального прильний перетворювач частоти 36, другий переда 25 19788 26 вальний підсилювач 37, другий передавальний них за порядковими номерами опорних входів перетворювач частоти 38, третій 39 та вихідний 40 першої (багатоканальної) порогової схеми 70. передавальні підсилювачі підключено до першого В РЛС передбачена можливість підключення плеча антенного перемикача 41; третє плече андатчика кута відхилення вісі платформи від натенного перемикача 41 з'єднано з вхідним прийпрямку на північ та датчика координат місця розмальним пристроєм 42, вихід якого через послідоташування платформи відповідно до входів 25 та вно з'єднані перший приймальний перетворювач 26 пульту управління 18 та підключення датчиків частоти 43, перший приймальний підсилювач 44, крену і тангажу платформи до входів 23 та 24 кондругий приймальний перетворювач частоти 45, тролера 10, а також підключення зовнішніх комдругий приймальний підсилювач 46, аналогоплексів і систем до виходів 27 пульта управлінцифровий перетворювач 47 підключено до сигнаня 18. льних входів пристрою цифрової обробки сигналів Функціонування аналога корисної моделі здій4-2; виходи першого стабільного гетеродина 28 снюється таким чином. підключено до гетеродинних входів другого переПошук в РЛС по азимуту ведеться шляхом медавального 38 та першого приймального 43 переханічного обертання антени навколо вертикальної творювачів частоти; виходи другого стабільного вісі, пошук по куту місця здійснюється за рахунок гетеродина 32 підключено до гетеродинних входів механічної зміни кута місця вісі променя антени. першого передавального 36 та другого приймальКоманди на режими обертання антени по курного 45 перетворювачів частоти; виходи формувасовому куту та поворот антени по куту місця надча тактових імпульсів 30 підключено до тактових ходять до контролера 10 від центрального процевходів пристрою цифрової обробки сигналів 4-2, сора 20 пульта управління 18 через другий 19 та виявника сигналів 5, пристрою відліку координат 6 перший 17 процесори обміну. Контролер 10 керує та синхронізатора 33; виходи синхронізатора 33 пристроями управління приводами антени 11 та підключено до входів синхронізації формувача 12, а останні управляють приводами антени по зондувальних сигналів 34, пристрою цифрової куту місця 13 та по курсовому куту 14. З приводаобробки сигналів 4-2, виявника сигналів 5, прими антени механічно зв'язані датчики кута місця 15 строю відліку координат 6 та вихідного передавата курсового кута 16, дані від яких надходять до льного підсилювача 40; виходи генератора колипристрою відліку координат 6 для прив'язки коорвань частоти дискретизації 31 підключено до динат виявлених цілей до відповідної системи котактових входів аналого-цифрового перетворюваординат. ча 47, цифрового квадратурного генератора 49, Коливання когерентного гетеродина 29 надхопершого 51 та другого 52 цифрових перетворювадять до входів формувача зондувальних сигналів чів частоти та першого 53 і другого 54 фільтрів 34 та формувача тактових імпульсів 30. Тактові децимації; виходи цифрового квадратурного генеімпульси формуються з коливань когерентного ратора 49 підключено до гетеродинних входів гетеродина 29 формувачем тактових імпульсів 30. першого 51 та другого 52 цифрових перетворюваСинхронізуючі імпульси формуються з тактових чів частоти; перший вихід аналого-цифрового пеімпульсів синхронізатором 33. Зондувальні сигнаретворювача 47 через послідовно з'єднані перший ли створюються формувачем зондувальних сигнацифровий перетворювач частоти 51, перший лів 34 на частоті когерентного гетеродина, яка фільтр децимації 53, перший оптимальний фільтр дорівнює другій проміжній частоті при прийомі сиг55, першу схему черезперіодної компенсації 57, налів. перший обчислювач швидкого перетворення Фур'є Створені зондувальні сигнали фільтруються та 59, першу схему вагової обробки 61 та першу схепідсилюються першим передавальним підсилюваму піднесення до квадрату 63 підключено до перчем 35, потім переносяться на першу проміжну шого входу першого (багатоканального) суматора частоту першим передавальним перетворювачем 50; другий вихід аналого-цифрового перетворювачастоти 36, фільтруються та підсилюються другим ча 47 через послідовно з'єднані другий цифровий передавальним підсилювачем 37, переносяться на перетворювач частоти 52, другий фільтр децимації несучу частоту РЛС другим передавальним перет54, другий оптимальний фільтр 46, другу схему ворювачем частоти 38, фільтруються та підсилючерезперіодної компенсації 58, другий обчислювач ються третім 39 та вихідним 40 передавальними швидкого перетворення Фур'є 60, другу схему вапідсилювачами, надходять до першого плеча ангової обробки 62 та другу схему піднесення до тенного перемикача 41 та через обертальні переквадрату 64 підключено до другого входу першого ходи по курсовому куту 3 та куту місця 2 - до анте(багатоканального) суматора 50; вихід нульового ни 1. Антена 1 забезпечує спрямоване частотного каналу першого (багатоканального) випромінювання електромагнітних коливань зонсуматора 50 підключено до фільтра нульової швидувальних сигналів в зовнішнє середовище та дкості 65, а вихід останнього підключено до входу спрямоване уловлювання сигналів, відбитих від фільтра міжоглядового накопичення 66; вихід фіоб'єктів, що становлять інтерес. Одночасно до льтру міжоглядового накопичення 66 підключено антени можуть надходити завади: електромагнітні до радіолокаційної карти завад 68 та перших вхоколивання, які можуть маскувати корисні сигнали дів (багатоканального) обчислювача порогових від об'єктів. рівнів від завад 67, до других входів якого підклюСигнали, що прийняті антеною 1, через оберчено відповідні за порядковими номерами виходи тальні переходи по куту місця 2 та курсовому куту першого (багатоканального) датчика коефіцієнтів 3 надходять до вхідного приймального пристрою 69; виходи (багатоканального) обчислювача поро42, підсилюються, фільтруються та переносяться гових рівнів від завад 67 підключено до відповідна першу проміжну частоту першим приймальним 27 19788 28 перетворювачем частоти 43, фільтруються та під68. Відліки рівня завад помножуються в (багатокасилюються першим приймальним підсилювачем нальному) обчислювачі порогових рівнів від завад 44, переносяться на другу проміжну частоту дру67 на коефіцієнти першого (багатоканального) гим приймальним перетворювачем частоти 45, датчика коефіцієнтів 69. Останній для кожного фільтруються та підсилюються третім приймальчастотного каналу має відповідний коефіцієнт, ним підсилювачем 46, а потім перетворюються в який забезпечує найкращу якість виявлення об'єкцифрову форму аналого-цифровим перетворюватів, сигнали від яких попадають до того частотного чем 41 з частотою, яка вища другої проміжної часканалу. Потім відліки з виходу (багатоканального) тоти та задається генератором коливань частоти обчислювача порогових рівнів від завад 67 викодискретизації 31. ристовуються в якості опорних рівнів для першої Цифрові відліки сигналів надходять до при(багатоканальної) порогової схеми 70. строю цифрової обробки сигналів 4-2, де зазнають При перевищенні сигналом певного частотнопереносу до відеосмуги частот у двох квадратурго каналу встановленого порогового рівня формуних каналах цифровими перетворювачами частоється бінарна одиниця, яка надходить до прити 51 та 52, на гетеродинні входи яких надходять строю відліку координат 6 для подальшої обробки. відповідні відліки коливань цифрового квадратурВиявлені сигнали з виходу першої (багатоканого генератора 49 з частотою відліків, яка дорівнальної) порогової схеми 70 надходять до сигнанює частоті дискретизації сигналів. Подальша обльних входів пристрою відліку координат 6. До робка сигналів провадиться при значно меншій координатних входів пристрою відліку координат 6 частоті відліків, а перехід на таку частоту здійснюнадходять поточні координати вісі променя антени ється фільтрами децимації 53 та 54. від датчиків кута місця 15 та курсового кута 16 та Потім сигнали зазнають обробки оптимальниімпульси синхронізації від синхронізатора 33, а до ми фільтрами 56 та 57, які забезпечують отримантактових його входів надходять тактові імпульси ня максимального відношення рівня сигналів до від формувача тактових імпульсів 30. шуму, фільтрами черезперіодної компенсації 57 та Пристрій відліку координат 6 забезпечує вияв58, які забезпечують придушення нерухомих завад лення позначок об'єктів, визначення та відлік їх та зменшення динамічного діапазону сигналів при координат. Дані координат позначок передаються подальшій обробці, та обчислювачами швидкого до пристрою вторинної обробки 7, який забезпечує перетворення Фур'є (ШПФ) 59 та 60, які забезпесупровід виявлених позначок, згладжування коорчують ефективне когерентне міжперіодне накопидинат, визначення параметрів руху та екстраполячування прийнятих сигналів майже за весь час цію координат об'єктів, що супроводжуються. контакту променя РЛС з об'єктом. Вихідні дані з пристрою цифрової обробки сигПісля такого перетворення формується ціла налів 4-2 та виявника сигналів 5 передаються до низка частотних каналів, кількість яких дорівнює відеопроцесора 8, а його вихідні дані та дані з вирозмірності перетворення Фур'є N, а порядкові ходу пристрою вторинної обробки 7 через перший номери яких починаються з нуля. Кожний частот17 та другий 19 процесор обміну надходять до ний канал забезпечує найкраще накопичення енецентрального процесора 20. Центральний процергії сигналів, відбитих від об'єктів, радіальна швидсор 20 здійснює оцінку радіолокаційної обстановки кість яких дорівнює та відпрацювання даних для висвітлення первинної та вторинної обстановки на екрані пристрою VR=m*FR* /(2N), відображення 21 та видачі даних комплексам та де m - порядковий номер частотного каналу; системам, що сполучаються з РЛС, через процеFR - частота повторювання зондування; сор обміну 19 та вихід 27. - довжина хвилі РЛС; Центральний процесор 20 формує команди N - розмірність ШПФ. для управління РЛС та її режимами роботи. ОпеСигнали з виходів обчислювачів ШПФ 61 та 62 ратор взаємодіє з центральним процесором 20 за зазнають додаткової обробки схемами вагової допомогою маніпулятора 22. Команди управління обробки 61 та 62, які забезпечують істотне придучерез другий 19 та перший 17 процесори обміну шення бічних пелюсток накопичених сигналів в надходять до контролера 10 та процесора управчастотному просторі, та піднесення до квадрату ління 9. Команди з виходу процесора управління 9 схемами 63 та 64, а потім додаються один до одрозподіляються відповідним чином між приймального в першому (багатоканальному) суматорі 50, но-передавальним пристроєм 4-1, пристроєм цина виходах частотних каналів якого формуються фрової обробки сигналів 4-2, виявником сигналів цифрові відліки сигналів, рівень яких пропорційний 5, пристроєм відліку координат 6 та пристроєм потужності сигналів, які прийняті від об'єктів звідвторинної обробки 7. повідною радіальною швидкістю. В РЛС передбачена можливість підключення Ці відліки надходять до сигнальних входів датчика кута відхилення вісі платформи від напершої (багатоканальної) порогової схеми 70, до прямку на північ та датчика координат місця розопорних входів якої надходять порогові рівні, обташування платформи відповідно до входів 25 та числені для кожного частотного каналу таким чи26 пульту управління 18 для прив'язки координат ном. об'єктів до радіолокаційних або географічних коСигнали з виходу нульового частотного каналу ординат. Передбачена можливість підключення пристрою цифрової обробки сигналів 4-2 через датчиків крену та тангажу платформи до входів 23 фільтр нульової швидкості 65 надходять до фільтта 24 контролера 10. Такі дані можуть бути викора міжоглядового накопичення 66, де накопичуристані для зміни нахилу антени або підвищення ються в кожному елементі розрізнення карти завад та запам'ятовуються в радіолокаційній карті завад 29 19788 30 точності вимірювання координат виявлених об'єк44 та другий 46 приймальні підсилювачі; аналоготів. цифровий перетворювач 47; до складу пристрою Аналогу (прототипу) корисної моделі та перецифрової обробки сигналів 4-2 (фігура 3) - цифроліченим вище системам притаманні деякі суттєві вий квадратурний генератор 49; перший 51 та друнедоліки, а також особливості, які істотно обмежугий 52 цифрові перетворювачі частоти; перший 53 ють їх ефективність або можливість їх використанта другий 54 фільтри децимації; перший 55 та друня при розміщенні на мобільних транспортних загий 56 оптимальні фільтри; перша 57 та друга 58 собах: велика зона дії за відстанню вимагає схеми черезперіодної компенсації; перший 59 та використання тривалих інтервалів між суміжними другий 60 обчислювачі швидкого перетворення зондуваннями, обмежує кількість сигналів від об'єФур'є; перша 61 та друга 62 схеми вагової обробкта й суттєво обмежує можливості ефективного ки; перша 63 та друга 64 схеми піднесення до кваодночасного придушення завад різного походжендрату та перший (багатоканальний) суматор 50; до ня; відсутність ефективного захисту від імпульсних складу виявника сигналів 5 (фігура 4) - перша (базавад приводить до уразливості системи зондувагатоканальна) порогова схема 70; (багатоканальльними сигналами сусідніх РЛС, суттєво збільшує ний) обчислювач порогових рівнів від завад 67; кількість хибних виявлень та може придушувати перший (багатоканальний) датчик коефіцієнтів 69; значну частину зони дії системи; практична немофільтр нульової швидкості 65; фільтр міжоглядожливість ефективного одночасного придушення вого накопичення 66 та радіолокаційна карта заспектрально багатогорбих завад (наприклад, завад 68; а також пристрої, додатково введені до вад від земної поверхні та дощових крапель) через складу виявника сигналів 5 (фігура 5): комбінаторобмежену кількість сигналів та неповну їх когеренний пристрій 71; перший 73 та другий 104 датчики тність; велика потужність зондувальних сигналів параметрів завад; перший 72 та другий 105 обчисможе спричинити ураження персоналу електромалювачі номерів частотних каналів; другий (багатогнітними або рентгенівськими випромінюваннями канальний) датчик коефіцієнтів 84; набір схем відта привести до інтенсивних взаємних завад; викобору максимуму (74-78); обчислювачі поточного ристання електровакуумних НВЧ та модуляторних рівня завад (79-83); обчислювачі порогових рівнів приладів у вихідних передавальних підсилювачах від шуму (85-89); обчислювачі підсумкових порогосуттєво погіршує експлуатаційну надійність та безвих рівнів (90-94); обчислювач поправок 95; датчик печну експлуатацію системи. поправок 96; перша (багатоканальна) схема заБлок-схема РЛС відповідно до п.1 формули тримки 97; другий суматор 98; датчик порогового корисної моделі рівня 101; друга порогова схема 99; перша схема Узагальнююча блок-схема радіолокаційної сичасового придушення 100; схема придушення часстеми наведена на фігурі 1, розгорнуті блок-схеми тотних каналів 106; датчик меж по відстані 107; окремих складових частин РЛС, як то приймальнодатчик меж по курсовому куту 108; обчислювач передавального пристрою та пристрою цифрової просторових стробів 103; схема просторової селеобробки сигналів наведені відповідно на фігурах 2, кції 102. 3, а блок-схема вдосконаленого виявника сигналів Перелічені пристрої з'єднані між собою та з наведена на фігурі 5. комплексами і системами, що сполучаються з До складу корисної моделі радіолокаційної сиРЛС, таким чином: антена 1 через обертальні пестеми належать пристрої, які аналогічні пристроям реходи по куту місця 2 та курсовому куту 3 з'єднааналога корисної моделі: до складу РЛС в цілому на з другим плечем антенного перемикача 41; ви(фігура 1) - антена 1; обертальні переходи по куту ходи пристрою цифрової обробки сигналів 4-2 місця 2 та курсовому куту 3; приймальнопідключено до сигнального входу виявника сигнапередавальний пристрій 4-1; пристрій цифрової лів 5 та до першого входу відеопроцесора 8; вихообробки сигналів 4-2; виявник сигналів 5; пристрій ди виявника сигналів 5 підключено до сигнальних відліку координат 6; пристрій вторинної обробки 7; входів пристрою відліку координат 6 та другого відео процесор 8; процесор управління 9; контровходу відеопроцесора 8; вихід пристрою відліку лер 10; перший 11 та другий 12 пристрої управлінкоординат 6 підключено до входу пристрою втоня приводами; привод повороту антени 13; привод ринної обробки 7; виходи відеопроцесора 8 та обертання антени 14; датчики кута місця 15 та пристрою вторинної обробки 7 через перший 17 та курсового кута 16; перший процесор обміну 17; другий 19 процесори обміну підключено до пульт управління 18; до складу пульта управління центрального процесора 20; командні виходи 18 (фігура 1)- центральний процесор 20; пристрій центрального процесора 20 через другий 19 та відображення 21; маніпулятор 22 та другий процеперший 17 процесори обміну з'єднано з процесосор обміну 19; до складу приймальнором управління 9 та контролером 10; командні передавального пристрою 4-1 (фігура 2) - когеренвиходи процесора управління 9 підключено до тний гетеродин 29; перший 28 та другий 32 стабівідповідних входів приймально-передавального льні гетеродини; генератор коливань частоти диспристрою 4-1, пристрою цифрової обробки сигнакретизації 31; формувач тактових імпульсів 30; лів 4-2; виявника сигналів 5, пристрою відліку косинхронізатор 33; формувач зондувальних сигнаординат 6 та пристрою вторинної обробки 7; вихолів 34; перший 36 та другий 38 передавальні переди контролера 10 підключені до входів першого 11 творювачі частоти; перший 35, другий 37 та третій та другого 12 пристроїв управління приводами; 39 передавальні підсилювачі; вихідний передававиходи останніх підключено відповідно до приводу льний підсилювач 40; антенний перемикач 41; вхіповороту антени 13 та приводу обертання антени дний приймальний пристрій 42; перший 43 та дру14; датчик кута місця 15 та датчик курсового кута гий 45 приймальні перетворювачі частоти; перший 16 механічно зв'язані з відповідними 13 та 14 при 31 19788 32 водами антени; виходи датчика кута місця 15 та дового накопичення 66; вихід фільтра міжоглядодатчика курсового кута 16 підключено до коордивого накопичення 66 підключено до радіолокаційнатних входів пристрою відліку координат 6; вихоної карти завад 68 та перших входів (багатоканади когерентного гетеродина 29 підключено до фольного) обчислювача порогових рівнів від завад рмувача тактових імпульсів 30 та формувача 67, до других входів якого підключено відповідні за зондувального сигналу 34, який через послідовно порядковими номерами виходи першого (багатоз'єднані перший передавальний підсилювач 35, канального) датчика коефіцієнтів 69; виходи (багаперший передавальний перетворювач частоти 36, токанального) обчислювача порогових рівнів від другий передавальний підсилювач 37, другий пезавад 67 підключено до відповідних за порядковиредавальний перетворювач частоти 38, третій 39 ми номерами опорних входів першої (багатоканата вихідний 40 передавальні підсилювачі підклюльної) порогової схеми 70, перші виходи частотних чено до першого плеча антенного перемикача 41; каналів першого (багатоканального) суматора 50 з третє плече антенного перемикача 41 з'єднано з порядковими номерами від 0 до (N-1) через першу вхідним приймальним пристроєм 42, вихід якого (багатоканальну) схему затримки 97 з'єднано з через послідовно з'єднані перший приймальний сигнальними входами першої багатоканальної перетворювач частоти 43, перший приймальний порогової схеми 70, (тут N - розмірність швидкого підсилювач 44, другий приймальний перетворювач перетворення Фур'є); другі виходи частотних каначастоти 45, другий приймальний підсилювач 46 та лів першого (багатоканального) суматора 50 з поаналого-цифровий перетворювач 47 підключено рядковими номерами від 0 до (N-1) з'єднано зі до сигнальних входів пристрою цифрової обробки входами комбінаторного пристрою 71, (тут N - росигналів 4-2; виходи першого стабільного гетерозмірність швидкого перетворення Фур'є), перший дина 28 підключено до гетеродинних входів друговихід комбінаторного пристрою 71 з першою фраго передавального 38 та першого приймального 43 кцією частотних каналів з порядковими номерами перетворювачів частоти; виходи другого стабільвід 0 до S та від (N-S) до (N-1) підключено до перного гетеродина 32 підключено до гетеродинних шої схеми відбору максимуму 74, входів першого передавального 36 та другого (тут N - розмірність швидкого перетворення приймального 45 перетворювачів частоти; виходи Фур'є; формувача тактових імпульсів 30 підключено до S - половина кількості частотних каналів матактових входів пристрою цифрової обробки сиглорухомих завад за винятком каналу нульової налів 4-2, виявника сигналів 5, пристрою відліку швидкості); координат 6 та синхронізатора 33; виходи синхродругий вихід комбінаторного пристрою 71 з нізатора 33 підключено до входів синхронізації другою фракцією частотних каналів з порядковими формувача зондувальних сигналів 34, пристрою номерами від (5+1) до (М-1) підключено до другої цифрової обробки сигналів 4-2, виявника сигналів схеми відбору максимуму 75, 5, пристрою відліку координат 6 та вихідного пе(тут М-номінальна кількість частотних каналів редавального підсилювача 40; виходи генератора у стандартній фракції; коливань частоти дискретизації 31 підключено до S - половина кількості частотних каналів матактових входів аналого-цифрового перетворювалорухомих завад за винятком каналу нульової ча 47, цифрового квадратурного генератора 49, швидкості); третій вихід комбінаторного пристрою першого 51 та другого 52 цифрових перетворюва71 з третьою фракцією частотних каналів з порядчів частоти та першого 53 і другого 54 фільтрів ковими номерами від (N-М) до (N-S-1) підключено децимації; виходи цифрового квадратурного генедо третьої схеми відбору максимуму 76, ратора 49 підключено до гетеродинних входів (тут а N - розмірність швидкого перетворення першого 51 та другого 52 цифрових перетворюваФур'є; чів частоти; перший вихід аналого-цифрового пеМ - номінальна кількість частотних каналів у ретворювача 47 через послідовно з'єднані перший стандартній фракції; цифровий перетворювач частоти 51, перший S - половина кількості частотних каналів мафільтр децимації 53, перший оптимальний фільтр лорухомих завад за винятком каналу нульової 55, першу схему черезперіодної компенсації 57, швидкості); перший обчислювач швидкого перетворення Фур'є m-ий вихід комбінаторного пристрою 71 з m59, першу схему вагової обробки 61 та першу схеою фракцією частотних каналів з порядковими му піднесення до квадрату 63 підключено до відномерами від [(m-3)*М] до [(m-2)*M-1] підключено повідних перших входів першого (багатоканальнодо m-ої схеми відбору максимуму, причому m зміго) суматора 50; другий вихід аналого-цифрового нюється від 4 до (N/М+1), (тут N- розмірність швиперетворювача 47 через послідовно з'єднані друдкого перетворення Фур'є; гий цифровий перетворювач частоти 52, другий М - номінальна кількість частотних каналів у фільтр децимації 54, другий оптимальний фільтр стандартній фракції); зокрема, четвертий вихід 46, другу схему черезперіодної компенсації 58, комбінаторного пристрою 71 з четвертою фракцідругий обчислювач швидкого перетворення Фур'є єю частотних каналів з порядковими номерами від 60, другу схему вагової обробки 62 та другу схему М до (2*М-1) підключено до четвертої схеми відпіднесення до квадрату 64 підключено до відповібору максимуму 77, а (N/М+1)-ий вихід комбінатодних других входів першого (багатоканального) рного пристрою 71 з (N/М+1)-ою фракцією частотсуматора 50; вихід нульового частотного каналу них каналів з порядковими номерами від (N-2*M) першого (багатоканального) суматора 50 підклюдо (N-M-1) підключено до (N/М+1)-ої схеми відбору чено до фільтра нульової швидкості 65, а вихід максимуму 78, (тут N - розмірність швидкого переостаннього підключено до входу фільтра міжоглятворення Фур'є; 33 19788 34 М - номінальна кількість частотних каналів у дкого перетворення Фур'є; суттєво збільшена кільстандартній фракції); виходи схем відбору максикість частотних каналів після перетворення Фур'є; мумів (74-78) з'єднані зі входами відповідних за - як наслідок, суттєві кількісні зміни призвели до порядковими номерами обчислювачів поточного необхідності вдосконалення пристроїв обробки рівня завад (79-83); входи обчислювачів порогових сигналів. рівнів від шуму (85-89) підключено до відповідних Пошук по курсовому куту ведеться шляхом за порядковими номерами виходів другого (багамеханічного обертання антени навколо вертикатоканального) датчика коефіцієнтів 84 та до вихольної вісі, пошук по куту місця здійснюється за дів відповідних за порядковими номерами обчисрахунок механічної зміни кута місця вісі променя лювачів поточного рівня завад (79-83); входи антени. обчислювача поправок 95 з'єднано з виходами Команди на режими обертання антени по курдатчика поправок 96; перші входи (багатоканальсовому куту та поворот антени по куту місця надного) обчислювача порогових рівнів від завад 67 ходять до контролера 10 від центрального процепідключено до виходу фільтра міжоглядового насора 20 пульта управління 18 через другий 19 та копичення 66, а другі його входи підключені до перший 17 процесори обміну. Контролер 10 керує відповідних за порядковими номерами виходів пристроями управління приводами антени 11 та першого (багатоканального) датчика коефіцієнтів 12, а останні управляють приводами антени по 69; виходи обчислювача поправок 95, (багатокакуту місця 13 та по курсовому куту 14. З приводанального) обчислювача порогових рівнів від завад ми антени механічно зв'язані датчики кута місця 15 67 та обчислювачів порогових рівнів від шуму (85 та курсового кута 16, дані від яких надходять до 89) підключені до входів відповідних за порядкопристрою відліку координат 6 для прив'язки коорвими номерами обчислювачів підсумкових порогодинат виявлених цілей до відповідної системи кових рівнів (90-94); виходи обчислювачів підсумкоординат. вих порогових рівнів (90-94) підключено до Коливання когерентного гетеродина 29 надховідповідних за порядковими номерами опорних дять до входів формувача зондувальних сигналів входів першої (багатоканальної) порогової схеми 34 та формувача тактових імпульсів 30. Тактові 70; перші виходи першої (багатоканальної) пороімпульси формуються з коливань когерентного гової схеми 70 підключено до входів другого сумагетеродина 29 формувачем тактових імпульсів 30. тора 98; входи другої порогової схеми 99 підклюСинхронізуючі імпульси формуються з тактових чено до виходу другого суматора 98 та до першого імпульсів синхронізатором 33. датчика порогового рівня 101; вихід другої порогоЗондувальні сигнали створюються формувавої схеми 99 підключено до керуючого входу перчем зондувальних сигналів 34 на частоті когерентшої схеми часового придушення 100; датчики меж ного гетеродина, яка дорівнює другій проміжній по відстані 107 та по курсовому куту 109 та коорчастоті при прийомі сигналів. Створені сигнали динатні виходи пристрою відліку координат 6 підкфільтруються та підсилюються першим передавалючені до входів обчислювача просторових строльним підсилювачем 35, потім переносяться на бів 103, вихід схеми формування просторових першу проміжну частоту першим передавальним стробів 103 підключено до керуючого входу схеми перетворювачем частоти 36, фільтруються та підпросторової селекції 102; входи другого обчислюсилюються другим передавальним підсилювачем вача номерів частотних каналів 105 з'єднано з 37, переносяться на несучу частоту РЛС другим другим датчиком параметрів завад 104, а його передавальним перетворювачем частоти 38, фівихід підключено до керуючого входу схеми прильтруються та підсилюються третім 39 та вихідним душення частотних каналів 106; другі виходи пер40 передавальними підсилювачами, надходять до шої (багатоканальної) порогової схеми 70 через першого плеча антенного перемикача 41 та через послідовно включені схему часового придушення обертальні переходи по курсовому куту 3 та куту 100, схему частотного придушення 106 та схему місця 2 - до антени 1. просторової селекції 102 підключено до входів Антена 1 забезпечує спрямоване випромінюпристрою відліку координат 6. вання електромагнітних коливань зондувальних В РЛС передбачена можливість підключення сигналів в зовнішнє середовище та спрямоване датчика кута відхилення вісі платформи від науловлювання сигналів, відбитих від об'єктів, що прямку на північ та датчика координат місця розстановлять інтерес. Одночасно до антени можуть ташування платформи відповідно до входів 25 та надходити завади: електромагнітні коливання, які 26 пульта управління 18 та підключення датчиків можуть маскувати корисні сигнали від об'єктів. крену та тангажу платформи до входів 23 та 24 Сигнали, що прийняті антеною 1, через оберконтролера 10, а також підключення зовнішніх тальні переходи по куту місця 2 та курсовому куту комплексів і систем до виходів 27 пульта управ3 надходять до вхідного приймального пристрою ління 18. 42, підсилюються, фільтруються та переносяться Функціонування РЛС згідно з п.1 формули кона першу проміжну частоту першим приймальним рисної моделі перетворювачем частоти 43, фільтруються та підФункціонування РЛС згідно з п.1 формули косилюються першим приймальним підсилювачем рисної моделі в значній частині збігається з функ44, переносяться на другу проміжну частоту друціонуванням аналога корисної моделі. гим приймальним перетворювачем частоти 45, Відмінною особливістю функціонування корисфільтруються та підсилюються третім приймальної моделі від її аналога є таке: суттєво збільшена ним підсилювачем 46, а потім перетворюються в кількість сигналів, що підлягають когерентному цифрову форму аналого-цифровим перетворюванакопиченню; суттєво збільшена розмірність швичем 41 з частотою, яка вища другої проміжної час 35 19788 36 тоти та задається генератором коливань частоти згруповано декілька частотних каналів за спеціадискретизації 31. льним алгоритмом. Цифрові відліки сигналів надходять до приДо першої фракції включаються нульовий кастрою цифрової обробки сигналів 4-2, де зазнають нал і декілька сусідніх частотних каналів, які розпереносу до смуги відеочастот у двох квадратурташовані симетрично навколо нульового каналу й них каналах цифровими перетворювачами частомають порядкові номери від 1 до 5'та від (N-S) до ти 51 та 52, на гетеродинні входи яких надходять (N-1), (тут N - розмірність швидкого перетворення відповідні відліки коливань цифрового квадратурФур'є; ного генератора 49 з частотою відліків, яка дорівS - половина кількості частотних каналів манює частоті дискретизації сигналів. Подальша облорухомих завад за винятком каналу нульової робка сигналів провадиться при значно меншій швидкості). частоті відліків, а перехід на таку частоту здійснюКількість сусідніх бічних каналів визначається ється фільтрами децимації 53 та 54. першим обчислювачем номерів частотних каналів Потім сигнали зазнають обробки оптимальни72 у відповідності з даними датчика параметрів ми фільтрами 56 та 57, які забезпечують отриман(малорухомих) завад 73. ня максимального відношення рівня сигналів до Наприклад, при когерентній обробці 64 сигнашуму, а також фільтрами черезперіодної компенлів (N=64) і обчисленій кількості половини бічних сації 57 та 58, які забезпечують придушення неруканалів S=2 до першої фракції попадають канали з хомих завад та зменшення динамічного діапазону порядковими номерами 0; 1; 2; 62; 63. сигналів при подальшій обробці, та обчислювачаДо другої фракції включаються частотні канами швидкого перетворення Фур'є (ШПФ) 59 та 60, ли з порядковими номерами від (S+1) до (М-1), які забезпечують ефективне когерентне міжперіо(тут М - відповідно номінальна кількість частотних дне накопичування прийнятих сигналів майже за каналів у стандартній фракції; весь час контакту променя РЛС з об'єктом. S - половина кількості частотних каналів маПісля такого перетворення формується ціла лорухомих завад за винятком каналу нульової низка частотних каналів, кількість яких дорівнює швидкості). розмірності перетворення Фур'є N, а порядкові Наприклад, при когерентній обробці 64 сигнаномери яких починаються з нуля. Кожний частотлів (N=64), номінальній кількості частотних каналів ний канал забезпечує найкраще накопичення енеу стандартній фракції М=8 і обчисленій кількості ргії сигналів, відбитих від об'єктів, радіальна швидполовини бічних каналів S=2 до другої фракції кість яких дорівнює попадають канали з порядковими номерами 3; 4; 5; 6; 7. VR=m*FR* /(2N), До третьої фракції включаються частотні каде m - порядковий номер частотного каналу; нали з порядковими номерами від (N-M) до FR - частота повторювання зондування; (N-S-1), - довжина хвилі РЛС; (тут N - розмірність швидкого перетворення N - розмірність ШПФ. Фур'є; Сигнали з виходів обчислювачів ШПФ 61 та 62 М - відповідно номінальна кількість частотних зазнають додаткової обробки схемами вагової каналів у стандартній фракції; обробки 61 та 62, які забезпечують істотне придуS - половина кількості частотних каналів машення бічних пелюсток накопичених сигналів в лорухомих завад за винятком каналу нульової частотному просторі, та піднесення до квадрату швидкості). схемами 63 та 64, а потім додаються один до одНаприклад, при когерентній обробці 64 сигнаного в суматорі 50, на виході якого формуються лів (N=64), номінальній кількості частотних каналів цифрові відліки сигналів, рівень яких пропорційний у стандартній фракції М=8 і обчисленій кількості потужності прийнятих сигналів. половини бічних каналів S=2 до третьої фракції Сигнали нульового частотного каналу обчиспопадають канали з порядковими номерами 56; лювача ШПФ, як і у аналога корисної моделі, над57; 58; 59; 60;61. ходять через фільтр нульової швидкості 65 до фіДо m-ої фракції включаються частотні канали з льтру міжоглядового накопичення 66, де порядковими номерами від [(m-3)*М] до [(m-2)*Мнакопичуються в кожному елементі розрізнення 1], причому m змінюється від 4 до (N/M+1); карти завад та запам'ятовуються в радіолокаційній (тут N - розмірність швидкого перетворення карті завад 68. Відліки рівня завад радіолокаційної Фур'є; карти завад 68 помножуються в (багатоканальноМ - номінальна кількість частотних каналів у му) обчислювачі порогових рівнів від завад 67 на стандартній фракції). коефіцієнти першого (багатоканального) датчика Наприклад, при когерентній обробці 64 сигнакоефіцієнтів 69, в якому для кожного частотного лів (N=64) і номінальній кількості частотних каналів каналу є відповідний коефіцієнт. Потім відліки з у стандартній фракції М=8 до четвертої фракції виходів (багатоканального) обчислювача порогопопадають канали з порядковими номерами 8; 9; вих рівнів від завад 67 використовуються в якості 10; 11; 12; 13; 14; 15; а до дев'ятої фракції - канали других складових при обчисленні підсумкових поз порядковими номерами 48; 49; 50; 51; 52; 53; 54; рогових рівнів. 55. Для спрощення апаратурної реалізації при Сигнали з першого виходу комбінаторного збереженні якості обробки сигнали частотних капристрою 71 з першою фракцією частотних кананалів надходять до комбінаторного пристрою, де лів подаються на вхід першої схеми відбору макрозділяються на декілька фракцій, в кожній з яких симуму 74, де в кожний поточний момент відбира 37 19788 38 ються сигнали з найбільшим рівнем та передаютьпершої (багатоканальної) схеми часового придуся до обчислювача поточного рівня завад 79. шення 100. Поточний рівень завад обчислюється за будьОбробка сигналів в інших фракціях частотних яким відомим алгоритмом, наприклад, алгоритмом каналів виконується аналогічно. поточного середнього, який полягає у такому. Всі виявлені сигнали (бінарні одиниці) підсуВихідні сигнали надходять до схеми затримки мовуються другим суматором 98, а обчислена суз відгалуженнями. Затримка від відгалуження до ма порівнюється в пороговій схемі 99 з наперед сусіднього відгалуження дорівнює елементу розрівизначеним пороговим рівнем, який задається знення за відстанню. датчиком порогового рівня 101. При дії на РЛС Відгалуження розподілені таким чином. Перша імпульсної завади, наприклад від сусідньої РЛС, в сукупність відгалужень (яка складає, наприклад, 8 багатьох частотних каналах з'являються перехідні відгалужень), які розташовані послідовно один за процеси, які призводять до багатьох хибних одноодним та являють собою випереджуючі відліки часних виявлень сигналів в різних частотних касигналів, підключаються до входів першого суманалах. тора (першого напівсуматора), на виході якого Якщо таких виявлень сигналів багато, це свідформується перша напівсума відліків. Друга сукучить саме про дію імпульсної завади. При перевипність відгалужень (яка складає, наприклад, теж 8 щені порогового рівня на виході другої порогової відгалужень), які розташовані послідовно один за схеми 99 формується логічна одиниця, яка викоодним та являють собою запізнюючі відліки сигнаристовується в якості команди придушення сигналів, підключаються до входів другого суматора лів, які надійшли до входів першої схеми часового (другого напівсуматора), на виході якого формупридушення 100, на час дії такої імпульсної зається друга напівсума відліків. Між першою та друвади. гою сукупністю відліків сигналів розташовується Якщо кількість сигналів, одночасно виявлених декілька відгалужень, які формують "прогалину" в частотних каналах, не досягає встановленого навколо можливого розташування корисного сигпорогового рівня, це свідчить про велику ймовірналу. Обидві напівсуми складаються й формують ність відсутності імпульсної завади, в такому разі таким чином рівень, пропорційний поточному ріввиявлені сигнали проходять через першу схему ню завад в каналі з урахуванням кількості відгалучасового придушення 100 безперешкодно. жень. Повна когерентна обробка сигналів в усій зоні Цей рівень помножується в обчислювачі поровідповідальності РЛС не завжди є обов'язковою, а гового рівня від шуму 85 на коефіцієнт, який задав деяких випадках може бути шкідливою. Тому в ється на першому виході другого (багатоканальнообчислювачі просторових стробів 103 формуються го) датчика коефіцієнтів 84, й надходить до межі робочих зон за даними датчиків меж зони за першого входу обчислювача підсумкового пороговідстанню 107 та за за курсовим кутом 108. Поточвого рівня 90 в якості першої складової порогового ні дані відстані та курсового кута від пристрою відрівня. До другого входу першого обчислювача підліку координат 6 порівнюються зі сформованими сумкового порогового рівня 90 надходить друга межами робочих зон. В разі попадання поточних складова порогового рівня, обчислена з урахуванкоординат в задані межі робочих зон на виході ням рівня завад радіолокаційної карти завад 68. обчислювача просторових стробів 103 формується До третього входу обчислювача 90 надходять трелогічна одиниця, яка дозволяє безперешкодний тя складова поправки порогового рівня від обчиспрохід даних через схему просторової селекції лювача поправок 95 з урахуванням відповідної 102. зміни порогового рівня зі зміною відстані та можДля придушення рухомих пасивних завад, наливих корегувань порогового рівня оператором, які приклад дощових крапель, використовується схезадаються за допомогою датчика поправок 96. ма придушення частотних каналів 106. Другий даУсі перелічені складові підсумовуються пертчик параметрів завад 104 задає параметри шим обчислювачем підсумкового порогового рівня рухомої завади (наприклад, радіальну швидкість 90 й надходять в якості підсумкового порогового завади та її дисперсію). Другий обчислювач номерівня до відповідних за порядковими номерами рів частотних каналів 105 вираховує номери часопорних входів першої фракції частотних каналів тотних каналів, які зазнали найбільшого ураження першої (багатоканальної) порогової схеми 70. завадами, й передає їх до схеми придушення часДо відповідних за порядковими номерами сигтотних каналів 106. Остання відключає відповідні нальних входів першої фракції частотних каналів за порядковими номерами виходи частотних кана(багатоканальної) порогової схеми 70 через першу лів й забезпечує таким чином сталу ймовірність (багатоканальну) схему затримки 97 надходять хибних виявлень в умовах дії рухомої завади. сигнали частотних каналів з порядковими номераВиявлені сигнали з виходів виявника сигналів ми, які відповідають порядковим номерам частот5 надходять до входів пристрою відліку координат них каналів першої фракції. Вхідні сигнали порівб, до інших його входів надходять поточні координюються з відповідними пороговими рівнями. нати вісі променя антени від датчиків кута місця 15 У разі перевищення порогового рівня сигналата курсового кута 16, імпульси синхронізації від ми на виходах першої (багатоканальної) порогової синхронізатора 33 та тактові імпульси від формусхеми 70 з відповідними порядковими номерами вача тактових імпульсів 30. Пристрій відліку коорформуються бінарні одиниці, які надходять до динат 6 забезпечує виявлення позначок об'єктів, входів (багатовходового) другого суматора 98 та визначення та відлік їх координат. Дані координат до відповідних за порядковими номерами входів позначок передаються до пристрою вторинної обробки 7, який забезпечує супровід виявлених поз 39 19788 40 начок, згладжування координат, визначення параПерелічені пристрої з'єднані таким чином: виметрів руху та екстраполяцію координат об'єктів, хід схеми відбору максимуму (наприклад, схеми що супроводжуються. 74) підключено до першого входу третього сумаВихідні дані з пристрою цифрової обробки сигтора 113, до сигнального входу третьої порогової налів 4-2 та виявника сигналів 5 передаються до схеми 117 та до першого сигнального входу комувідеопроцесора 8, де приводяться до стандарту, татора 118; перший вхід першого помножувача сумісного з параметрами пристрою відображення 112 з'єднано з третім датчиком коефіцієнтів 111, а 21, а вихідні дані відеопроцесора 8 та дані з виходругий його вхід через другу схему затримки 114 ду пристрою вторинної обробки 7 через перший 17 підключено до першого виходу третього суматора та другий 19 процесор обміну надходять до 113; другий вхід третього суматора 113 підключецентрального процесора 20. Центральний процено до виходу першого помножувача 112; входи сор 20 здійснює оцінку радіолокаційної обстановки другого помножувача 115 з'єднані з шостим датчита відпрацювання даних для висвітлення первинком коефіцієнтів 116 та з другим виходом третього ної та вторинної обстановки на екрані пристрою суматора 113; вихід другого помножувача 115 підвідображення 21 та видачі даних комплексам та ключено до керуючого входу третьої порогової системам, що сполучаються з РЛС, через процесхеми 117; керуючий вхід комутатора 118 з'єднано сор обміну 19 та вихід 27. з виходом третьої порогової схеми 117; а вихід Центральний процесор 20 формує команди комутатора 118 підключено до входу третьої схедля управління РЛС та її режимами роботи. Опеми затримки 122; третя схема затримки 122 має ратор взаємодіє з центральним процесором 20за відгалуження через кожний елемент розрізнення допомогою маніпулятора 22. Команди управління по відстані; найбільший час затримки третьої схечерез другий 19 та перший 17 процесори обміну ми затримки 122 складає (2*R+V-1) елементів рознадходять до контролера 10 та процесора управрізнення по відстані, (тут R - кількість відгалужень ління 9. Команди з виходу процесора управління 9 для кожної навчаючої вибірки; розподіляються відповідним чином між приймальV- кількість відгалужень у прогалині між нано-передавальним пристроєм 4-1, пристроєм цивчаючими вибірками); фрової обробки сигналів 4-2; виявником сигналів відгалуження третьої схеми затримки 122 з поряд5, пристроєм відліку координат 6 та пристроєм ковими номерами від 0 до (R-1) приєднані до вховторинної обробки 7. дів четвертого суматора 123; відгалуження третьої В РЛС передбачена можливість підключення схеми затримки 122 з порядковими номерами від датчика кута відхилення вісі платформи від на(R+V) до (2*R+V-1) - до входів п'ятого суматора прямку на північ та датчика координат місця роз124, (тут R - кількість відгалужень для кожної наташування платформи відповідно до входів 25 та вчаючої вибірки; 26 пульту управління 18 для прив'язки координат V - кількість відгалужень у прогалині між наоб'єктів до радіолокаційних або географічних ковчаючими вибірками); ординат. виходи четвертого суматора 123 приєднані до сигПередбачена також можливість підключення нального входу другої схеми придушення 127, датчиків крену та тангажу платформи до входів 23 першого входу третього помножувача 125 та сигта 24 контролера 10. Такі дані можуть бути виконального входу п'ятої порогової схеми 130; виходи ристані для зміни нахилу антени або підвищення п'ятого суматора 124 приєднані до сигнального точності вимірювання координат виявлених об'єквходу третьої схеми придушення 128 першого тів. входу четвертого помножувача 126 та сигнального Таким чином, запропоноване вдосконалення входу четвертої порогової схеми 129; другий вихід виявника сигналів суттєво спрощує його технічну третього помножувача 125 підключено до першого реалізацію та покращує показники радіолокаційної виходу четвертого датчика коефіцієнтів 131, а висистеми щодо виявлення у складній радіолокаційхід третього помножувача 125 приєднано до опорній обстановці сигналів, відбитих від об'єктів, що ного входу четвертої порогової схеми 129; другий становлять інтерес. вихід четвертого помножувача 126 підключено до Блок-схема РЛС відповідно до п.2 формули другого входу четвертого датчика коефіцієнтів корисної моделі 131, а вихід четвертого помножувача 126 приєдБлок-схема радіолокаційної системи наведена нано до опорного входу п'ятої порогової схеми на фігурі 1, розгорнуті блок-схеми окремих скла130; керуючий вхід другої схеми придушення 127 дових частин РЛС, як то приймальнопідключено до виходу четвертої порогової схеми передавального пристрою та пристрою цифрової 129; керуючий вхід третьої схеми придушення 128 обробки сигналів наведені відповідно на фігурах 2, підключено до виходу п'ятої порогової схеми 130; 3, а блок-схема вдосконаленого обчислювача повходи шостого суматора 121 приєднані до виходів точного рівня завад наведена на фігурі 6. другої 127 та третьої 128 схем придушення; входи До складу обчислювача поточного рівня завад п'ятого помножувача 120 підключено до п'ятого введені такі пристрої: перший 112, другий 115, датчика коефіцієнтів 119 та першого виходу шостретій 125, четвертий 126 та п'ятий 120 помножутого суматора 124; вихід п'ятого помножувача 120 вачі; третій 113, четвертий 123, п'ятий 124 та шосприєднано до другого сигнального входу комутатий 121 суматори; третя 117, четверта 129 та п'ята тора 118; другий вихід шостого суматора 121 підк130 порогові схеми; друга 114 та третя 122 схеми лючено до входу відповідного за порядковим нозатримки; комутатор 118; третій 111, четвертий мером обчислювача порогового рівня від шуму. 131, п'ятий 119 та шостий 116 датчики коефіФункціонування РЛС згідно з п.2 формули коцієнтів. рисної моделі 41 19788 42 Функціонування РЛС згідно з п.2 формули коперешкодно проходить через схему придушення рисної моделі збігається з функціонуванням кори128 до першого входу шостого суматора 121. сної моделі згідно з п.1 формули за винятком такоДруга напівсума з першого виходу четвертого го. Схема відбору максимуму (наприклад, схема суматора 124 помножується помножувачем 125 на 79) має три виходи. Сигнали з першого виходу коефіцієнт, який задається четвертим датчиком схеми відбору максимуму надходять до першого коефіцієнтів 131, й використовується в якості поровходу третього суматора 113 й інтегруються в колі гового рівня четвертої порогової схеми 129. До з позитивним оберненим зв'язком: з першого висигнального входу четвертої порогової схеми 129 з ходу третього суматора 113 через схему затримки другого виходу п'ятого суматора 124 надходить 114 на період повторювання зондувань, через пеперша напівсума, яка порівнюється з встановлерший помножувач 112, який за даними датчика ним порогом. коефіцієнтів 111 встановлює глибину оборотного Якщо перша напівсума перевищує пороговий зв'язку, сигнали надходять до другого входу трерівень, на виході порогової схеми 129 формується тього суматора 113. Рівень інтегрованих сигналів з бінарна одиниця, яка використовується для бландругого виходу третього суматора 113 помножукування другої напівсуми схемою придушення 127. ється на коефіцієнт, який задається шостим датЯкщо перша напівсума не перевищує порогочиком коефіцієнтів 116, й використовується в якосвий рівень, на виході порогової схеми 129 бінарна ті порогового рівня для порогової схеми 117, на одиниця не формується, й друга напівсума безпесигнальний вхід якої надходять сигнали з другого решкодно проходить через схему придушення 128 виходу схеми відбору максимуму. до другого входу шостого суматора 121. Якщо вхідний сигнал не перевищує пороговий Обидві напівсуми (якщо якась не бланкується) рівень, сигнал з третього виходу схеми відбору складаються суматором 121 й формують таким максимуму проходить через перший вхід комутачином рівень, пропорційний поточному рівню затора 118 на його вихід. вад в каналі. Якщо вхідний сигнал перевищує пороговий ріЦей рівень помножується помножувачем 120 вень, на виході порогової схеми 117 формується на коефіцієнт, який задається п'ятим датчиком бінарна одиниця, яка використовується для підккоефіцієнтів 119, а результат використовується в лючення другого входу комутатора 118 до його якості середнього рівня завад в елементі розрізвиходу. нення за відстанню для заміни за допомогою коЗ виходу комутатора 118 сигнали надходять мутатора 118 сигналів великого рівня від близько до другої схеми затримки 122 з відгалуженнями. розташованого об'єкта. Відгалуження розподілені таким чином. Перша З другого виходу шостого суматора сигнали сукупність відгалужень (яка складає, наприклад, 8 надходять до обчислювача підсумкових порогових відгалужень), які розташовані послідовно один за рівнів (наприклад, обчислювача 90), де використоодним та являють собою випереджуючі відліки вуються в якості першої складової порогового рівсигналів, підключаються до входів п'ятого суматоня. ра 124 (першого напівсуматора), на виході якого Таким чином, запропоноване вдосконалення формується перша напівсума відліків. Друга сукуобчислювача поточного рівня завад забезпечує пність відгалужень (яка складає, наприклад, теж 8 підвищену точність визначення рівня завад для відгалужень), які розташовані послідовно один за подальшого більш точного розрахунку порогових одним та являють собою запізнюючі відліки сигнарівнів та покращання якісних показників радіололів, підключаються до входів четвертого суматора каційної системи щодо виявлення сигналів, відби123 (другого напівсуматора), на виході якого фортих від об'єктів, у складній радіолокаційній обстамується друга напівсума відліків. Між першою та новці. другою сукупністю відліків сигналів розташовуєтьБлок-схема РЛС відповідно до п.3 формули ся декілька відгалужень (наприклад, два відгалукорисної моделі ження, що відповідає трьом елементам розрізненБлок-схема радіолокаційної системи наведена ня з відстані), які формують "прогалину" навколо на фігурі 1, розгорнуті блок-схеми окремих скламожливого розташування корисного сигналу. дових частин РЛС, як то приймальноПерша напівсума з першого виходу п'ятого супередавального пристрою та пристрою цифрової матора 124 помножується помножувачем 126 на обробки сигналів наведені відповідно на фігурах 2, коефіцієнт, який задається четвертим датчиком 3, а блок-схема вдосконаленого пристрою цифрокоефіцієнтів 131, й використовується в якості порової обробки сигналів наведена на фігурі 7. гового рівня п'ятої порогової схеми 130. До складу пристрою цифрової обробки сигнаДо сигнального входу п'ятої порогової схеми лів 4-2 введені такі пристрої: сьомий 134 датчик 130 з другого виходу четвертого суматора 123 коефіцієнтів; датчик параметрів зондувальних сигнадходить друга напівсума, яка порівнюється з налів 133; датчик кутової швидкості обертання встановленим порогом. антени 135; датчик ширини променя антени 136; Якщо друга напівсума перевищує пороговий датчик періоду повторювання зондування 137; рівень, на виході порогової схеми 130 формується обчислювач розмірності перетворення 138 та оббінарна одиниця, яка використовується для бланчислювач вагових коефіцієнтів 139. кування першої напівсуми схемою придушення Перелічені пристрої з'єднані таким чином: ке128. руючі входи першого 55 та другого 56 оптимальЯкщо друга напівсума не перевищує порогоних фільтрів підключені до датчика параметрів вий рівень, на виході порогової схеми 130 бінарна зондувальних сигналів 133; керуючі входи першого одиниця не формується, й перша напівсума без57 та другого 58 фільтрів черезперіодної компен 43 19788 44 сації підключені до шостого датчика коефіцієнтів 3, а блок-схема вдосконаленого фрагменту при134; входи обчислювача розмірності перетворення строю цифрової обробки сигналів наведена на 138 підключені до датчика кутової швидкості оберфігурі 8. тання антени 135; до датчика ширини променя До складу фрагмента пристрою цифрової обантени 136 та датчика періоду повторювання зонробки сигналів 4-2 введено такі пристрої: першу дування 137; керуючі входи першого 59 та другого схему управління 132; третій 141 та четвертий 142 60 обчислювачів швидкого перетворення Фур'є та обчислювачі швидкого перетворення Фур'є, первхід обчислювача вагових коефіцієнтів 139 підкший 143 та другий 144 мультиплексори. лючено до виходів обчислювача розмірності переПерелічені пристрої з'єднані таким чином: третворення 138; керуючі входи першої 61 та другої тій обчислювач швидкого перетворення Фур'є 141 62 схем вагової обробки підключено до виходів включено паралельно першому обчислювачу обчислювача вагових коефіцієнтів 139. швидкого перетворення Фур'є 59; четвертий обчиФункціонування РЛС згідно з п.3 формули кослювач швидкого перетворення Фур'є 142 включерисної моделі но паралельно другому обчислювачу швидкого Функціонування РЛС згідно з п.3 формули коперетворення Фур'є 60; виходи першого 59 та трерисної моделі збігається з функціонуванням коритього 141 обчислювачів швидкого перетворення сної моделі згідно з п.1, або з п.2 формули за виФур'є підключено до входів першого мультиплекнятком такого. сора 143, вихід якого підключено до першої схеми Дані датчика параметрів зондувальних сигнавагової обробки 61; виходи другого 60 та четверлів 133 використовуються для програмного управтого 142 обчислювачів швидкого перетворення ління тривалістю, шириною смуги частот та типом Фур'є підключено до входів другого мультиплексозондувальних сигналів при їх формуванні на перера 144, вихід якого підключено до другої схеми дачу пристроєм 34 та відповідно узгодженого провагової обробки 62; керуючі входи мультиплексограмного управління параметрами оптимальних рів 143, 144 підключено до виходів першої схеми фільтрів 55 та 56. управління 132; входи першої схеми управління Дані сьомого датчика коефіцієнтів 134 викори132 підключені до синхронізатора 33 та четвертого стовуються для зміни коефіцієнтів у схемах черезвиходу обчислювача розмірності перетворення періодного придушення 57 та 58 й відповідної змі138. ни їх частотних та перехідних характеристик в Функціонування РЛС згідно з п.4 формули козалежності від поточних параметрів завад. рисної моделі Відповідним вибором коефіцієнтів можливо Функціонування РЛС згідно з п.4 формули конавіть відключення функції черезперіодного пририсної моделі збігається з функціонуванням коридушення, наприклад в зонах вільних від завад зесної моделі згідно з п.1, або з п.2, або п., формули мної поверхні. за винятком такого. Дані датчика кутової швидкості обертання анСигнали з виходів першої 57 та другої 58 схем тени 135, датчика ширини променя антени 136 та черезперіодної компенсації розгалужуються. Пердатчика періоду повторювання зондувань 137 више розгалуження першої схеми черезперіодної користовуються для розрахунку обчислювачем компенсації 57 підключено до першого обчислю138 розмірності перетворення згідно з співвідновача ШПФ 59. Перше розгалуження другої схеми шенням: черезперіодної компенсації 58 підключено до другого обчислювача ШПФ 60. Друге розгалуження 1 1 ЦІЛЕ (по модулю2) ( * * А ), першої схеми черезперіодної компенсації 57 підключено до третього обчислювача ШПФ 141. Друге де - ширина променя антени, градуси; розгалуження другої схеми черезперіодної компе- кутова швидкість обертання антени, грансації 58 підключено до другого обчислювача дуси/секунда; ШПФ 142. TA - періоду повторювання зондувань, секунди. Виходи першого 59 та третього 141 обчислюОбчислена розмірність використовується в вачів ШПФ підключено відповідно до першого та якості даних для управління режимом роботи обдругого сигнальних входів мультиплексора 143. числювачів швидкого перетворення Фур'є 59 і 60 Виходи другого 60 та четвертого 142 обчислювачів та розрахунку коефіцієнтів вагової обробки в обШПФ підключено відповідно до першого та другого числювачі 139. сигнальних входів мультиплексора 144. Виходи Таким чином, запропоноване вдосконалення першого 143 та другого 144 мультиплексорів підкпристрою цифрової обробки сигналів забезпечує лючені відповідно до першої 61 та другої 62 схем підвищену гнучкість управління параметрами та вагової обробки. Керуючі входи першого 143 та режимами роботи запропонованої радіолокаційної другого 144 мультиплексорів підключено відповідсистеми та можливість її адаптації до швидкопно до першого та другого виходів першої схеми линних умов радіолокаційної обстановки, що суткерування 132, входи якої з'єднано з виходом синтєво покращує її характеристики в умовах складної хронізатора 33 та виходом обчислювача розмірнорадіолокаційної обстановки. сті перетворення 138. Блок-схема РЛС відповідно до п.4 формули Дані розмірності ШПФ N від обчислювача розкорисної моделі мірності перетворення 138 надходять до першої Блок-схема радіолокаційної системи наведена схеми керування 132, яка будує часову сітку почена фігурі 1, розгорнуті блок-схеми окремих скларгової роботи обчислювачів ШПФ таким чином. дових частин РЛС, як то приймальноВ кінці зондування з порядковими номерами N, передавального пристрою та пристрою цифрової 3N, 5N, 7N, і так далі схема керування 132 видає обробки сигналів наведені відповідно на фігурах 2, 45 19788 46 команди третьому 141 та четвертому 142 обчисВ кінці робочою відстані перед випромінюванлювачам ШПФ - обнулитися та почати обчислення ням зондувальних сигналів з порядковими номеШПФ. рами 0; 2N; 4N; 6N і так далі перша схема управВ кінці зондування з порядковими номерами ління 132 видає команди на обнуління 2N, 4N, 6N, 8N, і так далі схема керування 132 виобчислювачів ШПФ 59 та 60 й подальший початок дає команди першому 59 та другому 60 обчислюобчислення поточного перетворення Фур'є. На вачам ШПФ -обнулитися та почати обчислення фігурі 9 команди обнуління позначені в рядках 59 ШПФ. та 60 товстими вертикальними відрізками. На зондуваннях з порядковими номерами від В кінці робочою відстані перед випромінюван(N+1) до 2N, від (3N+1) до 4N, від (5N+1) до 6N, і ням зондувальних сигналів з порядковими нометак далі схема керування 132 видає команди: рами N; 3N; 5N; 7N і так далі перша схема управпершому мультиплексору 143 - передавати дані з ління 132 видає команди на обнуління виходу першого обчислювача ШПФ 59; другому обчислювачів ШПФ 141 та 142 й подальший почамультиплексору 143 - передавати дані з виходу ток обчислення поточного перетворення Фур'є. На другого обчислювача ШПФ 60. фігурі 9 такі команди позначені в рядках 141 та 142 На зондуваннях з порядковими номерами товстими вертикальними відрізками. від(2N+1) до 3N, від (4N+1) до 5N, від (6N+1) до Видача даних обчислювачів ШПФ ілюструєть7N, і так далі схема керування 132 видає команди: ся в рядках, що позначені як 143/1(59); 144/1(60); першому мультиплексору 143 - передавати дані з 143/2(141); 144/2(142) й означають передачу давиходу третього обчислювача ШПФ 141; другому них відповідно від обчислювачів 59; 60; 141 та 142. мультиплексору 143 - передавати дані з виходу Застосування алгоритму поточного обчисленчетвертого обчислювача ШПФ 142. ня швидкого перетворення Фур'є дозволяє суттєво Таке почергово використання обчислювачів підвищити ймовірність виявлення об'єктів та підШПФ дає змогу використовувати обчислювальне вищити точність відліку їх координат, тобто суттєефективний алгоритм поточного обчислення швиво покращити основні показники радіолокаційної дкого перетворення Фур'є (ПШПФ) й уникнути насистеми. копичення значних обчислювальних похибок. Блок-схема РЛС відповідно до п.5 формули Алгоритм поточного обчислення швидкого пекорисної моделі ретворення Фур'є (ПШПФ): Блок-схема радіолокаційної системи наведена Fq(p)=Fq-1(p)+N-1*[f(q)-f(q-N)]*WN-pq, на фігурі 1, розгорнуті блок-схеми окремих складе р - порядковий номер частотного каналу обчисдових частин РЛС, як то приймальнолювача ШПФ (р=0, .... N-1); передавального пристрою та пристрою цифрової q - порядковий номер зондування (q=0, 1,2,...); обробки сигналів наведені відповідно на фігурах 2, Fq(p) - результат ПШПФ у р-ому частотному 3, а блок-схема вдосконаленого приймальноканалі після q-ого зондування; передавального пристрою наведена на фігурі 9. f(q) - q-ий відлік на вході обчислювача ПШПФ; До складу приймально-передавального приWN-pq - ваговий помножувач ПШПФ з розмірністрою 4-1 введенітакі пристрої: генератор колистю N. вань опорної частоти 145; перший помножувач [Краковский В.Я. "Алгоритмы и устройства частоти 147 в якості генератора коливань частоти скользящего анализа спектра". Труды 1-ой междудискретизації 21; другий помножувач частоти 148 народной конференции "Цифровая обработка сигв якості когерентного гетеродина 19; перший подіналов и ее применения". Том 1,с. 108-112льник частоти 146 в якості формувача коливань DSPA'98.- Москва, 1998]. тактової частоти 22; до складу першого стабільноЧасовий розклад почергової роботи обчислюго гетеродина 19 введено: перший синтезатор чавачів ШПФ ілюструється фігурою 9. стоти 149; перший керований генератор 150; друКоманди першої схеми управління 132 в інтегий подільник частоти 151; датчик номера частоти рвалах зондувань з порядковими номерами від 153; перший розподілювач 152; перший 154 та (N+1) до 2N; від (3N+1) до 4N; від (5N+1) до 6N і другий 156 підсилювачі; четверту схему часової так далі надходять до керуючих входів мультиплеселекції 155; до складу другого стабільного гетексорів 143 та 144, підключають перші їх входи до родина 23 введено: другий синтезатор частоти їх виходів й забезпечують проходження даних об157; другий керований генератор 158; другий 159 числювачів 59 та 60 для подальшої обробки. На та третій 161 розподілювачі; третій підсилювач фігурі 9 рядки таких команд позначені як 132/1, а 160; п'яту схему часової селекції 162. рядки проходження даних - як 143/1(59) та Перелічені пристрої з'єднані таким чином: ви144/1(60). ходи генератора коливань опорної частоти 149 Команди першої схеми управління 132 в інтепідключено відповідно до перших входів першого рвалах зондувань з порядковими номерами від 149 та другого 157 синтезаторів частоти, до входів (2N+1) до 3N; від (4N+1) до 5N; від (6N+1) до 7N і першого 147 та другого 148 помножувачів частоти так далі надходять до керуючих входів мультиплета до входу подільника частоти 146; другий вхід ксорів 143 та 144, підключають другі їх входи до їх першого синтезатора частоти 149 з'єднано з виховиходів й забезпечують проходження даних обчидом другого подільника частоти 151; третій вхід слювачів 141 та 142 для подальшої обробки. На першого синтезатора частоти 149 з'єднано з датфігурі 9 рядки таких команд позначені як 132/2, а чиком номера частоти 153; вихід першого синтезарядки проходження даних - як 143/2(141) та тора частоти 149 з'єднано зі входом першого ке144/2(142). рованого генератора 150; вихід якого підключено до входу першого розподілювача 152; перший ви 47 19788 48 хід першого розподілювача 152 з'єднано зі входом коливань, приводить різницю частот до нуля. Кодругого подільника частоти 151; другий вихід перефіцієнт поділення частоти вхідних коливань у шого розподілювача 152 через перший підсилювач синтезаторі частоти 149 задається датчиком но154 та четверту схему часової селекції 155 з'єднамера частоти 153. Таким чином формуються висоно з гетеродинним входом другого передавальноко стабільні коливання з частотою, яка програмне го перетворювача частоти 38; третій вихід першозмінюється. го розподілювача 152 через другий підсилювач Коливання частоти керованого генератора 150 156 з'єднано з гетеродинним входом першого розгалужуються в першому розподілювачі 152 на приймального перетворювача частоти 43; вихід три виходи: коливання з першого виходу через другого синтезатора частоти 157 приєднано до подільник частоти 151 надходять до синтезатора входу другого керованого генератора 158, а вихід частоти 149; а з інших двох використовуються в останнього з'єднано зі входом другого розподілюякості коливань першого стабільного гетеродина вача 159; перший вихід другого розподілювача 159 (позиція 28 на фігурі 2). з'єднано з другим входом другого синтезатора З другого виходу першого розподілювача 152 частоти 157; другий вихід другого розподілювача коливання першого стабільного гетеродина підси159 через третій підсилювач 161 з'єднано зі вхолюються першим підсилювачем 154 та через четдом третього розподілювача 161; перший вихід верту схему часової селекції 155 надходять до третього розподілювача 161 через п'яту схему гетеродинного входу другого передавального печасової селекції 162 з'єднано з гетеродинним вхоретворювача частоти 38 тільки на час проходжендом першого передавального перетворювача часня передавальних зондувальних сигналів. У паутоти 36; другий вихід третього розподілювача 161 зах між зондуваннями четверта схема часової з'єднано з гетеродинним входом другого приймаселекції 155 не пропускає гетеродинні коливання, льного перетворювача частоти 45; керуючі входи що забезпечує придушення шуму та паразитних четвертої 155 та п'ятої 162 схем часової селекції сигналів. Керування четвертою схемою часової підключено до відповідних виходів синхронізатора селекції 155 здійснюється від синхронізатора 33. 33. З третього виходу першого розподілювача 152 Функціонування РЛС згідно з п.5 формули коколивання першого стабільного гетеродина підсирисної моделі люються другим підсилювачем 156 та безпосереФункціонування РЛС згідно з п.5 формули кодньо надходять до гетеродинного входу першого рисної моделі збігається з функціонуванням кориприймального перетворювача частоти 38. сної моделі згідно з п.1, або з п.2, або п.3, або п.4 З п'ятого виходу генератора 145 коливання формули за винятком такого. опорної частоти надходять до першого входу друКоливання опорної частоти генератора 145 гого синтезатора частоти 157. До другого входу (наприклад, частоти 10МГц) надходять до п'яти другого синтезатора частоти 157 через другий його виходів. розподілювач 159 надходять коливання від другоЗ першого виходу генератора 145 коливання го керованого генератора 158. Частота коливань опорної частоти надходять до першого помножуопорної частоти порівнюється з частотою коливача частоти 148 (який, наприклад, збільшує часвань другого керованого генератора 158, поділетоту у три рази), вихідні його коливання (наприною у програмне зазначене число разів у самому клад, частоти 30МГц) використовуються в якості синтезаторі частоти. Розбіжність частот виявляколивань частоти когерентного гетеродина (позиється у вигляді напруги певного рівня та полярносція 29 на фігурі 2). ті після частотно-фазового детектування коливань З другого виходу генератора 145 коливання та подальшого інтегрування. Ця напруга приклаопорної частоти надходять до першого подільника дається до входу керованого генератора 158 й, частоти 146 (який, наприклад, зменшує частоту у змінює частоту його коливань й приводить різницю два рази), вихідні його коливання (наприклад, часчастот до нуля. Таким чином формуються високо тоти 5 МГц) використовуються в якості коливань стабільні коливання, які використовуються в якості тактової частоти (позиція 30 на фігурі 2). коливань другого стабільного гетеродина (позиція З третього виходу генератора 145 коливання 32 на фігурі 2). опорної частоти надходять до другого помножуваКоливання частоти керованого генератора 158 ча частоти 147 (який, наприклад, збільшує частоту розгалужуються в другому розподілювачі 159 на у чотири рази), вихідні його коливання (наприклад, два виходи. З другого виходу другого розподілючастоти 40МГц) використовуються в якості коливача 159 гетеродинні коливання підсилюються вань частоти дискретизації (позиція 31 на фігурі 2). третім підсилювачем 160 й розгалужуються на два З четвертого виходу генератора 145 коливанвиходи в третьому розподілювачі 161. ня опорної частоти надходять до першого входу З першого виходу третього розподілювача 161 першого синтезатора частоти 149. Частота коликоливання другого стабільного гетеродина через вань опорної частоти порівнюється з частотою п'яту схему часової селекції 162 надходять до геколивань першого керованого генератора 150, теродинного входу першого передавального переподіленою у два рази подільником частоти 151 та творювача частоти 36 тільки на час проходження у програмне зазначене число разів у самому синпередавальних зондувальних сигналів. У паузах тезаторі частоти. Розбіжність частот виявляється у між зондуваннями п'ята схема часової селекції 162 вигляді напруги певного рівня після частотнофане пропускає гетеродинні коливання, що забезпезового детектування коливань та подальшого інтечує придушення шуму та паразитних сигналів. Кегрування. Ця напруга прикладається до входу керування п'ятою схемою часової селекції 162 здійсрованого генератора 150 й, змінюючи частоту його нюється від синхронізатора 33. 49 19788 50 З другого виходу третього розподілювача 161 модулів забезпечує підвищену надійність передаколивання другого стабільного гетеродина безповального пристрою через слабку залежність вихідсередньо надходять до гетеродинного входу друного рівня потужності від відмови деяких модулів гого приймального перетворювача частоти 45. (при належному виборі типу НВЧ суматора 169). Запропоноване вдосконалення забезпечує виКрім того, при використанні напівпровідникосоку когерентність радіолокаційної системи та , як вих модулів немає потреби у високовольтних дженаслідок, умови для високоефективного придурелах живлення, які мають обмежену надійність та шення завад та ефективного накопичення енергії створюють підвищену небезпеку ураження обслусигналів, відбитих від об'єктів, що становлять інтеговуючого персоналу електричним струмом. Більрес. ше того, при використанні напівпровідникових моБлок-схема напівпровідникового вихідного педулів відсутнє рентгенівське випромінювання, яке редавального підсилювача відповідно до п.6 форпритаманне електровакуумним підсилювачам та мули подана на фігурі 11. модуляторним лампам великої потужності та яке До складу напівпровідникового вихідного пестворює певні проблеми при експлуатації. редавального підсилювача 40 належать такі приТаким чином, застосування напівпровідникострої (фігура 11): напівпровідниковий модуль пового вихідного передавального підсилювача сутпереднього підсилення 163; четвертий тєво підвищує надійність радіолокаційної системи розподільник 164; К передавальних напівпровіднита безпечність її використання. кових підсилювальних модулів 165 - 168; вихідний Блок-схема управління багаторежимною робоНВЧ суматор. тою РЛС відповідно до п.7 формули подана на Перелічені пристрої з'єднані таким чином: вхід фігурі 12а. напівпровідникового модуля попереднього підсиДо складу РЛС додатково введено другу схему лення 163 підключено до виходу третього передауправління 170, яка має двосторонній зв'язок з вального підсилювача 39, а його вихід - до входу синхронізатором 33 та підключена до входу датчичетвертого розподільника 164; виходи розподілька параметрів зондувальних сигналів 133. ника приєднано до входів передавальних напівпФункціонування РЛС згідно з п.7 формули коровідникових підсилювальних модулів 165-168, а рисної моделі їх виходи - до входів НВЧ суматора 169; вихід суФункціонування РЛС згідно з п.7 формули коматора 169 є виходом вихідного передавального рисної моделі збігається з функціонуванням корипідсилювача 40, його підключено до першого вхосної моделі згідно з п.6 формули за винятком таду антенного перемикача 41. кого. Функціонування РЛС згідно з п.6 формули коПередавальні напівпровідникові підсилювачі рисної моделі мають суттєву особливість: їх імпульсна вихідна Пристрій працює таким чином: зондувальні сипотужність обмежена, тому для збереження енергнали малого рівня потужності надходять від трегетичного потенціалу радіолокаційної системи нетього передавального підсилювача 39 до входу обхідно значно збільшувати тривалість зондуванапівпровідникового модуля попереднього підсильних сигналів, тобто використовувати РЛС з лення 163, підсилюються та розгалужуються на малою (4-6) шпаруватістю випромінювань. В той декілька напрямків, в кожному з яких встановлено же час, збереження потрібної роздільної здатності передавальний напівпровідниковий підсилювальсистеми за відстанню забезпечується відповідним ний модуль (наприклад, модуль 165). В кожному збільшенням ширини смуги частот зондувальних передавальному напівпровідниковому підсилювасигналів. льному модулі підсилюється відповідна частина Але значна тривалість зондувальних сигналів зондувального сигналу. Підсилені зондувальні призводить до значних мертвих зон на початку сигнали з кожного виходу передавального напівпрозгортки за відстанню. Наприклад, при зоні дії ровідникового підсилювального модулю надходять РЛС до 30км та шпаруватості 5 мертва зона стадо входів НВЧ суматора 169 й когерентно складановитиме 6 км, тобто мертва зона є занадто веються. На виході НВЧ суматора 169 формується ликою. зондувальний сигнал великого рівня потужності. Для зменшення мертвої зони пропонується Цей рівень прямо пропорційний кількості передапочергове використання тривалих та коротких зовальних напівпровідникових підсилювальних мондувальних сигналів. Наприклад, довгий зондувадулів, за відрахуванням втрат у НВЧ суматорі 169, льний сигнал тривалістю 200мкс чергується з коякі обумовлені розсіюванням енергії в його елемеротким зондувальним сигналом тривалістю 2мкс. нтах та розбіжністю фаз і амплітуд сигналів на В такому разі мертва зона РЛС не перевищуватийого входах. ме 300м. Таким чином, вихідний рівень потужності заСхематично почергове випромінювання зонбезпечується когерентним складанням потужності дувальних сигналів показано на фігурі 126 в ряддекількох однакових передавальних напівпровідку U. никових підсилювальних модулів (невеликої потуСигнали короткої тривалості випромінюються жності). Необхідність використання напівпровіднив інтервали часу, умовно позначені як інтервали 0кового модуля попереднього підсилення 163 1; 4-5. Сигнали довгої тривалості випромінюються залежить від необхідної вихідної потужності та в інтервали часу, умовно позначені як інтервали 2конкретних параметрів передавальних напівпрові3; 6-7. дникових підсилювальних модулів. Сигнали короткої тривалості приймаються в Велика кількість паралельно включених переінтервали часу, умовно позначені як інтервали 1-2; давальних напівпровідникових підсилювальних 5-6. Сигнали довгої тривалості приймаються в ін 51 19788 52 тервали часу, умовно позначені як інтервали 3-4; тотою 171 в інтервалах часу 2-4; 6-8 включається 7-8. (Позиція 8 на фігурі 126 не показана). частота f2. (Позиція 8 на фігурі 12б не показана). Мертві зони РЛС відповідають інтервалам чаТаким чином, введення додаткових пристроїв су випромінювання зондувальних сигналів. та відповідних зв'язків для забезпечення почергоТривалість прийому довгих сигналів забезпевої зміни типу зондувальних сигналів та їх несучої чує перекриття заданої зони за відстанню. Тривачастоти дозволяє суттєво зменшити мертву зону лість прийому коротких сигналів забезпечує перерадіолокаційної системи та забезпечити безперекриття мертвої зони за відстанню. Відповідні шкодну роботу у відповідні інтервали часу. імпульси початку та кінця робочої відстані надхоБлок-схема антени РЛС відповідно до п.9 дять від синхронізатора 33 до приймальноформули подана на фігурі 14а. передавального пристрою 4-1, пристрою цифрової Антенна РЛС має у своєму складі відбиваюче обробки сигналів 4-2, виявника сигналів 5 та придзеркало 173 та лінійний хвилеводно-щілинний строю відліку координат 6. випромінювач 172. Покажемо енергетичну обґрунтованість такого Функціонування РЛС згідно з п.9 формули корежиму. рисної моделі. Наприклад, якщо при використанні зондувальАнтенне відбиваюче дзеркало 173 опромінюного сигналу тривалістю 200мкс при виявленні ється електромагнітним полем, яке формується сигналу від об'єкту на відстані 30км забезпечуєтьхвилеводно-щілинним випромінювачем 172. ся відношення рівня сигналу до рівня шуму десь Останній виконано таким чином, що забезпечуєтьбіля 50 (тобто 17дБ), то при виявленні сигналу від ся спеціальний амплітудно-фазовий розподіл поля такого ж об'єкту на відстані 6 км буде забезпечено в площині випромінювача (наприклад, за законом відношення рівня сигналу до рівня шуму біля Тейлора). 31500 (тобто 45дБ), що перевищує потрібну велиЕлектромагнітне поле з таким розподілом почину майже у 600 разів. падає на поверхню дзеркала 173, відбивається й При використанні зондувального сигналу триформує у просторі промінь з низьким рівнем бічних валістю 2мкс при виявленні сигналу від об'єкту на пелюсток у площині випромінювача ["Антенны и відстані 6 км буде забезпечено відношення рівня устройства СВЧ (Проектирование фазированных сигналу до рівня шуму десь біля 315 (тобто 25дБ), антенных решеток)". Під ред. проф. що перевищує потрібну величину майже у 6 разів. Д.И.Вознесенського. Москва, видавництво "Радио В розглянутому прикладі зменшення тривалои связь", 1981]. Для мобільних систем найбільш сті зондувального сигналу майже в 100 або більше прийнятними є легкі й відносно прості дзеркальні разів забезпечує скорочення мертвої зони РЛС в антени. Але при застосуванні у дзеркальній антені таку ж кількість разів. традиційно простих випромінювачів (рупорних або Таким чином, використання багаторежимної вібраторних) забезпечити такий низький рівень роботи РЛС з почерговою зміною тривалості зонбічних пелюсток при ефективному використанні дувальних сигналів та зон дії за відстанню дозвоповерхні відбиваючого дзеркала практично немоляє суттєво зменшити мертву зону в РЛС з напівпжливо. ровідниковим передавальними підсилювачами. Застосування лінійних випромінювачів дозвоБлок-схема управління багаторежимною роболяє належним чином управляти розподілом електтою РЛС відповідно до п.8 формули подана на ромагнітного поля по довжині випромінювача, що фігурі 12а. забезпечує необхідний рівень бічних пелюсток, До складу РЛС додатково введено третю схеефективне використання поверхні відбиваючого му управління 171, вхід якої підключено до другої дзеркала та суттєво спрощує його форму: можлисхеми управління 170, а вихід - до схеми признаво використовувати форму параболічного циліндчення номера частоти 153. ра замість параболічної поверхні подвійної кривиФункціонування РЛС згідно з п.8 формули козни. Найбільш технологічним у застосуванні можна рисної моделі вважати хвилеводно-щілинний випромінювач, який Функціонування РЛС згідно з п.8 формули коявляє собою узгоджений на кінці хвилевід з нарірисної моделі збігається з функціонуванням коризаними відповідним чином випромінюючими щілисної моделі згідно з п.7 формули за винятком танами. кого. Таким чином, використання лінійного хвилевоПочергова зміна зондувальних сигналів може дно-щілинного випромінювача забезпечує низький спричинити небажаний взаємний вплив при прирівень бічних пелюсток і, як наслідок, підвищений йомі сигналів у сусідніх інтервалах роботи РЛС. захист від завад. Синхронна почергова зміна несучої частоти Схема антени РЛС відповідно до п.10 формувипромінюваних сигналів дозволяє уникнути таколи подана на фігурі 14б. го впливу та забезпечити безперешкодний прийом Антенна РЛС має у своєму складі відбиваюче сигналів. дзеркало 173 та лінійний хвилеводно-щілинний Схематично почергово випромінювання зонвипромінювач 172. дувальних сигналів з різною несучою частотою Функціонування пристрою згідно з п.10 форпоказано на фігурі 12б в рядку f1-f2. При формумули корисної моделі ванні, випромінюванні та прийомі коротких сигнаФункціонування пристрою згідно з п.10 форлів за допомогою схеми управління частотою 171 мули корисної моделі збігається з функціонуванв інтервалах часу 0-2; 4-6 включається частота f1. ням корисної моделі згідно з п.9 формули за виняПри формуванні, випромінюванні та прийомі довтком такого. гих сигналів за допомогою схеми управління час 53 19788 54 При застосуванні хвилеводно-щілинних виТаким чином, розташування вісі випромінювапромінювачів для забезпечення належного ступеча під певним кутом до твірної відбиваючої поверню узгодженості вісь променя повинна відхилятись хні дзеркала забезпечує випромінювання у напряна деякий кут від нормалі до вісі випромінювача мку, співпадаючому з віссю антени, суттєво ["Антенны и устройства СВЧ (Проектирование фазменшує відхилення та спотворення променя під зированных антенных решеток)". Під ред. проф. значними кутами місця та дозволяє покращити Д.И.Вознесенського. Москва, видавництво "Радио точність визначення координат виявлених об'єктів. и связь", 1981]. Величина кута відхилення може Функціонування РЛС згідно з п.11 формули костановити декілька ширин променя в площині куррисної моделі сових кутів. Функціонування РЛС згідно з п.11 формули коПри невеликих кутах підйому вісі променя над рисної моделі збігається з функціонуванням коригоризонтальною площиною таке відхилення досної моделі згідно з п.1, або п.2, або п.3, або п.4, сить просто врахувати. або п.5, або п.6, або п.7, або п.8, або п.9, або п.10 На фігурі 13а показано розтин променя на рівформули за винятком такого. ні половинної потужності при ширині 1° по курсоВ складній радіолокаційній та метеорологічній вому куту та 10° по куту місця і при куті підйому вісі обстановці використання в РЛС міліметрового на 5°. Відхилення вісі променя по курсовому куту діапазону значно обмежує робочу відстань виявскладає 2,25°, форма променя майже симетрична, лення об'єктів, що становлять інтерес, через значвелика вісь променя майже вертикальна. Компенну уразливість до завад від метеорологічних утвосація відхилення по курсовому куту вимагає просрень та великого питомого послаблення того його врахування у відповідному обчислювачі. міліметрових хвиль в атмосфері. При значних кутах підйому променя над гориВикористання в РЛС дециметрового діапазону зонтальною поверхнею становище суттєво усклахвиль дозволяє уникнути згаданих недоліків міліднюється. Змінюється положення променя в коорметрового діапазону, але суттєво обмежує можлидинатах "курсовий кут - кут місця", змінюється його вості виявлення об'єктів на вкрай невеликих висоформа, збільшується його ширина по курсовому тах, погіршує точність визначення кутових куту, та з'являється суттєвий нахил великої вісі координат об'єктів та приводить до значних розміпроменя. рів антен, що може стати на заваді при розміщенні На фігурі 13б показано розтин променя на ріврадіолокаційної системи на мобільних носіях. ні половинної потужності при ширині 1° по курсоВикористання сантиметрового діапазону довому куту та 10° по куту місця і при куті підйому вісі зволяє знайти відповідний компроміс у параметрах на 44,9°. Відхилення вісі променя по курсовому радіолокаційної системи при її використанні на куту складає 3,128°, ширина по курсовому куту мобільних носіях. 1,52°, велика вісь променя відхилена від вертикалі Використання радіохвиль сантиметрового діамайже на 8°, а форма променя дещо спотворена. пазону, зокрема частот від 8 до 10ГГц, дозволяє Всі ці зміни суттєво утруднюють точне визначення забезпечити прийнятні характеристики виявлення курсового куту виявленого об'єкту, особливо в об'єктів, що становлять інтерес, в широкому діапаумовах невизначеності його кута місця та при зміні зоні висот та в складній радіолокаційній та метеоробочою частоти РЛС, й неможливою повну їх рологічній обстановці та прийнятні характеристики компенсацію. по габаритам та масі системи для її використання Найбільш прийнятним є спосіб усунення почана мобільних носіях. ткового відхилення вісі променя від вісі антени. Використання сукупності перелічених істотних Для його реалізації необхідно ввести відхилення ознак за пунктами 1-11 формули корисної моделі лінійного випромінювача від твірної відбивної позабезпечує покращення основних характеристик верхні дзеркала на кут, який дорівнює куту відхимобільної радіолокаційної системи: суттєве знилення вісі променя від нормалі до вісі випромінюження рівня потужності випромінюваних сигналів, вача з відповідним знаком. підвищення ефективності накопичення енергії На фігурі 146 схематично показано варіант таприйнятих сигналів, підтримання частості хибних кої антени з таким розташуванням випромінювача тривог на постійному рівні та підвищення достовіта дзеркала антени. Оскільки поверхня дзеркала є рності виявлення об'єктів у складній радіолокаційнормальною до напрямку розповсюдження електній обстановці та при дії інтенсивних завад різного ромагнітних хвиль, а згідно з законом геометричпоходження. ної оптики кут падіння променя дорівнює куту його У відповідності з пропозиціями, викладеними в відбиття від дзеркальної поверхні, то електромагзаявці на корисну модель, було створено досліднітні хвилі відбиваються у напрямку, який є норманий зразок мобільної радіолокаційної системи та льний до поверхні дзеркала, тобто співпадає з проведені її натурні випробування, які повністю віссю антени. підтвердили можливість її реалізації та досягнення очікуваного позитивного ефекту. 55 19788 56 57 19788 58 59 Комп’ютерна верстка Н. Лисенко 19788 Підписне 60 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar system
Автори англійськоюHuz Volodymyr Ivanovych, Lipatov Valerii Pavlovych, Butyrin Anatolii Viktorovych, Bilokoz Sеrhіі Sеrhііоvусh, Zaitsev Anatolii Yakymovych, Torgonskyi Volodymyr Vasyliovych, Filkevych Oleksandr Sergiiovych, Кhоmеnко Mykola Vasyliovych, Pironer Yan Mykhailovych
Назва патенту російськоюРадиолокационная система
Автори російськоюГузь Владимир Иванович, Липатов Валерий Павлович, Бутырин Анатолий Викторович, Билокоз Сергей Сергеевич, Зайцев Анатолий Акимович, Торгонский Владимир Васильевич, Филькевич Александр Сергеевич, Хоменко Николай Васильевич, Пиронер Ян Михайлович
МПК / Мітки
МПК: G01S 13/02
Мітки: радіолокаційна, система
Код посилання
<a href="https://ua.patents.su/30-19788-radiolokacijjna-sistema.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційна система</a>
Пасивно-активна радіолокаційна система
Номер патенту: 12292
Опубліковано: 16.01.2006
Автори: Хоменко Микола Васильович, Білановський Михайло Миколайович, Ліпатов Валерій Павлович, Білокоз Сергій Сергійович, Бутирін Анатолій Вікторович, Єна Григорій Олександрович, Біличенко Іван Іванович, Гузь Володимир Іванович, Толстіхін Микола Вікторович, Шовгун Віталій Андрійович, Андрусенко Микола Іванович
МПК: G01S 13/86
Мітки: система, радіолокаційна, пасивно-активна
Формула / Реферат:
1. Пасивно-активна радіолокаційна система, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, антену компенсації бокового випромінювання, антену компенсації фонового випромінювання, приймач компенсації бокового випромінювання, приймач компенсації фонового випромінювання, блок порівняння та блок аналізу, при...
Радіолокаційна станція
Номер патенту: 42179
Опубліковано: 15.10.2004
Автори: Піза Дмитро Макарович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
МПК: G01S 13/00, G01S 13/42, G01S 7/36
Мітки: станція, радіолокаційна
Формула / Реферат:
Радіолокаційна станція, що містить дуально-поляризовану гостроспрямовану антену і всеспрямовану антену, з`єднані з відповідними каналами приймання, пристрої компенсації завад та обробки сигналів і індикатор, яка відрізняється тим, що станція додатково містить перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, тривходову схему І, тригер, комутатори каналів та двоканальний комутатор, керівний вхід якого...
Автоматизована система контролю
Номер патенту: 60890
Опубліковано: 15.10.2003
Автор: Кучмієв Володимир Гавриїлович
МПК: G06F 11/30
Мітки: контролю, система, автоматизована
Формула / Реферат:
Автоматизована система контролю, що містить шину вхідних даних, об'єкт контролю, шину вихідних даних, схему порівняння, причому шина вхідних даних з'єднана з входами об'єкта контролю, виходи якого з'єднані з шиною вихідних даних, яка відрізняється тим, що має перший та другий формувачі настройок, блок керування, перший та другий універсальні алгоритмічні перетворювачі, запам'ятовуючий пристрій, причому шина вхідних даних з'єднана з першою...
Фазометр

Номер патенту: 17394
Опубліковано: 15.09.2006
Автори: Гончар Сергій Феодосійович, Рудик Вадим Данилович
МПК: G01R 25/00
Мітки: фазометр
Формула / Реферат:
Фазометр, який містить перший і другий диференціатори, причому входи першого та другого диференціаторів підключені до вхідних каналів фазометра, а їх виходи з'єднані з входами другого та першого підсилювачів-обмежувачів відповідно, які виходами підключені до входів першого тригера, перший і другий детектори, які включені між виходами підсилювачів-обмежувачів і входами схеми співпадання, вихід якої через послідовно з'єднані другий тригер і...
Відмовостійка система з аналізом ресурсу
Номер патенту: 15201
Опубліковано: 15.06.2006
Автори: Кулік Тамара Васильовна, Кулік Анатолій Степанович, Дергачов Володимир Андрійович
МПК: G06F 11/18
Мітки: відмовостійка, аналізом, система, ресурсу
Формула / Реферат:
Відмовостійка система з аналізом ресурсу, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, перший двійковий лічильник, перший і другий елементи АБО, n детекторів фронту, n детекторів спаду, виходи індикації технічного стану, причому вихід і-го блока, що резервується, з'єднаний з першим входом і-го елемента I, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І,...