Радіолокаційна станція
Номер патенту: 42179
Опубліковано: 15.10.2004
Автори: Мокеєв Юрій Геннадійович, Немчин Олександр Федорович, Піза Дмитро Макарович
Формула / Реферат
Радіолокаційна станція, що містить дуально-поляризовану гостроспрямовану антену і всеспрямовану антену, з`єднані з відповідними каналами приймання, пристрої компенсації завад та обробки сигналів і індикатор, яка відрізняється тим, що станція додатково містить перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, тривходову схему І, тригер, комутатори каналів та двоканальний комутатор, керівний вхід якого підключений до першого виходу пристрою синхронізації, вихід дуально-поляризованої антени та вихід комутатора каналів з`єднані, відповідно, з першим та другим каналами прийому, виходи яких підключені попарно до двоканального комутатора сигналів пеленгаційного пристрою, виходи двоканального комутатора підключені до основного і допоміжного каналів автокомпенсатора, вихід пеленгаційного пристрою і вихід автокомпенсатора з`єднані з входами пристрою обробки сигналів, вихід пристрою обробки сигналів з`єднаний з індикатором, другий вхід пеленгаційного пристрою з`єднаний з сигнальним входом першого і опорним входом другого порогових елементів, виходи яких з`єднані з першим і другим входами тривходової схеми І, третій вхід якої приєднаний до інверсного виходу тригера, а вхід підключений до входу встановлення нуля тригера, інформаційний його вхід з`єднаний з виходом другого порогового елемента, керівний його вхід приєднаний до керуючих входів автокомпенсатора та пристрою обробки сигналів і підключений до другого виходу пристрою синхронізації, а вихід тригера з`єднаний з керуючим входом двоканального комутатора.
Текст
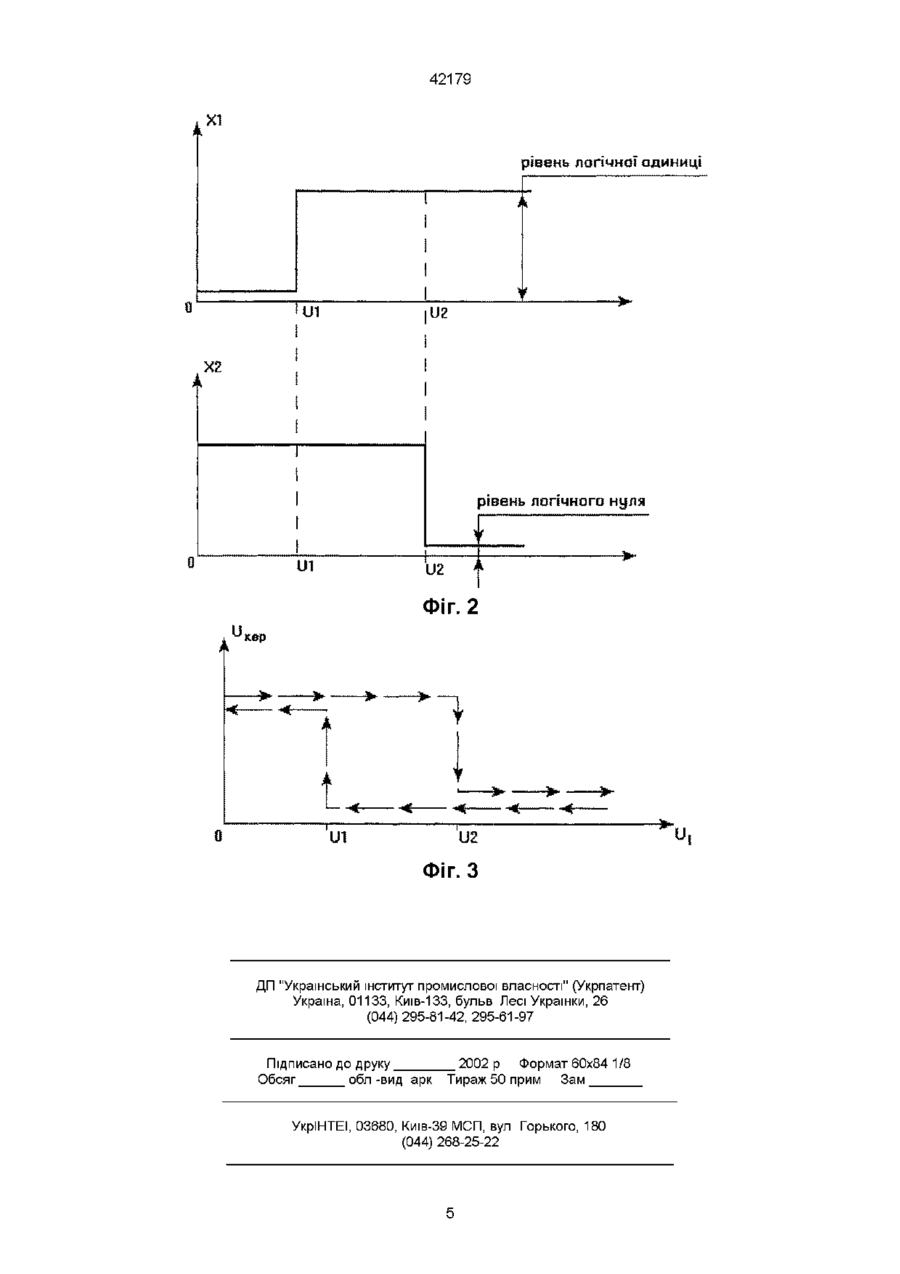
Радіолокаційна станція, що містить дуальнополяризовану гостроспрямовану антену, всеспрямовану антену, поєднані з ВІДПОВІДНИМИ каналами приймання, пристрої компенсації завад та обробки сигналів, індикатор, яка відрізняється тим, що станція додатково містить у своєму складі перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, тривходову схему І, тригер, комутатори каналів та двоканальний комутатор, керівний вхід якого підключений до першого виходу пристрою синхронізації, вихід дуальнополяризованої антени та вихід комутатора каналів сполучені ВІДПОВІДНО з першим та другим канала ми прийому, виходи яких підключені попарно до двоканального комутатора сигналів пеленгаційного пристрою, виходи двоканального комутатора підключені до основного і допоміжного каналів автокомпенсатора, вихід пеленгаційного пристрою і вихід автокомпенсатора сполучені з входами пристрою обробки сигналів, вихід пристрою обробки сигналів сполучений з індикатором, другий вхід пеленгаційного пристрою сполучений з сигнальним входом першого і опорним входом другого порогових елементів, виходи яких поєднані з першим і другим входами тривходової схеми І, третій вхід якої приєднаний до інверсного виходу тригера, а вихід підключений до входу встановлення нуля тригера, інформаційний його вхід сполучений з виходом другого порогового елемента, керівний його вхід приєднаний до керуючих входів автокомпенсатора та пристрою обробки сигналів і підключений до другого виходу пристрою синхронізації, а вихід тригера сполучений з керуючим входом двоканального комутатора Відомий адаптивний компенсатор активних завад в складі радіолокатора, за патентом США №4544926, кл G01S7/36, 1985 Приймач цього пристрою приймає віддзеркалені сигнали ЦІЛІ СПІЛЬНО з сигналами активних перешкод Прийом сигналів здійснюється двома антенами, що мають взаємно ортогональну лінійну поляризацію Ці антени пов'язані з двома приймальними каналами, в кожному з яких є компенсатор із зворотним зв'язком, що заглушує перешкоду і виділяє віддзерка калені сигнали ЦІЛІ І, навпаки, корисні сигнали великої протяжності такий компенсатор буде по давлювати, як завади Недоліки відомого рішення частково переборені в найбільш близькому за технічною сутністю радіолокаторі в складі завадозахищеної радіолокаційної станції виявлення цілей, за пат РФ №2040006, кл G01S13/02, 7/36, 1995, що містить дві рознесені по висоті горизонтальні дуально поляризовані антени, кожна з яких з'єднана зі входом ВІДПОВІДНОГО каналу приймання, пристрій компенсації завад, послідовно поєднані суматор, детектор, відеопідсилювач та індикатор, де до виходу кожного з каналів приймання послідовно підключені амплітудний обмежувач та вузькосмуговии підсилювач проміжної частоти, виходи останніх з'єднані зі входами суматора При спільному, комбінованому впливі активних і пасивних завад ефективність роботи РЛС виявляється недостатньою Це пояснюється тим, що моменти підстроювання поляризаційного базису у ВІДОМІЙ РЛС не прив'язуються до моментів закінчення інтервалу когерентної обробки сигналів в пристрої обробки сигналів Внаслідок цього пачка сигналів, що когерентно обробляється, виявляєть лені-сигнали ЦІЛІ ДЛЯ виявлення ЦІЛІ вибирають канал, в якому інтенсивність сигналу вища Істотним недоліком цього пристрою є те, що він не може заглушити прицільні радюзавади, тривалість яких рівна або менша тривалості імпульсу зондувального сигналу РЛС Це пояснюється тим, що для автоматичного настроювання в режим подавления перешкоди в процесі роботи адаптивний компенсатор затрачує час, що перевищує тривалість імпульсу віддзеркаленого сигналу ЦІЛІ У результаті цей сигнал не буде подавлений компенсатором, а тривала в часі завада ефективно подавлюється Активні перешкоди у вигляді радіоімпульсів короткої тривалості такий компенсатор заглушити не встигає, так само, як і короткі віддзер о> 42179 ся модульованою, когерентність сигналів порушується і виділення корисних сигналів на фоні пасивної компоненти комбінованої завади, що реалізовується в пристрої обробки сигналів, істотно гіршає В основу винаходу поставлена задача підвищення ефективності роботи РЛС в умовах спільного впливу активних і пасивних завад Зазначена задача вирішується тим, що в радіолокаційній станції, яка містить дуально поляризовану гостроспрямовану антену, всеспрямовану антену, поєднані з ВІДПОВІДНИМИ каналами приймання, пристрої компенсації завад та обробки сигналів, індикатор, згідно з винаходом, станція додатково містить у своєму складі перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, трьохвходову схему І, тригер, комутатори каналів та двохканальний комутатор, керівний вхід якого підключений до першого виходу пристрою синхронізації, вихід дуально-поляризодавої антени та вихід комутатора каналів сполучені ВІДПОВІДНО з першим та другим каналами прийому, виходи яких підключені попарно до двохканального комутатора сигналів пеленгаційного пристрою, виходи двохканального комутатора підключені до основного і допоміжного каналів автокомпенсатора, вихід пеленгаційного пристрою і вихід автокомпенсатора сполучені з входами пристрою обробки сигналів, вихід пристрою обробки сигналів сполучений з індикатором, другий вихід пеленгаційного пристрою сполучений з сигнальним входом першого і опорним входом другого порогових елементів, виходи яких поєднані з першим і другим входами трьохвходової схеми І, третій вхід якої приєднаний до инверсного виходу тригера, а вихід підключений до входу встановлення нуля тригера, інформаційний його вхід сполучений з виходом другого порогового елемента, керівний його вхід приєднаний до керуючих входів автокомпенсатора та пристрою обробки сигналів і підключений до другого виходу пристрою синхронізації, а вихід тригера сполучений з керуючим входом двохканального комутатора Суть винаходу пояснюється фігурами креслень, де на фіг 1 подана структурна схема пристрою, що пропонується Епюри керуючих сигналів наведені на фіг 2 та З Згідно креслень, РЛС містить гостроспрямовану дуально-поляризовану антену 1 і всеспрямовану антену 2 Вихід всеспрямованої антени 2 і один з виходів дуально-поляризованої антени 1 сполучені ВІДПОВІДНО з першим та другим входом комутатора каналів 3, керівний вхід якого підключений до першого виходу пристрою синхронізації Другий вихід дуально-поляризованої антени 1 та вихід комутатора каналів 3 сполучені ВІДПОВІДНО З першим 4 і другим 5 каналами прийому Канали 4 та 5 сполучені з двохканальним комутатором сигналів 6 РЛС також має індикатор 7 Виходи першого 4 і другого 5 каналів прийому підключені попарно до двохканального комутатора сигналів 6 і пеленгаційного пристрою 8 Керівний вхід комутатора каналів 3 підключений до першого виходу пристрою синхронізації 9 Виходи двохканального комутатора 6 підключені до основного і допоміжного каналів автокомпенсатора 10 Вихід пеленгаційного пристрою 8 і вихід автокомпенсатора 10 сполу чені зі входами пристрою обробки сигналів 11 Вихід пристрою обробки сигналів 11 сполучений з індикатором 7 радіолокаційної станції Другий вихід пеленгаційного пристрою 8 сполучений з сигнальним входом першого 12 і опорним входом другого 13 порогових елементів Виходи порогових елементів 12 і 13 сполучені з першим і другим входами трьовходової схеми І 14, третій вхід якої приєднаний до інверсного виходу тригера 15, а вихід підключений до входу установки нуля тригера 15 Інформаційний вхід тригера 15 сполучений з виходом другого порогового елемента 13, керуючий вхід тригера 15 сполучений з керуючими входами автокомпенсатора 10 і пристрою обробки сигналів 11 і підключений до другого виходу пристрою синхронізації 9 Вихід тригера 15 сполучений з керуючим входом двохканального комутатора 6 Наведена структурна схема пристрою відображає найбільш ІСТОТНІ його ознаки Практична реалізація структурних ланок радіолокаційної станції може бути здійснена тим або іншим чином в залежності від конкретних технічних вимог, що пред'являються до пристрою взагалі Наприклад, пеленгаційний пристрій 8, що входить до складу РЛС, може бути реалізований у ВІДПОВІДНОСТІ ЗІ структурною схемою, наведеною в [1], мал 18 21 або мал 18 23 Як автокомпенсатор завад 10 в РЛС, що пропонується, переважніше використати схемне рішення, описане в роботі [4], с 212-217 Цей автокомпенсатор в опорному колі і в колі зворотного зв'язку корелятора містить режекторні фільтри Наявність режекторних фільтрів в колах формування керуючих напружень, що використовуються для регулювання вагового підсилювача, дозволяє позбутися пасивного компонента комбінованої завади у вихідному сигналі корелятора і, тим самим, забезпечити вибіркову роботу автокомпенсатора по активному компоненту комбінованої завади Адаптацію вагових коефіцієнтів автокомпенсатора переважніше виконувати в проміжках між інтервалами когерентної обробки сигналів в пристрої СДЦ, що входить в пристрій обробки сигналів 11 Це може реалізовуватися, наприклад, в дискретному режимі самонастроювання автокомпенсатора 10 під керуванням пристрою синхронізації 9 Особливості практичної реалізації окремих блоків радюлокаційниоі станції визначаються також алгоритмом и роботи, який наведений нижче РЛС працює насткпним чином У вихідному стані на робочій ДІЛЬНИЦІ дистанції (тобто протягом інтервалу часу, коли в РЛС використовується інформація, яка міститься в сигналах, відображених від цілей, що розпізнаються) прийняті гостроспрямованою дуально-поляризованою антеною 1 віддзеркалені сигнали і сигнали завад через комутатор каналів 3, перший 4 і другий 5 канали прийому і двохканальний комутатор 6 надходять на основний і допоміжний канали автокомпенсатора 10 При рівності інтенсивності активної складової комбінованої завади в каналах прийому 4 і 5 (що реалізовується в першому особливому базисі (див [2], поз (2 5 14)-(2 5 16)), або при перевищенні завади у допоміжному каналі автокомпенсатора завад 10, реалізується високе заглушення активної завади, що діє в основному каналі Сигнали, прийняті дуально-поляризаційною антеною 1, надходять також на входи пеленгаційного пристрою 8 В розглянутій 42179 ситуації при рівності інтенсивності завадових сигналів в каналах або при перевищенні завади на виході другого (компенсаційного) приймача 5, на виходах пеленгаційного пристрою 8 сигнал відсутній При збільшенні рівня завадового сигналу на виході першого приймача 4 відносно вихідного сигналу другого приймача 5 ефективність заглушення завад в автокомпенсаторі 10 меншає, а на другому виході пеленгаційного пристрою з'являється сигнал U|_, який збільшується при збільшенні різниці рівнів сигналу в каналах прийому До моменту появи сигналу на другому виході пеленгаційного пристрою 8 другий пороговий елемент 13, (на опорний вхід якого подається вихідний сигнал пеленгаційного пристрою 8) формує сигнал Х2 з рівнем логічної одиниці (див фіг 3) Цей рівень в моменти, що визначаються керуючим сигналом, який надходить з пристрою синхронізації 9, записується в тригер 15 При цьому двохканальний комутатор 6 знаходиться в початковому сталому стані Після досягнення вихідним сигналом U_ пеленгаційного | пристрою 8 рівня, що дорівнює значенню порога Ui на виході першого порогового елемента 12 (сигнал XI) відбувається перехід з рівня логічний 0 на рівень логічної 1 При цьому сигнал на виході схеми І 14 не формується, і стан тригера 15, що визначається вихідним сигналом другого порогового елемента 13, залишається незмінним (одиничним) Після досягнення вихідним сигналом пеленгаційного пристрою 8 рівня, що дорівнює значенню порога ІІ2, на виході другого порогового елемента 13 формується рівень логічного 0 Через інформаційний вхід тригера 15 сигнал з рівнем логічного 0 записується в тригер Запис проводиться при наявності ознаки кінця пачки, що когерентно обробляється, який надходить з другого виходу пристрою синхронізації 9 на керуючий вхід тригера 15, пристрою обробки сигналів 11 і автокомпенсатора 10 Вихідний сигнал тригера 15 перемикає двоканальний комутатор 6 в інший стійкий стан При цьому відносна інтенсивність завадового сигналу в основному каналі РЛС стає меншою, а ВІДПОВІДНО, ефективність заглушення завад зростає При цьому при наближенні поляризаційних параметрів завади до параметрів, що характеризують другий особливий базис, енергетична різниця завадових сигналів в каналах зростає {[2], рівняння (2 5 24)}, що сприяє більш надійному формуванню сигналу на виході пеленгаційного пристрою 8 Це забезпечує ефективне заглушення завад з довільною поляризацією Віддзеркалені сигнали на фоні ослаблених активних завад надходять на пристрій обробки сигналів 11, в якому відбувається подальша обробка і об'єднання радіолокаційних і пеленгаційних сигналів Подальша обробка радіолокаційних сигналів в пристрої обробки сигналів 11 полягає в когерентному накопиченні корисних сигналів, виділенні корисних сигналів на фоні пасивної складової комбінованої завади, а також у вирішенні процедури виявлення корисних сигналів Причому за рахунок прив'язки моменту підстроювання поляризаційного базису до моменту закінчення обробки когерентної пачки в РЛС забезпечується висока ефективність виділення корисних сигналів на фоні пасивних завад При зменшенні рівня завадового сигналу на виході першого приймача 4 відносно вихідного сигналу другого приймача 5 (або при флуктуаціях вихідного сигналу пеленгаційного пристрою 8 порушується умова U L >U 2 (див фіг 2) і на виході другого порогового елемента 13 відбувається перехід з рівня логічного 0 до рівня логічної 1 Але при цьому на виході тригера 15 продовжує формуватися рівень логічного 0 Це пояснюється тим, що в момент спрацювання другого порогового елемента 13 на всіх входах схеми І 14 формуються рівні логічної 1, - на її виході також виникає одиничний рівень, який встановлює тригер 15 в нульовий стан При подальшому зменшенні відносного рівня завадового сигналу на вході першого приймача 4 порушується умова UL>Ui при цьому на виході першого порогового елемента 12 відбувається перехід з рівня логічної 1 до рівня логічний 0 В цьому випадку на виході схеми І 14 формується низький рівень, і при надходженні чергового керуючого імпульсу з другого виходу пристрою синхронізації 9 на виході тригера 15 встановлюється одиничний рівень, що повертає двохканальний комутатор 6 в початковий стан Епюри керуючих сигналів, що характеризуються гістерезисом перемикання, в залежності від збільшення (зменшення) вихідного сигналу пристрою пеленгації 8 U_ наведені на фіг 3 Стрілка| ми, направленими праворуч і вниз, показана динаміка зміни сигналу, керуючого роботою двохканального комутатора 6, при відносному збільшенні рівнів сигналів на виході приймача 4 Стрілками, направленими ліворуч і вгору, показана динаміка зміни керуючого сигналу при зменшенні рівня завадового сигналу на виході приймача 4 На неробочій ДІЛЯНЦІ дистанції (тобто, в ті інтервали часу, коли інформація, що міститься в віддзеркалених сигналах, не використовується в РЛС) з першого виходу пристрою синхронізації 9 РЛС надходить сигнал (імпульс), по якому комутатор каналів 3 підключає на вхід другого каналу прийому 5 всеспрямовану антену 2 При цьому, ВІДПОВІДНО до відомого алгоритму роботи пеленгаційного пристрою 8 ([1], с 518), в РЛС може визначатися кутове положення (пеленг) постановника активної завади Це здійснюється по сигналу, що формується на першому виході пеленгаційного пристрою 8, в пристрої обробки сигналів 11 Надалі, після вивчення чергового зондувального імпульсу, робота поляризаційного пристрою заглушення завад, пеленгаційного пристрою 8 і пристрою обробки сигналів 11, що входять в склад РЛС, відбувається аналогічним чином Особливістю роботи РЛС, до складу якої входить поляризаційний пристрій подавления завад, що пропонується, є те, що пеленгаційна інформація, що формується на робочій ДІЛЬНИЦІ дистанції, коли до каналу прийому 5 через комутатор каналів 3 підключена гостроспрямована антена 1, бланкується (виключається) з обробки і не відображається на індикаторі Бланкування пеленгаційної інформації проводиться по сигналах пристрою синхронізації 9 Неспівпадання рівнів включення та вимкнення двохканального комутатора 6, що досягається 42179 шляхом введення в РЛС першого 12 і другого 13 порогового елемента, схеми І 14 та тригера 15, дозволяє виключити невизначеність стану двохканального комутатора 6 в процесі перемикання, а також виключити модуляцію пачки когерентних сигналів, що обробляються в пристрої обробки сигналів 11 Виключення багаторазового перемикання двохканального комутатора 6, що виникає, наприклад, під впливом флуктуації вихідного сигналу пристрою пеленгації, дозволяє позбутися циклічних перехідних процесів в автокомпенсаторі 10, і, як наслідок, на один-два порядки підвищити ефективність заглушення активної складової комбінованої завади в процесі переходу РЛС в ортогональний за поляризацією режим роботи Застосування винаходу дозволить поліпшити заглушення активних завад з довільною поляризацією при одночасному ефективному придушенні пасивної складаючої комбінованої завади Дискретне перемикання поляризації ВІДПОВІДНО до алгоритму роботи пристрою заглушення завад може бути здійснене як при спільному, залежному управлінні приймальним і передавальним поляризаційним базисом, так і при незалежному керуванні приймальним базисом РЛС У останньому випадку забезпечується скритність перебудови поляризації та значне зниження шерційності перемикання поляризації, оскільки при цьому комутації підлягають сигнали малої потужності Селекція корисних сигналів, в цьому випадку, можлива внаслідок сильної деполяризації відображених сигналів у ВІДПОВІДНОСТІ з поляризаційною матрицею розсіяння складної ЦІЛІ Так експериментальні дані підтверджують [3], що навіть при роботі на ортого нальних поляризаціях на прийом і передачу втрати в енергії корисного сигналу, віддзеркаленого від літака на хвилі довжиною 3,2 см, не перевищують 2-7 дБ Забезпечення скритності перебудови поляризаційного базису при адаптації приймального базису РЛС дозволяє підвищити ефективність поляризаційної селекції сигналів, особливо, при адаптації поляризаційних параметрів завадового сигналу Так, при ослабленні активної завади на 25 дБ енергетичний виграш у відношенні сигнал/завада становить 18-23 дБ Оскільки у разі адаптації завадового сигналу по поляризаційних параметрах зондувальних сигналів РЛС (реалізовується другий особливий базис) ефективність відомого пристрою заглушення завад падає до нуля, то у вартісному вираженні виграш, що досягається за рахунок застосування запропонованого технічного рішення, не може бути достатньо оцінений сумарною вартістю пристроїв, що реалізовують алгоритм відомого пристрою-прототипу Джерела інформації 1 Радиолокационные устройства / Под ред В В Григорина-Рябова - М Радио, 1970 - 6 0 3 с 2 Канарейкин Д М , Потехин В А, Шишкин И Ф Морская поляриметрия - М Судостроение, 1968 - 3 2 8 с 3 Антенны эллиптической поляризации / Под ред А И Шпунтова - М Иностр литература 1961 - 3 3 2 с 4 Fielding J G , Brandmood D H , Bnstow T A et al Adaptive interference cancellation in radar systems - International Conference Radar - 77, October, 1977 London, pp 212-217 9 » пристрій смшрсшіза цн ди передавача 4 перший канал прийому комір- arrop каналів 5 другий канал прийому індикатор 12 я перший пороговий елемент ФІГ. 1 42179 XI рівень логічної одиниці U1 м рівень ЛОГІЧНОГО нуля 1t U1 U2 і Фіг. 2 икер
ДивитисяДодаткова інформація
Назва патенту англійськоюRadar station
Автори англійськоюNemchyn Oleksandr Fedorovych, Mokeiev Yurii Hennadiiovych, Piza Dmytro Makarovych
Назва патенту російськоюРадиолокационная станция
Автори російськоюНемчин Александр Федорович, Мокеев Юрий Геннадьевич, Пиза Дмитрий Макарович
МПК / Мітки
МПК: G01S 13/00, G01S 7/36, G01S 13/42
Мітки: станція, радіолокаційна
Код посилання
<a href="https://ua.patents.su/5-42179-radiolokacijjna-stanciya.html" target="_blank" rel="follow" title="База патентів України">Радіолокаційна станція</a>
Центральна станція системи радіозв’язку з рухомими об’єктами
Номер патенту: 44130
Опубліковано: 15.01.2002
Автор: Білоусов Дмитро Олександрович
МПК: H04B 7/26
Мітки: рухомими, об'єктами, центральна, системі, станція, радіозв'язку
Формула / Реферат:
Центральна станція системи радіозв'язку з рухомими об'єктами, яка містить приймач, блок керування, блок пам'яті і з'єднані послідовно блок формування сигналу вмикання передавача та передавач, яка відрізняється тим, що введені блок замикання шлейфа, аналого-цифровий і цифро-аналоговий перетворювачі, комутатор ліній, детектор викличного сигналу, блок диференціальної розв'язки, перший і другий буферні підсилювачі, причому перший, другий, третій,...
Радіолокатор
Номер патенту: 42178
Опубліковано: 15.08.2003
Автори: Піза Дмитро Макарович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович
МПК: G01S 7/36, G01S 13/00, G01S 13/42
Мітки: радіолокатор
Формула / Реферат:
1. Радіолокатор, що містить послідовно з’єднані дуально-поляризовану антену, перемикач прийом/передача, перший канал приймання, пристрій компенсації завад, індикатор та передавач, а також другий канал приймання, підключений до другого виходу антени, який відрізняється тим, що він додатково має когерентний приймач, синхронізатор та послідовно з’єднані перший логарифмічний підсилювач, перший детектор, перший інтегратор, суматор,...
Станція передавальна і/або приймальна, наприклад телевізійна
Номер патенту: 30633
Опубліковано: 15.03.2002
Автори: Войтенко Олександр Григорович, Галич Віктор Миколайович, Наритник Теодор Миколайович
Мітки: наприклад, телевізійна, станція, передавальна, приймальна
Формула / Реферат:
1. Станція передавальна і/або приймальна, наприклад телевізійна, що вміщує передавальні і/або приймальні канали, виконані з можливістю перетворення відповідно інформаційних сигналів, наприклад повного телевізійного сигналу і сигналу звукового супроводу, в модульований або маніпульований радіосигнал, наприклад мовного телебачення на центральній несучій надзвичайно високій частоті (НВЧ) каналу і, навпаки, модульованого або маніпульованого...
Спосіб контролю каналу, базова станція, віддалена станція та пристрій для його здійснення
Номер патенту: 66928
Опубліковано: 15.06.2004
Автори: Джоу Ю-Чен, Тідеманн Едвард Г., мол.
МПК: H04B 7/005, H04B 17/00
Мітки: каналу, контролю, станція, спосіб, віддалена, базова, пристрій, здійснення
Формула / Реферат:
1. Спосіб контролю каналу, переданого в режимі переривчастої передачі, який включає: визначення, чи є кадр для передачі порожнім, і передачу контрольного кадру для кадру, де контрольний кадр не є порожнім кадром.2. Спосіб за п. 1, який відрізняється тим, що включає: передачу контрольного кадру, який містить заздалегідь визначені біти, відомі мобільній станції, і передається з найнижчою швидкістю передачі даних, узгодженою між базовою...
Пристрій визначення середнього рівня шуму за його відліками
Номер патенту: 55021
Опубліковано: 17.03.2003
Автори: Денека Анатолій Анатолійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Каспирович Олександр Генадійович
МПК: G01S 7/36, H04B 15/00
Мітки: відліками, шуму, рівня, середнього, визначення, пристрій
Формула / Реферат:
Пристрій визначення середнього рівня шуму за його відліками, що містить перший блок затримки, вхід і вихід якого з'єднані з відповідними входами схеми віднімання, вихід схеми віднімання з'єднаний з першим входом суматора, вихід якого з'єднаний із входом регістра, із входом другого блока затримки і з першим входом схеми відбору максимуму, причому вихід регістра з'єднаний із входом суматора, а вихід другого блока затримки з'єднаний з другим...
Попередній патент: Спосіб вирощування монокристала кремнію з розплаву
Наступний патент: Спосіб одержання адипінової кислоти
Випадковий патент: Керування променем і формування променя для широкосмугових мвмв/мвов-систем