Автоматизована система для відбору проб з насіння і спосіб витягання проби тканини з насіння
Номер патенту: 97797
Опубліковано: 26.03.2012
Автори: Депперманн Кевін, Кестель Анджела, Лістелло Дженніфер, Ран Філліп
Формула / Реферат
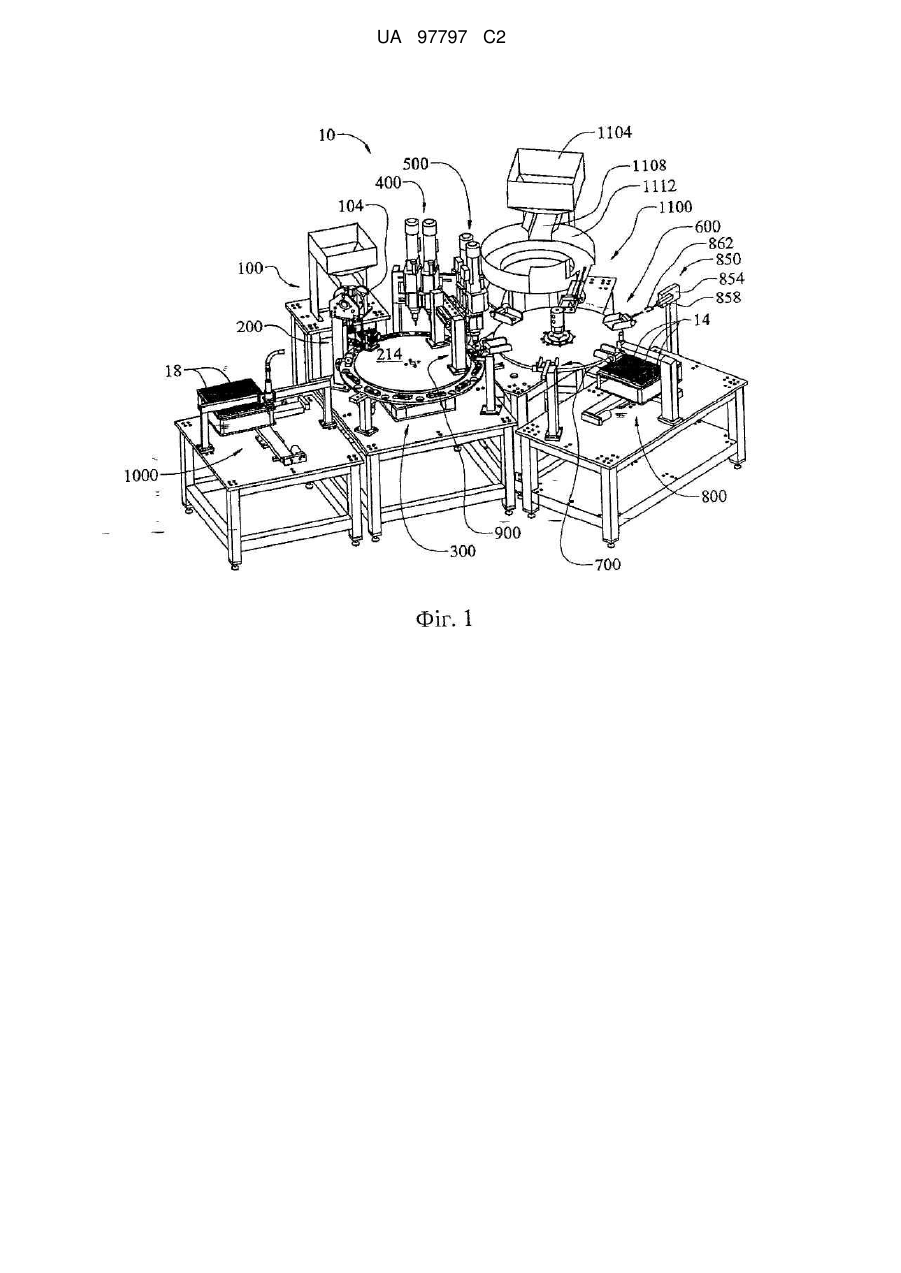
1. Автоматизована система для відбору проб з насіння, що містить:
станцію завантаження насіння, виконану з можливістю відділення насінини від множини насіння;
систему орієнтування, виконану з можливістю прийому відділеної насінини від станції завантаження насіння та орієнтування насінини; і
станцію відбору проб, виконану з можливістю прийому орієнтованої насінини і витягання проби тканини, яка містить матеріал насінини з орієнтованої насінини.
2. Система за п. 1, що додатково містить підсистему збору і транспортування проб для захоплення витягнутої проби в збірну трубку, встановлену на пристрої позиціонування збірної трубки підсистеми збору і транспортування проб.
3. Система за п. 2, що додатково містить станцію завантаження збірних трубок для відділення збірної трубки від множини подібних збірних трубок і кріплення збірної трубки на пристрої для позиціонування збірної трубки.
4. Система за п. 2, що додатково містить підсистему доставки рідини для доставки рідини в збірну трубку для змішування з відібраною пробою.
5. Система за п. 4, що додатково містить підсистему депонування проб для транспортування змішаної проби від підсистеми збору і транспортування проб до вибраного гнізда лотка для проб.
6. Система за п. 1, що додатково містить станцію обробки насіння для нанесення обробної речовини щонайменше на частину насінини, з якої була витягнута проба.
7. Система за п. 6, в якій обробний склад містить одне з полімеру або фунгіцидного герметику.
8. Система за п. 1, що додатково містить станцію очищення для видалення залишків матеріалу проби з тримача насінини, встановленого на поворотному столі підсистеми транспортування насіння після витягання проби з насінини і після транспортування цієї насінини у вибране гніздо лотка для насіння.
9. Система за п. 1, що додатково містить станцію очищення для видалення щонайменше частини матеріалу оболонки насінини з відділеної насінини.
10. Система за п. 9, що додатково містить підсистему транспортування насіння для транспортування відділеної насінини між станцією очищення та станцією відбору проб.
11. Система за п. 10, що додатково містить підсистему депонування насіння для транспортування відділеної насінини від підсистеми транспортування насіння у вибране гніздо в лотку для насіння після того, як з насінини була витягнута проба.
12. Система за п. 1, в якій система орієнтування містить у собі прилад формування зображень, виконаний з можливістю одержання щонайменше одного зображення насінини.
13. Система за п. 12, в якій прилад формування зображень містить у собі камеру.
14. Система за п. 12, в якій система орієнтування містить у собі пристрій орієнтування, виконаний з можливістю повороту насінини за вибором у бажану орієнтацію на підставі щонайменше одного зображення насінини, отриманого приладом формування зображень.
15. Система за п. 1, яка додатково містить підсистему транспортування насіння, виконану з можливістю транспортування орієнтованої насінини між системою орієнтування і станцією відбору проб.
16. Система за п. 15, в якій станція відбору проб виконана з можливістю витягання проби тканини з орієнтованої насінини, коли насінина розміщена в підсистемі транспортування насіння.
17. Система за п. 15, в якій підсистема транспортування насіння додатково виконана з можливістю транспортування орієнтованої насінини між станцією завантаження насіння і системою орієнтування.
18. Система за п. 1, яка додатково містить підсистему депонування проб, виконану з можливістю транспортування проби тканини від станції відбору проб в вибране гніздо лотка для проб.
19. Система за п. 1, яка додатково містить підсистему депонування насіння, виконану з можливістю транспортування насінини, з якої витягнута проба тканини, до вибраного гнізда в лотку для насіння.
20. Система за п. 1, яка додатково містить лоток для проб, виконаний з можливістю прийому зразка тканини, витягнутого з насінини в станції відбору проб.
21. Система за п. 1, яка додатково містить лоток для насіння, виконаний з можливістю приймання насінини, з якої витягнута проба.
22. Система за п. 1, в якій станція завантаження насіння містить у собі сепаруюче колесо для відділення насінини від множини насінин.
23. Система за п. 1, в якій система орієнтування містить у собі привід, виконаний з можливістю розташування насінини в бажаній орієнтації.
24. Система за п. 1, в якій система орієнтування містить у собі поворотний привід для орієнтування насінини.
25. Система за п. 1, в якій система орієнтування виконана з можливістю при функціонуванні орієнтувати насінину таким чином, що станція відбору проб витягає пробу тканини з бажаної частини насінини.
26. Автоматизований спосіб витягування проби тканини з окремих насінин, що включає етапи, при яких:
відділяють окремі насінини від множини насінин;
орієнтують окремі насінини;
витягають пробу тканини щонайменше з однієї з орієнтованих насінин,
причому етап орієнтування окремих насінин містить у собі етап, на якому орієнтують окремі насінини з використанням приводу, виконаного з можливістю розташування насіння у бажаній орієнтації.
27. Спосіб за п. 26, в якому етап витягання проби тканини додатково включає етап, на якому збирають пробу тканини у збірну трубку.
28. Спосіб за п. 27, в якому етап витягання проби тканини додатково включає етап, на якому доставляють рідину у збірну трубку для змішування з зібраною пробою тканини.
29. Спосіб за п. 28, який додатково включає етап, на якому транспортують змішану пробу тканини у вибране гніздо лотка для проб.
30. Спосіб за п. 26, який додатково включає етап, на якому завантажують орієнтовані насінини у тримач насінини автоматизованої системи відбору проб.
31. Спосіб за п. 30, який додатково включає етап, на якому орієнтують окрему насінину вершиною вниз.
32. Спосіб за п. 26, який додатково включає етап, на якому наносять обробний склад щонайменше на частину насінини, з якої була витягнута проба.
33. Спосіб за п. 32, який додатково включає етап, на якому видаляють залишки матеріалу проби з тримача насінини після того, як з насінини була витягнута проба тканини і насінина була транспортована до вибраного гнізда в лотку для насіння.
34. Спосіб за п. 26, в якому етап витягання проби тканини з щонайменше однієї орієнтованої насінини включає етап, на якому витягають пробу тканини з верхньої частини щонайменше однієї орієнтованої насінини.
35. Спосіб за п. 26, який додатково включає етап, на якому аналізують пробу тканини на одну або більше з характеристик, що вказують щонайменше на одну генетичну і/або хімічну ознаку.
36. Спосіб за п. 26, який додатково включає етап, на якому формують зображення окремих насінин.
37. Спосіб за п. 26, який додатково включає етап, на якому приймають пробу тканини в лотку для проб.
38. Спосіб за п. 26, який додатково включає етап, на якому приймають щонайменше одну насінину, з якої витягнута проба, у лотку для проб.
39. Спосіб за п. 26, в якому привід вибраний з групи, яка складається з пневматичного приводу і механічного приводу.
40. Спосіб за п. 26, який додатково включає етап, на якому транспортують орієнтовані насінини у тримачі насінини в станцію відбору проб для витягання проби тканини з щонайменше однієї з орієнтованих насінин.
41. Спосіб за п. 26, який додатково включає етап, на якому витягають пробу тканини з бажаної частини щонайменше однієї з орієнтованих насінин.
Текст
Реферат: Автоматизована система відбору проб з насіння, що містить станцію (400) очищення для видалення щонайменше частини матеріалу оболонки з насіння і станцію (500) відбору проб для витягання проби матеріалу насіння, з якого видалена оболонка. Підсистема (600) транспортування насіння транспортує насіння між станцією (400) очищення і станцією (500) відбору проб, а підсистема (1000) транспортує насіння від підсистеми (600) транспортування у вибране гніздо в лотку (18) для насіння після того, як з насіння була витягнута проба. UA 97797 C2 (12) UA 97797 C2 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід належить до систем і способів відбору проб з біологічного матеріалу, такого як насіння. У галузі розробки і поліпшення рослин рослини піддаються генетичним поліпшенням або шляхом селективного розведення, або шляхом маніпуляцій з генами і при отриманні бажаного поліпшення отримують комерційні кількості шляхом висівання і збору насіння протягом декількох поколінь. Не все насіння володіє необхідними ознаками і, тому, таке насіння треба відбракувати з популяції. Для прискорення процесу накопичення популяції, відбирають і тестують статистичні проби для відбракування з популяції насіння, в якому бажані ознаки виражені не адекватно. Однак статистична вибірка неминуче допускає збереження в популяції деякої кількості насіння, що не володіє потрібними ознаками і допускає можливість випадкового виключення деякої кількості насіння з необхідними ознаками з бажаної популяції. Заявка на патент США № 11/213,430 (подана 26 серпня 2005 p.); заявка на патент США №11/213,431 (подана 26 серпня 2005 p.); заявка на патент США № 11/213,432 (подана 26 серпня 2005 p.); заявка на патент США № 11/213,434 (подана 26 серпня 2005 p.); заявка на патент США № 11/213,435 (подана 26 серпня 2005 p.), які повністю включені в даний опис шляхом посилання, розкривають пристрій і систему для автоматизованого відбору проб з насіння і способи відбору проб, тестування і накопичення насіння. Однак щонайменше деякі відомі автоматизовані системи для відбору проб і тестування допускають того або іншого роду забруднення, що псують зібрані зразки і спотворюють результати. Отже, існує потреба в автоматизованій системі відбору проб з насіння по суті без забруднення. Даний винахід належить до систем і способів неруйнуючого відбору проб матеріалу з насіння. Способи особливо адаптовані для автоматизації, що дозволяє відбирати більше проб, ніж це було практично раніше. При автоматизованому, неруйнуючому відборі проб, що допускається щонайменше деякими варіантами даного винаходу, є можливість тестування кожної насінини в популяції і відбракування того насіння, яке не володіє бажаними ознаками. Це значно прискорює процес накопичення популяції даного насіння і може привести до поліпшення остаточної популяції. Різні варіанти даного винаходу дозволяють тестувати більшість насіння або все насіння популяції перед висівом, що дозволяє не затрачувати час і ресурси на вирощування рослин, що не володіють бажаними ознаками. Далі, різні варіанти дозволяють проводити автоматизований відбір проб з насіння не вносячи забруднень, тим самим по суті усуваючи схрещування між пробами. У різних варіантах даного винаходу пропонується автоматизована система відбору проб з насіння, яка містить станцію очищення для видалення щонайменше частини матеріалу оболонки з насіння, і станцію відбору проб для витягання проби матеріалу насіння після видалення матеріалу оболонки. Підсистема транспортування насіння переміщує насіння між станцією очищення і станцією відбору проб, а система депонування насіння транспортує насіння від підсистеми транспортування насіння у вибране гніздо в лотку для насіння після відбору проби з насіння. У різних інших варіантах даного винаходу пропонується автоматизована система відбору проб з насіння, що містить станцію очищення для видалення щонайменше частини матеріалу оболонки насіння і станцію відбору проб для витягання проби матеріалу насіння, оболонка якого видалена. Підсистема збору проб і транспортування захоплює витягнуту пробу в збірну трубку, встановлену на пристрої позиціонування збірної трубки підсистеми збору проб і транспортування. Додатково, підсистема депонування проб транспорту пробу від підсистеми збору проб і транспортування у вибране гніздо лотка для проб. У інших різних варіантах даного винаходу пропонується спосіб витягання матеріалу проби з насіння для тестування. Спосіб включає етапи, на яких завантажують насіння в тримач автоматизованої системи відбору проб з насіння, і видаляють щонайменше частину матеріалу оболонки насіння на станції очищення системи відбору проб з насіння. Потім на станції відбору проб системи відбору проб з насіння витягують пробу матеріалу насіння, з якого була видалена оболонка. Насіння, з якого була витягнута проба, транспортують у вибране гніздо лотка для насіння, використовуючи підсистему депонування насіння системи відбору проб. Витягнуту пробу одночасно транспортують у вибране гніздо, лотка для проб, використовуючи підсистему депонування проб системи відбору проб. Депоновану пробу потім можна тестувати на наявність щонайменше, однієї бажаної характеристики насіння. У інших варіантах даного винаходу пропонується автоматизована система для послідовного відбору матеріалу проб з множини насіння, не порушуючи життєздатності насіння. Система містить станцію очищення для послідовного видалення щонайменше частини матеріалу 1 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 оболонки насіння з кожної насінини, і станцію відбору проб для послідовного витягання матеріалу проб з кожної насінини, з якої була видалена оболонка. Підсистема транспортування насіння транспортує насіння між станцією очищення і станцією відбору проб, а підсистема депонування насіння послідовно транспортує кожну насінину від підсистеми транспортування насіння до вибраного одного з множини гнізд у вибраному одному з множини лотків для насіння. Система додатково містить підсистему збору і транспортування проб для послідовного захоплення витягнутої проби кожної насінини у відповідну збірну трубку, встановлену на одному з множини пристроїв позиціонування збірної трубки. Система додатково містить підсистему депонування проб для послідовного транспортування кожної проби від підсистеми збору і транспортування проб у вибране одне з множини гнізд у вибраному одному з множини лотків для проб. Системи і способи за даним винаходом дозволяють проводити автоматизований неруйнуючий відбір проб з насіння по суті без забруднення. Вони дозволяють тестувати і сортувати великі об'єми насіння, тим самим, прискорюючи накопичення популяції насіння з бажаними ознаками. Ці і інші ознаки і переваги будуть частково очевидні, а частково вказані в нижченаведеному описі. З опису, що приводиться нижче будуть очевидні і інші галузі застосування даного винаходу. Потрібно розуміти, що опис і конкретні, приклади призначені тільки для ілюстрації і не обмежують об'єм даного винаходу. Прикладені креслення є виключно ілюстративними і ніяким чином не обмежують об'єм даного винаходу. Фіг. 1 - вигляд в перспективі системи відбору проб з насіння за різними варіантами даного винаходу. Фіг. 2 - збільшений вигляд в перспективі станції завантаження насіння системи відбору проб на фіг. 1 за різними варіантами даного винаходу. Фіг. 3 - Збільшений вигляд в перспективі системи орієнтування насіння системи відбору проб на фіг. 1 за різними варіантами даного винаходу. Фіг. 4 - вигляд збоку системи орієнтування насіння на фіг. 3 згідно з різними варіантами даного винаходу. Фіг. 5 - вигляд в перспективі системи орієнтування насіння на фіг. 3, включаючи тримач насіння згідно з різними варіантами даного винаходу. Фіг. 6 - збільшений вигляд в перспективі тримача насіння на фіг. 5 згідно з різними варіантами даного винаходу. Фіг. 7 - збільшений вигляд збоку тримача насіння на фіг. 6 згідно з різними варіантами даного винаходу. Фіг. 8 - вигляд в перспективі станції очищення і підсистеми транспортування насіння системи відбору проб на фіг. 1 згідно з різними варіантами даного винаходу. Фіг. 9 - вигляд в перспективі станції відбору проб системи відбору проб з насіння на фіг. 1 згідно з різними варіантами даного винаходу. Фіг. 10 - збільшений вигляд збоку станції відбору проб, показаної на фіг. 9, під час роботи системи відбору проб на фіг. 1 згідно з різними варіантами даного винаходу. Фіг. 11 - вигляд збоку пристрої доставки рідини системи відбору проб на фіг. 1 у відведеному положенні, згідно з різними варіантами даного винаходу. Фіг. 12 - вигляд збоку пристрою доставки рідини, показаного на фіг. 11, у висуненому положенні, згідно з різними варіантами даного винаходу. Фіг. 13 - вигляд в перспективі платформи для лотка для проб системи відбору проб на фіг. 1 згідно з різними варіантами даного винаходу. Фіг. 14 - вигляд в перспективі станції обробки насіння системи відбору проб на фіг. 1. згідно з різними варіантами даного винаходу. Фіг. 15 - вигляд збоку транспортера насіння системи відбору проб на фіг. 1 згідно з різними варіантами даного винаходу. Фіг. 16 - вигляд в перспективі платформи для лотка для насіння системи відбору проб на фіг. 1, згідно з різними варіантами даного винаходу. Фіг. 17 - вигляд збоку станції завантаження збірної трубки системи відбору проб на фіг. 1, згідно з різними варіантами даного винаходу. Фіг. 18 - вигляд в перспективі підсистеми підготовки збірної трубки системи відбору проб на фіг. 1, згідно з різними варіантами даного винаходу. Фіг. 19 - вигляд в перспективі станції очищення системи відбору проб на фіг. 1 згідно з різними варіантами даного винаходу. Однакові деталі на різних кресленнях позначені однаковими посилальними позиціями. 2 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 Нижченаведений докладний опис є за своєю природою ілюстративним і ні яким чином не обмежує даний винахід або варіанти його застосування або використання. У всьому описі однакові деталі позначені однаковими посилальними позиціями. На фіг. 1 показана автоматизована система 10 відбору проб з насіння за різними варіантами даного винаходу. По суті, система 10 відбору проб з насіння містить станцію 100 завантаження насіння, станцію 200 орієнтування насіння, підсистему 300 транспортування насіння, станцію 400 очищення, станцію 500 відбору проб, підсистему 600 збору і транспортування проб, підсистему 700 доставки рідини, підсистему 800 депонування проб, станцію 900 Обробки насіння і підсистему 1000 депонування насіння. Система 10 відбору проб сконструйована і призначена для ізолювання насіння з жолоба 104 станції 100 завантаження насіння, орієнтування насіння на станції 200 орієнтування і перенесення насіння на станцію 400 очищення за допомогою підсистеми 300 транспортування. Система 10 відбору проб з насіння крім того сконструйована і призначена для видалення частини матеріалу оболонки насіння на станції 400 очищення, перенесення насіння на станцію 500 відбору проб за допомогою підсистеми 300 транспортування, де з насіння витягують матеріал проби в точці, звідки був видалений матеріал оболонки. Система 10 відбору проб крім того сконструйована і призначена для транспортування витягнутої проби в підсистему 800 депонування проб за допомогою підсистеми 700 транспортування проб, і депонування витягнутої проби в лоток 14 для проб, розташований на підсистемі 800 депонування проб. У різних варіантах даного винаходу матеріал проб збирають в одноразову трубку для проб і доставляють в лоток 14 для проб за допомогою рідини, як більш детально описано нижче. Крім того, система 10 відбору проб сконструйована і призначена для обробки, наприклад, нанесення захисного покриття на оголену ділянку насіння на станції 900 обробки насіння і транспортування насіння на підсистему 1000 депонування насіння, де насіння депонується в лоток 18 для насіння на платформі підсистеми 1000 депонування насіння. Потрібно розуміти, що система 10 відбору проб з насіння показана і описана в цьому документі, містить різні стаціонарні стояки, балки, платформи, підставки, основи і т.п., до яких кріпляться, з якими сполучаються або на яких монтуються різні описані компоненти, пристрої, механізми, системи, підсистеми, вузли і складальні вузли. Хоч такі стояки, балки, платформи, підставки, основи і т.п. необхідні в конструкції системи 10 відбору проб з насіння, опис їх розташування, орієнтації і взаємозв'язків не є необхідним для фахівця для того, щоб легко і повністю зрозуміти конструкцію, функції і роботу цієї системи 10. Зокрема, такі стояки, балки, платформи, підставки, основи і т.п. чітко показані на кресленнях і, тому їх розташування, орієнтація і з'єднання зрозумілі фахівцям. Отже, для спрощення, такі стояки, балки, платформи, підставки, основи і т.п. будуть згадуватися далі просто як опорні конструкції системи без додаткового опису їх розташування, орієнтації і з'єднань. Як показано на фіг. 2 і 3, в різних варіантах станція завантаження насіння містить жолоб 104 для насіння, і сепаруюче колесо 108. Сепаруюче колесо 108 встановлене з можливістю обертання у вертикальній площині так, що частина сепаруючого колеса 108 входить всередину жолоби 104 для насіння. Інша частина сепаруючого колеса 108 виходить назовні з жолоба 104 для насіння так, що грань 120 сепаруючого колеса 108 розташована поруч з приймачем 124 для насіння. Сепаруюче колесо 108 містить множину рознесених один від одного поглиблень 128, які виконані на грані 120 і сполучаються з вакуумною системою (не показана) так, що в кожному поглибленні 128 може створюватися розрідження. Для початку роботи системи 10 відбору проб з насіння, насіння, з якого треба відібрати і протестувати проби, вміщують у внутрішній резервуар жолоба 104 і щонайменше на частину поглиблень 128, наприклад, на поглиблення 128 на грані 120 тієї частини сепаруючого колеса 108, яка входить у внутрішній резервуар жолоба 104, подають вакуум. Сепаруюче колесо 108 потім приводять в переривисте обертання кроковим електродвигуном 132 так, що поглиблення 128 послідовно повертаються, проходячи через внутрішній резервуар жолоба 104, виходять з жолоба 104 і проходять повз збірник 124 насіння, перш ніж знову повернутися у внутрішній резервуар жолоба 104. По мірі того, як сепаруюче колесо переривисто обертається і поглиблення 128 переривисто проходять через внутрішній резервуар жолоби 104, окреме насіння захоплюється і втримується в кожному поглибленні 128 вакуумом, що створюється у відповідних поглибленнях 128. По мірі того, як сепаруюче колесо 108 переривисто обертається, насіння виноситься з жолоба 104 в приймач 124, де кожна насінина видаляється з грані 120 сепаруючого колеса 108. Після того, як кожна насінина буде вивантажена з сепаруючого колеса 108, насіння потрапляє через транспортну трубку 136 завантажувальної станції під впливом сили тяжіння, розрідження або стиснутого повітря, на прилад 204 для формування зображення насіння системи 200 орієнтування насіння. Транспортна трубка 136 станції завантаження має 3 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 такий розмір, що її внутрішній діаметр дозволяє насінню проходити через транспортну трубку 136 завантажувальної станції тільки в подовжній орієнтації. Тобто, насіння може проходити через транспортну трубку 136 завантажувальної станції тільки в орієнтації кінцем вгору або кінцем вниз і внутрішній діаметр не дозволить насінню перекидатися або перевертатися, коли воно проходить по транспортній трубці 136 станції завантаження. У різних варіантах даного винаходу збірник 124 насіння містить скребачку (не показаний), яка фізично витягує кожну насінину з відповідного поглиблення 128, коли сепаруюче колесо 108 переривисто обертається повз збірник 124 насіння. Потім, витягнуте насіння проходить по транспортній трубці 136 завантажувальної станції на прилад 204 для формування зображення. Альтернативно, в різних інших варіантах, кожна насінина може звільнятися з поглиблення 128 шляхом тимчасового припинення створення розрідження в кожному індивідуальному поглибленні 128, коли це індивідуальне поглиблення 128 підходить до збірника 124 насіння. Після цього, витягнуте насіння подається на прилад 204 для формування зображення через транспортну трубку 136 станції завантаження. У інших варіантах кожна насінина може видуватися з відповідного поглиблення 128, коли індивідуальне поглиблення 128 розташоване поруч з приймачем 124 насіння. Потім, витягнуте насіння транспортується на прилад 204 для формування зображення по транспортній трубці 136 станції завантаження. Додатково, в різних варіантах даного винаходу, станція 100 завантаження насіння може містити бункер 140 великої місткості для насіння, що має фігурну поверхню і механізм 144 вібраційної подачі. У бункер 140 великої місткості можна закладати велику кількість насіння, яке подається на механізм 144 вібраційної подачі. Механізмом 144 вібраційної подачі можна керувати для дозування насіння, що подається в жолоб 104, де насіння сепарується і переноситься на прилад 204 для формування зображень системи 200 орієнтування насіння, як описано вище. Як показано на фіг. 3 і 4, система 200 орієнтування насіння містить пристосування 204 для формування зображень насіння, пристрій 208 формування зображень і пристрій 212 для орієнтування насіння встановлений на платформі 214 з нерухомим центром системи 10 для відбору проб з насіння. Прилад для формування зображень насіння містить вікно 216 і внутрішню ділянку орієнтування насіння, видиму через вікно 216. Пристрій 212 орієнтування містить поворотний привід 220, виконаний з можливістю повертати насіння, коли насіння підвішене в ділянці орієнтування. Пристосування 204 для формування зображень з'єднане з кінцем транспортної трубки 136 станції завантаження, а пристрій 208 формування зображень встановлений на опорній структурі системи поруч з пристосуванням для формування зображень так, що насіння, підвішене в ділянці орієнтування насіння знаходиться в полі зору пристрою 208 формування зображень крізь вікно 216. Коли насіння буде перенесене на пристосування 204 для формування зображень по транспортній трубці 136 станції завантаження насіння підвішується в ділянці орієнтування поруч з вікном 216 і переглядається пристроєм 208 формування зображень крізь вікно 216. У різних інших варіантах насіння левітує в ділянці орієнтування з використанням повітря, що подається по транспортній трубці 224 системи орієнтування, з'єднаній з дном пристосування 204 для формування зображень навпроти транспортної трубки 136 станції завантаження. Або, в альтернативних варіантах насіння може фізично втримуватися в ділянці орієнтування за допомогою будь-якого прийнятного механічного втримуючого засобу. Коли насіння підвішене поруч з вікном 216, зображення насіння в пристосуванні для формування зображень фіксується пристроєм 208 формування зображень. Пристроєм 208 формування зображень може бути будь-який пристрій, здатний приймати крізь вікно 216 зображення насіння, підвішеного в ділянці орієнтування. Наприклад, в різних варіантах пристрій 208 формування зображень містить високошвидкісну цифрову камеру високого розрізнення, таку як камеру машинного зору, що використовує передові технології візуалізації (DVT). Зображення передається на контролер системи (не показаний), побудований на основі комп'ютера, де визначається орієнтація насіння, тобто вершиною вгору або вершиною вниз. У різних варіантах пристрій 208 формування зображення насіння додатково знаходить центроїд насіння і ідентифікує найбільш віддалену точку від центроїду як вершини насіння. Якщо буде визначено, що насіння орієнтоване вершиною вниз, насіння транспортується в цій орієнтації вершиною вниз через транспортну трубку 224 системи орієнтування в один з множини тримачів 304 насіння. Якщо буде визначено, що насіння орієнтоване вершиною вгору, контролер системи подає команду на перевертаючий привід 200 на поворот насіння на 180° для переведення насіння в орієнтацію вершиною вниз. Наприклад, перевертаючий привід 220 може бути пневматичним, який використовує повітря для обертання насіння, поки воно не перекинеться вершиною вниз і така орієнтація не буде визначена пристроєм 208 формування 4 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 зображення. Або перевертаючий привід може бути механічним приводом, який перевертає насіння, що втримується відповідним механічним втримуючим пристроєм для переміщення насіння в орієнтацію вершиною вниз. Прийнявши орієнтацію вершиною вниз, насіння транспортується в цій орієнтації вершиною вниз по транспортній трубці 224 системи орієнтування на один з тримачів 304 насіння. Орієнтування насіння вершиною вниз мінімізує ризик для життєздатності насіння, коли з насіння витягується проба, як буде описано нижче. У різних варіантах насіння транспортується по транспортній трубці 224 системи орієнтування під дією сили тяжіння, тобто, насіння падає з пристосування 204 для формування зображень через транспортну трубку 224 в один з тримачів 304 насіння. Додатково, під час транспортування до відповідного тримача 304 кожна насінина втримується в потрібній орієнтації, тобто, вершиною вниз, за рахунок того, що розмір внутрішнього діаметра транспортної трубки 224 не дозволяє насінню перекинутися вершиною вгору. У даному винаході контролером системи може бути система, побудована на одному комп'ютері або множині підсистем, з'єднаних в мережу для координації одночасно виконуваних операцій системи 10 відбору проб з насіння, що описується в цьому документі. Наприклад, контролер системи може містити множину контролерних підсистем, наприклад, контролерні підсистеми для кожної станції, описаної в цьому документі. Кожна контролерна підсистема може містити один або більше процесорів або мікропроцесорів, які підтримують зв'язок з різними датчиками, пристроями, механізмами, електродвигунами, інструментами і т.п. системи відбору проб з насіння, і які з'єднані в мережу з системою ведучого комп'ютера для координованого керування всіма станціями, системами і підсистемами системи 10 відбору проб з насіння. Тримачі 304 насіння встановлені з рівними інтервалами по периметру моторизованого поворотного стола 308 підсистеми 300 транспортування насіння. Транспортна трубка 224 системи орієнтування з'єднана першим кінцем з пристосуванням 204 для формування зображень насіння так, що другий кінець транспортної трубки 224 системи орієнтування насіння розташований на певній відстані над периферійною ділянкою поворотного стола 308. Більш конкретно, другий кінець транспортної трубки 224 системи орієнтування розташований над поворотним столом 308 на відстані достатній, щоб дозволити тримачам 304 насіння проходити під другим кінцем транспортної трубки системи орієнтування. Однак другий кінець транспортної трубки 224 системи орієнтування також розташований над поворотним столом 308 так, щоб між цимдругим кінцем і тримачами 304 залишався лише невеликий зазор. Тому кожна насінина зберігає свою орієнтацію вершиною вниз при переміщенні з транспортної трубки 224 системи орієнтування в один з тримачів 304 насіння. Як показано на фіг. 5, 6 і 7, кожний тримач 304 насіння сконструйований і призначений для жорсткого утримання відповідного насіння в орієнтації вершиною вниз. Кожний тримач 304 насіння містить пару розташованих одна проти одної затискних головок 312, встановлених з можливістю ковзання в розташованих один проти одного затискних гніздах 316. Розташовані один проти одного затискні гнізда 316 розділені каналом 318 для насіння, сформованим поперечно вздовж центральної лінії С тримача 304 насіння. Кожна затискна головка 312 з'єднана з відповідним затискним поршнем 320 через відповідний затискний шток 324. Кожний затискний поршень 320 встановлений з можливістю ковзання у відповідному подовжньому циліндрі 328 тримача 304 насіння. У кожному циліндрі 328 між основою відповідного поршня і дном відповідного циліндра 328 встановлена пружина 332 стиснення. Відповідно, кожна затискна головка 312 підтискається до центральної лінії С тримача 304 насіння. Коли тримач 304 насіння знаходиться в неробочому стані, тобто, коли відповідний тримач не втримує насіння або не приводиться в дію для утримування насіння, розташовані одна проти одної затискні головки 312 підтискаються пружинами 332 в повністю висунене або робоче положення. Коли затискні головки 312 знаходяться в робочому положенні, вершина кожного відповідного поршня 320 входить у відповідний канал 336 для вилки, яка проходить поперечно через тримач 304 насіння з протилежних сторін від каналу 318 для насіння. Кожна затискна головка 312 виконана з нетвердого пружного матеріалу, такого як "неопрен", так що насіння, що втримується між розташованими одна проти одної затискними головками 312, як описано нижче, не ушкоджується. Як описано вище, тримачі 304 насіння встановлені з однаковими інтервалами по периметру поворотного стола 308. Перед, після або по суті одночасно з процесом орієнтування, описаним вище, поворотний стіл 308 повертається для підведення пустого, тобто, в якому відсутнє насіння, тримача 304 насіння під транспортну трубку 224 системи орієнтування. Більш конкретно, під транспортною трубкою 224 системи орієнтації позиціонується канал 318 для насіння. Коли тримач 304 насіння встановлений під транспортною трубкою 224 системи орієнтування, приводиться в дію автоматичний пристрій 340 розведення затискних головок для 5 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 розведення затискних головок 12 так, щоб між ними могло бути прийняте насіння. Пристрій 340 розведення затискних головок встановлений на опорній структурі системи поруч з пристроєм 212 орієнтування, насіння і містить пару зубців 344 вилки, з'єднаних з основою 348 вилки. Пристрій 340 розведення затискних головок виконаний з можливістю висунення основи 348 вилки і зубців 344 до тримача 304 зміни. Наприклад, пристрій 340 розведення затискних головок може бути пневматичним пристроєм, виконаним з можливістю висувати і втягувати основу 348 вилки. Кожний зубець 344 вилки має скошену ділянку дистального кінця, розмір якого дозволяє йому входити в канали 336 для вилки. При активації пристрою 340 розведення затискних головок, основа 348 висувається до тримача 304 насіння так, що зубці 344 вставляються в канали 336 для вилки. Коли кожний зубець 344 ковзає у відповідний канал 336, скошені дистальні кінцеві ділянки входять між вершиною кожного відповідного поршня 320 і внутрішньою стінкою каналу 336 для вилки. По мірі подальшого просування зубців 344 в кожний канал 336, скіс кожного зубця відводить відповідний поршень 320 назовні від центральної лінії С тримача насіння. Відповідно, коли поршні відведені назовні від центральної лінії С, затискні головки 312 також відведені назовні одна від одної і від центральної лінії С. Таким чином затискні головки 312 зміщені у відсунене положення, в якому між ними можна вмістити насіння. Коли затискні головки 312 розведені, правильно орієнтоване насіння можна транспортувати по транспортній трубці 224 системи орієнтування і вміщувати його вершиною вниз між затискними головками 312. У різних варіантах система 10 відбору проб з насіння додатково містить підсистему 360 позиціонування насіння за висотою для встановлення насіння на певній висоті у відповідному тримачі 304 насіння. Підсистема позиціонування насіння за висотою містить вертикальний позиціонуючий пристрій 364, встановлений на опорній структурі системи під периметром поворотного стола 308, прямо навпроти транспортної трубки 224 системи орієнтування, а також привід 368 базової плити, встановлений на центральній платформі 214, прямо навпроти пристрою 340 розведення затискних головок. Пристрій 364 вертикального позиціонування містить підпружинений плунжер 372, встановлений на головці 376 позиціонуючого пристрою, а привід 368 базової плити містить базову плиту 380, встановлену на головці 384 приводу базової плити. Пристрій 364 вертикального позиціонування виконаний з можливістю висувати позиціонуючу головку 376 і плунжер 372 до дна поворотного стола 308 прямо навпроти центральної лінії С тримача насіння. Наприклад, пристрій 364 вертикального позиціонування може бути пневматичним пристроєм, виконаним з можливістю висувати і прибирати плунжер 372. Аналогічно, привід 368 базової плити виконаний з можливістю висувати привідну головку 384 і базову плиту 380 понад каналу 318 для насіння в тримачі насіння. Наприклад, привід 368 базової плити може бути пневматичним пристроєм, виконаним з можливістю висувати і прибирати базову плиту 380. Коли насіння вміщене між розведеними затискними головками 312, позиціонуюча головка 367 висувається вгору для введення плунжерного вала 388 через отвір (не показано) в дні поворотного стола 308 і співвісний отвір (не показано) в дні каналу 318 тримача насіння. По суті одночасно, привід 368 базової плити висуває привідну головку 384 для встановлення базової плити 380 на заданій відстані над тримачем 304 насіння, прямо над отвором в дні каналу 318 тримача насіння. Більш конкретно, коли позиціонуюча головка 376 рухається вгору, плунжерний вал 388 висувається в співвісні отвори і вступає в контакт з вершиною насіння. Насіння в цей час виштовхується вгору між затискним головками 312, поки тильна частина насіння не торкнеться базової плити 380. Підпружинена конструкція плунжера 372 дозволяє валу 388 відводитися всередині плунжера 372, коли тильна частина насіння торкається базової плити 380 так, що насіння втримується на місці без пошкоджень. Відповідно, тильна частина насіння розташовується на конкретній висоті відносно верхньої поверхні поворотного стола 308. Коли тильна частина насіння втримується в контакті з базовою плитою 380 підпружиненним плунжером 372, пристрій 340 розведення затискних головок приводиться в дію, і прибирає основу 348 вилки і витягує зубці 344 з відповідних каналів 336. При витяганні зубців 344, пружини 332 підтискають затискні головки 312 до робочого положення і міцно затискають насіння між затискними головками 312. Потім, базова плита 380 і плунжерний вал 388 відсуваються, залишаючи насіння правильно позиціонованим, або "завантаженим" у відповідному тримачі 304 насіння. Потім контролер системи повертає поворотний стіл 308 для підведення "завантаженого" тримача 304 насіння під станцію 400 очищення, а наступного, пустого тримача 304 насіння - під пристрій 212 орієнтування насіння. Як показано на фіг. 8, і як описано вище, система 10 відбору проб з насіння містить транспортну підсистему 300 для транспортування насіння між окремими станціями системи, тобто, станцією 100 завантаження, станцією 400 очищення, станцією 500 відбору проб тощо. По 6 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 суті підсистема 300 транспортування насіння може бути будь-яким відповідним транспортуючим механізмом, таким як стрічковий конвеєр, роликовий конвеєр і т.п. В різних варіантах даного винаходу, однак, транспортна підсистема 300 містить круглий поворотний стіл, в центрі якого виконаний шарнір для обертання. Поворотний стіл 308 умовно розділений на множину секторів і кожний сектор містить тримач 304 насіння. Кількість секторів на поворотному столі 308 може бути парною або непарною і вибрана кількість значною мірою залежить від діаметра поворотного стола 308, розміру тримачів 304 насіння і потреб в транспортуванні. Круглий поворотний стіл 308 шарнірно встановлений своїм центром на системі 390 вала і підшипників. У різних варіантах даного винаходу вал (не показаний) системи 390 може бути безпосередньо з'єднаний з привідним електродвигуном 392. Альтернативно, вал може бути виконаний окремо від привідного електродвигуна 392 і приводитися у обертання відповідною ланцюговою передачею, ремінною передачею або зубчатою передачею. У різних варіантах даного винаходу привідний електродвигун 392 може бути високомоментним кроковим електродвигуном. При роботі, привідний електродвигун 392 поворотного стола 308 приводиться в дію для покрокового повороту (за годинниковою стрілкою або проти годинникової стрілки, в залежності від конфігурації) поворотного стола 308 від станції до станції системи 10відбору проб. Тому, тримачі 304 насіння сполучаються з допоміжними пристроями, такими як завантажувальна станція 100, станція 400 очищення, станція 500 відбору проб і т.п. У такій конфігурації допоміжні пристрої можуть бути встановлені навколо поворотного стола 308 на станціях, які суміщені з кожним положенням і, отже, мати точний доступ до насіння і тримачів 304 насіння. В тій мірі, в якій це необхідно, периферійні кромки поворотного стола 308 можуть підтримуватися напрямними роликами, опорами ковзання і т.п., забезпечуючи плавне обертання транспортуючого поворотного стола. Як далі показано на фіг. 8 і як описано вище, коли кожний тримач 304 "завантажений" насінням, контролер системи повертає поворотний стіл 308 для позиціонування завантаженого тримача 304 насіння під станцією 400 очищення. Станція 400 очищення містить щонайменше один інструмент 404 для очищення, встановлений на опорній структурі системи над периметром поворотного стола 308. Один або більше інструмент 404 для очищення використовується для видалення частини оболонки з кожної насінини, коли відповідний тримач 304 насіння знаходиться під станцією 400 очищення. Кожний інструмент 404 для очищення містить привід 408 по осі Z, виконаний з можливістю опускати і підіймати щонайменше частину відповідного інструмента 404 для очищення по осі Z. Кожний інструмент 404 для очищення керується контролером системи і може приводитися в дію електричними, пневматичними або гідравлічними засобами. Інструмент (інструменти) 404 для очищення може бути будь-яким прийнятним механізмом для видалення частини матеріалу оболонки насіння з кожної насінини. Наприклад, в різних варіантах даного винаходу, кожний інструмент 404 для очищення є обертовим пристроєм, що включає в себе привід 408 осі Z і привід 412 обертання, оперативно з'єднаний з патроном 416 для різального інструмента. Кожний привід 408 осі Z виконаний з можливістю опускати і підіймати відповідний патрон 416 і різець 420 затиснутий в патроні 416, по осі Z. Різець 420 може бути будь-яким інструментом, придатним для видалення матеріалу оболонки насіння, таким як різець, свердло, фасонна, фреза, свердел або шабер. Наприклад, в різних варіантах даного винаходу різець 420 являє собою торцевий різець. Кожний привід 408 осі Z керується контролером системи для опускання відповідного приводу 408 осі Z на конкретну заздалегідь визначену відстань. Привід 412 обертання кожного обертового інструмента 404 для очищення виконаний з можливістю приведення у обертання відповідного затискного патрона 416 і будьякого різального інструмента 420, затиснутого в цьому патроні 416. При роботі, коли тримач 304 насіння розташований під обертовим інструментом 404 для очищення, вмикається привід 412 обертання для приведення у обертання патрона 416 і різця 420. Потім, на привід 408 осі Z подається команда на опускання відповідного патрона 416 і різця 420 на конкурентну попередньо визначену відстань. Коли обертовий різець 420 опускається, він контактує з тильною стороною насіння і видаляє оболонку насіння щонайменше з частини його тильної сторони. При цьому оголюється частина внутрішнього матеріалу насіння, який можна витягнути і використати для тестування і аналізу різних ознак відповідного насіння, як буде описано нижче. У різних варіантах даного винаходу станція 400 очищення містить щонайменше два інструменти 404 для очищення, встановлених на блоці 424 горизонтального переміщення станції очищення, який встановлений на опорній структурі системи. Блок 424 горизонтального переміщення станції очищення керується контролером системи для позиціонування вибраного 7 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 одного з інструментів 404 для очищення над тримачем 304 насіння, розташованим під станцією 400 очищення. Вибраний інструмент 404 для очищення}потім приводять в дію як описано вище, щоб видалити оболонку щонайменше з частини тильної сторони відповідного насіння. Потім, контролер системи, може позиціонувати другий з інструментів 404 для очищення над наступним тримачем 304 насіння, розташованим під станцією 400 очищення. Потім включають другий вибраний інструмент 404 для очищення, як описано вище, щоб видалити оболонку щонайменше з частини тильної сторони насіння. У таких варіантах станція 400 очищення додатково може містити щонайменше один вузол 428 очищення різця для очищення різця 416 холостого, тобто, не використовуваного інструмента 404 для очищення. Тобто, поки один інструмент 404 для очищення працює для видалення оболонки з відповідного насіння, різець 420 холостого другого інструмента 404 для очищення може очищатися вузлом 428 очищення в підготовці до наступної операції очищення. У різних варіантах даного винаходу вузли 428 очищення різця для видалення і/або збору залишків оболонки насіння, які могли скупчитися на різцях 420 інструментів 404 для очищення, . використовують стиснуте повітря або розрідження. Як показано на фіг. 9, коли з насіння видалена оболонка, контролер системи повертає поворотний стіл 308 для позиціонування відповідного тримача 304 насіння під станцією 500 відбору проб. Станція 500 відбору проб містить:ний на опорній структурі системи, прив'язаній до центральної платформи 214 над поворотним столом 308. Один або більше пробовідбірник 504 використовується для витягання частини, тобто, проби, оголеного внутрішнього матеріалу насіння, коли відповідний тримач 304 насіння розташований під станцією 500 відбору проб. Кожний пробовідбірник 504 містить привід 508 осі Z, виконаний з можливістю опускати і підіймати щонайменше частину відповідного пробовідбірника по осі Z. Кожний пробовідбірник 504 керується контролером системи і може приводитися в дію електричними, пневматичними або гідравлічними засобами. Пробовідбірник(і) 504 може бути будь-яким прийнятним механізмом для витягання проби оголеного внутрішнього матеріалу з кожної насінини. Наприклад, в різних варіантах даного винаходу, кожний пробовідбірник 504 є обертовим 512 обертання, оперативно з'єднаний із затискним патроном 516. Кожний привід 508 осі Z виконаний з можливістю опускати і підіймати відповідний патрон 516 і інструмент 520 для відбору проб, затиснутий в патроні 516, по осі Z. Інструментом 520 для відбору проб може бути будь-який інструмент, зовнішній діаметр якого менший, ніж окружність ділянки оголеного внутрішнього матеріалу насіння, і здатний витягувати пробу з оголеного внутрішнього матеріалу насіння, такий як свердло, фасонна фреза, свердел, або трубка для взяття проб. Важливо, щоб інструмент 520 для відбору проб мав менший діаметр, ніж різець 420, щоб отримувати матеріал проби з ділянки, з якої був видалений матеріал оболонки насіння, тим самим усуваючи можливість забруднення матеріалу проби матеріалом оболонки насіння. Наприклад, в різних варіантах даного винаходу інструмент 520 для відбору проб містить долотчасте свердло, що має зовнішній діаметр менший, ніж зовнішній діаметр різця 420. Кожний привід 508 осі Z керується контролером системи для опускання відповідного приводу осі на конкретну попередньо визначену відстань. Привід 512 обертання кожного обертового і пробовідбірника 504 приводить у обертання відповідний патрон 516 і будь-який інструмент 520 для відбору проб, затиснутий в патроні 516. При роботі, коли тримач 304 насіння розташований під обертовим пробовідбірником 504, привід 512 обертання включається для початку обертання патрона 516 і інструмента 520 для відбору проби. Привід 508 осі Z потім отримує команду на опускання відповідного патрона 516 і інструмента 520 для відбору проби на конкретну попередньо визначену відстань. Коли обертовий інструмент 520 для відбору проби опускається, він вступає в контакт з оголеним внутрішнім матеріалом насіння і вирізає проби внутрішнього, матеріалу. Потім пробу видаляють, або витягують, для тестування і аналізу на різні ознаки і/або характеристики відповідного насіння, як буде описано нижче. У різних варіантах даного винаходу станція 500 відбору проб містить щонайменше два пробовідбірники 504, встановлених на блоці 524 горизонтального переміщення, який встановлений на опорній структурі системи. Блок 524 горизонтального переміщення станції відбору проб керується контролером системи для позиціонування вибраного одного з пробовідбірників 504 над тримачем 304 насіння, розташованим під станцією 500 відбору проб. Вибраний пробовідбірник 504 потім застосовують як описано вище для витягання проби з оголеного внутрішнього матеріалу відповідного насіння. Потій, контролер системи може позиціонувати другий пробовідбірник 504 над наступним тримачем 304 насіння, розташованим під станцією 500 відбору проб. Потім другий пробовідбірник застосовують як описано вище для витягання проби з оголеного внутрішнього матеріалу відповідного насіння. У таких варіантах 8 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 станція 500 відбору проб може додатково містити щонайменше один вузол 528 очищення інструмента 520 для відбору проб на холостому, тобто не використовуваному пробовідбірнику 504. Тобто, коли один пробовідбірник 504 працює, витягуючи пробу з відповідного насіння, інструмент 520 холостого пробовідбірника 504 можна очищати на вузлі 528 очищення в підготовці до наступної операції відбору проби. У різних варіантах даного винаходу у вузлі 528 очищення інструмента для відбору проби для видалення і/або збору залишків внутрішнього матеріалу насіння, які могли скупчитися на інструментах 520 пробовідбірників 504, використовують стиснуте повітря або розрідження. Як показано на фіг. 9 і 10, підсистема 600 збору і транспортування проб керується контролером системи для роботи синхронно зі станцією 500 відбору проб для збору кожної проби, витягнутої з кожної насінини. Підсистема 600 збору і транспортування проб містить моторизовану обертову платформу 604, що приводиться в дію привідним електродвигуном (не показаний), аналогічно привідному електродвигуну 392 поворотного стола 308 (показаному на фіг. 8). Підсистем збору і транспортування проб додатково містить множину пристроїв 608 позиціонування збірних трубок, розташованих з однаковими інтервалами і прикріплених по периметру обертової платформи, 604. Кожний пристрій 608 позиціонування збірної трубки містить поворотний брусок 612, що має порожнистий тримач 616 трубки, що проходить в поперечному отворі (не показано) в поворотному бруску 612. Тримач 616 трубки містить дистальний кінець 618, виконаний з можливістю приймати основу 620 збірної трубки 624, і проксимальний кінець 628, виконаний з можливістю приймати трубку (не показана) пневматичної системи. Кожний пристрій 608 позиціонування збірної трубки містить привід 632 поворотного бруска, яким керує контролер системи для повороту бруска 612 в різні положення навколо подовжньої осі поворотного бруска 612. У різних варіантах даного винаходу привід 632 поворотного бруска виконаний з можливістю повертати тримач 616 трубки між положенням промивання, показаному на фіг. 11, положенням збору, показаним на фіг. 10, і положенням j завантаження і депонування, показаним на фіг. 13 і 17. Пристрій 608 позиціонування збірних трубок додатково містить стопорний важіль 636, з'єднаний з поворотним бруском 612 і регулювальний упор 640, наприклад, встановлювальний гвинт, взаємодіючий з упорним важелем 636 з можливістю регулювання. Стопорній важіль 636 і регульований упор 640 повертаються разом з поворотним бруском 612 і призначені для точної зупинки повороту бруска 612 так, щоб тримач 616 трубки знаходився в положенні збору. Одночасно з роботою станції 100 завантаження насіння, станцією 400 очищення і станцією 500 відбору проб, підсистема 600 збору і транспортування проб працює, завантажуючи збірну трубку 624 в тримач 616 кожного пристрою 608 позиціонування збірної трубки, збирає проби в збірні трубки 624, при витяганні кожної проби, і депонує зібрані проби в лотки 14 для проб. Операції завантаження збірних трубок 624 в тримачів 616 і депонування зібраних проб в лотки 14 будуть описані нижче з посиланнями на фіг. 17. і фіг. 12 і 13 відповідно. Збірною трубкою 624 може бути будь-який контейнер або пристрій, придатний для встановлення в тримач 616 і для збору проб, як описується нижче. Наприклад, в різних варіантах даного винаходу збірні трубки є одноразовими так, що кожна проба збирається в чисту збірну трубку 624. Прикладом такої одноразової збірної трубки 624 є фільтруюча піпетка. Як описано вище, підсистема 600 збору і транспортування проб керується контролером системи для синхронної координованої роботи зі станцією 500 відбору проб для збору кожної проби, витягнутої з кожної насінини. Більш конкретно, перед витяганням проби з насіння, контролер системи повертає платформу 604 для позиціонування пристрою 608 позиціонування збірної трубки поряд зі станцією 500 відбору проб так, що відповідний тримач 616 трубки суміщений з насінням, яке втримується в сусідньому тримачі 304 насіння, який підведений під пробовідбірник 504 шляхом керованого повороту поворотного стола 308. Перед позиціонуванням пристрій 608 позиціонування збірної трубки, що розташований поруч з тримачем 304 насіння, розташованим під станцією 500 відбору проб, система 600 збору і транспортування проб вже завантажила збірну трубку у відповідний дистальний кінець 618 і відповідний привід 632 поворотного бруска підняв збірну трубку 624 в положення над положенням збору, тобто, в положення промивання. Коли пристрій 608 позиціонування збірної трубки підведений до відповідного тримача 304 насіння, привід 632 поворотного бруска опускає завантажену збірну трубку 624 доти, поки регульований упор 640 не увійде в контакт з упорною пластиною 648, встановленою на опорній структурі системи між поворотним столом 308 і платформою 604 поряд зі станцією 500 відбору проб. Регульований упор 640 попередньо настроєний так, що обертання поворотного бруска 612 зупиняється для точного позиціонування 9 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 кінця 672 збірної трубки 624 дуже близько до тильної частини насіння або в контакті з тильною частиною насіння, яке втримується в сусідньому тримачі 304 насіння. Інструмент 620 пробовідбірника 504 потім опускають для початку витягання проби, як описано вище. Коли інструмент 620 для відбору проби опускають, на кінець 672 збірної трубки подають розрідження. Розрідження подають через вакуумну трубку (не показана), з'єднану з проксимальним кінцем 628 тримача 616 трубки. Вакуумна трубка також з'єднана з джерелом розрідження (не показаний) так, що вакуум створюється у вакуумній трубці, порожнистому тримачі 616 і в збірній трубці 624. Відповідно, коли інструмент 620 для відбору проб витягує матеріал проби, проба засмоктується в збірну трубку 624, де вона і зберігається. У різних варіантах даного винаходу станція 500 відбору проб містить пристрій (не показаний) для створення позитивного тиску, який допомагає розрідженню, яке створюється у відповідного насіння, зібрати по суті весь витягнутий матеріал проби у відповідну збірну трубку 624. Кожна збірна трубка містить фільтр 676, що запобігає засмоктуванню проби в тримач 616 трубки і у вакуумну трубку. Коли проба зібрана, привід 632 поворотного бруска підіймає збірну трубку 624 в положення промивання і відповідний пристрій 608 позиціонування збірної трубки подається в положення, що розташоване поруч з підсистемою 700 доставки рідини. Потім, інший пристрій 608 позиціонування збірної трубки і пуста збірна трубка 624 підводяться до наступного тримача 304 насіння і насіння, з якого ще не була взята проба, яке було підведене до станції відбору проб. Як показано на фіг. 11 і 12, підсистема 700 доставки рідини містить пристрій 704 для ін'єкції рідини, встановлений на лінійному приводі 708, виконаному з можливістю висувати і прибирати пристрій 704 для ін'єкції рідини вздовж лінійної осі М. Більш конкретно, лінійний привід 708 виконаний з можливістю вставляти ін'єкційну голку 712, прикріплену до пристрою 704 для ін'єкції рідини в кінець 762 відповідної збірної трубки 624, і витягувати її і з цього кінця. Коли збірна трубка 624 з відібраною пробою піднята в положення промивання і підведена до підсистеми 700 доставки рідини, лінійний привід 708 ін'єкційна голка 712 знаходяться у відведеному положенні, як показано на фіг. 11. Привід 632 поворотного бруска і поворотна платформа 604 керуються контролером системи так, щоб коли пристрій 608 позиціонування збірної трубки підведений до підсистеми 700 доставки рідини і збірна трубка піднята в положення промивання, лінійна вісь збірної трубки по суті співпадала з лінійною віссю М пристрою 704 для ін'єкції рідини, як показано на фіг. 11. Коли лінійна вісь збірної трубки 624 розташована співвісно з віссю М, лінійний привід 708 висувається, щоб вставити ін'єкційну голку 712 в кінець 672 збірної трубки 624. Пристрій 704 для ін'єкції рідини з'єднаний з джерелом екстрагуючої рідини (не показана) через рідинний порт 716, з'єднаний з дозуючим клапаном 720 пристрою 704 для ін'єкції рідини. Тому, коли ін'єкційна голка 712 введена в кінець 672 збірної трубки, пристрій 704 впорскує відміряну кількість екстрагуючої рідини в збірну трубку 624. Екстрагуюча рідина, яку вприснули, промиває або змиває внутрішні стінки збірної трубки 624 і створює водний розчин відповідної проби, що далі називаються водною пробою. Таким чином, будь-яка частина відібраної проби, яка могла залишитися на внутрішніх стінках збірної трубки 624 змивається зі стінок так, що по суті вся відібрана проба переходить в суспензію результуючої водної проби. Екстрагуючою рідиною може бути будь-яка рідина, прийнятна для доставки по суті всього матеріалу проби, зібраної у відповідній збірній трубці 624, не впливаючи на бажаний аналіз, напр., хімічний і генетичний аналіз матеріалу проби. Наприклад, в різних варіантах даного винаходу екстрагуючою рідиною може бути дистильована вода або будь-який прийнятний розчинник, сумісний з необхідним аналізом проби. Після того, як зібрана проба буде змішана з екстрагуючою рідиною, лінійний привід 708 відходить, щоб витягнути ін'єкційну голку 712 з кінця 672 збірної трубки. Контролер системи потім подає обертову платформу для позиціонування пристрою 608 позиціонування збірної трубки над підсистемою 800 депонування проб. Контролер системи додатково видає команду на привід 632 для переведення збірної трубки в положення завантаження і депонування. У положенні завантаження і депонування тримач 616 трубки і встановлена в ньому трубка 624 направлені вниз, по суті у вертикальній орієнтації. Як показано на фіг. 13, підсистема 800 депонування проб містить платформу 804 для лотків з пробами, виконану з можливістю міцно втримувати множину лотків 14 з пробами в фіксованому положенні і з фіксованою орієнтацією. Кожний лоток 14 для проб містить множину гнізд 22, кожне з яких виконане з можливістю приймати зібрану водну пробу. Платформа 804 лотків для проб встановлена на координатному столі 808. Координатний стіл 808 є механізмом двовимірного переміщення по осях X і У, який містить першу напрямну 812 і другу напрямну 816. Координатний стіл 808 додатково містить перший лінійний привід 818, виконаний з 10 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 можливістю двоспрямовано переміщувати першу каретку (не показана) по першої напрямної 812. Координатний стіл 808 далі містить другий лінійний привід 820, виконаний з можливістю двоспрямовано переміщувати другу каретку (не показана) вздовж другої напрямної 816. Друга напрямна 816 встановлена на першій каретці, а на другій каретці встановлений координатний стіл 804. Перший і другий приводи 818 і 820 керуються контролером системи для прецизійного переміщення платформи з лотками для проб в двох напрямках. Більш конкретно, перший і другий приводи 818 і 820 переміщують платформу з лотками для проб в системі координат X і У для прецизійного позиціонування будь-якого вибраного гнізда 22 будь-якого вибраного лотка 14 для проб в заданому положенні під пристроєм 608 позиціонування, в якому закріплена збірна трубка 624, що містить зібрану водну пробу. Задане положення це положення в системі координат X і У, яке розташоване прямо під кінцем 672 збірної трубки, коли збірна трубка 624 знаходиться в положенні завантаження і депонування над платформою 804 для лотків. Таким чином, коли пристрій 608 позиціонування збірної трубки знаходиться над платформою 804 для лотків, і відповідна збірна трубка 624 переведена в положенні завантаження і депонування, при якому кінець 672 трубки направлений в задане положення, контролер системи позиціонує вибране гніздо 22 вибраного лотка 14 в задане положення. Після цього водну пробу депонують у вибране гніздо 22, подаючи позитивний тиск на проксимальний кінець 628 тримача 616 трубки. Коли лотки 14 для проб встановлені на платформі 804 для лотків, ідентифікаційний номер кожного лотка 14, наприклад, в формі штрих-коду, і положення кожного лотка 14 на платформі 804, реєструються. Додатково, коли кожна проба депонується в гніздо 22, можна реєструвати координати гнізда, тобто, задане положення на платформі 804 для лотків. Зареєстровані координати лотка і гнізда на платформі 804 для лотків можна порівнювати з координатами кожної депонованої водної проби для ідентифікації конкретної водної проби в кожному гнізді 22 кожного лотка 14. Після того, як кожна водна проба буде депонована у вибране гніздо 22, контролер системи подає обертову платформу 604 для позиціонування наступного пристрою 608 позиціонування, що втримує збірну трубку 624, яка містить наступну водну пробу, над підсистемою 800 депонування проб. Додатково, пристрій 608 депонування, що втримує використану, пусту збірну трубку 624 подається на станцію 850 (фіг. 1) збору використаних трубок, на якій використана збірна трубка 624 може бути витягнута або викинена з відповідного тримача 616. Стиснуто повертаючись до фіг. 1, в різних варіантах даного винаходу, станція 850 збору використаних трубок містить пристрій 854 витягання використаних трубок, встановлений на лінійному приводі 858, виконаному з можливістю висувати і прибирати автоматизоване захоплення 862. Коли пристрій 608 позиціонування, що втримує збірну трубку 624 підводиться до пристрою, 854 витягання збірної трубки, контролер системи видає команду на лінійний привід 858 на висунення і захоплення використаної збірної трубки 624 захопленням 862. Контролер системи потім видає команду на прибирання лінійного приводу 858 і, тим самим, на витягання використаної збірної трубки 624 з тримача 616. Потім на захоплення 862 може бути подана команда на відпущення використаної збірної трубки 624, дозволяючи їй впасти в контейнер (не показаний) для використаних трубок. Повертаючись до фіг. 14, в різних варіантах даного винаходу після того, як із насіння була витягнута проба на станції 500 відбору проб, контролер системи може подати поворотний стіл 308 для підведення відповідного тримача 304 насіння до станції 900 обробки насіння. Станція 900 обробки насіння містить обробляючий дозатор 904, розташований на опорній структурі системи над периметром поворотного стола 308. Обробляючий дозатор 904 містить аплікатор 908, виконаний з можливістю нанесення обробного складу, наприклад, герметика, на оголену частину відповідного насіння, тобто, на ділянку тильної сторони насіння, з якої була видалена оболонка і з якої була витягнута проба. Обробним складом може бути будь-яка речовина, призначена для поліпшення однієї або більше властивостей насіння або для захисту насіння від бактерій або інших шкідливих елементів, які можуть пошкодити насіння і знищити його здатність до проростання. Наприклад, в різних варіантах даного винаходу, обробний склад є герметиком, що містить фунгіцид і/або полімер, що подається на насіння обробляючим дозатором 904 через аплікатор 908. Аплікатор 908 може бути будь-яким пристроєм, виконаним з можливістю наносити обробний склад на насіння, наприклад, щіткою, голкою або соплом. У різних варіантах даного винаходу аплікатор 908 містить розпилювальне сопло, а обробляючий дозатор 904 містить порт 912, з'єднаний з дозуючим клапаном 916. У таких варіантах обробляючий дозатор 904 з'єднаний з джерелом обробного складу (не показаний) через порт 912. Відповідно, коли тримач 304 насіння приходить на станцію 900 обробки насіння, під обробляючий дозатор 904, 11 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 контролер системи видає команду на обробляючий дозатор 904 на розпилення відміряної кількості обробного складу на відповідне насіння. Як показано на фіг. 15 і 16, після відбору проби і факультативної обробки насіння, контролер системи подає поворотний стіл 108 поки відповідний тримач 304 насіння не підійде до другого розширювача 1004 затискних головок підсистеми 1000 депонування насіння. Розширювач 1004 затискних головок встановлений на опорній структурі системи і містить пару зубців 1008 з'єднаних з основою 1012 вилки. Розширювач 1004 затискних головок по суті ідентичний за формою і функціями розширювачу 340 затискних головок, описаному вище з посиланнями на фіг. 5. Відповідно, при активації розширювача 1004 затискних головок, основи 1012 вилки висувається до тримача 304 так, що зубці 1008 входять в канали 336 для зубців. Коли зубці 1008 ковзають у відповідних каналах 336, затискні головки 312 відповідного тримача 304 розходяться, як описано вище. Коли затискні головки 312 розходяться, відповідне насіння отримує можливість впасти крізь співвісні отвори в дні каналу 318 тримача насіння і в столі 308, у лійку 1016 транспортера 1020 насіння. Транспортер 1020 насіння містить першу секцію 1024 труби, з'єднану першим кінцем з лійкою 1016, а другим кінцем - з входом першого пристрою 1028 Вентурі. Друга секція 1032 труби першим кінцем з'єднана з виходом пристрою 1028 Вентурі, а другим кінцем - з входом другого пристрою 1036 Вентурі. Вихід другого пристрою 1036 Вентурі з'єднаний з викидачем 1040 насіння, встановленим на опорній структурі системи над платформою.1044 лотків для насіння. Перший пристрій 1028 Вентурі виконаний з можливістю створення потоку повітря в першій і другій секції 1024 і 1032 труби, направлений до викидача 1040 насіння. У той же час, другий пристрій 1036 Вентурі виконаний з можливістю створення потоку повітря, направленого до лійки 1016. Таким чином, потік повітря, що створюється першим пристроєм 1028 Вентурі, засмоктує насіння в першу лійку 1016 і в першу секцію 1024 труби. Додатково, коли насіння входить в першу секцію 1024 труби, воно подається до викидача 1040 насіння потоком повітря, що створюється першим пристроєм 1028 Вентурі. Потім, коли насіння наближається до викидача 1040 насіння, його швидкість сповільнюється потоком повітря, що створюється другим пристроєм 1036 Вентурі так, що насіння м'яко викидається з пристрою 1040 в лоток 18 і не ушкоджується. У різних варіантах даного винаходу потік повітря, що створюється другим пристроєм 1036 Вентурі, фактично зупиняє рух насіння, дозволяючи йому впасти в лоток 8 під дією сили тяжіння. У першу і другу секції 1024 і 1032 труби можуть бути вбудовані різні датчики положення (не показані) для визначення присутності насіння і створення зворотного зв'язку з контролером системи для керування роботою транспортера 1020 насіння. Як показано, зокрема на фіг. 16, підсистема 1000 депонування насіння додатково містить платформу 1044 лотків для насіння, виконану з можливістю міцно втримувати множину лотків 18 для насіння, в фіксованому положенні і орієнтації. Кожний лоток 18 для насіння містить множину гнізд 26, кожне з яких виконане з можливістю приймати насіння, що викидається з викидача 1040 насіння. Викидач 1040 насіння встановлений на опорній структурі системи над платформою 1044 лотків для насіння так, що насіння можна викидати з викидача 1040 у вибрані гнізда 26 вибраних лотків 18. Платформа 1044 лотків для насіння встановлена на координатному столі 1048. Координатний стіл 1048 є механізмом двовимірного переміщення по осях X і У, який містить першу напрямну 1052 і другу напрямну 1056. Координатний стіл 1048 додатково містить перший лінійний привід 1060, виконаний з можливістю двоспрямовано переміщувати першу каретку (не показана) по першій напрямній 1052. Координатний стіл 1048 далі містить другий лінійний привід 1064, виконаний з можливістю двоспрямовано переміщувати другу каретку (не показана) вздовж: другої напрямної 1056. Друга напрямна 1056 встановлена на першій каретці, а на другій каретці встановлений координатний стіл 1044. Перший і другий приводи 1060 і 1064 керуються контролером системи для прецизійного переміщення платформи з лотками для насіння в двох напрямках. Більш конкретно, перший і другий приводи 1060 і 1064 переміщують платформу з лотками для проб в системі координат X і У для прецизійного позиціонування будь-якого вибраного гнізда 26 будь-якого вибраного|лотка 18 для проб в заданому положенні під викидачем 1040 насіння. Задане положення це положення в системі координат X і У, яке розташоване прямо під кінцем 1068 викидача 1040 насіння. Коли тримач 304 насіння розташований над лійкою 1016, контролер системи позиціонує вибране гніздо 26 вибраного лотка в заданому положенні. Насіння з тримача 304 звільняється, падає у лійку 1016 і транспортується у викидач 1040, як описане вище, і м'яко депонується у вибране гніздо. Коли лотки 18 для насіння встановлюються на платформу 1044, ідентифікаційний номер кожного лотка 18, наприклад, в формі штрих-коду, і положення кожного лотка на платформі 12 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 1044 реєструються. Додатково, коли кожну насінину депонується в гніздо 26, координати гнізда, тобто, задане положення, на платформі 1044, можна зареєструвати. Зареєстровані координати положень лотка і гнізда на платформі 1044 можна потім порівнювати з координатами кожного депонованого насіння для ідентифікації конкретного насіння в кожному гнізді 26 кожного лотка 18. Як описано вище, кожний з лотків 18 для насіння і лотків 14 для проб має множину гнізд 26 і 22, відповідно. У різних варіантах даного винаходу кількість і розташування гнізд 26 в лотках 18 для насіння відповідає кількості і розташуванню гнізд 22 в лотках 14 для проб. Це полегшує отримання повної відповідності між насінням і відібраною пробою. Однак в деяких варіантах може виявитися бажаним створити множину гнізд 22 в лотку 14 для проб для кожного гнізда 26 в лотку 18 для насіння, наприклад, коли на пробах треба проводити множину аналізів, або коли з одного насіння відбирається множина проб (наприклад, проби з різної глибини). Як показано на фіг. 17, в різних варіантах даного винаходу система 10 відбору проб з насіння додатково містить станцію 110 завантаження збірних трубок для встановлення збірних трубок 624 у тримачі 616 трубок кожного пристрою 608 позиціонування збірної трубки. Станція 1100 завантаження збірних трубок містить бункер 1104, що має фасонну поверхню, і подавальний вібраційний лоток 1108, що відходить від відкритого дна бункера 1104. У бункер 1104 можна завантажити велику кількість збірних трубок 624, а вібраційний лоток 1108 подає збірні трубки 624 у вібраційний чашковий живильник 1112. З виходом 1118 вібраційний чашкового живильника 1112 своїм першим кінцем 1116А з'єднаний гравітаційний лоток 1116. Другий кінець гравітаційного лотка 1116 закінчується у штовхача 1120 збірних трубок. Штовхач 1120 проходить ортогонально вниз від другого кінця 1116В лотка, який подає і містить подовжній підіймальний канал 1124, який проходить вздовж довжини штовхача 1120. Штовхач 1120 додатково містить штовхаючий механізм (не показаний), розташований всередині штовхача 1120. Штовхаючий механізм може бути будь-яким механізмом, виконаним з можливістю виштовхувати збірну трубку 624, подовжньо встановлену в підіймальному каналі 1124, з верхнього кінця 1120А штовхача 1120. Наприклад, штовхаючий механізм може містити лінійний привід, який приводить в дію штовхач, що має форму, що дозволяє прийняти щонайменше частину збірної трубки 624. Коли вібраційний чашковий живильник 1112 вібрує, збірні трубки 624 мігрують до вихідного отвору 1118 вібраційного чашкового живильника 1112. З вихідного отвору 1118 збірні трубки 624 падають на першій кінець 1116А подавального гравітаційного лотка, який має таку форму, яка примушує збірні трубки 624 падати в проріз (не показаний), що проходить вздовж довжини лотка 1116. Більш конкретно, збірні трубки 624 падають в проріз вершиною вниз і підвішуються в цьому прорізі на фланці 620А, виконаному на основі 620 трубки (як показано на фіг. 10). Сила тягаря і вібрації від вібраційного чашкового живильника 1112 примушують збірні трубки переміщатися по лотку 1116 і нагромаджуватися в одну шеренгу на другому кінці 1116В лотка. Коли збірні трубки 624 нагромаджуються в одну шеренгу на другому кінці 1116В, передня збірна трубка 624 буде орієнтована вертикально в подовжньому підіймальному каналі. Потім приводиться в дію штовхач 1120 так, що штовхаючий механізм виштовхує передню збірну трубку 624 з верхнього кінця 1124А підіймального каналу 1124 штовхача. Перед тим, як привести в дію штовхач 1120, контролер системи подає поворотну платформу 604 для підведення пристрою 608 позиціонування збірної трубки в положення над другим кінцем 1116В подавального лотка 1116. Контролер системи потім видає команду на привід 632 поворотного бруска для встановлення тримача 616 трубки в положення завантаження і депонування так, щоб дистальний кінець 618 тримача знаходився прямо над верхнім кінцем 1124А підіймального каналу. Тому, коли передня збірна трубка виштовхується, або підіймається, з верхнього кінця 1124А підіймального каналу, основа 620 збірної трубки надівається на дистальний кінець 618 тримача трубки. Дистальний кінець 618 тримача трубки має такий розмір, що між основою 620 збірної трубки і дистальним кінцем 618 тримача виникає фрикційна посадка. Відповідно, збірна трубка 624 і підіймається з штовхача 1120 і кріпиться на відповідному тримачі. Наступна збірна трубка 624 в подавальному лотку 1116 потім входить в підіймальний канал 1124 і наступний дистальний кінець 618 тримача трубки позиціонується для прийому збірної трубки 624. Як показано на фіг. 18, в різних варіантах даного винаходу збірні трубки 624 можуть містити комерційно доступні піпетки, позначені на кресленні позицією 624'. У таких варіантах піпетки 624' можуть вимагати видалення частини кінчика 672', щоб забезпечити правильність витягання проби, промивання піпетки і депонування водної проби в лотки 14 для проб. Отже, в таких варіантах система 10 відбору проб з насіння може містити підсистему 1150 підготовки збірних трубок, виконану з можливістю зрізати частину кінця 672' кожної піпетки, після того як піпетка 13 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 624' буде встановлена на відповідний тримач 616. Підсистема 1150 підготовки збірних трубок містить лінійний привід 154, виконаний з можливістю висувати і прибирати основу 1158А різального пристосування 1158 вздовж лінійної осі Р. Лінійний привід 1154 встановлений на опорній структурі системи під поворотною платформою 604 так, що коли знову встановлена піпетка 624', тобто, піпетка 624', щойно встановлена на відповідний тримач 616, подається до підсистеми 1150 підготовки збірних трубок, кінець 672' піпетки розташовується в камері 1162 зрізання. Камера 1162 зрізання сформована між основою 1158А різального пристосування і поглибленням 1166, сформованою в головці 1158В різального пристосування 1158. Як показано на фіг. 18, коли знову встановлена піпетка 624' подається від станції 1100 завантаження збірних трубок, основа 1158А різального пристосування знаходиться у відведеному положенні і кінець 672' розташований в поглибленні 1166. Потім контролер системи видає команду на лінійний привід 1154 висуває основу 1158А різального пристосування. Різальне пристосування 1158 містить різальний інструмент 1170, наприклад, лезо, жорстко закріплене або яке втримується на основі 1158А тримачем 1174 різального інструмента. Різальний інструмент нерухомо розташований так, що коли лінійний привід 1154 висуває основу 1158А пристосування, різальний інструмент зрізає кінчик 672' піпетки, тим самим видаляючи частину кінчика 672'. Як показано на фіг. 19, в різних варіантах даного винаходу, після того, як насіння, з якого була відібрана проба, депоноване у вибране гніздо 26 вибраного лотка 18 для насіння, контролер системи подає поворотний стіл 308 і позиціонує Р пустий тримача 304 насіння, на станції 1200 очищення. Станція 1200 очищення виконана з можливістю очищення і видалення будь-яких залишків проби насіння і/або обробного складу, наприклад, герметика, з відповідного тримача 304 насіння після того, як насіння було переміщене в лоток 18 і до того, як нове насіння буде орієнтоване і вміщене в тримач 304 насіння. Станція очищення містить обертову щітку 1204 і пристрій 1208 для створення вакууму. Пристрій 1208 для створення вакууму з'єднаний з джерелом вакууму (не показаний) для створення розрідження на всмоктуючому патрубку 1212, встановленому в безпосередній близькості до каналу 318 тримача насіння, коли відповідний тримач 304 переміщений на станцію 120 очищення. Вакуум, що подається видаляє будь-які залишки матеріалу проби і/або обробного складу, які могли скупчитися на тримачі 304 насіння. Додатково, обертова щітка 1204, встановлена на валу 1216 приводитеся у обертання електричним або пневматичним приводом для обертання на цьому валу або разом з ним. Одночасно з створенням розрідження на патрубку 1212 контролер системи приводить у обертання щітку 1204 для видалення будь-якого залишкового матеріалу проби і/або обробного складу, які могли скупчітися на тримачі 304 насіння. Варіанти застосування Згідно з даним винаходом пропонуються способи аналізу насіння, яке має бажані ознаки, маркер або генотип. Згідно з одним аспектом даного винаходу ці аналітичні способи дозволяють проаналізувати окреме насіння, присутнє в партії або масовій популяції насіння, так, що можна визначити хімічні і/або генетичні характеристики окремого насіння. Проби, отримані за даним винаходом можна використати для визначення широкого спектра фізичних, морфологічних, хімічних і/або генетичних ознак. По суті такі ознаки визначають шляхом відбору проб по одній або більше хімічній або генетичній характеристиці, яка вказує на ці ознаки. Необмежуючими прикладами хімічних характеристик є протеїни, масла, крохмаль, жирні кислоти і метаболіти. Відповідно, необмежуючими прикладами хімічних ознак є вміст протеїну, вміст крохмалю, вміст масла, визначення профілів жирних кислот, визначення профілів метаболітів і т.п. Генетичні характеристики можуть включати, наприклад, генетичні маркери, алелі генетичних маркерів, ланцюжки ДНК, ланцюжки РНК, промотори, локуси кількісних ознак (QTL), 5'-нетрансльована ділянка, 3'-нетрансльована ділянка, маркери сателітів, трансгени, мРНК, ds мРНК, транскрипційні профілі і варіанти метилування. У деяких варіантах способи і пристрої за даним винаходом можуть використовуватися в програмах селекції для відбору рослин або насіння, що мають необхідні ознаки або маркерні генотипи. Способи за даним винаходом можна використати в комбінації з будь-якою методикою селекції; а також можна використати для відбору одного покоління або відбору множини поколінь. Вибір способу селекції залежить від способу розмноження рослин, спадковості поліпшуючої ознаки (ознак), і типу культурного сорту рослини, яка використовується в комерційних цілях (наприклад, культурний сорт F1, культурний сорт чистої лінії і т.п.). Деякі необмежуючі підходи до селекції рослин за даним винаходом показані нижче. Далі розуміється, що в програмі селекції можна використати будь-які комерційні і некомерційні культурні сорти. Вибір звичайно диктують такі чинники як схожість, сила вегетації, стійкість до стресів, стійкість 14 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 60 до захворювань, гілкування, цвітіння, набір насіння, розмір насіння, щільність насіння, стійкість до вилягання, обмолочуваність і т.п. У різних варіантах способи і пристрої за її даним винаходом використовуються для визначення генетичних характеристик насіння в програмі селекції з використанням маркерів. Такі способи дозволяють удосконалити програми селекції з використанням маркерів, при яких можна проводити неруйнуючий відбір проб з насіння, зберігаючи ідентичність окремого насіння від системи відбору проб до поля. У результаті, програма селекції із застосуванням маркерів перетворюється у "високопродуктивну" платформу, де можна більш ефективно і за більш короткий час накопичувати популяцію (насіння, що має необхідну ознаку, маркер або генотип, прикладаючи при цьому менше матеріальних і трудових витрат. Ці переваги будуть більш детальну описані нижче. У інших варіантах згідно з даним винаходом пропонується спосіб аналізу окремого насіння в популяції насіння, яке має генетичні відмінності. Цей спосіб містить кроки, при яких витягують пробу, яка містить клітини з ДНК з насіння популяції, не впливаючи на схожість насіння; сортують ДНК, витягнуту з проби за наявності або відсутності щонайменше одного генетичного маркера; сортують насіння популяції на основі результатів сортування по ДНК; і культивують рослини з відібраного насіння. Як було описано вище, системи і способи відбору проб за даним винаходом захищають схожість насіння і є неруйнуючими. Схожість означає, що велика частина насіння, з якого були відібрані проби (тобто, більше 50 % всього насіння, з якого були відібрані проби) залишається життєздатним після відбору проб. У деяких конкретних варіантах щонайменше прибл. 75 % насіння, в деяких варіантах щонайменше 85 % насіння, з якого були відібрані проби, зберігають життєздатність. Потрібно зазначити, що за деяких обставинах або для і деяких варіантах застосування можуть допускатися і більш низькі показники схожості, наприклад, при зменшенні з часом витрат на генотипування, оскільки можна відібрати проби з більшої кількості насіння при тих же витратах на генотипування. У інших варіантах здатність до проростання підтримується протягом щонайменше шести місяців після відбору проби, щоб пересвідчитися, що насіння, з якого відібрана проба, збереже життєздатність до висіву в полі. У деяких конкретних варіантах спосіб за даним винаходом далі містить крок, при якому обробляють насіння, з якого була відібрана проба для збереження здатності до проростання. Така обробка може по суті включати будь-які засоби, відомі в галузі і призначені для захисту насіння від умов навколишнього середовища при зберіганні або транспортуванні. Наприклад, в деяких варіантах насіння, з якого були відібрані проби, можуть бути оброблені полімером і/або фунгіцидом для захисту такого насіння при зберіганні або транспортуванні до поля перед висівом. У різних варіантах проби за даним винаходом використовуються у високопродуктивному неруйнуючому способі аналізу індивідуального насіння в популяції насіння. Спосіб містить кроки, при яких витягують пробу з насіння, зберігаючи його здатність до проростання, і сортують проби за наявності або відсутності однієї або більше характеристики, яка вказує на генетичну або хімічну ознаку. Спосіб може далі містити крок, при якому відбирають насіння з популяції на основі результатів такого сортування і культивують рослини з відібраного насіння. ДНК можна витягувати з проби за допомогою будь-якого способу витягання ДНК, відомого фахівцям, який дає достатній вихід ДНК, якість ДНК і характеристику ПЛР. Необмежуючим прикладом відповідних способів витягання ДНК є екстрагування на основі додецилсульфату натрію (SDS) з центрифугуванням. Крім того, екстраговану ДНК можна копіювати після екстракції, використовуючи будь-які відомі фахівцям способи ампліфікації. Наприклад, одним відомим способом ампліфікації є GenomiPhi® від Amersham Biosciences. Екстраговану ДНК сортують за наявності або відсутності відповідного генетичного маркера. Є велика кількість генетичних маркерів, відомих фахівцям. Сортування ДНК за наявності або відсутності генетичного маркера може бути використане для відбору насіння в популяції для селекції. Сортування може використовуватися для відбору по локусах кількісних ознак (QTL), алелях, або по комбінаціях алелей даного локусу (гаплотипах). Алелі, які відбираються, локуси кількісних ознак і гаплотипи можна ідентифікувати, використовуючи нові технології молекулярної біології і модифікації класичних стратегій селекції. У інших різних варіантах насіння відбирають на основі наявності або відсутності генетичного маркера, який генетично пов'язаний з локусом кількісних ознак. Приклади локусів кількісних ознак, які часто є предметом інтересу, включають в себе, крім іншого, продуктивність, стійкість до вилягання, висоту, стиглість, стійкість до захворювань, стійкість до шкідників, стійкість до нестачі поживних речовин, склад зерна, переносимість гербіцидів, вміст жирних кислот, білковий або вуглеводний метаболізм, підвищений вміст масла, підвищений вміст поживних 15 UA 97797 C2 5 10 15 20 25 30 35 40 45 50 55 речовин, стійкість до стресів, органолептичні властивості, морфологічні характеристики, т.п. агрономічні ознаки, ознаки промислового застосування, ознаки привабливості для споживачів, і комбінації ознак як індекс множинних ознак. Альтернативно, насіння можна вибирати за наявності або відсутності маркера, генетично пов'язаного з гаплотипом, пов'язаним з локусом кількісних ознак. Прикладами таких локусів кількісних ознак знову є, крім іншого, продуктивність, стійкість до вилягання, висота, стиглість, стійкість до захворювань, стійкість до шкідників, стійкість до нестачі поживних речовин, склад зерна, переносимість гербіцидів, вміст жирних кислот, білковий або вуглеводний метаболізм, підвищений вміст масла, підвищений вміст поживних речовин, стійкість до стресів, органолептичні властивості, мор
ДивитисяДодаткова інформація
Назва патенту англійськоюAutomated seed sampler system and method for extracting sample of seed material
Автори англійськоюDeppermann Kevin, Listello Jennifer, Rahn Phillip, Koestel Angela
Назва патенту російськоюАвтоматизированная система для отбора проб из семян и способ извлечения пробы материала из семян
Автори російськоюДепперманн Кевин, Листелло Дженнифер, Ран Филлип, Кестель Анджела
МПК / Мітки
МПК: G01N 1/02, A01C 1/00, A01H 1/04
Мітки: спосіб, автоматизована, проб, витягання, насіння, відбору, проби, тканини, система
Код посилання
<a href="https://ua.patents.su/31-97797-avtomatizovana-sistema-dlya-vidboru-prob-z-nasinnya-i-sposib-vityagannya-probi-tkanini-z-nasinnya.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система для відбору проб з насіння і спосіб витягання проби тканини з насіння</a>
Пристрій і спосіб відбору та первинної підготовки проб тканини для молекулярної генної діагностики, спосіб типування популяції тварин і пристрій для відбору проб у тварин
Номер патенту: 66854
Опубліковано: 15.06.2004
Автор: Брем Готфрід
МПК: G01N 1/04, C12Q 1/68, A22B 5/00, G01N 33/12
Мітки: відбору, підготовки, спосіб, популяції, пристрій, молекулярної, тварин, тканини, генної, діагностики, первинної, типування, проб
Формула / Реферат:
1. Пристрій для відбору і первинної підготовки проб тканини для молекулярної генної діагностики, які мають клітини, що містять ДНК, що включає пробоприймач (1) і пробовідбирач (4), який виконаний з можливістю, після витягання проби, введення в пробоприймач і герметичного його закриття, при цьому пробоприймач (1) складається з донної частини (2) і стінок (3), кришки, призначеної для закриття, яка виконана з можливістю легкого вдавлювання...
Система автоматичного відбору проб газу з циліндра двигуна внутрішнього згоряння
Номер патенту: 51494
Опубліковано: 15.09.2004
Автори: Атаманенко Микола Євгенович, Філіппов Анатолій Захарович, Герасимчук Юрій Анатолійович
МПК: G01N 1/22, G01M 15/00, F02B 71/00
Мітки: згоряння, двигуна, циліндра, газу, відбору, проб, автоматичного, внутрішнього, система
Формула / Реферат:
Система автоматичного відбору проб газу з циліндра двигуна внутрішнього згоряння, яка містить газовідбірний клапан з електромагнітним приводом, блок управління газовідбірним клапаном, яка відрізняється тим, що блок управління виконано електронним, зв'язаним через контролер з електромагнітною форсункою подачі палива в циліндр двигуна, а також з датчиком обертів колінчастого вала, для забезпечення автоматичного відбору дози газу в чітко...
Пристрій для відбору проб
Номер патенту: 36822
Опубліковано: 10.11.2008
Автори: Багрій Іван Володимирович, Подоляко Сергій Анатолійович, Примоленний Юрій Васильович
МПК: G01N 1/10
Мітки: пристрій, відбору, проб
Формула / Реферат:
Пристрій для відбору проб, що містить корпус із стаканом з двома вертикальними пазами та приєднувальними фланцями, поворотною вставкою з вертикальними пазами та трубкою, який відрізняється тим, що у корпусі встановлений фіксуючий гвинт, поворотна вставка обладнана зливним вентилем та ручкою, у поворотній вставці виконаний додатковий поздовжній вертикальний паз і некрізний горизонтальний паз на рівні фіксуючого гвинта, причому додатковий...
Спосіб відбору середньої проби для визначення якості патисонів
Номер патенту: 47632
Опубліковано: 10.02.2010
Автори: Гордієнко Інна Миколаївна, Пузік Людмила Михайлівна
МПК: A01F 25/00
Мітки: відбору, середньої, спосіб, проби, патисонів, якості, визначення
Формула / Реферат:
Спосіб відбору середньої проби для визначення якості патисонів, що включає формування середньої проби, який відрізняється тим, що від партії до 100 ящиків включно відбирають вибірку не менше 12 ящиків, з яких відбирають точкові проби масою 10 %, при цьому середня проба становить 14,4 кг кабачка.
Спосіб відбору проб стільникового меду для визначення наявності радіоактивних речовин
Номер патенту: 58915
Опубліковано: 15.08.2003
Автор: Разанов Сергій Федорович
МПК: A01K 59/00
Мітки: проб, наявності, стільникового, радіоактивних, спосіб, меду, речовин, відбору, визначення
Формула / Реферат:
Спосіб відбору проб стільникового меду для радіологічного дослідження, що включає відбір із вулика стільника з медом та вирізання з нього деякої частини для формування середньої проби масою 0,3-0,5 кг, який відрізняється тим, що для дослідження із стільника вирізають шість його частин розміром 25 см2 кожна.
Попередній патент: Модульний корпус, зокрема для світлодіодних сигнальних пристроїв
Наступний патент: Застосування стробілурину або його солі для підвищення стійкості рослин до низьких температур та спосіб підвищення стійкості рослин до низьких температур
Випадковий патент: Спосіб вирощування кристалу з утриманням розплаву у тиглі