Фотограмметричний пристрій
Номер патенту: 10215
Опубліковано: 15.11.2005
Автори: Ліщитович Леонід Іванович, Крячок Сергій Дмитрович, Данкевич Анатолій Федорович

Формула / Реферат
Фотограмметричний пристрій, що містить підставку з підйомними гвинтами, фотографічну камеру з можливістю нахилу у вертикальній площині та встановлювальним рівнем, яка з'єднана з теодолітом, який відрізняється тим, що фотографічна камера є цифровою і розміщена у футлярі, який прикріплений до осі обертання камери, з можливістю переміщення навколо осі обертання теодоліта та прикріплена до колонок теодоліта, на зоровій трубі якого розміщена лазерна лінійка, що має поворотний та нахиляючий механізми, а до осі обертання фотографічної камери прикріплена оптична система, яка розділяє випромінювання лазерної лінійки на два паралельні пучки з направленням в об'єктиви цифрової камери і теодоліта, причому цифрова камера може бути підключеною до персонального комп'ютера.
Текст
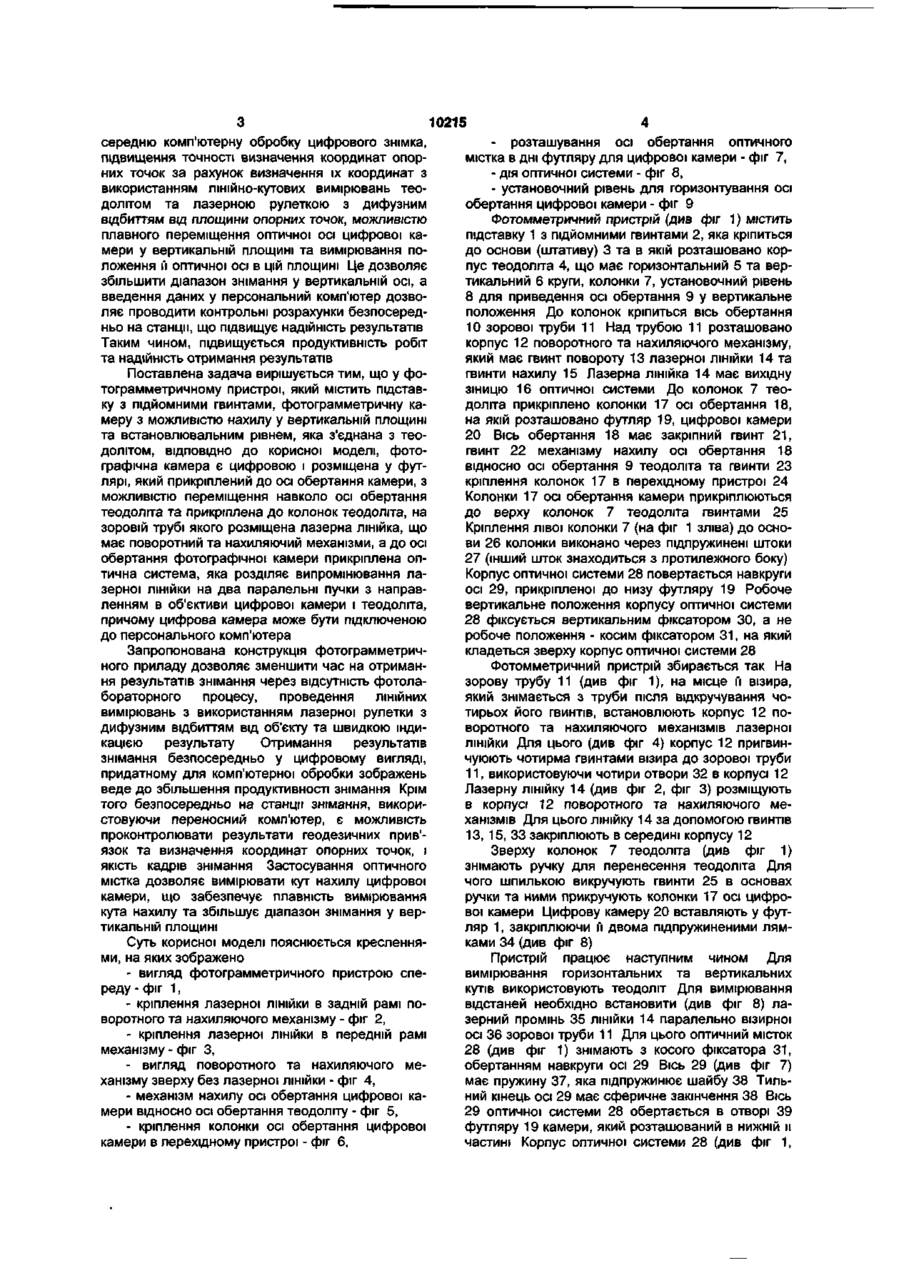
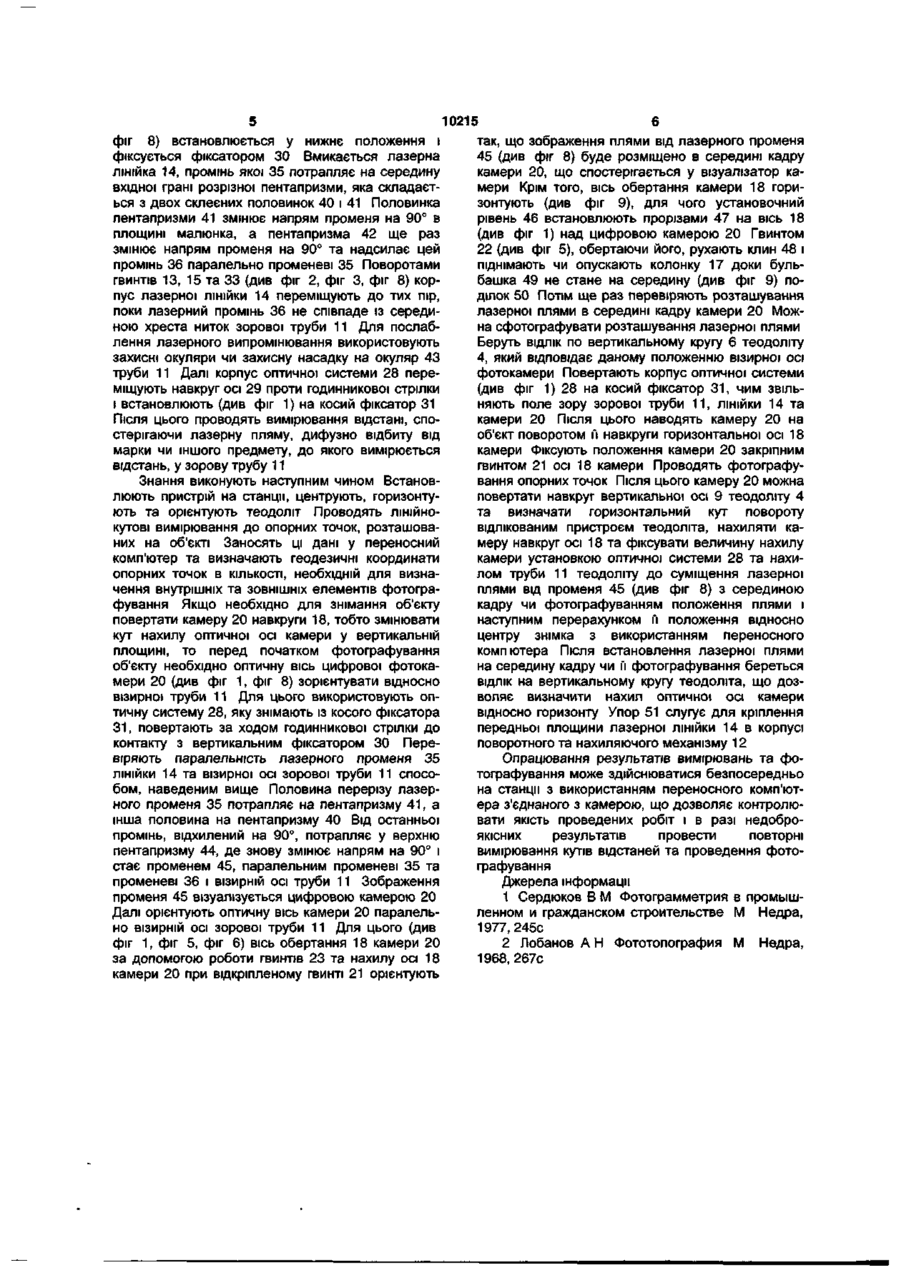
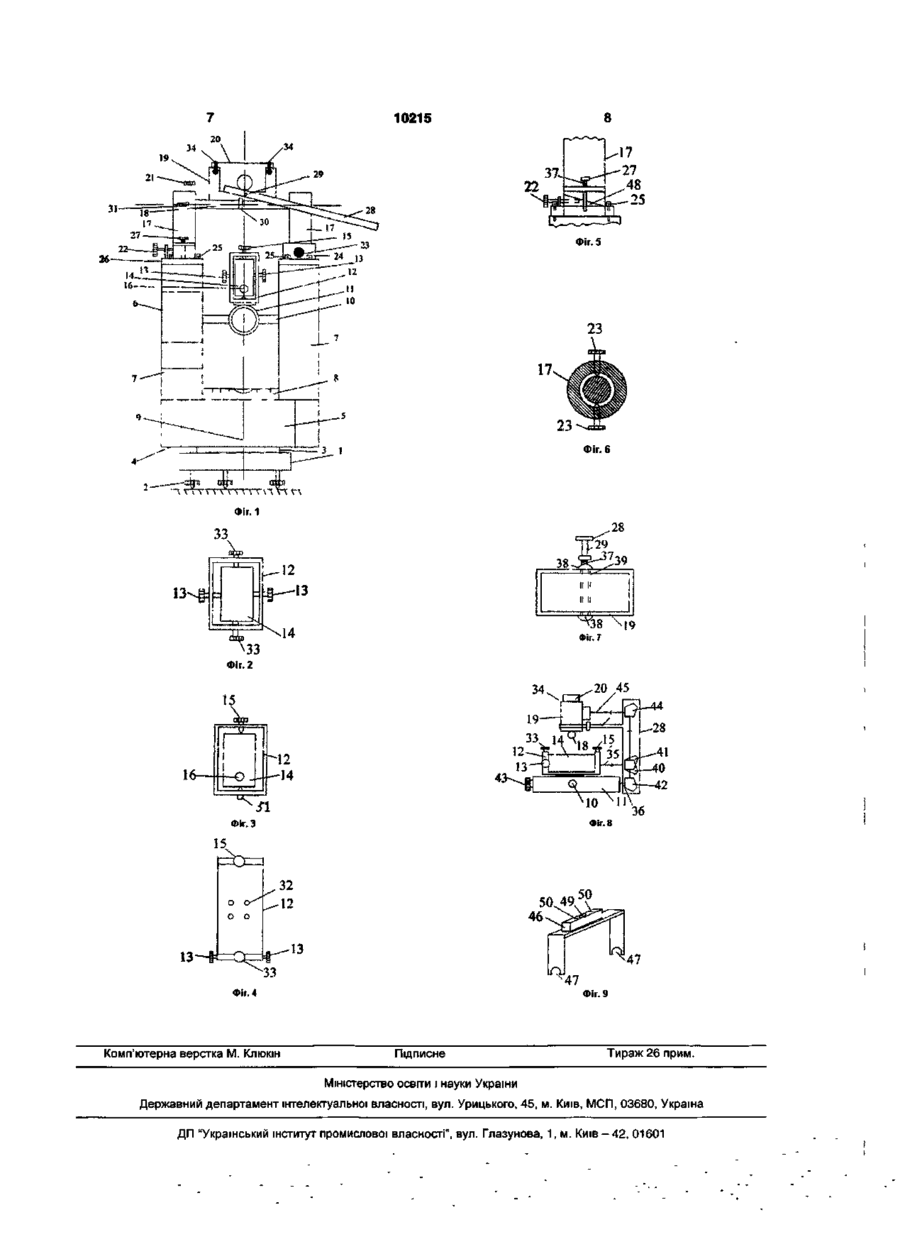
Фотограмметричний пристрій, що містить підставку з підйомними гвинтами, фотографічну камеру з можливістю нахилу у вертикальній площині та встановлювальним рівнем, яка з'єднана з теодолітом, який відрізняється тим, що фото графічна камера є цифровою і розміщена у футлярі, який прикріплений до осі обертання камери, з можливістю переміщення навколо осі обертання теодоліта та прикріплена до колонок теодоліта, на зоровій трубі якого розміщена лазерна лінійка, що має поворотний та нахиляючий механізми, а до осі обертання фотографічної камери прикріплена оптична система, яка розділяє випромінювання лазерної лінійки на два паралельні пучки з направленням в об'єктиви цифрової камери і теодоліта, причому цифрова камера може бути підключеною до персонального комп'ютера. Корисна модель відноситься до геодезії і фотограмметрії, може бути застосований в архітектурі, в маркшейдерії, будівництві, інженерних вишукуваннях, в землевпорядкуванні та кадастрі. Відомі фототеодоліти, у яких фотокамера є також і зоровою трубою теодоліта. Для цього в прикладну рамку фотокамери вставляють спеціальну касету з окуляром, яка разом з об'єктивом фотокамери утворює оптичну систему зорової труби. За допомогою такої труби, шляхом її поворотів у горизонтальній та вертикальній площинах, вимірюють горизонтальні та вертикальні кути. [1, 2]. Відомі фототеодоліти, які складаються з фотокамери, до якої додається серійний теодоліт, наприклад, фототеодоліт «Геодезія», С-Зв, С-5в, С-4, TAN, Photheo 19/1318. Робота камерою та фототеодолітом виконується незалежно. Фотокамера має орієнтирний пристрій, що дозволяє встановлювати оптичну вісь фотокамери на заданий горизонтальний кут до базису знімання. Найбільш близьким аналогом пристрою, що заявляється, є фототеодоліт Р-30 фірми Вільд. Він містить підставку з підйомними гвинтами, що має отвір, куди встановлюється вертикальна вісь корпусу пристрою. Корпус, до якого прикріплено два взаємно перпендикулярні рівні, має лагери, до яких кріпиться горизонтальна вісь фотокамери. Зверху корпусу знаходиться отвір для осі теодоліта. Камера встановлюється в горизонтальне чи похиле положення за допомогою штанги на хилів, яка кріпиться до корпусу. Камеру можна нахиляти вниз на кути: - 7, - 14; - 21, - 28 9Г та вгору на кут + 7 9Г та на відлік 0 9 г - горизонтальне положення. Тобто камера має ступінчатий, не плавний нахил. Теодоліт має зорову трубу з горизонтальними та вертикальними кругами. Теодоліт та камера розташовані так, що при установці площини візування теодоліта в напрямку осі фотокамери відлік на горизонтальному крузі дорівнює нулю [2]. Під час роботи відомого фототеодоліту Р-30 вимірювання відстаней до опорних точок та геодезичних пунктів виконується з використанням рулетки чи вимірюванням паралактичного кута теодолітом на горизонтальну рейку відомої довжини, що збільшує час на виконання робіт. Недоліком існуючих фототеодолітів є необхідність додаткового фотолабораторного обладнання для отримання позитива з фотоплівки з проявленням зображення та фіксації, промивки, сушіння, а також можливе його сканування для отримання цифрового знімку. Крім того неможливий надійний контроль вимірювань безпосередньо під час знімальних робіт. В основу корисної моделі поставлена задача вдосконалення відомого пристою, в якому шляхом використання лазерної рулетки, встановленої на зоровій трубі теодоліта, цифрової фотокамери, яка оптично зв'язана із зоровою трубою теодоліта та використання персонального комп'ютера забезпечується зменшення часу на проведення вимірювань та отримання результату через безпо Ю 10215 середню комп'ютерну обробку цифрового знімка, - розташування осі обертання оптичного підвищення точності визначення координат опормістка в дні футляру для цифрової камери - фіг 7, них точок за рахунок визначення їх координат з - дія оптичної системи - фіг 8, використанням лінійно-кутових вимірювань тео- установочний рівень для горизонтування осі долітом та лазерною рулеткою з дифузним обертання цифрової камери - фіг 9 відбиттям в/д площини опорних точок, можливістю Фотомметричний пристрій (див фіг 1) містить плавного переміщення оптичної осі цифрової капідставку 1 з підйомними гвинтами 2, яка кріпиться мери у вертикальній площині та вимірювання подо основи (штативу) 3 та в якій розташовано корложення її оптичної осі в цій площині Це дозволяє пус теодоліта 4, що має горизонтальний 5 та верзбільшити діапазон знімання у вертикальній осі, а тикальний 6 круги, колонки 7, установочний рівень введення даних у персональний комп'ютер дозво8 для приведення осі обертання 9 у вертикальне ляє проводити контрольні розрахунки безпосередположення До колонок кріпиться вісь обертання ньо на станції, що підвищує надійність результатів 10 зорової труби 11 Над трубою 11 розташовано Таким чином, підвищується продуктивність робіт корпус 12 поворотного та нахиляючого механізму, та надійність отримання результатів який має гвинт повороту 13 лазерної ЛІНІЙКИ 14 та гвинти нахилу 15 Лазерна лінійка 14 має вихідну Поставлена задача вирішується тим, що у фозіницю 16 оптичної системи До колонок 7 теотограмметричному пристрої, який містить підставдоліта прикріплено колонки 17 осі обертання 18, ку з підйомними гвинтами, фотограмметричну кана якій розташовано футляр 19, цифрової камери меру з можливістю нахилу у вертикальній площині 20 Вісь обертання 18 має закріпний гвинт 21, та встановлювальним рівнем, яка з'єднана з теогвинт 22 механізму нахилу осі обертання 18 долітом, ВІДПОВІДНО до корисної моделі, фотовідносно осі обертання 9 теодоліта та гвинти 23 графічна камера є цифровою і розміщена у футкріплення колонок 17 в перехідному пристрої 24 лярі, який прикріплений до осі обертання камери, з Колонки 17 осі обертання камери прикріплюються можливістю переміщення навколо осі обертання до верху колонок 7 теодоліта гвинтами 25 теодоліта та прикріплена до колонок теодоліта, на Кріплення лівої колонки 7 (на фіг 1 зліва) до оснозоровій трубі якого розміщена лазерна лінійка, що ви 26 колонки виконано через підпружинені штоки має поворотний та нахиляючий механізми, а до осі обертання фотографічної камери прикріплена оп27 (інший ШТОК знаходиться з протилежного боку) тична система, яка розділяє випромінювання лаКорпус оптичної системи 28 повертається навкруги зерної ЛІНІЙКИ на два паралельні пучки з направосі 29, прикріпленої до низу футляру 19 Робоче ленням в об'єктиви цифрової камери і теодоліта, вертикальне положення корпусу оптичної системи причому цифрова камера може бути підключеною 28 фіксується вертикальним фіксатором ЗО, а не до персонального комп'ютера робоче положення - косим фіксатором 31, на який кладеться зверху корпус оптичної системи 28 Запропонована конструкція фотограмметричного приладу дозволяє зменшити час на отриманФотомметричний пристрій збирається так На ня результатів знімання через відсутність фотолазорову трубу 11 (див фіг 1), на місце її візира, бораторного процесу, проведення ЛІНІЙНИХ який знімається з труби після відкручування човимірювань з використанням лазерної рулетки з тирьох його гвинтів, встановлюють корпус 12 подифузним відбиттям від об'єкту та швидкою індиворотного та нахиляючого механізмів лазерної кацією результату Отримання результатів ЛІНІЙКИ Для цього (див фіг 4) корпус 12 пригвинзнімання безпосередньо у цифровому вигляді, чуюють чотирма гвинтами візира до зорової труби придатному для комп'ютерної обробки зображень 11, використовуючи чотири отвори 32 в корпусі 12 веде до збільшення продуктивності знімання Крім Лазерну лінійку 14 (див фіг 2, фіг 3) розміщують того безпосередньо на станції знімання, викорив корпусі 12 поворотного та нахиляючого местовуючи переносний комп'ютер, є можливість ханізмів Для цього лінійку 14 за допомогою гвинтів проконтролювати результати геодезичних прив'13, 15, 33 закріплюють в середині корпусу 12 язок та визначення координат опорних точок, і Зверху колонок 7 теодоліта (див фіг 1) якість кадрів знімання Застосування оптичного знімають ручку для перенесення теодоліта Для містка дозволяє вимірювати кут нахилу цифрової чого шпилькою викручують гвинти 25 в основах камери, що забезпечує плавність вимірювання ручки та ними прикручують колонки 17 осі цифрокута нахилу та збільшує діапазон знімання у вервої камери Цифрову камеру 20 вставляють у футтикальній площині ляр 1, закріплюючи її двома підпружиненими лямСуть корисної моделі пояснюється кресленняками 34 (див фіг 8) ми, на яких зображено Пристрій працює наступним чином Для - вигляд фотограмметричного пристрою спевимірювання горизонтальних та вертикальних реду-фіг 1, кутів використовують теодоліт Для вимірювання - кріплення лазерної ЛІНІЙКИ В задній рамі повідстаней необхідно встановити (див фіг 8) лаворотного та нахиляючого механізму - фіг 2, зерний промінь 35 ЛІНІЙКИ 14 паралельно візирної осі 36 зорової труби 11 Для цього оптичний місток - кріплення лазерної ЛІНІЙКИ В передній рамі механізму - фіг З, 28 (див фіг 1) знімають з косого фіксатора 31, - вигляд поворотного та нахиляючого меобертанням навкруги осі 29 Вісь 29 (див фіг 7) ханізму зверху без лазерної ЛІНІЙКИ - фіг 4, має пружину 37, яка підпружинює шайбу 38 Тиль- механізм нахилу осі обертання цифрової каний кінець осі 29 має сферичне закінчення 38 Вісь мери відносно осі обертання теодоліту - фіг 5, 29 оптичної системи 28 обертається в отворі 39 - кріплення колонки осі обертання цифрової футляру 19 камери, який розташований в нижній н камери в перехідному пристрої - фіг 6, частині Корпус оптичної системи 28 (див фіг 1, 10215 фіг 8) встановлюється у нижнє положення і фіксується фіксатором ЗО Вмикається лазерна лінійка 14, промінь якої 35 потрапляє на середину вхідної грані розрізної пентапризми, яка складається з двох склеєних половинок 40 і 41 Половинка пентапризми 41 змінює напрям променя на 90° в площині малюнка, а пентапризма 42 ще раз змінює напрям променя на 90° та надсилає цей промінь 36 паралельно променеві 35 Поворотами гвинтів 13, 15 та 33 (див фіг 2, фіг 3, фіг 8) корпус лазерної лінійки 14 переміщують до тих пір, поки лазерний промінь 36 не співпаде із серединою хреста ниток зорової труби 11 Для послаблення лазерного випромінювання використовують захисні окуляри чи захисну насадку на окуляр 43 труби 11 Далі корпус оптичної системи 28 переміщують навкруг осі 29 проти годинникової стрілки і встановлюють (див фіг 1) на косий фіксатор 31 Після ЦЬОГО проводять вимірювання відстані, спостерігаючи лазерну пляму, дифузно відбиту від марки чи іншого предмету, до якого вимірюється відстань, у зорову трубу 11 Знання виконують наступним чином Встановлюють пристрій на станції, центрують, горизонтують та орієнтують теодоліт Проводять ліншнокутові вимірювання до опорних точок, розташованих на об'єкті Заносять ці дані у переносний комп'ютер та визначають геодезичні координати опорних точок в КІЛЬКОСТІ, необхідній для визначення внутрішніх та ЗОВНІШНІХ елементів фотографування Якщо необхідно для знімання об'єкту повертати камеру 20 навкруги 18, тобто змінювати кут нахилу оптичної осі камери у вертикальній площині, то перед початком фотографування об'єкту необхідно оптичну вісь цифрової фотокамери 20 (див фіг 1, фіг 8) зорієнтувати відносно візирної труби 11 Для цього використовують оптичну систему 28, яку знімають із косого фіксатора 31, повертають за ходом годинникової стрілки до контакту з вертикальним фіксатором ЗО Перевіряють паралельність лазерного променя 35 ЛІНІЙКИ 14 та візирної осі зорової труби 11 способом, наведеним вище Половина перерізу лазерного променя 35 потрапляє на пентапризму 41, а інша половина на пентапризму 40 Від останньої промінь, відхилений на 90°, потрапляє у верхню пентапризму 44, де знову змінює напрям на 90° і стає променем 45, паралельним променеві 35 та променеві 36 і візирній осі труби 11 Зображення променя 45 візуалізується цифровою камерою 20 Далі орієнтують оптичну вісь камери 20 паралельно візирній осі зорової труби 11 Для цього (див фіг 1, фіг 5, фіг 6) вісь обертання 18 камери 20 за допомогою роботи гвинтів 23 та нахилу осі 18 камери 20 при відкріпленому гвинті 21 орієнтують так, що зображення плями від лазерного променя 45 (див фіг 8) буде розміщено в середині кадру камери 20, що спостерігається у візуалізатор камери Крім того, вісь обертання камери 18 горизонтують (див фіг 9), для чого установочний рівень 46 встановлюють прорізами 47 на вісь 18 (див фіг 1) над цифровою камерою 20 Гвинтом 22 (див фіг 5), обертаючи його, рухають клин 48 і піднімають чи опускають колонку 17 доки бульбашка 49 не стане на середину (див фіг 9) поділок 50 Потім ще раз перевіряють розташування лазерної плями в середині кадру камери 20 Можна сфотографувати розташування лазерної плями Беруть ВІДЛІК по вертикальному кругу 6 теодоліту 4, який відповідає даному положенню візирної осі фотокамери Повертають корпус оптичної системи (див фіг 1) 28 на косий фіксатор 31, чим звільняють поле зору зорової труби 11, ЛІНІЙКИ 14 та камери 20 Після ЦЬОГО наводять камеру 20 на об'єкт поворотом її навкруги горизонтальної осі 18 камери Фіксують положення камери 20 закріпним гвинтом 21 осі 18 камери Проводять фотографування опорних точок Після ЦЬОГО камеру 20 можна повертати навкруг вертикальної осі 9 теодоліту 4 та визначати горизонтальний кут повороту відлікованим пристроєм теодоліта, нахиляти камеру навкруг осі 18 та фіксувати величину нахилу камери установкою оптичної системи 28 та нахилом труби 11 теодоліту до суміщення лазерної плями від променя 45 (див фіг 8) з серединою кадру чи фотографуванням положення плями і наступним перерахунком її положення відносно центру знімка з використанням переносного компютера Після встановлення лазерної плями на середину кадру чи її фотографування береться ВІДЛІК на вертикальному кругу теодоліта, що дозволяє визначити нахил оптичної осі камери відносно горизонту Упор 51 слугує для кріплення передньої площини лазерної ЛІНІЙКИ 14 В корпусі поворотного та нахиляючого механізму 12 Опрацювання результатів вимірювань та фотографування може здійснюватися безпосередньо на станції з використанням переносного комп'ютера з'єднаного з камерою, що дозволяє контролювати якість проведених робіт і в разі недоброякісних результатів провести повторні вимірювання кутів відстаней та проведення фотографування Джерела інформації 1 Сердюков В М Фотограмметрия в промышленном и гражданском строительстве М Недра, 1977,245с 2 Лобанов А Н Фототопография М Недра, 1968,267с 10215 31Фіг. 5 Фіг. 6 Фіг. 1 ,28 33 -12 ^—13 !І І» II Іі ^5849 Фіг. 7 Фіг. 2 15 і2 -14 Фіг.З Фіг. 8 Фіг. 4 Комп'ютерна верстка М. Клюкш Фіг. 9 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюPhotogrammetric device
Автори англійськоюKriachok Serhii Dmytrovych
Назва патенту російськоюФотограмметрическое устройство
Автори російськоюКрячок Сергей Дмитриевич
МПК / Мітки
МПК: G01C 1/00
Мітки: фотограмметричний, пристрій
Код посилання
<a href="https://ua.patents.su/4-10215-fotogrammetrichnijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Фотограмметричний пристрій</a>
Пристрій для вибірки пазів у дерев’яних виробах
Номер патенту: 664
Опубліковано: 16.10.2000
Автор: Колесніков Євген Миколайович
МПК: B27F 1/00
Мітки: пазів, дерев'яних, пристрій, вибірки, виробах
Формула / Реферат:
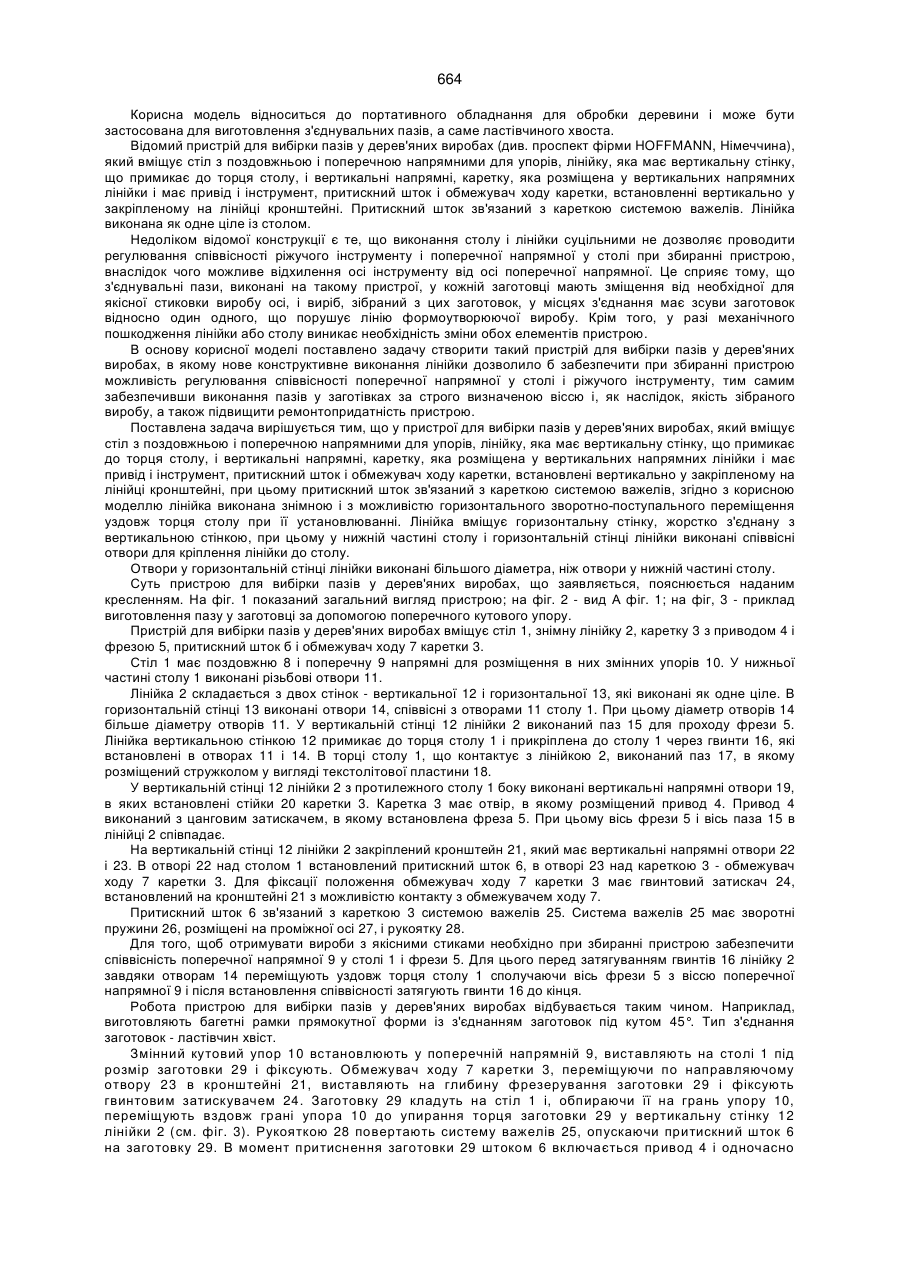
1. Пристрій для вибірки пазів у дерев'яних виробах, який вміщує стіл з поздовжньою і поперечною напрямними для упорів лінійку, яка має вертикальну стінку, що примикає до торця столу, і вертикальні напрямні, каретку, яка розміщена у вертикальних напрямних лінійки і має привід і інструмент, притискний шток ι обмежувач ходу каретки, встановлені вертикально у закріпленому на лінійці кронштейні, при цьому притискний шток зв'язаний з кареткою...
Пристрій для вимірювання лінійних розмірів
Номер патенту: 55810
Опубліковано: 15.04.2003
Автори: Глушко Галина Степанівна, Малащенко Володимир Олександрович, Ванкевич Петро Іванович
МПК: G01B 11/08, G01B 11/00
Мітки: пристрій, лінійних, розмірів, вимірювання
Формула / Реферат:
Пристрій для вимірювання лінійних розмірів, що містить лінійку, на якій встановлений повзун, та оптичний прилад, який відрізняється тим, що лінійка оснащена слідкуючим механізмом, який виконаний у вигляді двох циліндричних кілець, встановлених з можливістю обертання на паралельних осях в одній площині, і постійних магнітів, симетрично закріплених по боках циліндричних кілець з зазорами відносно деталі, причому вісь симетрії слідкуючого...
Пристрій канонічного розкладу числа на множники
Номер патенту: 34613
Опубліковано: 15.03.2001
Автори: Радомський Володимир Антонович, Процько Ігор Омельянович
МПК: G06F 7/498, G06F 7/04
Мітки: канонічного, числа, множники, розкладу, пристрій
Формула / Реферат:
Пристрій канонічного розкладу числа на множники, що містить блок керування з входом числа розкладу та виходом множника розкладу, блок порівняння, вихід якого з'єднаний з першим входом блоку керування, а перший вихід блоку керування з'єднаний входом блоку пам'яті простих множників, вихід якого з'єднаний з другим входом блоку порівняння, а другий вихід блоку керування з'єднаний з другим входом мультиплексора, який відрізняється тим, що...
Пристрій бобонича п.п. для підрахунку товщини діелектричного матеріалу
Номер патенту: 71809
Опубліковано: 15.12.2004
Автор: Бобонич Петро Петрович
МПК: G01N 21/27, G01N 21/35, G01N 21/17
Мітки: матеріалу, підрахунку, п.п, товщини, пристрій, бобонича, діелектричного
Формула / Реферат:
1. Пристрій для підрахунку товщини діелектричного матеріалу, що містить джерело випромінювання та приймач для підрахунку товщини тканини або паперу, який відрізняється тим, що приймач виконаний із фотоприймача структури р-n-р-n-типу з інверсією знаку електрорушійної сили.2. Пристрій за п. 1, який відрізняється тим що як приймач застосовують лінійку фотоприймачів структури р-n-р-n-типу з інверсією знаку електрорушійної сили.3....
Човниковий пристрій

Номер патенту: 67884
Опубліковано: 15.07.2004
Автори: Капустенський Петро Гнатович, Манзюк Едуард Андрійович, Костогриз Сергій Григорович
МПК: D05B 57/00
Мітки: човниковий, пристрій
Формула / Реферат:
Човниковий пристрій, який містить трибоспряження швейний гачок - шпулетримач, який відрізняється тим, що центр мас швейного гачка в умовах експлуатації де відповідно - частота обертання швейного гачка, р - власна частота поперечних коливань консолі човникового вала, розташовано на лінії у послідовності...
Попередній патент: Система змащування двигуна внутрішнього згоряння
Наступний патент: Пристрій для центрування
Випадковий патент: Аміди антранілової кислоти у комбінації з фунгіцидами