Кривошипно-шатунний механізм
Номер патенту: 104012
Опубліковано: 25.12.2013
Автори: Зіборов Кирило Альбертович, Крівда Віталій Валерійович, Ванжа Геннадій Купріянович, Бас Костянтин Маркович, Захаренко Віталій Олександрович

Формула / Реферат
Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень та поршневий палець, який відрізняється тим, що містить додатковий співвісний поршневий палець, при цьому поршневі пальці звернені один до одного своїми конічними торцевими поверхнями з утворенням простору, в якому розміщене тіло кочення, а також поршневі пальці встановлені з можливістю переміщення та фіксації в осьовому напрямку.
Текст
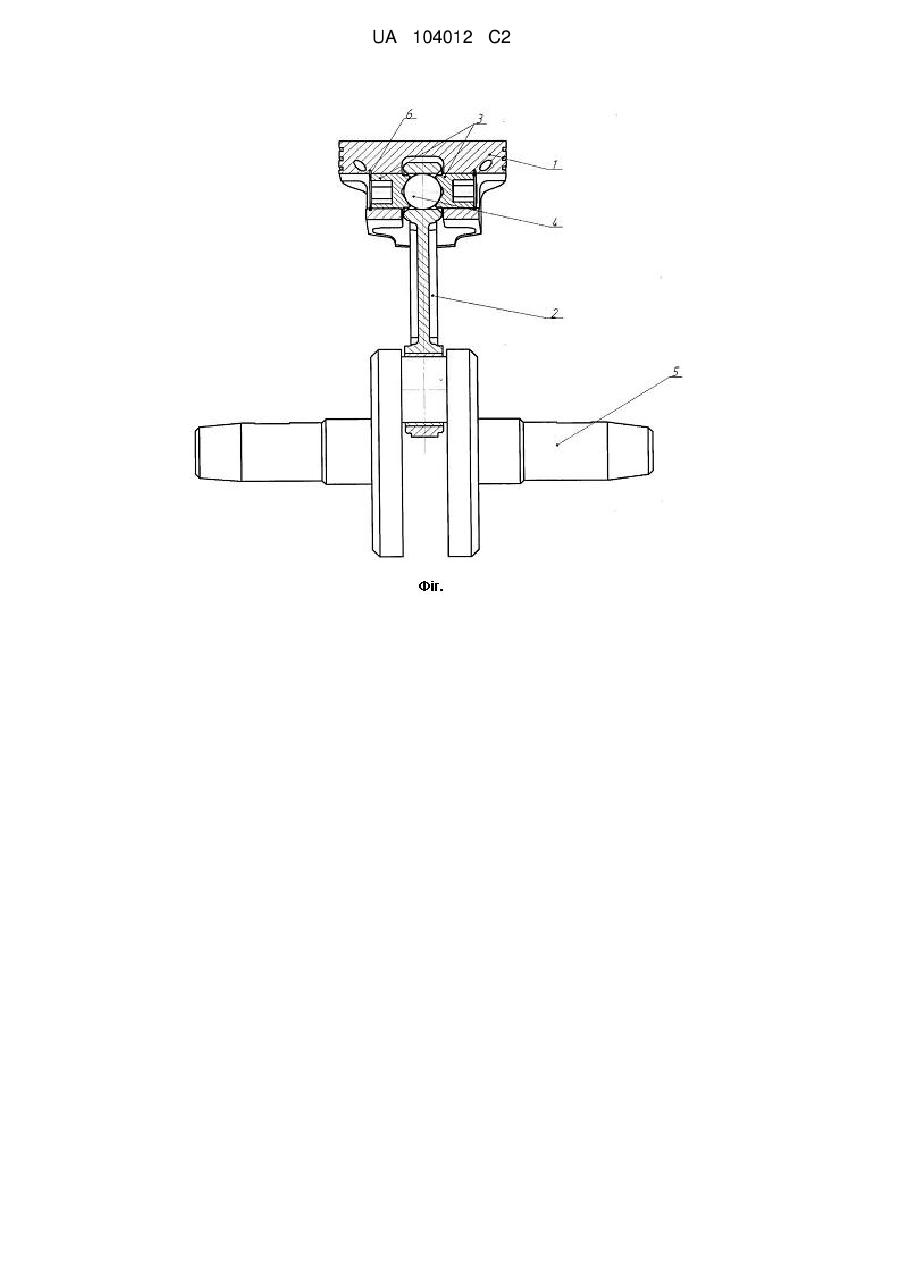
Реферат: Винахід належить до механізмів, що застосовуються як у промислових, так і в побутових вузлах, де необхідно перетворення поступального руху в обертальний у прямому та зворотному напрямках, переважно у двигунах внутрішнього згоряння. Кривошипно-шатунний механізм включає колінчастий вал, шатун, поршень та два співвісні поршневі пальці, які звернені один до одного своїми конічними торцевими поверхнями з утворенням простору, в якому розміщене тіло кочення. При цьому пальці встановлені з можливістю переміщення та фіксації в осьовому напрямку. Винахід дозволяє зменшити динамічне навантаження ланок кривошипно-шатунного механізму у зв'язку з усуненням можливості перекосу, підвищити надійність, довговічність та плавність ходу. UA 104012 C2 (12) UA 104012 C2 UA 104012 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до механізмів, що застосовуються як у промислових, так і в побутових вузлах, де необхідно перетворення поступального руху в обертальний у прямому та зворотному напрямках, переважно у двигунах внутрішнього згоряння. Відомий кривошипно-шатунний механізм, який містить поршень, опорний елемент, пов'язаний з шатуном за допомогою поршневого пальця (Патент RU 2035603 C1; F02B 75/32, F02B 75/18). У зв'язку з конструктивними особливостями вектор сили, який діє вздовж осі поршня в момент займання горючої суміші, спрямований по прямій, яка складає з поздовжньою віссю шатуна кут близько 3-9°, що знижує коефіцієнт корисної дії двигуна внутрішнього згорання. Крім того, в традиційному кривошипно-шатунному механізмі в трьох зчленуваннях передбачено застосування підшипників кочення і ковзання. Недолік: таке технічне рішення ускладнює процес виготовлення та експлуатації кривошипношатунного механізму, оскільки вимагає високої точності виробничого обладнання при виготовленні деталей вузла. Найбільш близьким технічним рішенням є кривошипно-шатунний механізм, який містить поршень, опорний елемент, пов'язаний з шатуном за допомогою поршневого пальця (Патент Великобританії N 1043021, кл. F16J 1/16, опубл. 1965), при цьому, шатун встановлений на центральному циліндричному поясі пальця. Недоліками аналога є мала надійність, тому що постійно існує можливість виникнення перекосів під час точково-лінійної передачі зусилля в поршневому пальці у момент робочого ходу, відносно високі масо-габаритні показники, потрібно підвищення надійності, довговічності, простоти виготовлення та збірки механізму. В основу винаходу поставлено задачу удосконалення відомого кривошипно-шатунного механізму, в якому введення нових конструктивних елементів та їх взаємного розташування досягається можливість саморегуляції системи в результаті можливості перерозподілу реактивних знакоперемінних навантажень на тіло кочення, виключення перекосів, прийом передачі енергії в момент робочого ходу, і за рахунок цього простота виготовлення, збірки, надійності та довговічності механізму. Поставлена задача досягається тим, що у відомому кривошипно-шатунному механізмі, який має колінчастий вал, шатун, поршень, палець, згідно з винаходом, встановлений додатковий, співвісний палець, при тому пальці установлено торцевими поверхнями (одна до одної), з утворенням простору, в якому розміщене введене тіло кочення, з можливістю переміщення та фіксації в осьовому напрямку. Суть винаходу пояснюється кресленням, на якому зображено пропонований механізм в поперечному розрізі, що містить поршень 1, пов'язаний з шатуном 2 за допомогою введених пальців 3 і тіла кочення 4. Шатун 2 орієнтується щодо колінчастого вала 5 за допомогою тіла кочення 4. Ступінь пристосування визначається зазором між тілом кочення і введеними пальцями 3, за рахунок осьового переміщення і фіксації їх в заданому положенні за допомогою стопорних кілець 6. Відбувається саморегуляція системи в результаті перерозподілу реактивних навантажень за рахунок самовизначення тіла кочення 4 в просторі, створеному конічними торцевими поверхнями введених пальців 3. Другі кінці пальців 3 мають різьбову зовнішню, конічно-торцеву поверхню, в якій розташовується тіло кочення 4. Пристрій працює наступним чином. Під час робочого процесу відбувається передача зусилля займистою сумішшю, що перетворює поступальний рух поршня 1 в обертальний колінчастого валу 5, через опорні конічні поверхні введених пальців 3, тіло кочення 4, шатуна 2. Ступінь саморегуляції механізму визначається величиною зазору між тілом кочення 4 та опорно-конічними пальцями 3. Фактично відбувається постійна кільцева передача зусилля в роз'ємному елементі з тілом кочення 4 у момент робочого ходу, в порівнянні з аналогами, де виникають перекоси поршня по відношенню до пальців, отже і нестабільність робочого процесу за рахунок точково-лінійної передачі зусилля, що є перевагою. Виконання такого механізму дозволяє зменшити ширину головки шатуна 2 і значно поліпшити умови роботи кривошипно-шатунного механізму за рахунок виключення дії на нього згинаючих навантажень, які виникають в процесі виготовлення і складання системи. Таким чином, технічне рішення може бути використане у двигунах внутрішнього згоряння, а також у компресорах і т. п, забезпечуючи стабільність режиму роботи за рахунок саморегуляції, надійності та довговічності механізму. 1 UA 104012 C2 ФОРМУЛА ВИНАХОДУ 5 Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень та поршневий палець, який відрізняється тим, що містить додатковий співвісний поршневий палець, при цьому поршневі пальці звернені один до одного своїми конічними торцевими поверхнями з утворенням простору, в якому розміщене тіло кочення, а також поршневі пальці встановлені з можливістю переміщення та фіксації в осьовому напрямку. Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюZiborov Kyrylo Albertovych, Vanzha Hennadii Kupriianovych, Bas Kostiantyn Markovych, Zakharenko Vitalii Oleksandrovych
Автори російськоюЗиборов Кирилл Альбертович, Ванжа Геннадий Куприянович, Бас Константин Маркович, Захаренко Виталий Александрович
МПК / Мітки
МПК: F16C 31/00, F16C 9/00, F16J 1/00
Мітки: кривошипно-шатунний, механізм
Код посилання
<a href="https://ua.patents.su/4-104012-krivoshipno-shatunnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Кривошипно-шатунний механізм</a>
Кривошипно-шатунний механізм

Номер патенту: 67919
Опубліковано: 12.03.2012
Автори: Бас Костянтин Маркович, Захаренко Віталій Олександрович, Зіборов Кирило Альбертович, Ванжа Геннадій Купріянович, Крівда Віталій Валерійович
МПК: F16C 7/00
Мітки: кривошипно-шатунний, механізм
Формула / Реферат:
Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень, палець, який відрізняється тим, що має встановлений додатковий, співвісний палець, при цьому пальці установлено торцевими поверхнями (одна до одної), з утворенням простору, в якому розміщене введене тіло кочення, з можливістю переміщення та фіксації в осьовому напрямку.
Кривошипно-шатунний механізм
Номер патенту: 104009
Опубліковано: 25.12.2013
Автори: Зіборов Кирило Альбертович, Бас Костянтин Маркович, Ванжа Геннадій Купріянович, Крівда Віталій Валерійович
МПК: F16C 31/00, F16J 1/00, F16C 9/00
Мітки: кривошипно-шатунний, механізм
Формула / Реферат:
Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень та поршневий палець, який відрізняється тим, що містить додатковий співвісний поршневий палець та опорну вставку, розміщену між поршневими пальцями, при цьому поршневі пальці та опорна вставка звернені один до одної, відповідно, своїми конічними торцевими поверхнями з утворенням просторів, в яких розміщені тіла кочення, причому поршневі пальці встановлені з можливістю...
Кривошипно-шатунний механізм
Номер патенту: 73814
Опубліковано: 10.10.2012
Автори: Крівда Віталій Валерійович, Блохін Сергій Євгенович, Ванжа Геннадій Купріянович, Захаренко Віталій Олександрович, Зіборов Кирило Альбертович, Федоряченко Сергій Олександрович, Бас Костянтин Маркович
МПК: F16C 7/00
Мітки: механізм, кривошипно-шатунний
Формула / Реферат:
Кривошипно-шатунний механізм, що містить колінчастий вал, шатун, поршень, який відрізняється тим, що введені тіла кочення, розміщені між виконаними співвісно встановленими двома конічними контактними поверхнями колінчастого вала і введеного упора, з можливістю осьового переміщення останнього і фіксацією в заданому положенні колінчастого вала.
Кривошипно-шатунний механізм
Номер патенту: 67840
Опубліковано: 12.03.2012
Автори: Крівда Віталій Валерійович, Ванжа Геннадій Купріянович, Зіборов Кирило Альбертович, Бас Костянтин Маркович
МПК: F16C 7/00
Мітки: кривошипно-шатунний, механізм
Формула / Реферат:
Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень, який відрізняється тим, що головка шатуна містить опорну вставку, що має з торців контактні конічні отвори, в поршні співвісно вставці встановлені жорстко закріплені дві півосі, і звернені вставки аналогічними контактними конічними поверхнями, між якими розміщені тіла кочення, а другі кінці півосей мають отвори, і закріплені з можливістю переміщення їх в осьовому...
Кривошипно-шатунний механізм
Номер патенту: 63967
Опубліковано: 16.02.2004
Автор: Пеннінг Клаус
МПК: G01F 3/02
Мітки: механізм, кривошипно-шатунний
Формула / Реферат:
1. Кривошипно-шатунний механізм для чутливого до температури пристрою, зокрема для сильфонного газометра, що містить- обертову навколо осі деталь (1),- принаймні один елемент (2) кривошипно-шатунного механізму, з'єднаний з обертовою деталлю (1) з можливістю сумісного обертання разом з нею,- принаймні один поворотний важіль (4), з'єднаний з можливістю повороту з елементом (2) кривошипно-шатунного механізму,-...
Попередній патент: Спосіб одержання гранул або брикетів
Наступний патент: Спосіб виготовлення закапсульованих в вуглецеві оболонки наночастинок нікелю
Випадковий патент: Спосіб каплуненка-косінова отримання універсального дезінфікуючого засобу