Кривошипно-шатунний механізм
Номер патенту: 67919
Опубліковано: 12.03.2012
Автори: Ванжа Геннадій Купріянович, Зіборов Кирило Альбертович, Захаренко Віталій Олександрович, Крівда Віталій Валерійович, Бас Костянтин Маркович

Формула / Реферат
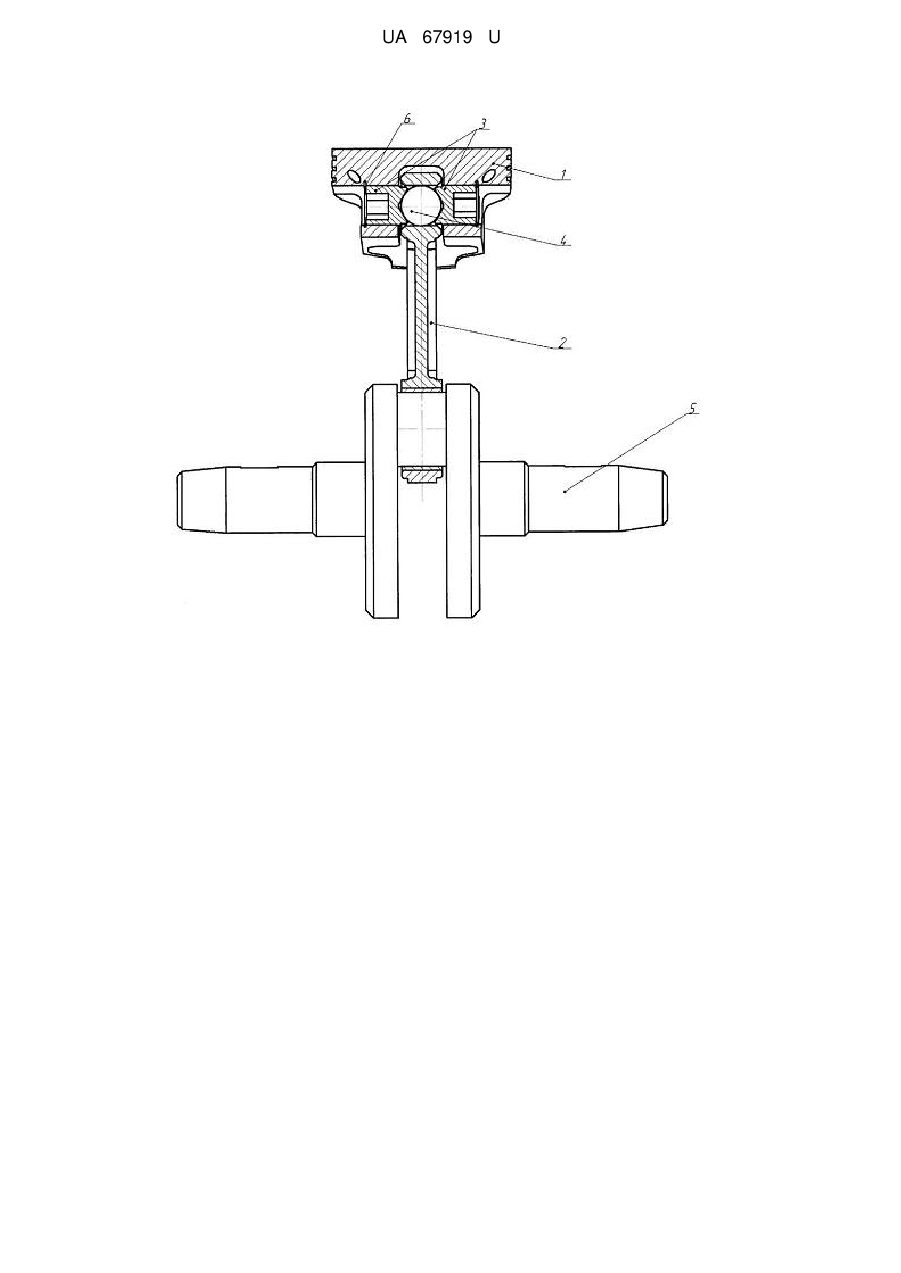
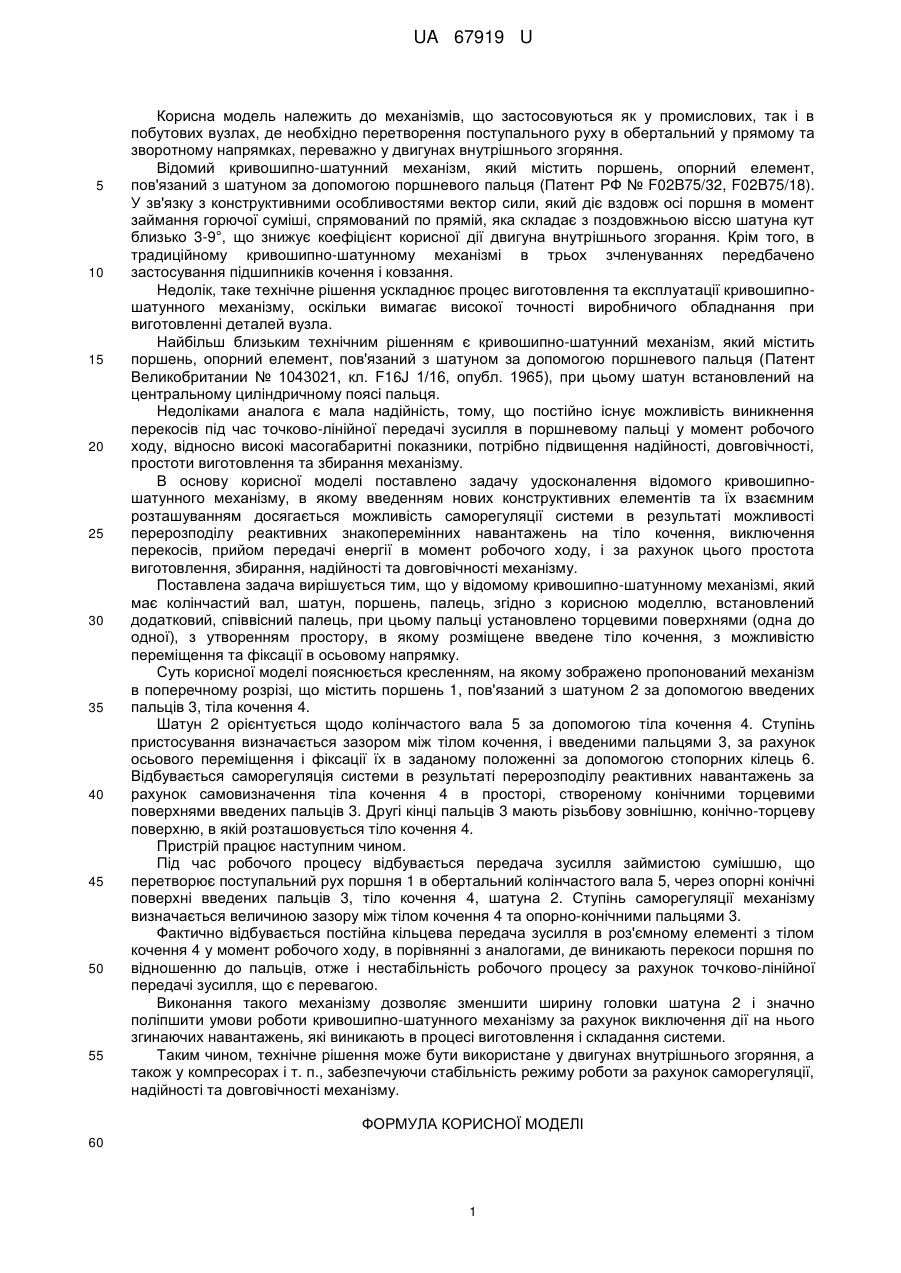
Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень, палець, який відрізняється тим, що має встановлений додатковий, співвісний палець, при цьому пальці установлено торцевими поверхнями (одна до одної), з утворенням простору, в якому розміщене введене тіло кочення, з можливістю переміщення та фіксації в осьовому напрямку.
Текст
Реферат: Кривошипно-шатунний механізм включає додатковий, співвісний палець, при цьому пальці установлено торцевими поверхнями (одна до одної), з утворенням простору, в якому розміщене введене тіло кочення, з можливістю переміщення та фіксації в осьовому напрямку. UA 67919 U (54) КРИВОШИПНО-ШАТУННИЙ МЕХАНІЗМ UA 67919 U UA 67919 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до механізмів, що застосовуються як у промислових, так і в побутових вузлах, де необхідно перетворення поступального руху в обертальний у прямому та зворотному напрямках, переважно у двигунах внутрішнього згоряння. Відомий кривошипно-шатунний механізм, який містить поршень, опорний елемент, пов'язаний з шатуном за допомогою поршневого пальця (Патент РФ № F02B75/32, F02B75/18). У зв'язку з конструктивними особливостями вектор сили, який діє вздовж осі поршня в момент займання горючої суміші, спрямований по прямій, яка складає з поздовжньою віссю шатуна кут близько 3-9°, що знижує коефіцієнт корисної дії двигуна внутрішнього згорання. Крім того, в традиційному кривошипно-шатунному механізмі в трьох зчленуваннях передбачено застосування підшипників кочення і ковзання. Недолік, таке технічне рішення ускладнює процес виготовлення та експлуатації кривошипношатунного механізму, оскільки вимагає високої точності виробничого обладнання при виготовленні деталей вузла. Найбільш близьким технічним рішенням є кривошипно-шатунний механізм, який містить поршень, опорний елемент, пов'язаний з шатуном за допомогою поршневого пальця (Патент Великобритании № 1043021, кл. F16J 1/16, опубл. 1965), при цьому шатун встановлений на центральному циліндричному поясі пальця. Недоліками аналога є мала надійність, тому, що постійно існує можливість виникнення перекосів під час точково-лінійної передачі зусилля в поршневому пальці у момент робочого ходу, відносно високі масогабаритні показники, потрібно підвищення надійності, довговічності, простоти виготовлення та збирання механізму. В основу корисної моделі поставлено задачу удосконалення відомого кривошипношатунного механізму, в якому введенням нових конструктивних елементів та їх взаємним розташуванням досягається можливість саморегуляції системи в результаті можливості перерозподілу реактивних знакоперемінних навантажень на тіло кочення, виключення перекосів, прийом передачі енергії в момент робочого ходу, і за рахунок цього простота виготовлення, збирання, надійності та довговічності механізму. Поставлена задача вирішується тим, що у відомому кривошипно-шатунному механізмі, який має колінчастий вал, шатун, поршень, палець, згідно з корисною моделлю, встановлений додатковий, співвісний палець, при цьому пальці установлено торцевими поверхнями (одна до одної), з утворенням простору, в якому розміщене введене тіло кочення, з можливістю переміщення та фіксації в осьовому напрямку. Суть корисної моделі пояснюється кресленням, на якому зображено пропонований механізм в поперечному розрізі, що містить поршень 1, пов'язаний з шатуном 2 за допомогою введених пальців 3, тіла кочення 4. Шатун 2 орієнтується щодо колінчастого вала 5 за допомогою тіла кочення 4. Ступінь пристосування визначається зазором між тілом кочення, і введеними пальцями 3, за рахунок осьового переміщення і фіксації їх в заданому положенні за допомогою стопорних кілець 6. Відбувається саморегуляція системи в результаті перерозподілу реактивних навантажень за рахунок самовизначення тіла кочення 4 в просторі, створеному конічними торцевими поверхнями введених пальців 3. Другі кінці пальців 3 мають різьбову зовнішню, конічно-торцеву поверхню, в якій розташовується тіло кочення 4. Пристрій працює наступним чином. Під час робочого процесу відбувається передача зусилля займистою сумішшю, що перетворює поступальний рух поршня 1 в обертальний колінчастого вала 5, через опорні конічні поверхні введених пальців 3, тіло кочення 4, шатуна 2. Ступінь саморегуляції механізму визначається величиною зазору між тілом кочення 4 та опорно-конічними пальцями 3. Фактично відбувається постійна кільцева передача зусилля в роз'ємному елементі з тілом кочення 4 у момент робочого ходу, в порівнянні з аналогами, де виникають перекоси поршня по відношенню до пальців, отже і нестабільність робочого процесу за рахунок точково-лінійної передачі зусилля, що є перевагою. Виконання такого механізму дозволяє зменшити ширину головки шатуна 2 і значно поліпшити умови роботи кривошипно-шатунного механізму за рахунок виключення дії на нього згинаючих навантажень, які виникають в процесі виготовлення і складання системи. Таким чином, технічне рішення може бути використане у двигунах внутрішнього згоряння, а також у компресорах і т. п., забезпечуючи стабільність режиму роботи за рахунок саморегуляції, надійності та довговічності механізму. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 1 UA 67919 U Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень, палець, який відрізняється тим, що має встановлений додатковий, співвісний палець, при цьому пальці установлено торцевими поверхнями (одна до одної), з утворенням простору, в якому розміщене введене тіло кочення, з можливістю переміщення та фіксації в осьовому напрямку. Комп’ютерна верстка Л.Литвиненко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюCrank mechanism
Автори англійськоюZiborov Kyrylo Albertovych, Vanzha Hennadii Kupriianovych, Bas Kostiantyn Markovych, Krivda Vitaliy Valeriyovich, Zakharenko Vitalii Oleksandrovych
Назва патенту російськоюКривошипно-шатунный механизм
Автори російськоюЗиборов Кирилл Альбертович, Ванжа Геннадий Куприянович, Бас Константин Маркович, Кривда Виталий Валериевич, Захаренко Виталий Александрович
МПК / Мітки
МПК: F16C 7/00
Мітки: механізм, кривошипно-шатунний
Код посилання
<a href="https://ua.patents.su/4-67919-krivoshipno-shatunnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Кривошипно-шатунний механізм</a>
Кривошипно-шатунний механізм
Номер патенту: 63967
Опубліковано: 16.02.2004
Автор: Пеннінг Клаус
МПК: G01F 3/02
Мітки: механізм, кривошипно-шатунний
Формула / Реферат:
1. Кривошипно-шатунний механізм для чутливого до температури пристрою, зокрема для сильфонного газометра, що містить- обертову навколо осі деталь (1),- принаймні один елемент (2) кривошипно-шатунного механізму, з'єднаний з обертовою деталлю (1) з можливістю сумісного обертання разом з нею,- принаймні один поворотний важіль (4), з'єднаний з можливістю повороту з елементом (2) кривошипно-шатунного механізму,-...
Кривошипно-шатунний механізм
Номер патенту: 67840
Опубліковано: 12.03.2012
Автори: Бас Костянтин Маркович, Крівда Віталій Валерійович, Ванжа Геннадій Купріянович, Зіборов Кирило Альбертович
МПК: F16C 7/00
Мітки: кривошипно-шатунний, механізм
Формула / Реферат:
Кривошипно-шатунний механізм, що включає колінчастий вал, шатун, поршень, який відрізняється тим, що головка шатуна містить опорну вставку, що має з торців контактні конічні отвори, в поршні співвісно вставці встановлені жорстко закріплені дві півосі, і звернені вставки аналогічними контактними конічними поверхнями, між якими розміщені тіла кочення, а другі кінці півосей мають отвори, і закріплені з можливістю переміщення їх в осьовому...
Кривошипно-шатунний механізм
Номер патенту: 16288
Опубліковано: 15.08.2006
Автори: Столяров Владислав Іванович, Столярова Тетяна Владиславівна, Ткаченко Наталя Владиславівна
МПК: F01B 1/00
Мітки: кривошипно-шатунний, механізм
Формула / Реферат:
Кривошипно-шатунний механізм з поршневою системою, що містить кривошипний вал, виконаний з двох співвісних секцій на підшипниках, розташованих в корпусі, який відрізняється тим, що кривошипи секцій з’єднані однією із осей хрестовини через підшипники кочення, яка під кутом перетинає нерухому вісь вала в центрі хрестовини, а друга вісь хрестовини на підшипниках кочення посаджена в гнізда зворотно-поворотної рами, опорна вісь якої посаджена на...
Кривошипно – шатунний механізм поршневої машини
Номер патенту: 643
Опубліковано: 16.10.2000
Автор: Підгорний Олександр Сергійович
МПК: F01B 9/04
Мітки: механізм, поршневої, шатунний, кривошипно, машини
Формула / Реферат:
Кривошипно-шатунний механізм поршневої машини, який включає корпус з циліндром, поршень, розташований у циліндрі, жорстко зв'язану з корпусом циліндричну шестерню з внутрішнім зубчатим вінцем, перший кривошипний вал, встановлений в корпусі, першу шестерню-сателіт з зовнішнім зубчатим вінцем, встановлену з можливістю зачеплення з внутрішнім зубчатим вінцем циліндричної шестерні і сполучену шарнірно з першим кривошипним валом, а також перший...
Кривошипно-шатунний механізм поршневої машини
Номер патенту: 50789
Опубліковано: 15.11.2002
Автор: Підгорний Олександр Сергійович
МПК: F01B 9/04
Мітки: кривошипно-шатунний, поршневої, механізм, машини
Формула / Реферат:
Кривошипно-шатунний механізм поршневої машини, що включає корпус з циліндром, поршень, розташований у циліндрі з можливістю зворотно-поступального руху, шатун, верхньою головкою шарнірно з’єднаний з поршнем, кривошипний вал, установлений в корпусі, жорстко зв'язану з корпусом циліндричну шестірню з внутрішнім зубчатим вінцем і шестірню-сателіт з зовнішнім зубчатим вінцем, зчепленим з внутрішнім зубчатим вінцем циліндричної шестірні з...