Система стабілізації швидкості літака
Номер патенту: 106163
Опубліковано: 25.04.2016
Автори: Барашева Світлана Іванівна, Симонов Володимир Федорович

Формула / Реферат
Система стабілізації швидкості літака, що містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, вихід якого з'єднаний з літаком, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до другого входу другого суматора, другий вихід літака підключений до акселерометра, а третій вихід літака підключений до датчика швидкості, яка відрізняється тим, що в неї введений блок парирування відмов, перший вхід якого з'єднаний з виходом акселерометра, другий вхід якого з'єднаний з виходом датчика швидкості, а вихід блока парирування відмов підключений до другого входа першого суматора.
Текст
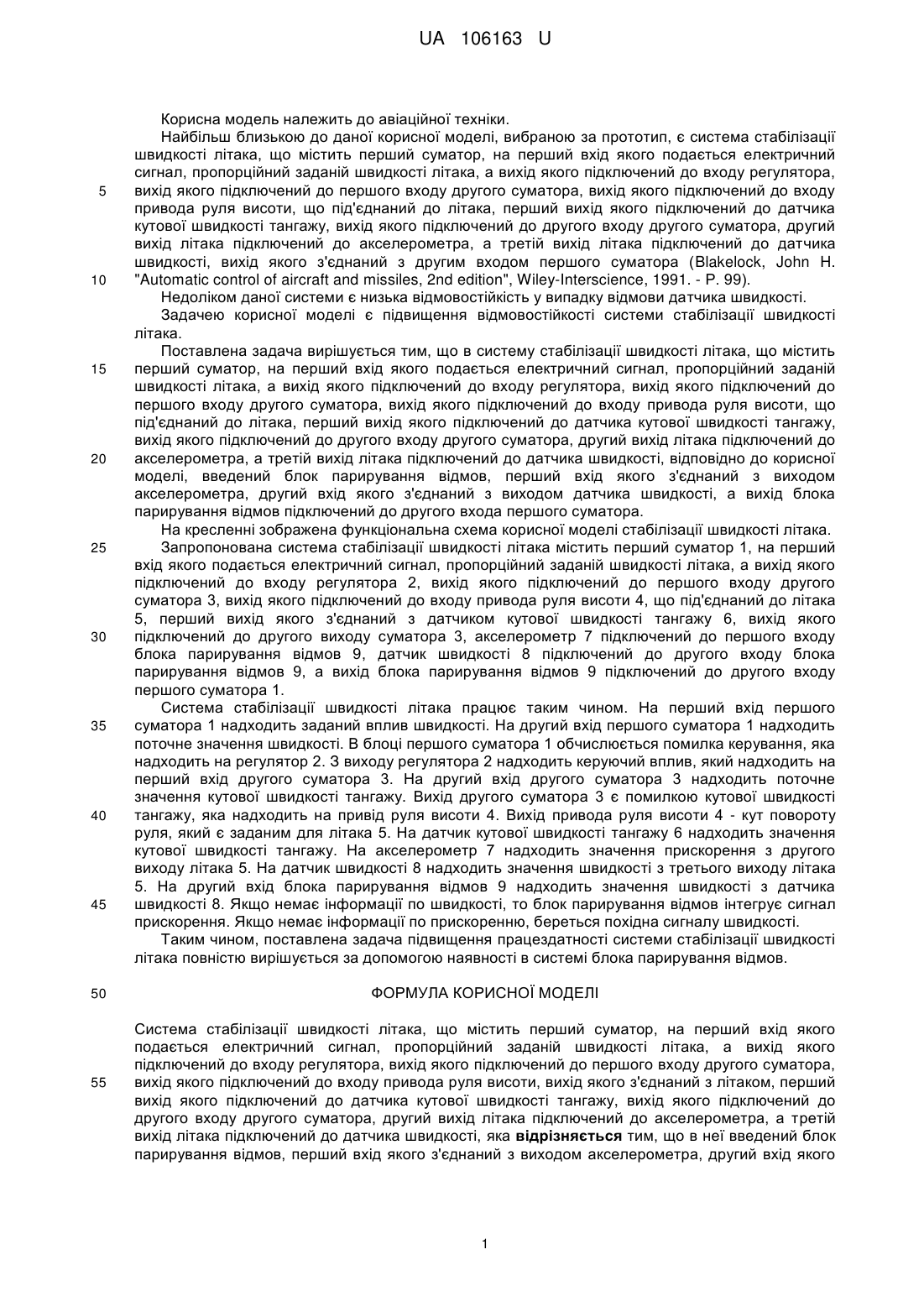
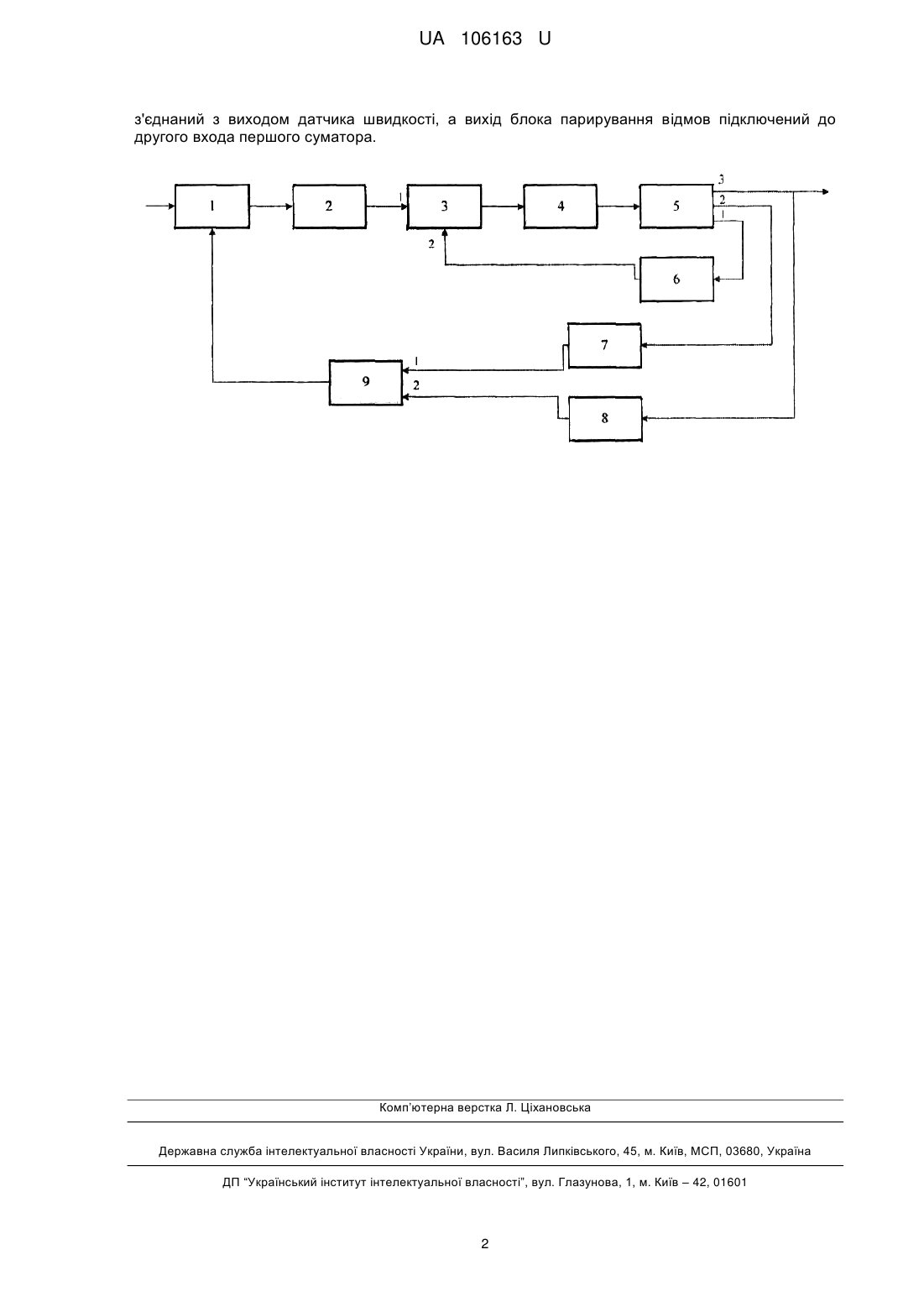
Реферат: Система стабілізації швидкості літака містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, вихід якого з'єднаний з літаком, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до другого входу другого суматора, другий вихід літака підключений до акселерометра, а третій вихід літака підключений до датчика швидкості. В неї введений блок парирування відмов, перший вхід якого з'єднаний з виходом акселерометра, другий вхід якого з'єднаний з виходом датчика швидкості, а вихід блока парирування відмов підключений до другого входа першого суматора. UA 106163 U (12) UA 106163 U UA 106163 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до авіаційної техніки. Найбільш близькою до даної корисної моделі, вибраною за прототип, є система стабілізації швидкості літака, що містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, що під'єднаний до літака, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до другого входу другого суматора, другий вихід літака підключений до акселерометра, а третій вихід літака підключений до датчика швидкості, вихід якого з'єднаний з другим входом першого суматора (Blakelock, John H. "Automatic control of aircraft and missiles, 2nd edition", Wiley-Interscience, 1991. - Р. 99). Недоліком даної системи є низька відмовостійкість у випадку відмови датчика швидкості. Задачею корисної моделі є підвищення відмовостійкості системи стабілізації швидкості літака. Поставлена задача вирішується тим, що в систему стабілізації швидкості літака, що містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, що під'єднаний до літака, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до другого входу другого суматора, другий вихід літака підключений до акселерометра, а третій вихід літака підключений до датчика швидкості, відповідно до корисної моделі, введений блок парирування відмов, перший вхід якого з'єднаний з виходом акселерометра, другий вхід якого з'єднаний з виходом датчика швидкості, а вихід блока парирування відмов підключений до другого входа першого суматора. На кресленні зображена функціональна схема корисної моделі стабілізації швидкості літака. Запропонована система стабілізації швидкості літака містить перший суматор 1, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора 2, вихід якого підключений до першого входу другого суматора 3, вихід якого підключений до входу привода руля висоти 4, що під'єднаний до літака 5, перший вихід якого з'єднаний з датчиком кутової швидкості тангажу 6, вихід якого підключений до другого виходу суматора 3, акселерометр 7 підключений до першого входу блока парирування відмов 9, датчик швидкості 8 підключений до другого входу блока парирування відмов 9, а вихід блока парирування відмов 9 підключений до другого входу першого суматора 1. Система стабілізації швидкості літака працює таким чином. На перший вхід першого суматора 1 надходить заданий вплив швидкості. На другий вхід першого суматора 1 надходить поточне значення швидкості. В блоці першого суматора 1 обчислюється помилка керування, яка надходить на регулятор 2. З виходу регулятора 2 надходить керуючий вплив, який надходить на перший вхід другого суматора 3. На другий вхід другого суматора 3 надходить поточне значення кутової швидкості тангажу. Вихід другого суматора 3 є помилкою кутової швидкості тангажу, яка надходить на привід руля висоти 4. Вихід привода руля висоти 4 - кут повороту руля, який є заданим для літака 5. На датчик кутової швидкості тангажу 6 надходить значення кутової швидкості тангажу. На акселерометр 7 надходить значення прискорення з другого виходу літака 5. На датчик швидкості 8 надходить значення швидкості з третього виходу літака 5. На другий вхід блока парирування відмов 9 надходить значення швидкості з датчика швидкості 8. Якщо немає інформації по швидкості, то блок парирування відмов інтегрує сигнал прискорення. Якщо немає інформації по прискоренню, береться похідна сигналу швидкості. Таким чином, поставлена задача підвищення працездатності системи стабілізації швидкості літака повністю вирішується за допомогою наявності в системі блока парирування відмов. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Система стабілізації швидкості літака, що містить перший суматор, на перший вхід якого подається електричний сигнал, пропорційний заданій швидкості літака, а вихід якого підключений до входу регулятора, вихід якого підключений до першого входу другого суматора, вихід якого підключений до входу привода руля висоти, вихід якого з'єднаний з літаком, перший вихід якого підключений до датчика кутової швидкості тангажу, вихід якого підключений до другого входу другого суматора, другий вихід літака підключений до акселерометра, а третій вихід літака підключений до датчика швидкості, яка відрізняється тим, що в неї введений блок парирування відмов, перший вхід якого з'єднаний з виходом акселерометра, другий вхід якого 1 UA 106163 U з'єднаний з виходом датчика швидкості, а вихід блока парирування відмов підключений до другого входа першого суматора. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюRate stabilization system
Автори англійськоюSymonov Volodymyr Fedorovych, Barasheva Svitlana Ivanivna
Назва патенту російськоюСистема стабилизации скорости самолета
Автори російськоюСимонов Владмир Федорович, Барашева Светлана Ивановна
МПК / Мітки
МПК: B64C 19/00, G01S 13/02, G01P 3/44
Мітки: літака, система, стабілізації, швидкості
Код посилання
<a href="https://ua.patents.su/4-106163-sistema-stabilizaci-shvidkosti-litaka.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації швидкості літака</a>
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Бойко Євгенія Анатоліївна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: відмовостійка, літального, система, безпілотного, апарата, кутової, стабілізації
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Паніна Алла Володимирівна, Симонов Володимир Федорович
МПК: G05D 1/03
Мітки: система, безпілотного, апарата, літального, стабілізації
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Відмовостійка система кутової стабілізації космічного апарата

Номер патенту: 94309
Опубліковано: 10.11.2014
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Варганич Олексій Сергійович
МПК: B64G 1/28
Мітки: стабілізації, кутової, система, космічного, апарата, відмовостійка
Формула / Реферат:
Відмовостійка система кутової стабілізації космічного апарата, що містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, яка відрізняється...
Пристрій для вимірювання швидкості зльоту літака
Номер патенту: 64257
Опубліковано: 16.02.2004
Автори: Зеленков Олександр Аврамович, Синєглазов Віктор Михайлович, Соченко Петро Степанович, Пазюк Олексій Вячеславович
Мітки: пристрій, швидкості, літака, зльоту, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання швидкості зльоту літака, що містить генератор високої частоти, акустичний випромінювач та акустичний приймач, який відрізняється тим, що в нього введені вимірювач частоти відбитого ультразвуку, вимірювач температури, обчислювач швидкості зльоту літака та індикатор, причому вихід генератора високої частоти підключений до входу акустичного випромінювача та до першого входу обчислювача швидкості зльоту літака,...
Пристрій вимірювання швидкості зльоту літака
Номер патенту: 55998
Опубліковано: 15.04.2003
Автори: Соченко Петро Степанович, Синєглазов Віктор Михайлович, Зеленков Олександр Аврамович
МПК: G01P 3/64, G01S 15/00
Мітки: літака, швидкості, пристрій, вимірювання, зльоту
Формула / Реферат:
1. Пристрій вимірювання швидкості зльоту літака, що містить перший та другий акустичні ехолоти, який відрізняється тим, що в нього введені модуль вводу цифрових даних та модуль визначення швидкості, причому третій вихід модуля вводу цифрових даних підключений до керуючих входів першого та другого акустичних ехолотів та до четвертого входу модуля визначення швидкості, виходи акустичних ехолотів з'єднані, відповідно, з першим та другим входами...
Попередній патент: Спосіб виготовлення ствола стрілецької зброї
Наступний патент: Спосіб вирощування монокристалів парателуриту
Випадковий патент: Ревізійний люк, що закривається, для повноскладального будівництва