Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Бойко Євгенія Анатоліївна, Симонов Володимир Федорович

Формула / Реферат
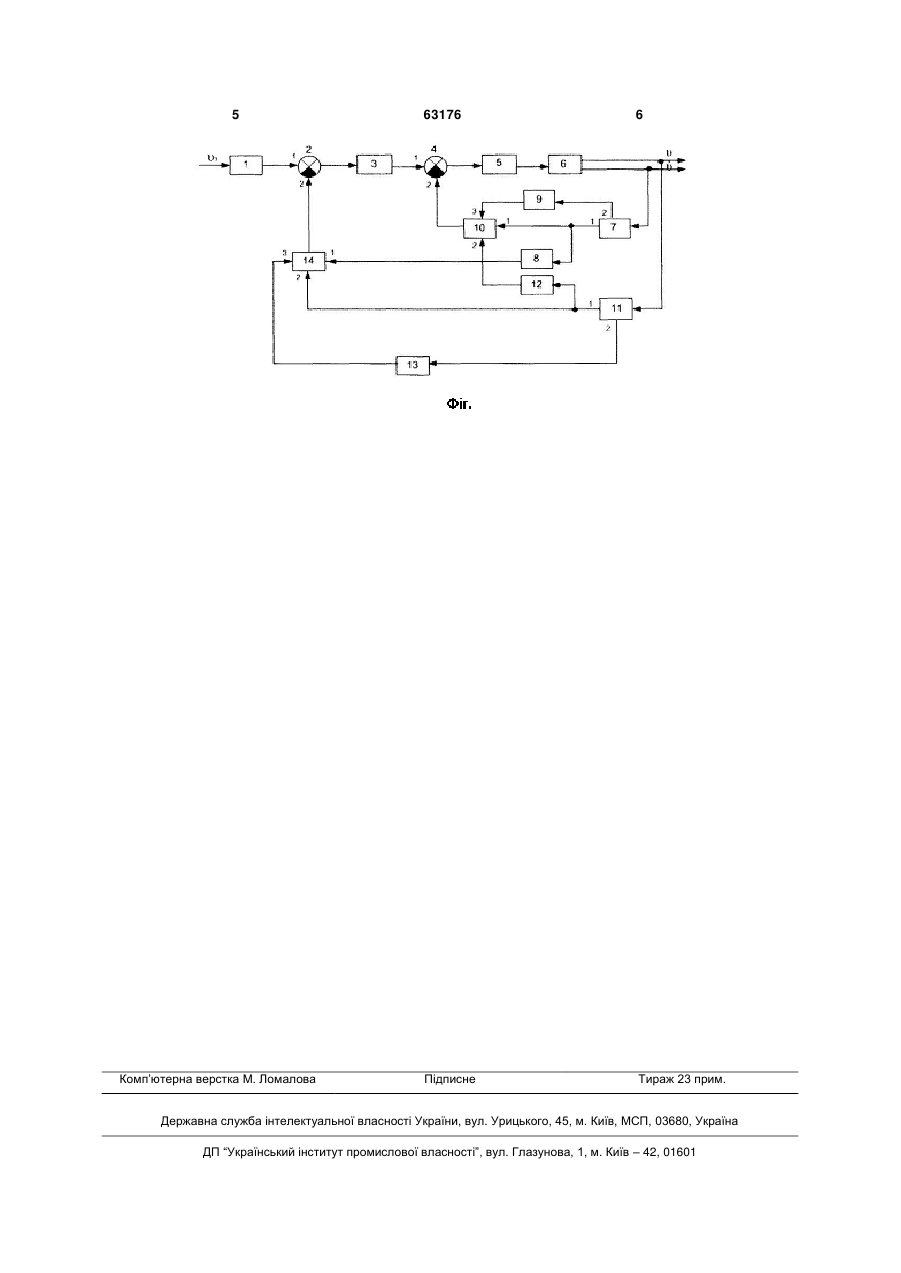
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової швидкості, яка відрізняється тим, що введено інтегратор, вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із першим входом першого електронного ключа, другий вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом першого суматора, диференціатор, вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом другого електронного ключа, перший вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із другим входом другого суматора, перший індикатор відмови, вхід якого з'єднаний з другим виходом датчика кута тангажа, а вихід - з третім входом першого електронного ключа, другий індикатор відмови, вхід якого з'єднаний з другим виходом датчика кутової швидкості, а вихід - з третім входом другого електронного ключа.
Текст
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та 3 виходом датчика кута, а вихід - із другим входом другого електронного ключа, перший вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із другим входом другого суматора, перший індикатор відмови, вхід якого з'єднаний з другим виходом датчика кута, а вихід - з третім входом першого електронного ключа, другий індикатор відмови, вхід якого з'єднаний з другим виходом датчика кутової швидкості, а вихід - з третім входом другого електронного ключа. Завдяки цьому за наявності відмов одного з датчиків, за допомогою ключа та інтегратора чи диференціатора, на суматори надходять необхідні сигнали з датчиків, що призводить до забезпечення працездатності та нормального функціонування системи стабілізації в процесі польоту навіть за наявності відмов. Сутність корисної моделі пояснюється кресленнями, де на Фіг. зображена блок-схема запропонованої відмовостійкої системи кутової стабілізації безпілотного літального апарата. Відмовостійка система кутової стабілізації безпілотного літального апарата містить: послідовно з'єднані задавальний пристрій 1, перший суматор 2, перший вхід якого з'єднаний з виходом задавального пристрою 1, а вихід - з регулятором 3. Вихід регулятора 3 з'єднаний з першим входом другого суматора 4. Вихід другого суматора 4 з'єднаний з входом сервопривода 5. Вихід сервопривода 5 з'єднаний з входом безпілотного літального апарата 6, кутове положення якого вимірюється за допомогою датчика кута тангажа 11 і датчика кутової швидкості 7, перший вихід якого з'єднано з другим входом другого суматора 4 через перший вхід другого електронного ключа 10 та з першим входом першого електронного ключа 14 через інтегратор 8, а другий вихід - з третім входом другого електронного ключа 10 через другий індикатор відмови 9. Датчик кута тангажа 11 має два виходи: перший - з'єднаний з другим входом першого суматора 2 через другий вхід першого електронного ключа 14 та з другим входом другого електронного ключа 10 через диференціатор 12, другий - з'єднаний з третім входом першого електронного ключа 14 через перший індикатор відмови 13. Відмовостійка система кутової стабілізації безпілотного літального апарата працює таким чином: під час польоту на вхід задавального пристрою 1 подається сигнал про задане значення кута тангажа з , сигнал, перетворений в напругу передається на перший вхід першого суматора 2, а на його другий вхід подається сигнал з датчика кута тангажа 11, який порівнюється з сигналом з задавального пристрою 1. Різниця сигналів поступає на регулятор 3, який служить в якості коректуючого пристрою. Далі сигнал поступає на перший вхід другого суматора 4, який також приймає сигнал про кутову швидкість тангажа . Суматор 4 63176 4 видає сигнал на сервопривід 5, який перетворює сигнал управління у відповідні переміщення органів керування, які подаються на безпілотний літальний апарат 6. Сигнал про кутову швидкість тангажа передається з датчика кутової швидкості 7 через перший вихід на інтегратор 8 та другий електронний ключ 10, а також через другий вихід на другий індикатор відмови 9. При наявності відмов датчика кутової швидкості 7 на виході індикатора відмови 9 буде „0" (якщо відмов немає - „1"). Відмови в даних датчиках можуть бути: знеструмлення, обрив обмоток, коротке замикання, затирання кінематики, руйнування підшипників, розбалансування гіровузлів, порушення контактів в роз'ємах. В колі живлення для перевірки працездатності необхідне виконання умови: Iспож. min Iспож Iспож. max де Iспож. min - мінімальний струм споживання, необхідний для функціонування датчиків; Iспож - дійсний струм споживання датчиків; Iспож. max - максимальний струм споживання, необхідний для функціонування датчиків. Тобто, на індикатори відмов надходять значення струму з датчиків, вони порівнюються зі струмом споживання, якщо виконується умова 1, то датчики не мають відмов. Сигнал з індикатора відмов 9 надходить на другий електронний ключ 10, якщо на його вхід приходить "1", то ключ залишається в такому ж стані, тобто на суматор 4 надходять сигнали саме з датчика кутової швидкості 7, а якщо – "0", то ключ замикає інше коло, тобто сигнал надходить з диференціатора 12, який перетворює сигнал (значення кута тангажа) з датчика кута тангажа 11 в сигнал з датчика кутової швидкості 7, тобто в (значення кутової швидкості). Відповідно, якщо відмовив датчик кута тангажа 11, то на виході першого індикатора відмови 13 буде "0", цей сигнал надходить на перший електронний ключ 14, який замикає нове коло. На перший суматор 2 буде надходити сигнал з інтегратора 8, який перетворює сигнал з датчика кутової швидкості 7, в сигнал . Якщо ж датчик кута тангажа 11 не має відмов, то на виході першого індикатора відмови 13 буде "1", тобто перший електронний ключ 14 залишиться в початковому положенні і на другий вхід першого суматора 2 буде надходити сигнал з датчика кута тангажа 11. Таким чином поставлена задача повністю вирішується. Корисна модель дозволяє забезпечити відмовостійкість системи кутової стабілізації безпілотного літального апарата при наявності відмови одного з датчиків. 5 Комп’ютерна верстка М. Ломалова 63176 6 Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAngular stabilization fail-safe system for pilotess aircraft
Автори англійськоюSymonov Volodymyr Fedorovych, Boiko Yevheniia Anatoliivna
Назва патенту російськоюОтказоустойчивая система угловой стабилизации беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Бойко Евгения Анатольевна
МПК / Мітки
МПК: G05D 1/03
Мітки: літального, безпілотного, стабілізації, кутової, система, відмовостійка, апарата
Код посилання
<a href="https://ua.patents.su/3-63176-vidmovostijjka-sistema-kutovo-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Відмовостійка система кутової стабілізації безпілотного літального апарата</a>
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Бандура Іван Миколайович, Амеліна Ірина Вікторівна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: літального, адаптивна, система, кутової, стабілізації, безпілотного, апарата
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Відмовостійка система керування боковим рухом безпілотного літального апарата

Номер патенту: 35088
Опубліковано: 26.08.2008
Автори: Симонов Володимир Федорович, Амеліна Ірина Вікторівна, Бандура Іван Миколайович
МПК: G05D 1/03, B64C 13/00
Мітки: рухом, апарата, боковим, безпілотного, літального, керування, система, відмовостійка
Формула / Реферат:
Відмовостійка система керування боковим рухом безпілотного літального апарата, що містить перший датчик кутової швидкості рискання, перший та другий суматори, перший та другий підсилювачі, привід керма напрямку, датчик положення керма напрямку, перший датчик кутової швидкості крену, привід елеронів, обчислювач значень кута крену, перший, другий датчики тиску, датчик положення елеронів, блок віднімання, формувач значень сигналу кута ковзання,...
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Амелін Сергій Вікторович, Симонов Володимир Федорович, Антошик Вікторія Миколаївна
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, система, стабілізації, безпілотного, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Пристрій для кутової стабілізації безпілотного літального апарата

Номер патенту: 29176
Опубліковано: 10.01.2008
Автори: Амеліна Ірина Вікторівна, Субота Анатолій Максимович, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: пристрій, стабілізації, літального, кутової, безпілотного, апарата
Формула / Реферат:
Пристрій для кутової стабілізації безпілотного літального апарата, що містить датчик відхилення кутового положення літального апарата від програмного значення, перетворювач аналог-код, форсуючу ланку, перший перетворювач код-аналог, рульовий привід органів керування, перший, другий, третій та четвертий блоки інтегрування, перший, другий та третій інвертори, перший і другий блоки виділення знака сигналу, блок визначення функції зсуву та...
Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Литвиненко Денис Володимирович, Симонов Володимир Федорович, Паніна Алла Володимирівна
МПК: G05D 1/03
Мітки: стабілізації, апарата, літального, безпілотного, система
Формула / Реферат:
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків...
Попередній патент: Формувач періодичної послідовності імпульсів з перенастроюваною тривалістю, періодом і фіксованою паузою, рівною двом тактам
Наступний патент: Формувач послідовності імпульсів типу меандр з перенастроюваною тривалістю
Випадковий патент: Спосіб підвищення насіннєвої продуктивності озимого ріпаку