Відмовостійка система кутової стабілізації космічного апарата
Номер патенту: 94309
Опубліковано: 10.11.2014
Автори: Субота Анатолій Максимович, Симонов Володимир Федорович, Варганич Олексій Сергійович

Формула / Реферат
Відмовостійка система кутової стабілізації космічного апарата, що містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, яка відрізняється тим, що введено інтегратор, вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із першим входом першого електронного ключа, другий вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом першого суматора, диференціатор, вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом другого електронного ключа, перший вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із другим входом другого суматора, перший індикатор відмови, вхід якого з'єднаний з другим виходом датчика кута тангажа, а вихід - з третім входом першого електронного ключа, другий індикатор відмови, вхід якого з'єднаний з другим виходом датчика кутової швидкості, а вихід - з третім входом другого електронного клону.
Текст
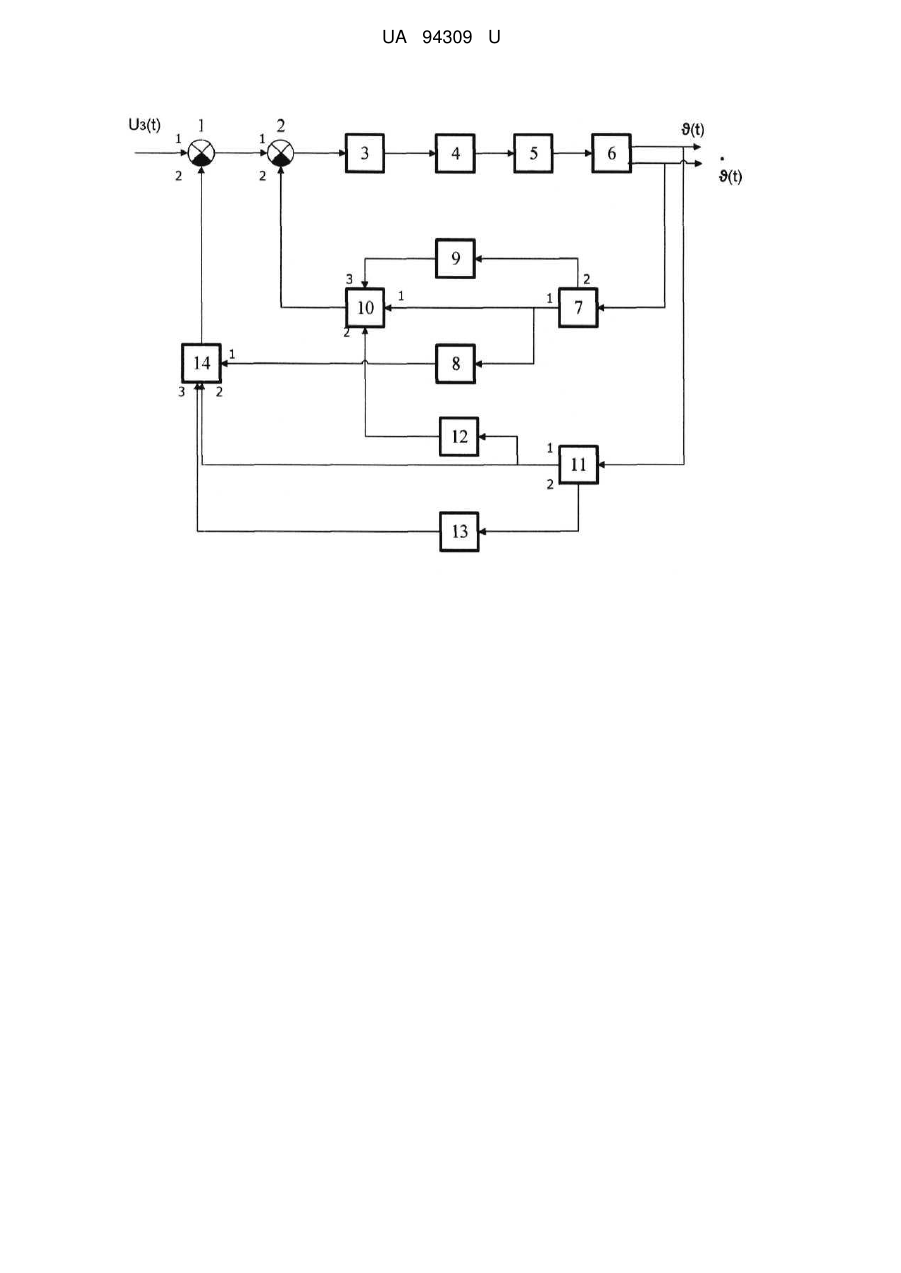
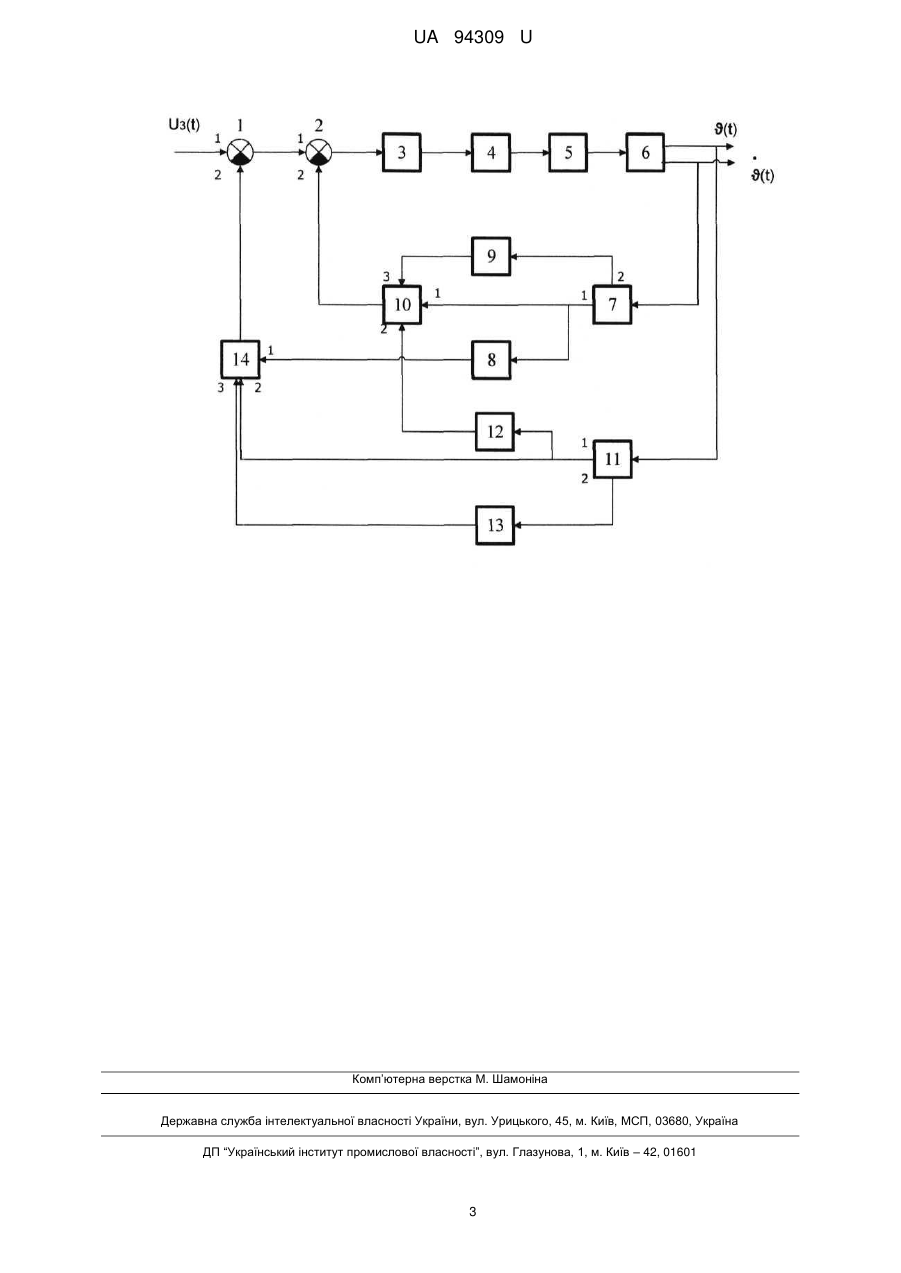
Реферат: UA 94309 U UA 94309 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі космонавтики і може бути використана для системи кутової стабілізації космічних апаратів (КА), у яких як виконавчі органи використовуються маховики. Відома система кутової стабілізації космічних апаратів [Патент України № 4526, МПК 7 B64G1/28, опублікований 17.01.2005, Бюл. № 1], яка містить послідовно з'єднані електропривід, редуктор і маховик, а також другий електропривід, другий редуктор, диференціал, перший та другий вимірювачі кутової швидкості, перший та другий масштабні перетворювачі, перший та другий суматори, перший та другий підсилювачі, мікропроцесор. Недоліком відомої системи є те, що система стає непрацездатною при відмові датчиків кута та кутової швидкості КА, та складність реалізації. Відома система кутової стабілізації КА взята як прототип (Каргу Л.И., Системы угловой стабилизации космических аппаратов. - Μ: Машиностроение, 1980. - стр. 48), яка містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, виходи яких з'єднані з другими входами першого та другого суматорів відповідно. Недоліком такої системи є те, що система стає непрацездатною при відмові датчиків кута та кутової швидкості КА. Задачею корисної моделі є забезпечення відмовостійкості системи стабілізації та змога отримання інформації про кут та кутову швидкість КА при відмові одного з датчиків. Рішення поставленої задачі досягається тим, що в систему кутової стабілізації безпілотного літального апарата, що містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, згідно з корисною моделлю, введені додатково інтегратор, вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із першим входом першого електронного ключа, другий вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом першого суматора, диференціатор, вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом другого електронного ключа, перший вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із другим входом другого суматора, перший індикатор відмови, вхід якого з'єднаний з другим виходом датчика кута тангажа, а вихід - з третім входом першого електронного ключа, другий індикатор відмови, вхід якого з'єднаний з другим виходом датчика кутової швидкості, а вихід - з третім входом другого електронного ключа. Завдяки цьому за наявності відмов одного з датчиків, за допомогою ключа та інтегратора чи диференціатора, на суматори надходять необхідні сигнали з датчиків, що призводить до забезпечення працездатності та нормального функціонування системи стабілізації в процесі польоту навіть за наявності відмов. Суть корисної моделі пояснюється кресленням, де зображена блок-схема запропонованої відмовостійкої системи кутової стабілізації космічного апарата. Відмовостійка система кутової стабілізації космічного апарата містить: перший суматор 1, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора 2, вихід якого з'єднаний з підсилювачем потужності 3, вихід якого з'єднаний з електроприводом 4, вихід якого з'єднаний з маховиком 5, який з'єднаний з космічним апаратом 6, з яким з'єднані датчик кута тангажа 11 та датчик кутової швидкості 7, інтегратор 8, вхід якого з'єднаний з першим виходом датчика кутової швидкості 7, а вихід - із першим входом першого електронного ключа 14, другий вхід якого з'єднаний з першим виходом датчика кута тангажа 11, а вихід - із другим входом першого суматора 1, диференціатор 12, вхід якого з'єднаний з першим виходом датчика кута тангажа 11, а вихід - із другим входом другого електронного ключа 10, перший вхід якого з'єднаний з першим виходом датчика кутової швидкості 7, а вихід із другим входом другого суматора 2, перший індикатор відмови 13, вхід якого з'єднаний з другим виходом датчика кута тангажа 11, а вихід - з третім входом першого електронного ключа 14, другий індикатор відмови 9, вхід якого з'єднаний з другим виходом датчика кутової швидкості 7, а вихід - з третім входом другого електронного ключа 10. Відмовостійка система кутової стабілізації космічного апарата працює таким чином: під час польоту на перший вхід першого суматора 1 подається задавальний сигнал U 3 про задане значення кута тангажа, сигнал, передається на перший вхід другого суматора 2, а на його другий вхід подається сигнал з датчика кута тангажа 11, який порівнюється з задавальним 1 UA 94309 U 5 10 сигналом. Різниця сигналів надходить на другий суматор і після віднімання сигналу з датчика кутової швидкості 7 подається на підсилювач потужності 3. Далі сигнал надходить на електропривід 4. Електропривід 4 видає сигнал на маховик 5, Далі з маховика 5 сигнал подається на космічний апарат 6. Сигнал про кутову швидкість тангажа передається з датчика кутової швидкості 7 через перший вихід на інтегратор 8 та другий електронний ключ 10, а також через другий вихід на другий індикатор відмови 9. При наявності відмов датчика кутової швидкості 7 на виході індикатора відмови 9 буде „0" (якщо відмов немає - „1"). Відмови в даних датчиках можуть бути: знеструмлення, обрив обмоток, коротке замикання, затирання кінематики, руйнування підшипників, розбалансування гідровузлів, порушення контактів в роз'ємах. В колі живлення для перевірки працездатності необхідне виконання умови: Ιспож.mіn Ιспож Ιспож.mах, 15 20 25 30 35 40 45 50 (1), де Ιспож.mіn - мінімальний струм споживання, необхідний для функціонування датчиків; Ιспож - дійсний струм споживання датчиків; Ιспож.mах - максимальний струм споживання, необхідний для функціонування датчиків. Тобто, на індикатори відмов надходять значення струму з датчиків, вони порівнюються зі струмом споживання, якщо виконується умова 1, то датчики не мають відмов. Сигнал з індикатора відмов 9 надходить на другий електронний ключ 10, якщо на його вхід приходить "1", то ключ залишається в такому ж стані, тобто на суматор 4 надходять сигнали саме з датчика кутової швидкості 7, а якщо -"0", то ключ замикає інше коло, тобто сигнал надходить з диференціатора 12, який перетворює сигнал (значення кута тангажа) з датчика кута тангажа 11 в сигнал з датчика кутової швидкості 7, тобто в (значення кутової швидкості). Відповідно, якщо відмовив датчик кута тангажа 11, то на виході першого індикатора відмови 13 буде "0", цей сигнал надходить на перший електронний ключ 14, який замикає нове коло. На перший суматор 1 буде надходити сигнал з інтегратора 8, який перетворює сигнал з датчика кутової швидкості 7, в сигнал . Якщо ж датчик кута тангажа 11 не має відмов, то на виході першого індикатора відмови 13 буде "1", тобто перший електронний ключ 14 залишиться в початковому положенні і на другий вхід першого суматора 1 буде надходити сигнал з датчика кута тангажа 11. Таким чином поставлена задача повністю вирішується. Корисна модель дозволяє забезпечити відмовостійкість системи кутової стабілізації космічного апарата при наявності відмови одного з датчиків. ФОРМУЛА КОРИСНОЇ МОДЕЛІ Відмовостійка система кутової стабілізації космічного апарата, що містить перший суматор, на перший вхід якого подається задавальний сигнал, а вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з підсилювачем потужності, вихід якого з'єднаний з електроприводом, вихід якого з'єднаний з маховиком, який з'єднаний з космічним апаратом, з яким з'єднані датчик кута тангажа та датчик кутової швидкості, яка відрізняється тим, що введено інтегратор, вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід із першим входом першого електронного ключа, другий вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом першого суматора, диференціатор, вхід якого з'єднаний з першим виходом датчика кута тангажа, а вихід - із другим входом другого електронного ключа, перший вхід якого з'єднаний з першим виходом датчика кутової швидкості, а вихід - із другим входом другого суматора, перший індикатор відмови, вхід якого з'єднаний з другим виходом датчика кута тангажа, а вихід - з третім входом першого електронного ключа, другий індикатор відмови, вхід якого з'єднаний з другим виходом датчика кутової швидкості, а вихід - з третім входом другого електронного клону. 2 UA 94309 U Комп’ютерна верстка М. Шамоніна Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 3
ДивитисяДодаткова інформація
Автори англійськоюSymonov Volodymyr Fedorovych, Subota Anatolii Maksymovych
Автори російськоюСимонов Владимир Федорович, Суббота Анатолий Максимович
МПК / Мітки
МПК: B64G 1/28
Мітки: космічного, кутової, стабілізації, відмовостійка, апарата, система
Код посилання
<a href="https://ua.patents.su/5-94309-vidmovostijjka-sistema-kutovo-stabilizaci-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Відмовостійка система кутової стабілізації космічного апарата</a>
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 63176
Опубліковано: 26.09.2011
Автори: Симонов Володимир Федорович, Бойко Євгенія Анатоліївна
МПК: G05D 1/03
Мітки: відмовостійка, безпілотного, кутової, стабілізації, апарата, система, літального
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, вихід якого з'єднаний з першим входом першого суматора, вихід якого з'єднаний з регулятором, вихід якого з'єднаний з першим входом другого суматора, вихід якого з'єднаний з сервоприводом, вихід якого з'єднаний з безпілотним літальним апаратом, дані про кут тангажа та кутову швидкість подаються на датчик кута тангажа та датчик кутової...
Відмовостійка система кутової стабілізації безпілотного літального апарата
Номер патенту: 75971
Опубліковано: 25.12.2012
Автори: Андрущенко Тетяна Миколаївна, Красножон Олександра Володимирівна, Кулік Анатолій Степанович, Субота Анатолій Максимович
МПК: G05G 7/00
Мітки: кутової, літального, апарата, безпілотного, система, відмовостійка, стабілізації
Формула / Реферат:
Відмовостійка система кутової стабілізації безпілотного літального апарата, що містить задавальний пристрій, суматори, регулятор, сервопривод, датчики кута тангажа і кутової швидкості, електронні ключі, індикатори відмови, диференціатор, інтегратор, яка відрізняється тим, що введено перший фільтр, вхід якого з'єднаний з першим входом датчика кута тангажа, вихід якого через диференціатор з'єднаний з першим входом другого електронного ключа,...
Адаптивна система кутової стабілізації безпілотного літального апарата
Номер патенту: 35826
Опубліковано: 10.10.2008
Автори: Амеліна Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, адаптивна, літального, стабілізації, система, безпілотного, кутової
Формула / Реферат:
Адаптивна система кутової стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, датчик кута, датчик кутової швидкості, обчислювач, до складу якого входять блок вибору нелінійності, перший і другий блоки керування, блок формування керуючих сигналів, другий суматор та перший електронний ключ та фільтр, до складу якого входять компаратор, тригер, елемент затримки, обмежувач рівня сигналу,...
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата

Номер патенту: 53727
Опубліковано: 11.10.2010
Автори: Богатюк Ольга Анатоліївна, Бандура Іван Миколайович, Кулік Анатолій Степанович
МПК: B64G 1/24
Мітки: система, апарата, кутової, швидкості, космічного, демпфірування, адаптивна, літального, початкової
Формула / Реферат:
Адаптивна система демпфірування початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, вихід якого через блок підсилювачів потужності з'єднаний з релейними виконавчими органами, яка відрізняється тим, що в неї введений блок визначення збурюючого моменту, вхід якого з'єднаний з виходом датчика кутової швидкості, а його вихід з'єднаний з другим...
Система гасіння початкової кутової швидкості космічного літального апарата
Номер патенту: 45064
Опубліковано: 26.10.2009
Автори: Педе Тетяна Юріївна, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: швидкості, апарата, гасіння, початкової, літального, кутової, космічного, система
Формула / Реферат:
Система гасіння початкової кутової швидкості космічного літального апарата, що містить датчик кутової швидкості, вихід якого приєднаний до першого входу блока керування, блок підсилювачів потужності, вихід якого приєднаний до релейних виконавчих органів, яка відрізняється тим, що до неї введені блок визначення імпульсу післядії та комутатор, вихід датчика кутової швидкості приєднаний до входу блока визначення імпульсу післядії, перший вихід...
Попередній патент: Система автоматичного управління літаком при заході на посадку
Наступний патент: Висувний дестабілізатор
Випадковий патент: Прозорий, ударостійкий полістирол на основі бутадієн-стирольних блокспівполімерів та спосіб його одержання