Система стабілізації безпілотного літального апарата
Номер патенту: 29140
Опубліковано: 10.01.2008
Автори: Паніна Алла Володимирівна, Симонов Володимир Федорович, Литвиненко Денис Володимирович
Формула / Реферат
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з другим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків множення з'єднані з першим та другим входами порівнювача, вихід якого з'єднаний з входом рульового приводу, виходи об'єкта керування з'єднані з датчиком кутової швидкості та датчиком кута, вихід якого з'єднаний з другим входом порівнювального пристрою, яка відрізняється тим, що в неї введені аналізатор виду аварійної ситуації, вхід якого з'єднаний з датчиком кута, порівнювальним пристроєм, пристроєм керування, інтегруючою ланкою та входом системи, вихід аналізатора виду аварійної ситуації з'єднаний з формувачем варіантів парирування, вихід якого з'єднаний з першим входом блока вибору процедури парирування, другий вхід якого через інформаційну шину з'єднаний з блоком алгоритмів парирування відмов, а виходи його з'єднані з ключами, резервна інтегруюча ланка, виходи якої з'єднані з першим входом блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості.
Текст
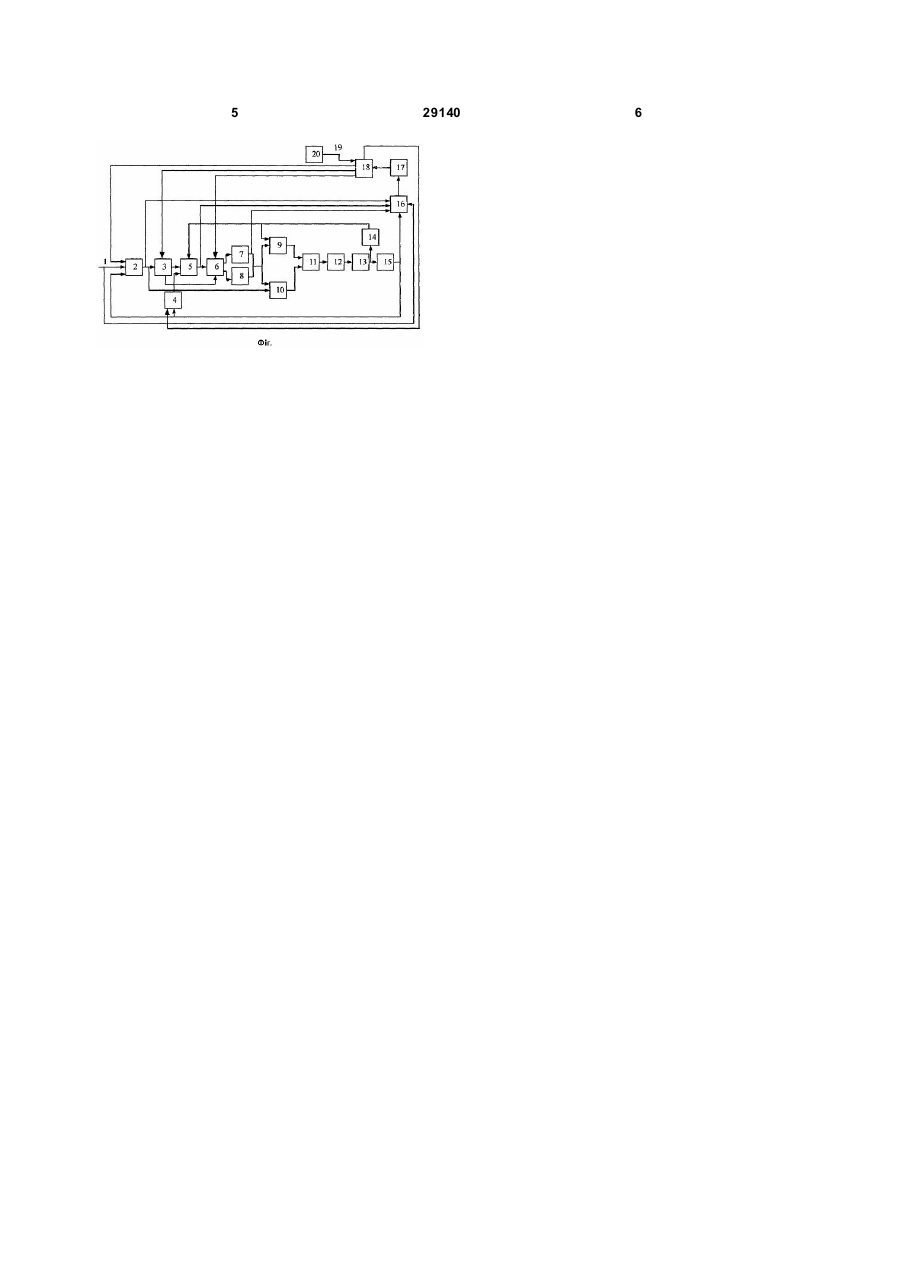
Система стабілізації безпілотного літального апарата, яка містить порівнювальний пристрій, що має електричний зв'язок з першим входом пристрою керування, вихід якого з'єднаний з інтегруючою ланкою, вихід якої з'єднаний з першим входом другого блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості, та з др угим входом першого блока множення, перший вхід якого з'єднаний з виходом порівнювального пристрою, виходи блоків 3 29140 керування, перший та другий блоки множення, інтегруючу ланку, порівнювач, рульовий привід згідно з корисною моделлю введені аналізатор виду а варійної ситуації, вхід якого з'єднаний з датчиком кута, порівнювальним пристроєм, пристроєм керування, інтегруючою ланкою та входом системи, вихід аналізатора виду аварійної ситуації з'єднаний з формувачем варіантів парирування, вихід якого з'єднаний з першим входом блока вибору процедури парирування, другий вхід якого через інформаційну шину з'єднаний з блоком алгоритмів парирування відмов, а виходи його з'єднані з ключами, резервна інтегруюча ланка, виходи якої з'єднані з першим входом блока множення, другий вхід якого з'єднаний з виходом датчика кутової швидкості. Запропоноване технічне рішення пояснюється кресленням, де на Фіг. відображена загальна функціональна схема побудови системи стабілізації безпілотного літального апарата. Система стабілізації безпілотного літального апарата містить: вхід системи 1, порівнювальний пристрій 2, що має електричний зв'язок через ключ 3 з першим входом аналізатора виду аварійної ситуації 16 і першим входом пристрою керування 5, вихід якого з'єднаний з другим входом аналізатора виду аварійної ситуації 16 і через ключ 6 з першою інтегруючою ланкою 7, сигнал з якої поступає на третій вхід аналізатора виду аварійної ситуації 16, та другою інтегруючою ланкою 8, виходи яких з'єднані з першим входом блока множення 9, другий вхід якого з'єднаний з виходом датчика кутової швидкості 14, та з другим входом блока множення 10, перший вхід якого з'єднаний з виходом порівнювального пристрою 2. Виходи блоків множення 9 та 10 з'єднані з першим та другим входами порівнювача 11,сигнал з виходу якого з'єднаний з входом рульового приводу 12, вихід якого з'єднаний з входом об'єкту керування 13, сигнал з виходу якого подається на датчик кутової швидкості 14 та датчик кута 15, з виходу якого сигнал подається на другий вхід порівнювального пристрою 2, на вхід якого подається задане значення кута курсу та на четвертий вхід аналізатора виду аварійної ситуації 16, вихід якого з'єднаний з формувачем варіантів парирування 17 з виходу якого сигнал подається на перший вхід блоку вибору процедури парирування 18, другий вхід якого через інформаційну шину 19 з'єднаний з блоком алгоритмів парирування відмов 20. З першого виходу блоку вибору процедури парирування 18 сигнал подається на третій вхід порівнювального пристрою 2, з другого виходу блоку вибору процедури парирування 18 сигнал подається на ключ 3, з третього виходу блоку вибору процедури парирування 18 сигнал подається на ключ 6, а з четвертого ви ходу блоку вибору процедури парирування 18 сигнал подається на ключ 4. Вихід датчика кута 15 через ключ 4 зв'язаний з другим входом пристрою керування 5, третій вхід якого з'єднаний з виходом датчика кутової швидкості 14. Система стабілізації безпілотного літального апарата за кутом курсу працює таким чином: під час польоту на перший вхід порівнювального 4 пристрою 2 подається сигнал про задане значення кута курсу, який порівнюється з сигналом дійсного значення кута курсу, що вимірюється датчиком куту 15 та подається на другий вхід порівнювального пристрою 2. Якщо між цими сигналами є різниця, то сигнал з виходу порівнювального пристрою 2 поступає на перший вхід пристрою керування 5 через ключ 3, який у випадку відмови пристрою керування 5 вимикає його з цепі і сигнал прямує через ключ 6 на першу інтегруючу ланку 7. Пристрій керування 5 також приймає сигнал про кутову швидкість курсу від датчика кутової швидкості 14. Ключ 6 у випадку відмови інтегруючої ланки 7 підключає до цепі резервну інтегруючу ланку 8. При цьому виходи інтегруючи х ланок 7 та 8 з'єднані з першим входом блока множення 9, другий вхід якого з'єднаний з виходом датчика кутової швидкості 14, та з другим входом блока множення 10, перший вхід якого з'єднаний з виходом порівнювального пристрою 2. Таким чином інтегруючі ланки 7 та 8 та блоки множення 9, 10 реалізують алгоритм підстроювання коефіцієнтів закону керування та забезпечують інваріантність систем керування до зміни параметрів об'єкта керування. Виходи блоків множення 9 та 10 з'єднані з першим та другим входами порівнювана 11, який видає сигнал на рульовий привід 12, вихід якого з'єднаний з входом об'єкта керування 13, виходами якого є кут курсу та кутова швидкість курсу, що вимірюються датчиком кута 15 та датчиком кутової швидкості 14 відповідно. З виходу датчика кута сигнал подається на другий вхід аналізатора виду аварійної ситуації 16, на перший вхід якого подається сигнал про задане значення кута курсу 1. Аналізатор виду аварійної ситуації 16 відповідно до сигналів, що поступають на третій, четвертий та п'ятий його входи з порівнювального пристрою 2, пристрою керування 5 та інтегруючої ланки 7 відповідно формує інформацію про їх те хнічний стан, а при наявності відмов - вид аварійної ситуації. Для кожного виду аварійної ситуації формувач варіантів парирування 17 формує множину всіх можливих варіантів парирування конкретної аварійної ситуації на основі існуючих резервних засобів. Інформація про існуючі резервні засоби поступає по інформаційній шині 19 з блоку алгоритмів парирування відмов 20. Оптимальна процедура парирування вибирається блоком вибору процедури парирування 18 і для обраного варіанту проводиться ре конфігурація системи: у випадку відмови порівнювального пристрою 2 сигнал датчика кута 15 перемиканням ключа 4 подається на третій вхід пристрою керування 5; у випадку відмови пристрою керування 5 ключ 3 перемикає сигнал на вхід першої інтегруючої ланки 7; при відмові першої інтегруючої ланки 7 ключ 6 підключає до цепі резервну інтегруючу ланку 8, Система, що пропонується має більш широкі функціональні можливості, оскільки забезпечується відмовостійкость порівнювального пристрою, пристрою керування та інтегруючої ланки. 5 29140 6
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for stabilization of pilotless aircraft
Автори англійськоюSymonov Volodymyr Fedorovych, Panina Alla Volodymyrivna, Lytvynenko Denys Volodymyrovych
Назва патенту російськоюСистема стабилизации беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Панина Алла Владимировна, Литвиненко Денис Владимирович
МПК / Мітки
МПК: G05D 1/03
Мітки: система, апарата, безпілотного, стабілізації, літального
Код посилання
<a href="https://ua.patents.su/3-29140-sistema-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Величко Надія Вікторівна
МПК: B64C 13/00, G05D 1/03
Мітки: апарата, система, літального, стабілізації, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система стабілізації безпілотного літального апарата

Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Амелін Сергій Вікторович, Антошик Вікторія Миколаївна, Симонов Володимир Федорович
МПК: G05D 1/03, B64C 13/00
Мітки: безпілотного, система, апарата, стабілізації, літального
Формула / Реферат:
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.2. Система стабілізації безпілотного літального...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Дигало Оксана Миколаївна, Кулік Анатолій Степанович, Цехмейстер Олена Олексіївна, Лазоркін Юрій Юрійович, Бандура Іван Миколайович
МПК: B64D 31/00
Мітки: система, апарата, установкою, керування, літального, двигуновою
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Система демпфірування кутових швидкостей космічного літального апарата

Номер патенту: 26160
Опубліковано: 10.09.2007
Автори: Колесников Геннадій Викторович, Бандура Іван Миколайович
МПК: B64G 1/24
Мітки: апарата, швидкостей, космічного, кутових, демпфірування, літального, система
Формула / Реферат:
Система демпфірування кутових швидкостей космічного літального апарата, що містить датчик подовжньої кутової швидкості, датчики першої та другої поперечних кутових швидкостей, блок керування виконавчими органами подовжнього каналу, блоки керування виконавчими органами першого і другого поперечних каналів, виконавчі органи подовжнього, першого та другого поперечних каналів, входи яких з'єднані з виходами відповідних блоків керування, між...
Спосіб випробування безпілотного літального апарата
Номер патенту: 74890
Опубліковано: 15.02.2006
Автори: Коростельов Олег Петрович, Шепелєв Юрій Іванович, Кузьмін В'ячеслав Павлович, Яковенко Петро Олексійович, Семенов Леонід Антонович, Доценко Борис Іванович, Любарець Андрій Анатолійович
МПК: F42B 15/01
Мітки: безпілотного, випробування, апарата, спосіб, літального
Формула / Реферат:
Спосіб випробування безпілотного літального апарата (ЛА), що включає задання координат цілі, визначення поточних координат ЛА, оцінку відносних поточних координат ЛА-ціль, пуск ЛА у фіксованій точці простору, керування ЛА, наприклад, за методом пропорційного зближення, який відрізняється тим, що поточні координати ЛА визначають за допомогою радіонавігаційної системи супутникової навігації, додатково визначають поточні значення проекцій...
Попередній патент: Наручна джойстикова клавіатура
Наступний патент: Склад швидкісного пасажирського електропоїзда
Випадковий патент: Спосіб виплавки сталі