Датчик вібрацій
Номер патенту: 109094
Опубліковано: 10.08.2016
Формула / Реферат
Датчик вібрацій, що містить постійний циліндричний магніт та дві циліндричні пружини, який відрізняється тим, що розташовано додаткові дві циліндричні пружини, постійний магніт розташований між першою парою ферозондів, перші вихідні обмотки яких увімкнені за диференціальною схемою, містить другу пару ферозондів, перші вихідні обмотки яких також увімкнені за диференціальною схемою, причому обидві пари ферозондів розташовані одна відносно одної на відстані, що дорівнює половині довжини постійного магніту, а кінці вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано, кожний ферозонд обладнано другою вихідною обмоткою, причому другі вихідні обмотки відповідно першої та другої пар ферозондів увімкнено за градієнтною схемою, а початок та кінець других вихідних обмоток ферозондів, розміщених з одного боку постійного магніту, об'єднано.
Текст
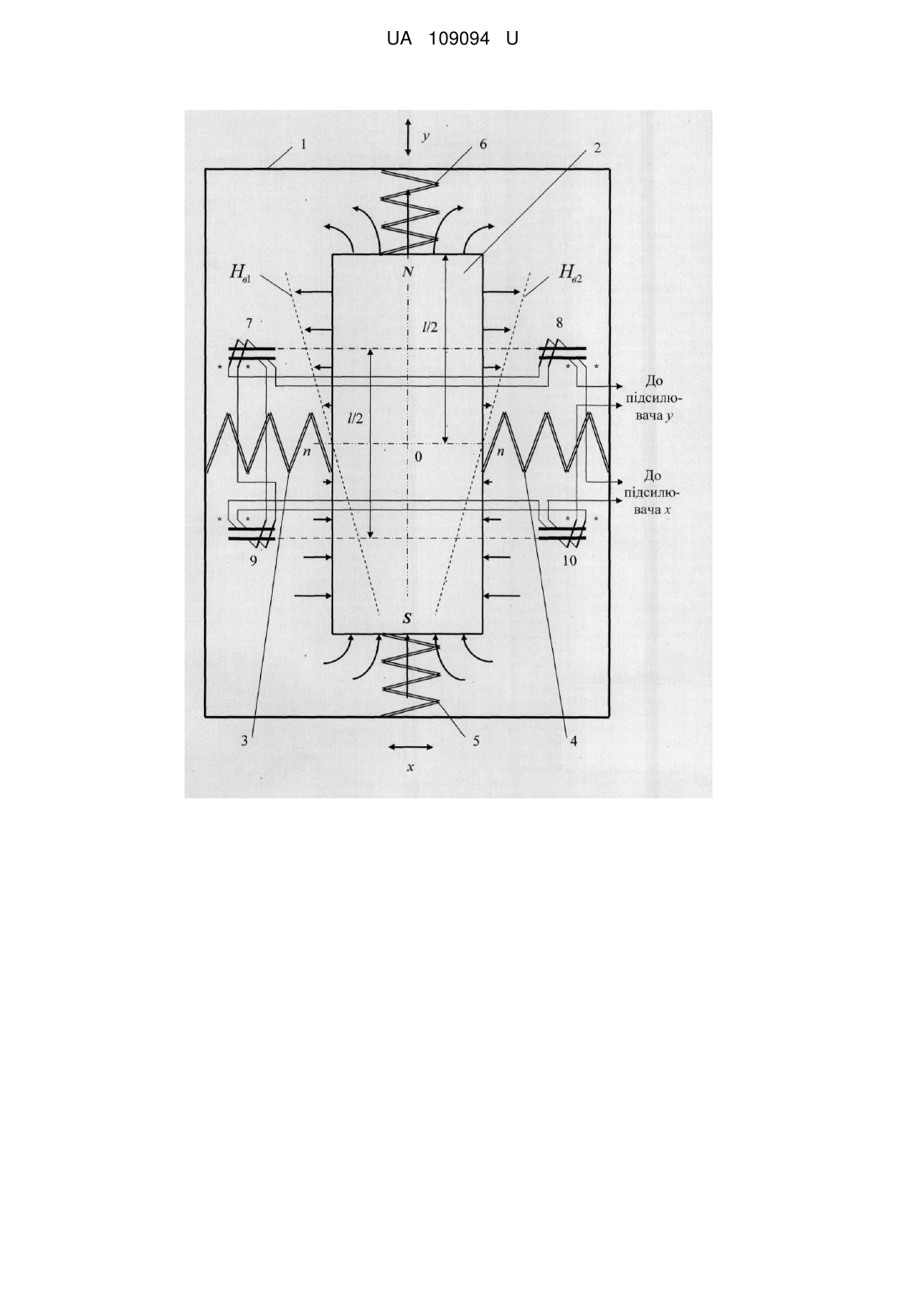
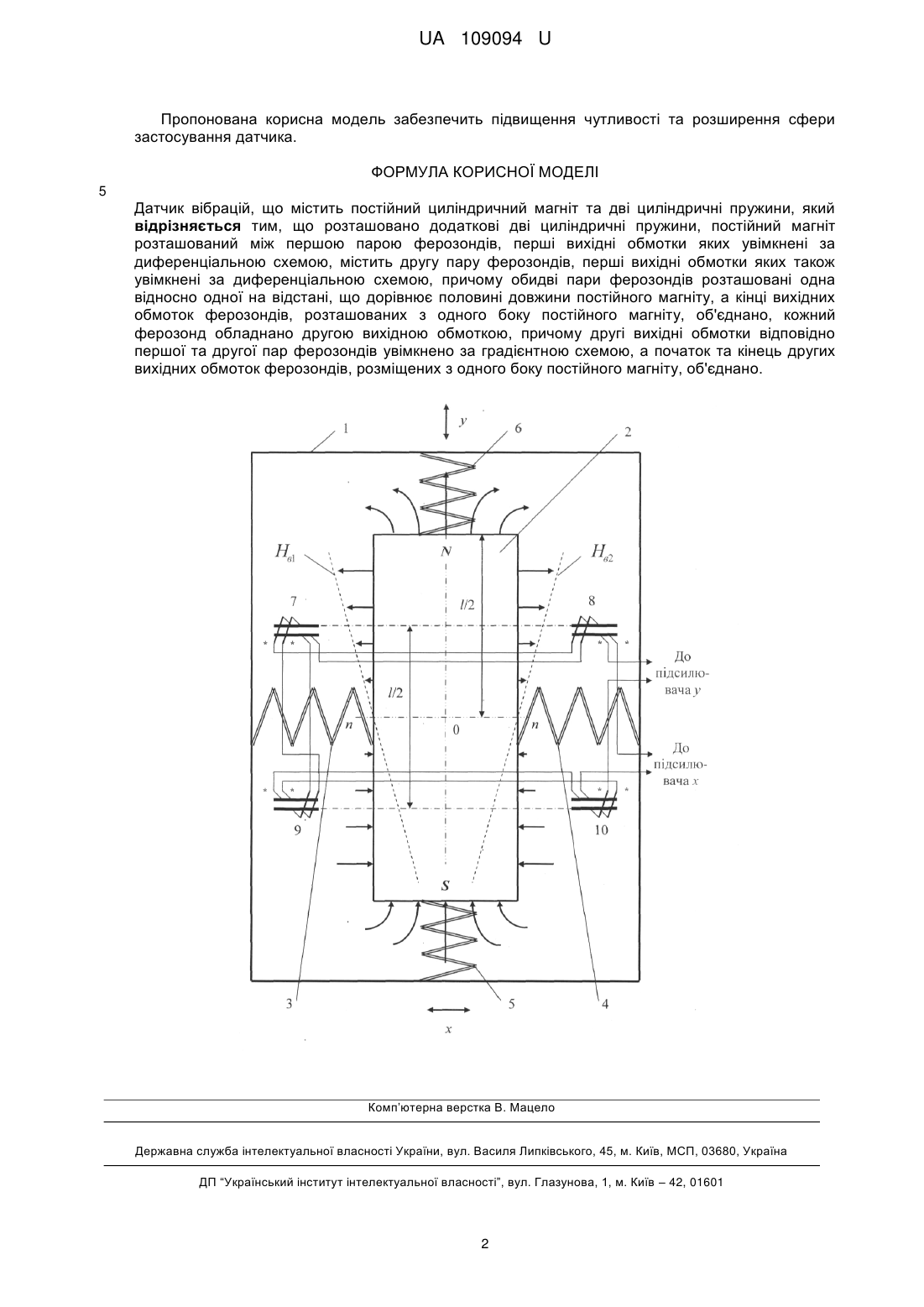
Реферат: Датчик вібрацій містить постійний циліндричний магніт та дві циліндричні пружини. Також розташовано додаткові дві циліндричні пружини, постійний магніт розташований між першою парою ферозондів, перші вихідні обмотки яких увімкнені за диференціальною схемою, містить другу пару ферозондів, перші вихідні обмотки яких також увімкнені за диференціальною схемою. При цьому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині довжини постійного магніту, а кінці вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано. Кожний ферозонд обладнано другою вихідною обмоткою. UA 109094 U (54) ДАТЧИК ВІБРАЦІЙ UA 109094 U UA 109094 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання вібропереміщень у двох координатах. Відомо датчик вібрацій, що містить постійний циліндричний магніт, котушку та дві циліндричні пружини [див. Электромагнитные датчики механических величин / Н.Ю. Конюхов, Ф.М. Медников, М.Л. Нечаевский - М.: Машиностроение, 1987. - С. 69-70, рис. 29]. Цей датчик вибрано за найближчий аналог Недоліком відомого датчика вібрацій є те, що він не забезпечує достатньої чутливості та вимірювання вібропереміщень у двох координатах. В основу корисної моделі поставлено задачу вдосконалення датчика вібрацій шляхом того, що розташовано додаткові дві циліндричні пружини, постійний магніт розташований між першою парою ферозондів, перші вихідні обмотки яких увімкнені за диференціальною схемою, містить другу пару ферозондів, перші вихідні обмотки яких також увімкнені за диференціальною схемою, причому обидві пари ферозондів розташовані одна відносно іншої на відстані, що дорівнює половині довжини постійного. магніту, а кінці вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано, кожний ферозонд обладнано другою вихідною обмоткою, причому другі вихідні обмотки відповідно першої та другої пар ферозондів увімкнено за градієнтною схемою, а початок та кінець других вихідних обмоток ферозондів, розміщених з одного боку постійного магнітну, об'єднано, що забезпечить підвищення чутливості та вимірювання вібропереміщень у двох координатах. Поставлена задача вирішується тим, що у датчику вібрацій, що містить постійний циліндричний магніт та дві циліндричні пружини, згідно з корисною моделлю, розташовано додаткові дві циліндричні пружини, постійний магніт розташований між першою парою ферозондів, перші вихідні обмотки яких увімкнені за диференціальною схемою, містить другу пару ферозондів, перші вихідні обмотки яких також увімкнені за диференціальною схемою, причому обидві пари ферозондів розташовані одна відносно одної на відстані, що дорівнює половині довжини постійного магніту, а кінці вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано, кожний ферозонд обладнано другою вихідною обмоткою, причому другі вихідні обмотки відповідно першої та другої пар ферозондів увімкнено за градієнтною схемою, а початок та кінець других вихідних обмоток ферозондів, розміщених з одного боку постійного магнітну, об'єднано. Суть корисної моделі пояснюється кресленням, де зображено датчик вібрацій, що містить корпус 1, постійний магніт 2, прикріплений до циліндричних пружин 3-6, першу пару 7, 8 ферозондів, перші вихідні обмотки яких з'єднано за диференціальною схемою, другу пару 9, 10 ферозондів, перші вихідні обмотки яких також з'єднано за диференціальною схемою, причому перша 7, 8 та друга 9, 10 пари ферозондів розташовані одна відносно одної на відстані, що дорівнює половині / 2 довжини постійного магніту 2, кінці перших вихідних обмоток ферозондів 7, 9 об'єднані, другі вихідні обмотки відповідно першої 7, 8 та другої 9, 10 пар ферозондів увімкнено за градієнтною схемою, а початок та кінець других вихідних обмоток ферозондів 7, 9 об'єднано, при цьому початки перших вихідних обмоток ферозондів 8, 10 підключено до підсилювача у, початок другої вихідної обмотки ферозонда 8 та кінець другої вихідної обмотки ферозонда 10 - до підсилювача х. Датчик вібрацій працює наступним чином. При відсутності вібрацій постійний магніт 2 під дією відштовхуючих сил з боку циліндричних пружин 3-6 знаходиться у середньому положенні у напрямках осей n-n, N-S датчика, що співпадають з напрямками вимірювання параметрів вібрації, при цьому перша 7, 8 та друга 9, 10 пари ферозондів розташовані симетрично відносно осей n-n, N-S як у середині піддіапазонів лінійності вздовж осі N-S вертикальних складових напруженостей Нв1 та Нв2 зовнішнього поля постійного магніту 2, так і у середині піддіапазонів лінійності вздовж осі n-n цих же вертикальних складових напруженостей поля. На перших та других вихідних обмотках кожного ферозонда 7-10 будуть однакові за величиною сигнали, тому на вході підсилювачів х та у сумарні сигнали будуть дорівнювати нулю. При дії вібрацій корпус 1 разом з ферозондами 7-10 зміщується відносно постійного магніту 2 по осі n-n на відстань, пропорційну х, а по осі N-S - пропорційну у. У цьому разі на виходах першої та другої обмоток кожного ферозонда 7-10 з'являться однакові за величиною прирости сигналів, при цьому сумарний сигнал з перших вихідних обмоток ферозондів 7-10, який пропорційний у та подається до підсилювача у, буде вчетверо перевищувати величину приросту сигналу одного з ферозондів, а сумарний сигнал з других вихідних обмоток ферозондів 7-10, який пропорційний х, та подається до підсилювача х, буде також учетверо перевищувати величину приросту сигналу одного з ферозондів. Належний вибір зазорів між постійним магнітом та ферозондами дозволить підвищити лінійність метрологічної характеристики. 1 UA 109094 U Пропонована корисна модель забезпечить підвищення чутливості та розширення сфери застосування датчика. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Датчик вібрацій, що містить постійний циліндричний магніт та дві циліндричні пружини, який відрізняється тим, що розташовано додаткові дві циліндричні пружини, постійний магніт розташований між першою парою ферозондів, перші вихідні обмотки яких увімкнені за диференціальною схемою, містить другу пару ферозондів, перші вихідні обмотки яких також увімкнені за диференціальною схемою, причому обидві пари ферозондів розташовані одна відносно одної на відстані, що дорівнює половині довжини постійного магніту, а кінці вихідних обмоток ферозондів, розташованих з одного боку постійного магніту, об'єднано, кожний ферозонд обладнано другою вихідною обмоткою, причому другі вихідні обмотки відповідно першої та другої пар ферозондів увімкнено за градієнтною схемою, а початок та кінець других вихідних обмоток ферозондів, розміщених з одного боку постійного магніту, об'єднано. Комп’ютерна верстка В. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01H 1/12, G01H 11/02, G01B 7/00
Код посилання
<a href="https://ua.patents.su/4-109094-datchik-vibracijj.html" target="_blank" rel="follow" title="База патентів України">Датчик вібрацій</a>
Датчик вібрацій
Номер патенту: 74863
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як котушку застосовано пару ферозондів, розташованих з протилежних боків постійного циліндричного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою.
Датчик вібрацій
Номер патенту: 82633
Опубліковано: 12.08.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
Датчик вібрацій, що містить постійний циліндричний магніт, котушку, додаткові два циліндричні постійні магніти, направлені протилежними полюсами на полюси основного постійного циліндричного магніту, який відрізняється тим, що застосовано пару ферозондів, розташованих з протилежних боків постійного циліндричного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою.
Датчик вібрацій
Номер патенту: 99088
Опубліковано: 25.05.2015
Автори: Смірний Михайло Федорович, Полив'янчук Андрій Павлович, Марченко Андрій Петрович
МПК: G01H 11/02, G01M 7/02
Формула / Реферат:
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та дві циліндричні пружини, пару ферозондів, розташованих з протилежних боків постійного циліндричного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою, який відрізняється тим, що як ферозонди застосовано кільцевий багатоелементний ферозондовий перетворювач.
Датчик вібрацій
Номер патенту: 77856
Опубліковано: 25.02.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
Датчик вібрацій, що містить корпус, постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як постійний циліндричний магніт застосовано постійний стрижневий прямокутний магніт, прикріплений боковими гранями через чотири пружини до корпусу, а як котушку застосовано дві пари ферозондів, розташованих у взаємно перпендикулярних площинах з боку бокових граней постійного стрижневого прямокутного магніту, при...
Датчик

Номер патенту: 81902
Опубліковано: 10.07.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, додатковий постійний магніт, розміщений з боку від основного постійного магніту та з'єднаний з ним немагнітними перемичками, пару градієнтометрів, розташованих на осі симетрії постійних магнітів з боку їхніх полюсів, при цьому вихідні обмотки градієнтометрів увімкнені за диференціальною схемою, який відрізняється тим, що додатково містить першу пару ферозондів, вихідні обмотки яких увімкнені за...
Попередній патент: Абразивне самозагострювальне кільцеве свердло
Наступний патент: Безконтактний вимірювач крутного моменту і частоти обертання вала
Випадковий патент: Диференціальний індуктивний датчик зусиль