Диференціальний індуктивний датчик зусиль
Формула / Реферат
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташовані симетрично відносно прохідного якоря з протилежного боку на осях, зміщені від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, який відрізняється тим, що підсилювально-перетворювальні канали, які з'єднані з перехресно розташованими відносно прохідного якоря магнітопроводами з котушками, підключені до входу диференціального підсилювача через суматор.
Текст
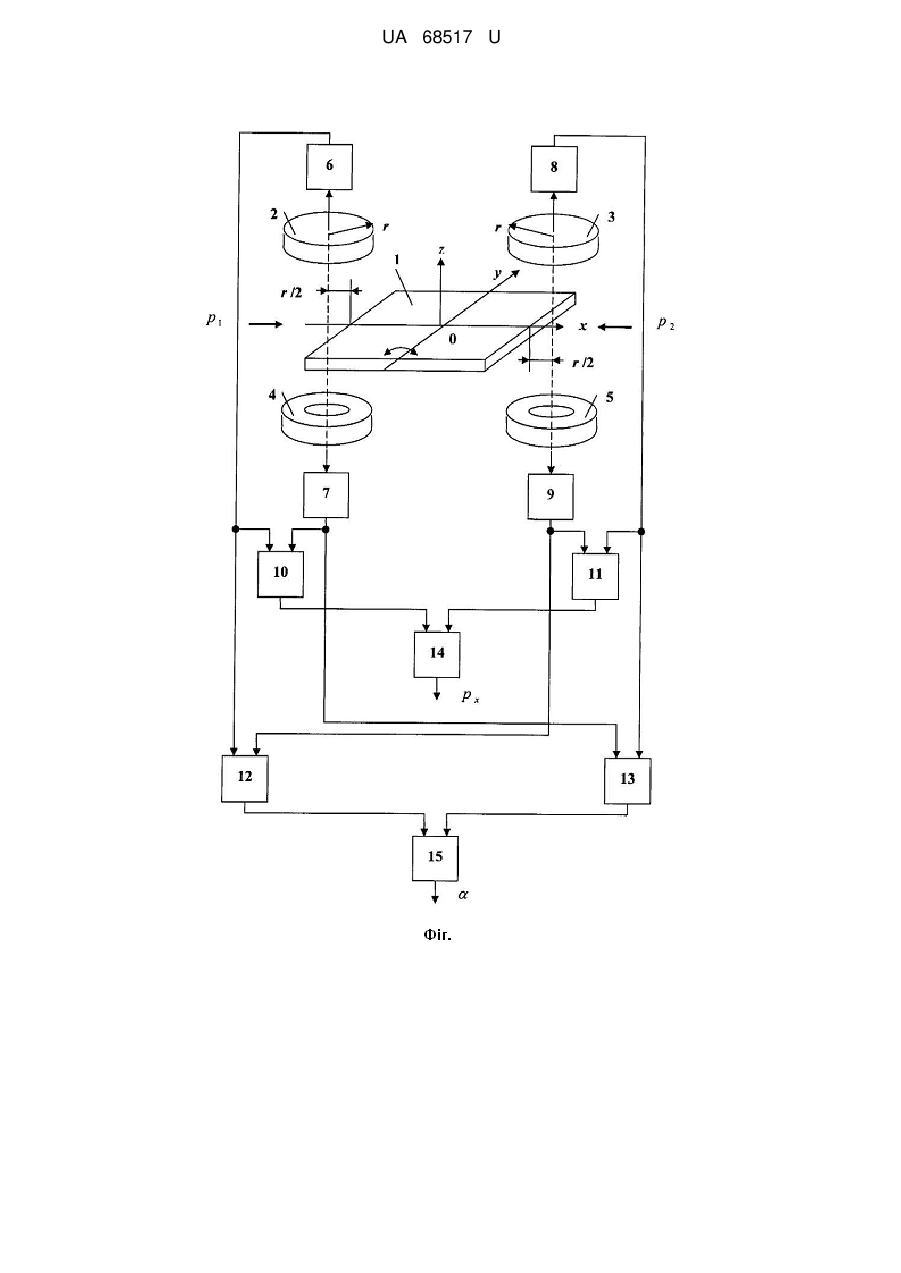
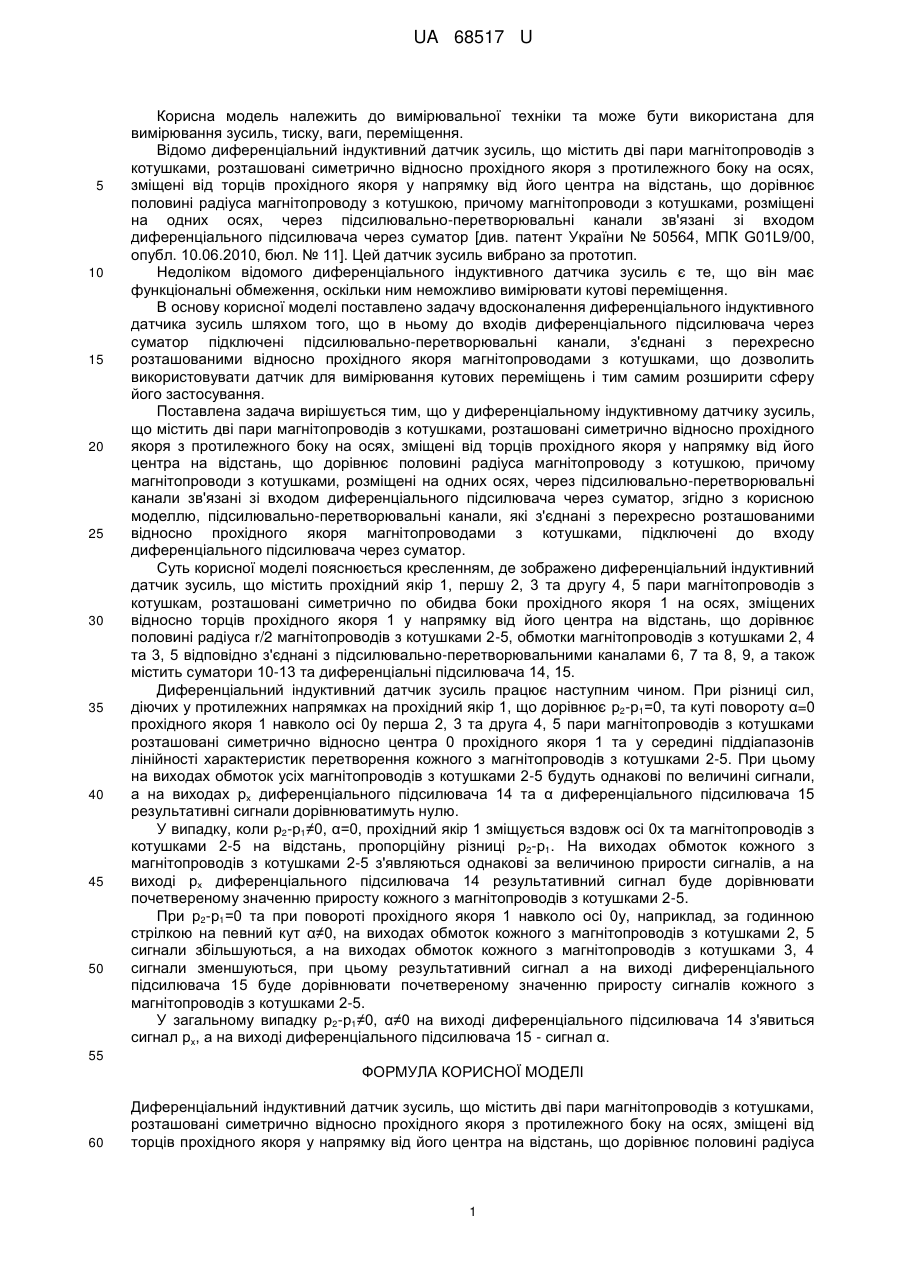
Реферат: UA 68517 U UA 68517 U 5 10 15 20 25 30 35 40 45 50 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання зусиль, тиску, ваги, переміщення. Відомо диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташовані симетрично відносно прохідного якоря з протилежного боку на осях, зміщені від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор [див. патент України № 50564, МПК G01L9/00, опубл. 10.06.2010, бюл. № 11]. Цей датчик зусиль вибрано за прототип. Недоліком відомого диференціального індуктивного датчика зусиль є те, що він має функціональні обмеження, оскільки ним неможливо вимірювати кутові переміщення. В основу корисної моделі поставлено задачу вдосконалення диференціального індуктивного датчика зусиль шляхом того, що в ньому до входів диференціального підсилювача через суматор підключені підсилювально-перетворювальні канали, з'єднані з перехресно розташованими відносно прохідного якоря магнітопроводами з котушками, що дозволить використовувати датчик для вимірювання кутових переміщень і тим самим розширити сферу його застосування. Поставлена задача вирішується тим, що у диференціальному індуктивному датчику зусиль, що містить дві пари магнітопроводів з котушками, розташовані симетрично відносно прохідного якоря з протилежного боку на осях, зміщені від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, згідно з корисною моделлю, підсилювально-перетворювальні канали, які з'єднані з перехресно розташованими відносно прохідного якоря магнітопроводами з котушками, підключені до входу диференціального підсилювача через суматор. Суть корисної моделі пояснюється кресленням, де зображено диференціальний індуктивний датчик зусиль, що містить прохідний якір 1, першу 2, 3 та другу 4, 5 пари магнітопроводів з котушкам, розташовані симетрично по обидва боки прохідного якоря 1 на осях, зміщених відносно торців прохідного якоря 1 у напрямку від його центра на відстань, що дорівнює половині радіуса r/2 магнітопроводів з котушками 2-5, обмотки магнітопроводів з котушками 2, 4 та 3, 5 відповідно з'єднані з підсилювально-перетворювальними каналами 6, 7 та 8, 9, а також містить суматори 10-13 та диференціальні підсилювача 14, 15. Диференціальний індуктивний датчик зусиль працює наступним чином. При різниці сил, діючих у протилежних напрямках на прохідний якір 1, що дорівнює р2-р1=0, та куті повороту α=0 прохідного якоря 1 навколо осі 0y перша 2, 3 та друга 4, 5 пари магнітопроводів з котушками розташовані симетрично відносно центра 0 прохідного якоря 1 та у середині піддіапазонів лінійності характеристик перетворення кожного з магнітопроводів з котушками 2-5. При цьому на виходах обмоток усіх магнітопроводів з котушками 2-5 будуть однакові по величині сигнали, а на виходах рх диференціального підсилювача 14 та α диференціального підсилювача 15 результативні сигнали дорівнюватимуть нулю. У випадку, коли р2-р1≠0, α=0, прохідний якір 1 зміщується вздовж осі 0x та магнітопроводів з котушками 2-5 на відстань, пропорційну різниці р2-р1. На виходах обмоток кожного з магнітопроводів з котушками 2-5 з'являються однакові за величиною прирости сигналів, а на виході рх диференціального підсилювача 14 результативний сигнал буде дорівнювати почетвереному значенню приросту кожного з магнітопроводів з котушками 2-5. При р2-р1=0 та при повороті прохідного якоря 1 навколо осі 0y, наприклад, за годинною стрілкою на певний кут α≠0, на виходах обмоток кожного з магнітопроводів з котушками 2, 5 сигнали збільшуються, а на виходах обмоток кожного з магнітопроводів з котушками 3, 4 сигнали зменшуються, при цьому результативний сигнал а на виході диференціального підсилювача 15 буде дорівнювати почетвереному значенню приросту сигналів кожного з магнітопроводів з котушками 2-5. У загальному випадку р2-р1≠0, α≠0 на виході диференціального підсилювача 14 з'явиться сигнал рх, а на виході диференціального підсилювача 15 - сигнал α. 55 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 60 Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташовані симетрично відносно прохідного якоря з протилежного боку на осях, зміщені від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса 1 UA 68517 U 5 магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані зі входом диференціального підсилювача через суматор, який відрізняється тим, що підсилювально-перетворювальні канали, які з'єднані з перехресно розташованими відносно прохідного якоря магнітопроводами з котушками, підключені до входу диференціального підсилювача через суматор. Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюDifferential inductive force sensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДифференциальный индуктивный датчик усилий
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Мітки: датчик, зусиль, індуктивний, диференціальний
Код посилання
<a href="https://ua.patents.su/4-68517-diferencialnijj-induktivnijj-datchik-zusil.html" target="_blank" rel="follow" title="База патентів України">Диференціальний індуктивний датчик зусиль</a>
Диференціальний індуктивний датчик зусиль
Номер патенту: 61618
Опубліковано: 25.07.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: зусиль, датчик, диференціальний, індуктивний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 56822
Опубліковано: 25.01.2011
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: диференціальний, зусиль, індуктивний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованими симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками розміщені на одних осях і через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 55510
Опубліковано: 10.12.2010
Автор: Смірний Михайло Федорович
МПК: G01L 9/00
Мітки: зусиль, індуктивний, датчик, диференціальний
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального...
Диференціальний індуктивний датчик зусиль
Номер патенту: 50564
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
Мітки: диференціальний, зусиль, індуктивний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить першу пару магнітопроводів з котушками, розміщену по один бік прохідного якоря у зонах його протилежних торців, який відрізняється тим, що у датчику розташовано другу пару магнітопроводів з котушками симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з...
Диференціальний індуктивний датчик
Номер патенту: 64122
Опубліковано: 25.10.2011
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик, індуктивний, диференціальний
Формула / Реферат:
Диференціальний індуктивний датчик, що містить першу та другу пари магнітопроводів з котушками, розміщених по обидва боки прохідного якоря у зонах його протилежних торців на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, при цьому магнітопроводи з котушками з'єднані з підсилювально-перетворювальними каналами, який відрізняється тим, що...
Попередній патент: Пристрій для визначення механічних напружень у феромагнітних конструкціях
Наступний патент: Перетворювач переміщення у код
Випадковий патент: Тримач ультразвукового перетворювача і спосіб його виготовлення