Датчик вібрацій
Формула / Реферат
Датчик вібрацій, що містить корпус, постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як постійний циліндричний магніт застосовано постійний стрижневий прямокутний магніт, прикріплений боковими гранями через чотири пружини до корпусу, а як котушку застосовано дві пари ферозондів, розташованих у взаємно перпендикулярних площинах з боку бокових граней постійного стрижневого прямокутного магніту, при цьому ферозонди кожної з пар з'єднані один з одним за диференціальною схемою.
Текст
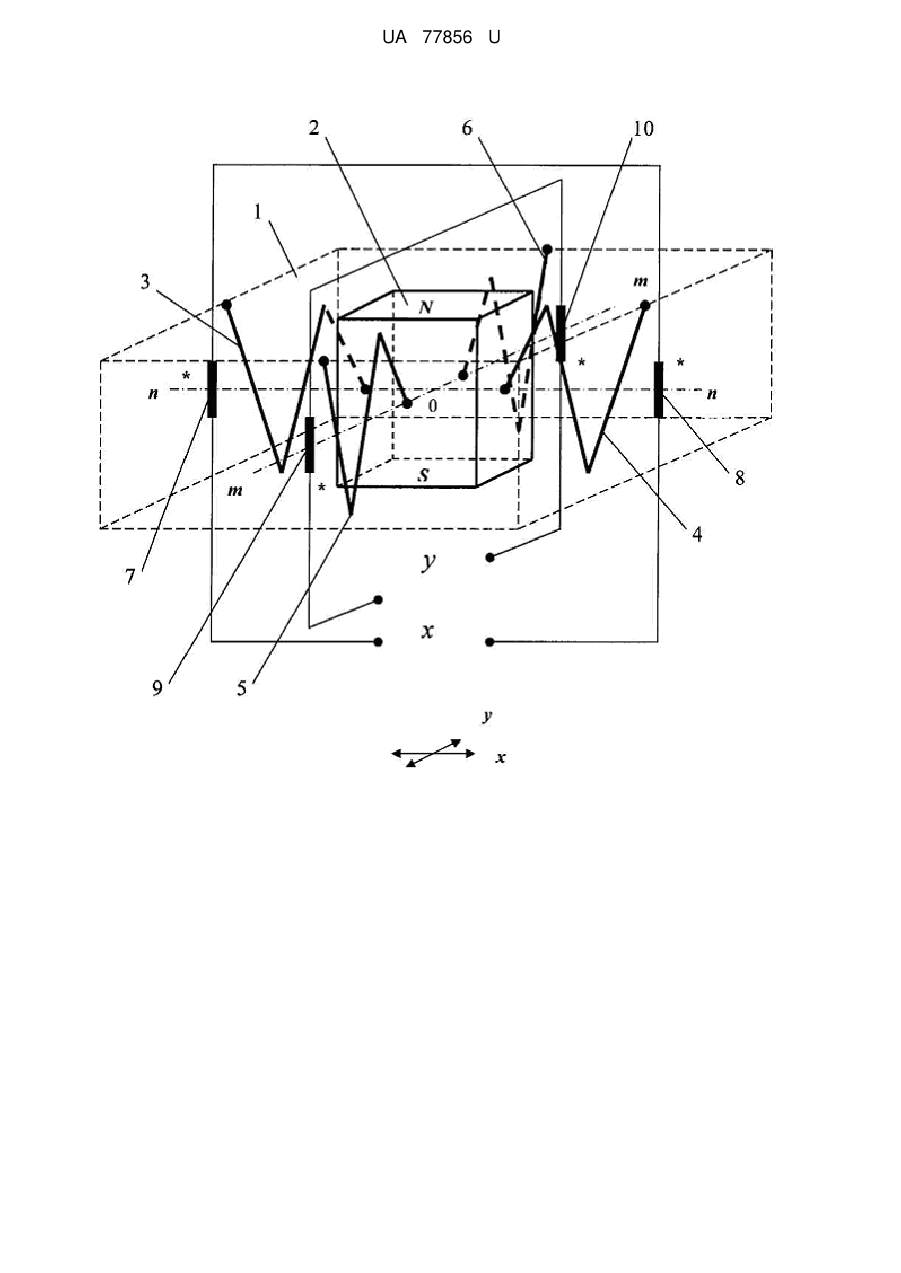
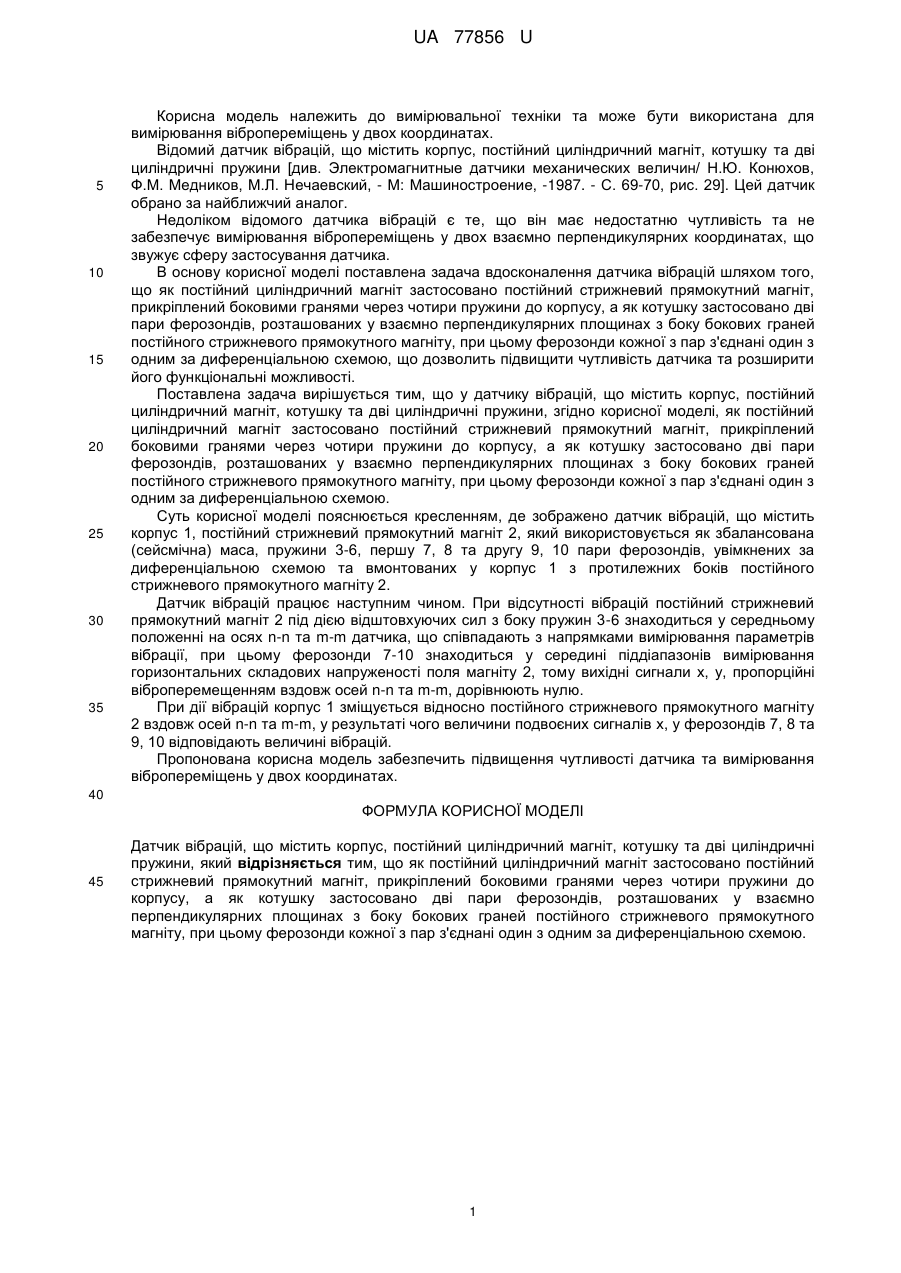
Реферат: UA 77856 U UA 77856 U 5 10 15 20 25 30 35 Корисна модель належить до вимірювальної техніки та може бути використана для вимірювання вібропереміщень у двох координатах. Відомий датчик вібрацій, що містить корпус, постійний циліндричний магніт, котушку та дві циліндричні пружини [див. Электромагнитные датчики механических величин/ Н.Ю. Конюхов, Ф.М. Медников, М.Л. Нечаевский, - М: Машиностроение, -1987. - С. 69-70, рис. 29]. Цей датчик обрано за найближчий аналог. Недоліком відомого датчика вібрацій є те, що він має недостатню чутливість та не забезпечує вимірювання вібропереміщень у двох взаємно перпендикулярних координатах, що звужує сферу застосування датчика. В основу корисної моделі поставлена задача вдосконалення датчика вібрацій шляхом того, що як постійний циліндричний магніт застосовано постійний стрижневий прямокутний магніт, прикріплений боковими гранями через чотири пружини до корпусу, а як котушку застосовано дві пари ферозондів, розташованих у взаємно перпендикулярних площинах з боку бокових граней постійного стрижневого прямокутного магніту, при цьому ферозонди кожної з пар з'єднані один з одним за диференціальною схемою, що дозволить підвищити чутливість датчика та розширити його функціональні можливості. Поставлена задача вирішується тим, що у датчику вібрацій, що містить корпус, постійний циліндричний магніт, котушку та дві циліндричні пружини, згідно корисної моделі, як постійний циліндричний магніт застосовано постійний стрижневий прямокутний магніт, прикріплений боковими гранями через чотири пружини до корпусу, а як котушку застосовано дві пари ферозондів, розташованих у взаємно перпендикулярних площинах з боку бокових граней постійного стрижневого прямокутного магніту, при цьому ферозонди кожної з пар з'єднані один з одним за диференціальною схемою. Суть корисної моделі пояснюється кресленням, де зображено датчик вібрацій, що містить корпус 1, постійний стрижневий прямокутний магніт 2, який використовується як збалансована (сейсмічна) маса, пружини 3-6, першу 7, 8 та другу 9, 10 пари ферозондів, увімкнених за диференціальною схемою та вмонтованих у корпус 1 з протилежних боків постійного стрижневого прямокутного магніту 2. Датчик вібрацій працює наступним чином. При відсутності вібрацій постійний стрижневий прямокутний магніт 2 під дією відштовхуючих сил з боку пружин 3-6 знаходиться у середньому положенні на осях n-n та m-m датчика, що співпадають з напрямками вимірювання параметрів вібрації, при цьому ферозонди 7-10 знаходиться у середині пiддіапазонів вимірювання горизонтальних складових напруженості поля магніту 2, тому вихідні сигнали х, у, пропорційні віброперемещенням вздовж осей n-n та m-m, дорівнюють нулю. При дії вібрацій корпус 1 зміщується відносно постійного стрижневого прямокутного магніту 2 вздовж осей n-n та m-m, у результаті чого величини подвоєних сигналів х, у ферозондів 7, 8 та 9, 10 відповідають величині вібрацій. Пропонована корисна модель забезпечить підвищення чутливості датчика та вимірювання вібропереміщень у двох координатах. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Датчик вібрацій, що містить корпус, постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як постійний циліндричний магніт застосовано постійний стрижневий прямокутний магніт, прикріплений боковими гранями через чотири пружини до корпусу, а як котушку застосовано дві пари ферозондів, розташованих у взаємно перпендикулярних площинах з боку бокових граней постійного стрижневого прямокутного магніту, при цьому ферозонди кожної з пар з'єднані один з одним за диференціальною схемою. 1 UA 77856 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Назва патенту англійськоюVibration sensor
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДатчик вибраций
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01G 9/00
Код посилання
<a href="https://ua.patents.su/4-77856-datchik-vibracijj.html" target="_blank" rel="follow" title="База патентів України">Датчик вібрацій</a>
Датчик вібрацій
Номер патенту: 74863
Опубліковано: 12.11.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Формула / Реферат:
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та дві циліндричні пружини, який відрізняється тим, що як котушку застосовано пару ферозондів, розташованих з протилежних боків постійного циліндричного магніту, при цьому ферозонди з'єднані один з одним за диференціальною схемою.
Датчик вібрацій
Номер патенту: 72846
Опубліковано: 27.08.2012
Автори: Смірний Михайло Федорович, Марченко Дмитро Миколайович
МПК: G01G 9/00
Формула / Реферат:
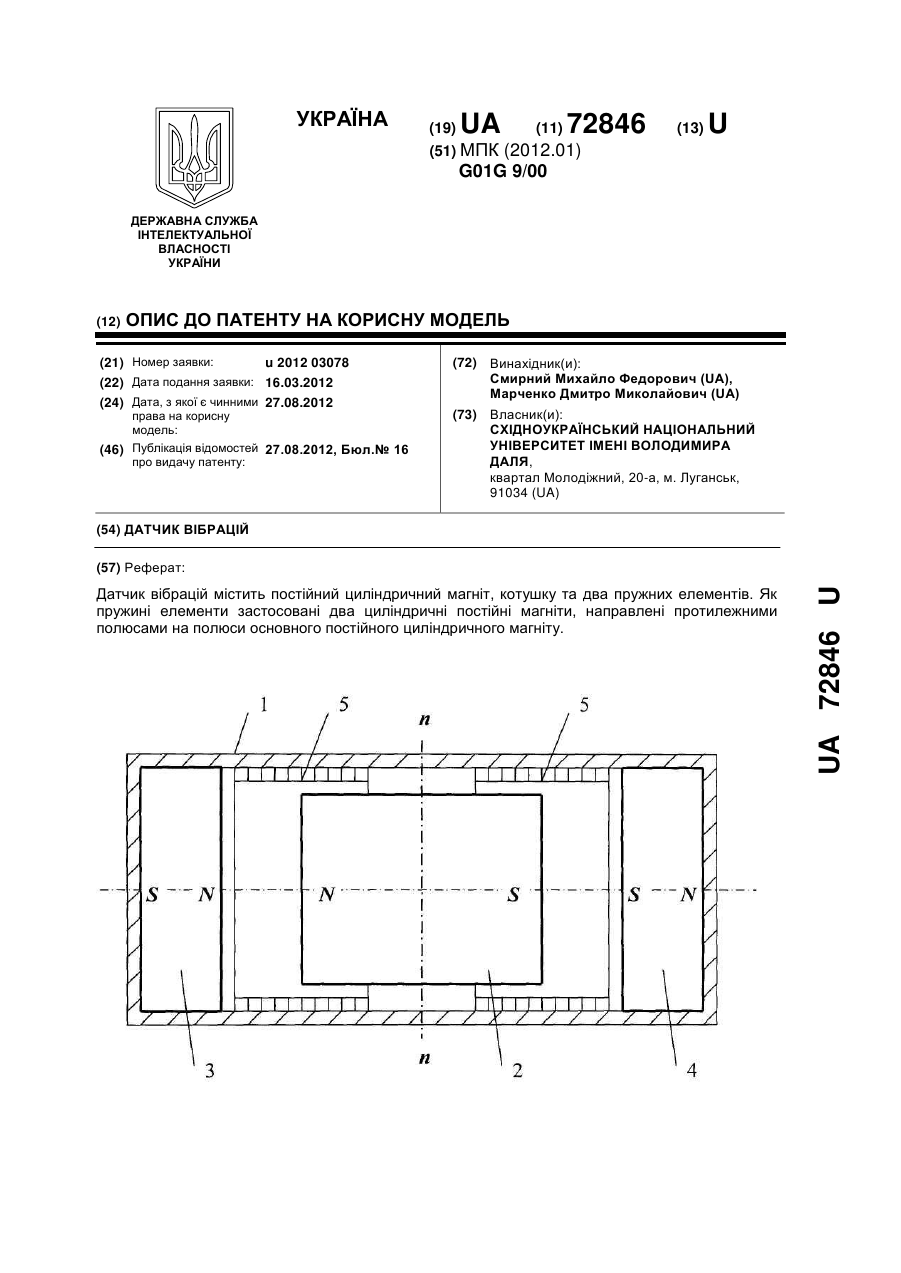
Датчик вібрацій, що містить постійний циліндричний магніт, котушку та два пружних елементів, який відрізняється тим, що як пружині елементи застосовані два циліндричні постійні магніти, направлені протилежними полюсами на полюси основного постійного циліндричного магніту.
Датчик
Номер патенту: 76669
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
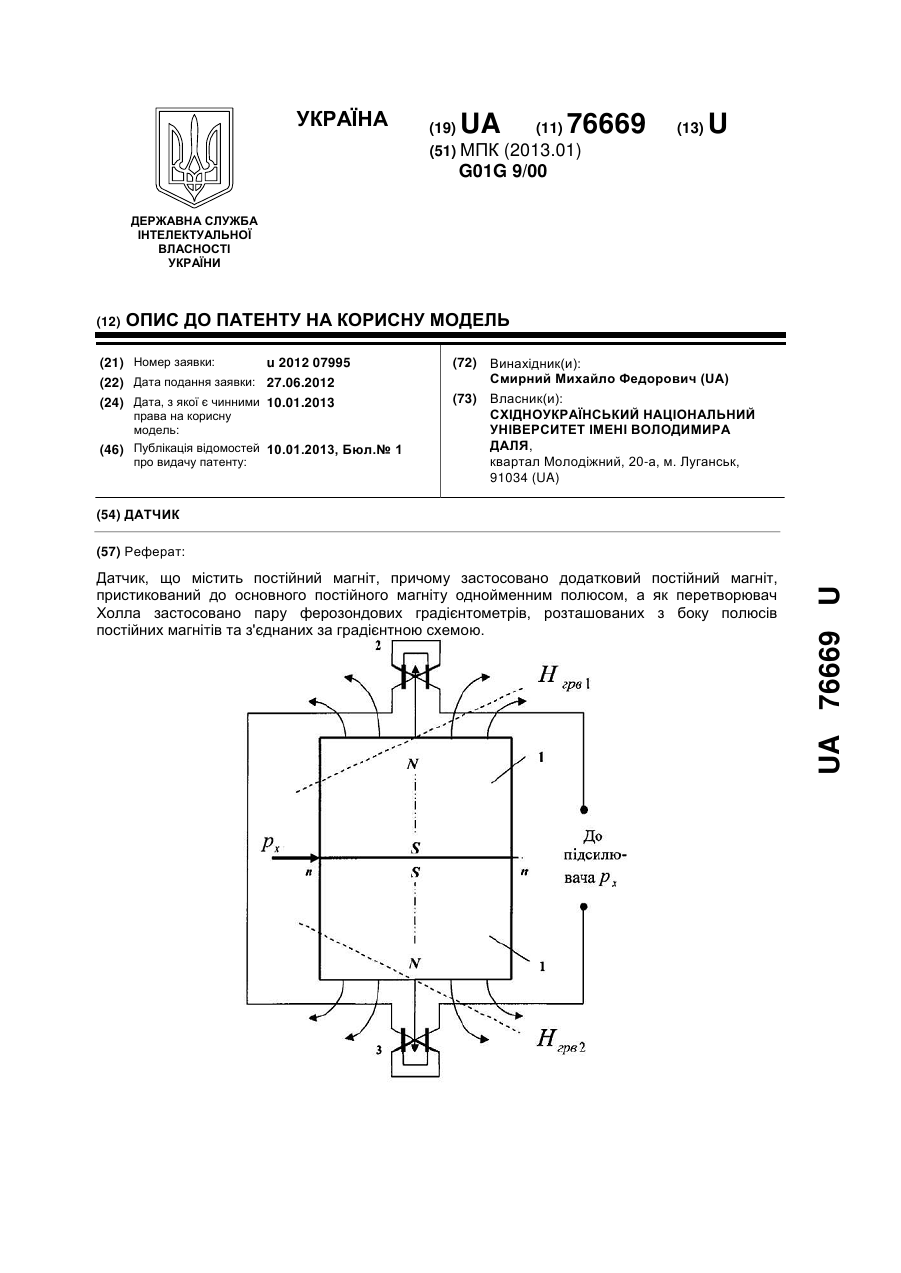
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, пристикований до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за градієнтною схемою.
Датчик
Номер патенту: 74386
Опубліковано: 25.10.2012
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
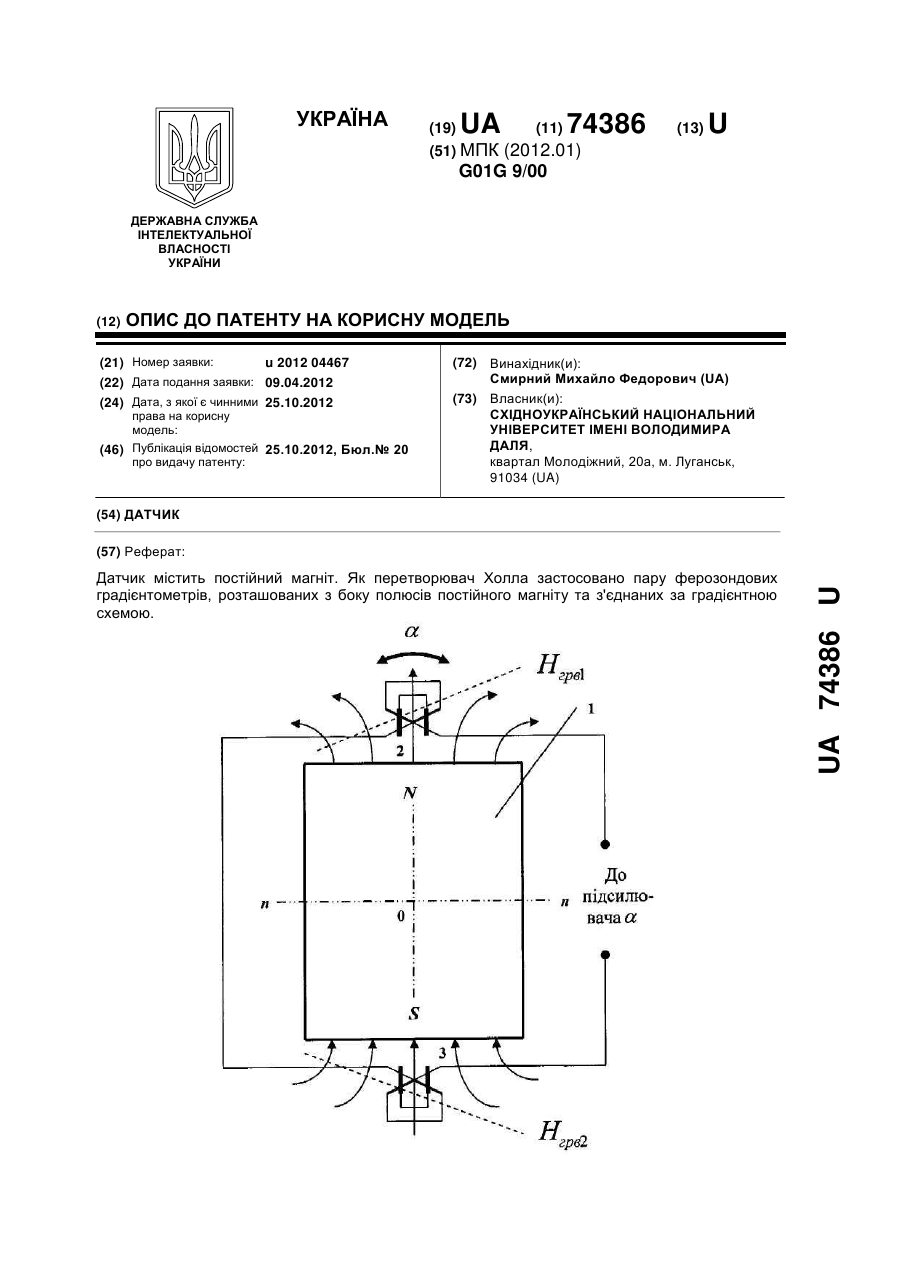
Датчик, що містить постійний магніт, який відрізняється тим, що як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійного магніту та з'єднаних за градієнтною схемою.
Датчик
Номер патенту: 76668
Опубліковано: 10.01.2013
Автор: Смірний Михайло Федорович
МПК: G01G 9/00
Мітки: датчик
Формула / Реферат:
Датчик, що містить постійний магніт, який відрізняється тим, що застосовано додатковий постійний магніт, пристикований до основного постійного магніту однойменним полюсом, а як перетворювач Холла застосовано пару ферозондових градієнтометрів, розташованих з боку полюсів постійних магнітів та з'єднаних за диференціальною схемою.
Попередній патент: Ваговимірювальний датчик
Наступний патент: Індуктивний датчик
Випадковий патент: Спосіб інваріантної компенсації впливу зовнішніх збурень та відмов аеродинамічних органів керування літального апарата