Спосіб безгирьової повірки платформних вагів
Номер патенту: 110351
Опубліковано: 25.12.2015
Автори: Сухінін Віктор Олександрович, Сухінін Андрій Вікторович
Формула / Реферат
Спосіб безгирьової повірки вагів з основою за допомогою переносних задатчиків сили й еталонних датчиків, що включає розміщення на вантажоприймальній платформі вагів об'єкта що зважується, рівного по масі, наприклад, найбільшій межі зважування, прикладення навантаження на ваги, що повіряються, навантажувальними пристроями, вимір цього навантаження еталонними датчиками, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, який відрізняється тим, що переносні задатчики сили з еталонними датчиками установлюють на основі вагів біля кожного датчика ваги з можливістю паралельного сприйняття навантажень кожною парою датчиків ваги й еталонних датчиків, кожним переносним задатчиком сили задають зусилля, що розвантажують вантажоприймальну платформу від найбільшої межі зважування до нуля, навантажують вантажоприймальну платформу від нуля до найбільшої межі зважування, за допомогою еталонних датчиків порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання вагів у цілому, а також показання кожного з датчиків ваги в межах регламентованого циклу розвантаження й навантаження вагів і визначають погрішність зважування.
Текст
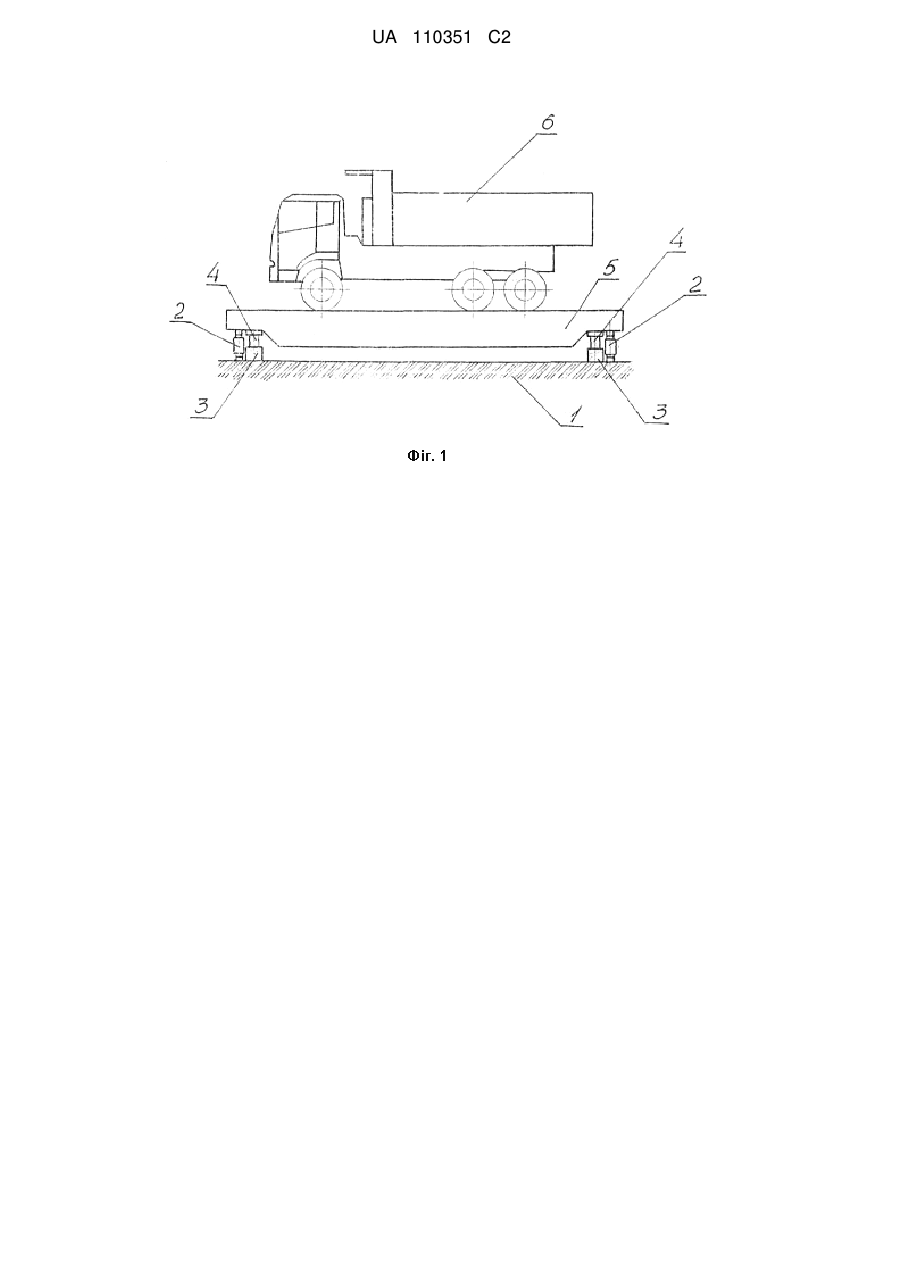
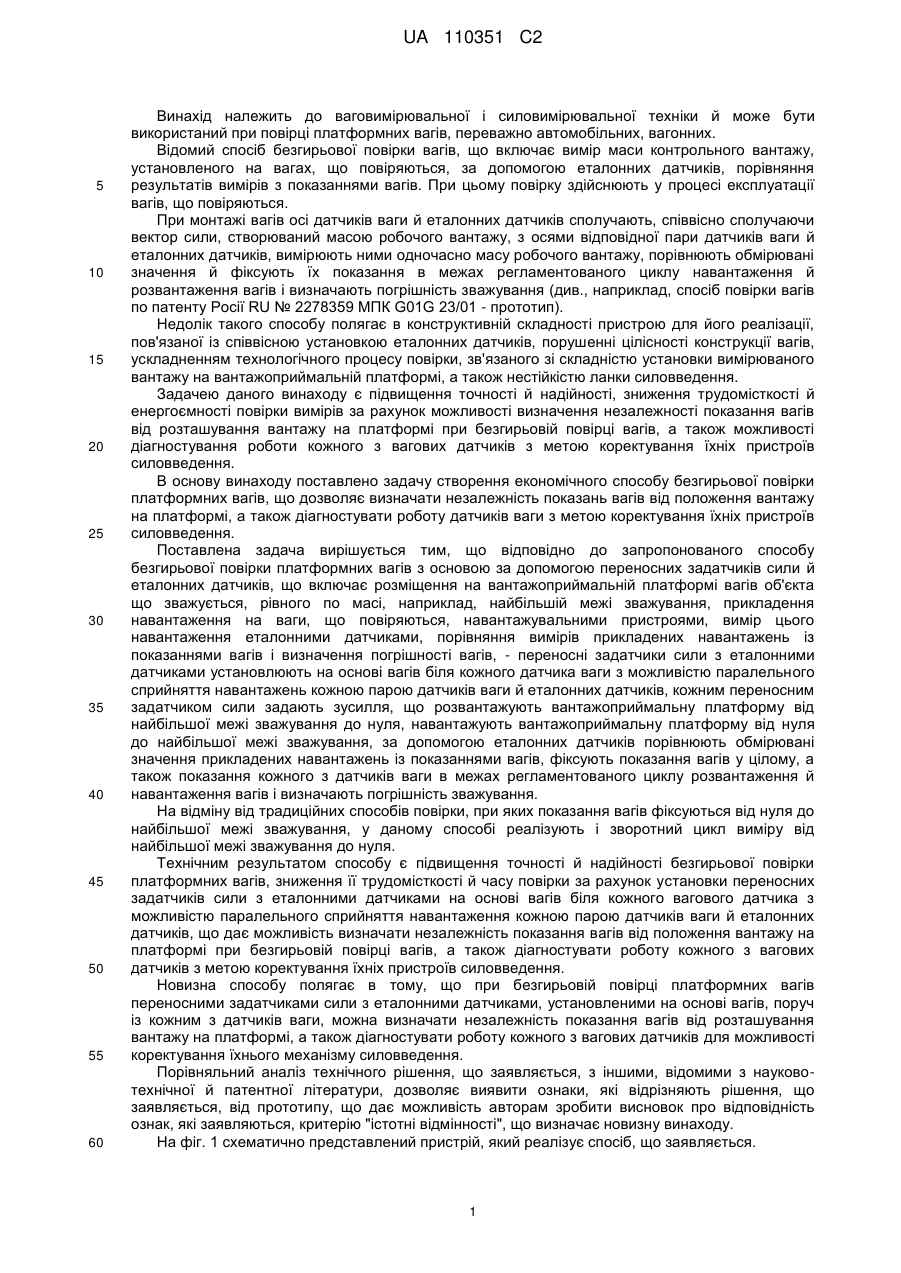
Реферат: Винахід належить до ваговимірювальної і силовимірювальної техніки й може бути використаний при повірці платформних вагів, переважно автомобільних, вагонних. Спосіб безгирьової повірки платформних вагів, при якому переносні задатчики сили з еталонними датчиками встановлюють на основі вагів біля кожного датчика ваги, кожним з переносних задатчиків сили задають зусилля, що розвантажують вантажоприймальну платформу від найбільшої межі зважування до нуля, навантажують вантажоприймальну платформу від нуля до найбільшої межі зважування, порівнюють обмірювані значення навантажень із показаннями вагів, фіксують показання вагів у цілому, а також показання кожного з датчиків ваги в межах регламентованого циклу розвантаження і навантаження вагів і визначають погрішність зважування. Технічний результат: підвищення точності й надійності безгирьової повірки платформних вагів, зниження її трудомісткості й часу повірки за рахунок установки переносних задатчиків сили з еталонними датчиками на основі вагів біля кожного вагового датчика з можливістю паралельного сприйняття навантаження кожною парою датчиків ваги й еталонних датчиків, що дає можливість визначати незалежність показання вагів від положення вантажу на платформі при безгирьовій повірці вагів, а також діагностувати роботу кожного з вагових датчиків з метою коректування їхніх пристроїв силовведення. UA 110351 C2 (12) UA 110351 C2 UA 110351 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до ваговимірювальної і силовимірювальної техніки й може бути використаний при повірці платформних вагів, переважно автомобільних, вагонних. Відомий спосіб безгирьової повірки вагів, що включає вимір маси контрольного вантажу, установленого на вагах, що повіряються, за допомогою еталонних датчиків, порівняння результатів вимірів з показаннями вагів. При цьому повірку здійснюють у процесі експлуатації вагів, що повіряються. При монтажі вагів осі датчиків ваги й еталонних датчиків сполучають, співвісно сполучаючи вектор сили, створюваний масою робочого вантажу, з осями відповідної пари датчиків ваги й еталонних датчиків, вимірюють ними одночасно масу робочого вантажу, порівнюють обмірювані значення й фіксують їх показання в межах регламентованого циклу навантаження й розвантаження вагів і визначають погрішність зважування (див., наприклад, спосіб повірки вагів по патенту Росії RU № 2278359 МПК G01G 23/01 - прототип). Недолік такого способу полягає в конструктивній складності пристрою для його реалізації, пов'язаної із співвісною установкою еталонних датчиків, порушенні цілісності конструкції вагів, ускладненням технологічного процесу повірки, зв'язаного зі складністю установки вимірюваного вантажу на вантажоприймальній платформі, а також нестійкістю ланки силовведення. Задачею даного винаходу є підвищення точності й надійності, зниження трудомісткості й енергоємності повірки вимірів за рахунок можливості визначення незалежності показання вагів від розташування вантажу на платформі при безгирьовій повірці вагів, а також можливості діагностування роботи кожного з вагових датчиків з метою коректування їхніх пристроїв силовведення. В основу винаходу поставлено задачу створення економічного способу безгирьової повірки платформних вагів, що дозволяє визначати незалежність показань вагів від положення вантажу на платформі, а також діагностувати роботу датчиків ваги з метою коректування їхніх пристроїв силовведення. Поставлена задача вирішується тим, що відповідно до запропонованого способу безгирьової повірки платформних вагів з основою за допомогою переносних задатчиків сили й еталонних датчиків, що включає розміщення на вантажоприймальній платформі вагів об'єкта що зважується, рівного по масі, наприклад, найбільшій межі зважування, прикладення навантаження на ваги, що повіряються, навантажувальними пристроями, вимір цього навантаження еталонними датчиками, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, - переносні задатчики сили з еталонними датчиками установлюють на основі вагів біля кожного датчика ваги з можливістю паралельного сприйняття навантажень кожною парою датчиків ваги й еталонних датчиків, кожним переносним задатчиком сили задають зусилля, що розвантажують вантажоприймальну платформу від найбільшої межі зважування до нуля, навантажують вантажоприймальну платформу від нуля до найбільшої межі зважування, за допомогою еталонних датчиків порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання вагів у цілому, а також показання кожного з датчиків ваги в межах регламентованого циклу розвантаження й навантаження вагів і визначають погрішність зважування. На відміну від традиційних способів повірки, при яких показання вагів фіксуються від нуля до найбільшої межі зважування, у даному способі реалізують і зворотний цикл виміру від найбільшої межі зважування до нуля. Технічним результатом способу є підвищення точності й надійності безгирьової повірки платформних вагів, зниження її трудомісткості й часу повірки за рахунок установки переносних задатчиків сили з еталонними датчиками на основі вагів біля кожного вагового датчика з можливістю паралельного сприйняття навантаження кожною парою датчиків ваги й еталонних датчиків, що дає можливість визначати незалежність показання вагів від положення вантажу на платформі при безгирьовій повірці вагів, а також діагностувати роботу кожного з вагових датчиків з метою коректування їхніх пристроїв силовведення. Новизна способу полягає в тому, що при безгирьовій повірці платформних вагів переносними задатчиками сили з еталонними датчиками, установленими на основі вагів, поруч із кожним з датчиків ваги, можна визначати незалежність показання вагів від розташування вантажу на платформі, а також діагностувати роботу кожного з вагових датчиків для можливості коректування їхнього механізму силовведення. Порівняльний аналіз технічного рішення, що заявляється, з іншими, відомими з науковотехнічної й патентної літератури, дозволяє виявити ознаки, які відрізняють рішення, що заявляється, від прототипу, що дає можливість авторам зробити висновок про відповідність ознак, які заявляються, критерію "істотні відмінності", що визначає новизну винаходу. На фіг. 1 схематично представлений пристрій, який реалізує спосіб, що заявляється. 1 UA 110351 C2 5 10 15 На основі (фундаменті) 1 вагів жорстко встановлені датчики 2 ваги, з кожним з яких поруч установлені переносні задатчики 3 сили з еталонними датчиками 4. На вантажоприймальній платформі 5 вагів установлений об'єкт 6, що зважується, рівний по масі, наприклад, найбільшої межі зважування. Спосіб, що заявляється, реалізується таким чином. При проведенні повірки кожним з переносних задатчиків 3 сили, попарно встановлених з датчиками 2 ваги, задають навантаження на вантажоприймальну платформу 5, розвантажуючи її, при цьому еталонні датчики 4 кожної пари датчиків навантажуються, а датчики 2 ваги розвантажуються на ту ж величину заданого зусилля. Таким чином, проводять поетапне навантаження-розвантаження датчиків 2 ваги від нуля до найбільшої межі зважування й назад; за допомогою еталонних датчиків 4 порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання вагів у цілому, а також показання кожного з датчиків 2 ваги в межах регламентованого циклу розвантаження й навантаження вагів і визначають погрішність зважування. Пропонований спосіб дозволяє в процесі безгирьової повірки платформних вагів визначати незалежність показань вагів від положення вантажу на платформі, діагностувати роботу кожного датчика ваги. У цей час НВЦ "Измеритель" (м. Одеса) розробляє пристрій для реалізації пропонованого способу безгирьової повірки вагів великовантажних автомобілів. 20 ФОРМУЛА ВИНАХОДУ 25 30 35 Спосіб безгирьової повірки вагів з основою за допомогою переносних задатчиків сили й еталонних датчиків, що включає розміщення на вантажоприймальній платформі вагів об'єкта, що зважується, рівного по масі, наприклад, найбільшій межі зважування, прикладення навантаження на ваги, що повіряються, навантажувальними пристроями, вимір цього навантаження еталонними датчиками, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, який відрізняється тим, що переносні задатчики сили з еталонними датчиками установлюють на основі вагів біля кожного датчика ваги з можливістю паралельного сприйняття навантажень кожною парою датчиків ваги й еталонних датчиків, кожним переносним задатчиком сили задають зусилля, що розвантажують вантажоприймальну платформу від найбільшої межі зважування до нуля, навантажують вантажоприймальну платформу від нуля до найбільшої межі зважування, за допомогою еталонних датчиків порівнюють обмірювані значення прикладених навантажень із показаннями вагів, фіксують показання вагів у цілому, а також показання кожного з датчиків ваги в межах регламентованого циклу розвантаження й навантаження вагів і визначають погрішність зважування. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
Автори англійськоюSukhinin Viktor Oleksandrovych, Sukhinin Andrii Viktorovych
Автори російськоюСухинин Виктор Александрович, Сухинин Андрей Викторович
МПК / Мітки
МПК: G01G 23/01, G01G 19/02
Мітки: вагів, повірки, платформних, безгирьової, спосіб
Код посилання
<a href="https://ua.patents.su/4-110351-sposib-bezgirovo-povirki-platformnikh-vagiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб безгирьової повірки платформних вагів</a>
Спосіб безгирьової повірки платформних вагів
Номер патенту: 101789
Опубліковано: 25.04.2013
Автори: Сухінін Віктор Олександрович, Дашевський Яків Тевелевич
МПК: G01G 23/00, G01G 19/02
Мітки: безгирьової, платформних, спосіб, вагів, повірки
Формула / Реферат:
Спосіб безгирьової повірки платформних вагів з основою за допомогою переносних задатчиків сили і еталонних датчиків, що включає розміщення на вантажоприймальній платформі вагів об'єкта, що зважується, рівного по масі, наприклад, найбільшій межі зважування, який відрізняється тим, що переносні задатчики сили з механізмами силовведення й еталонними датчиками розміщають поза основою й вантажоприймальною платформою вагів, що повіряються, а вимір...
Спосіб безгирьової повірки платформних вагів
Номер патенту: 106305
Опубліковано: 11.08.2014
Автор: Дашевський Яків Тевелевич
МПК: G01G 19/00, G01G 23/00
Мітки: безгирьової, вагів, платформних, повірки, спосіб
Формула / Реферат:
Спосіб безгирьової повірки платформних вагів за допомогою переносних механізмів силовведення з задатчиками сили і еталонних датчиків, що включає розміщення над вантажоприймальною платформою вагів об'єкта, що зважують, рівного по масі, наприклад, верхній межі значення заданого діапазону виміру, який відрізняється тим, що об'єкт, що зважують, встановлюють на опори, розміщені поза вантажоприймальною платформою вагів, що повіряють, переносні...
Спосіб безгирьової повірки платформних вагів
Номер патенту: 110349
Опубліковано: 25.12.2015
Автори: Сухінін Віктор Олександрович, Сухінін Андрій Вікторович
МПК: G01G 23/01, G01G 19/02
Мітки: вагів, спосіб, безгирьової, платформних, повірки
Формула / Реферат:
1. Спосіб безгирьової повірки платформних вагів за допомогою переносних задатчиків сили й еталонних датчиків, що включає прикладення навантаження на ваги, що повіряються, навантажуючим пристроєм, вимір цього навантаження еталонним датчиком, порівняння вимірів прикладених навантажень із показаннями вагів і визначення погрішності вагів, який відрізняється тим, що переносний задатчик сили з механізмом силовведення й еталонний датчик розміщають...
Спосіб повірки стаціонарних автомобільних ваг для зважування у русі

Номер патенту: 82731
Опубліковано: 12.08.2013
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/10
Мітки: стаціонарних, спосіб, повірки, автомобільних, зважування, русі, ваг
Формула / Реферат:
Спосіб повірки стаціонарних автомобільних ваг для зважування у русі, в якому для вимірювання зусилля, яке виникає при навантаженні вантажоприймальної платформи, використовують еталонні силовимірювальні модулі та еталонний прилад для вимірювання сигналу цих модулів, який відрізняється тим, що саме зусилля створюють шляхом навантаження еталонних силовимірювальних модулів колесами осі автомобіля і порівнюють при цьому показники еталонного...
Система поосьового зважування на платформних вагах
Номер патенту: 106013
Опубліковано: 10.07.2014
Автори: Бабак Олег Володимирович, Суровцев Ігор Вікторович, Татарінов Олексій Едуардович, Крижановський Юрій Антонович
МПК: G01G 19/02
Мітки: платформних, система, вагах, зважування, поосьового
Формула / Реферат:
Система поосьового зважування на платформних автомобільних вагах, яка містить вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконані у вигляді датчиків розтягнення-стиснення, які згруповані у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою,...
Попередній патент: Ортез на гомілковостопний суглоб і стопу
Наступний патент: Система керування електростатичною сепарацією
Випадковий патент: Пристрій для очищення повітря в шахтах від метану