Система поосьового зважування на платформних вагах
Номер патенту: 106013
Опубліковано: 10.07.2014
Автори: Крижановський Юрій Антонович, Татарінов Олексій Едуардович, Суровцев Ігор Вікторович, Бабак Олег Володимирович
Формула / Реферат
Система поосьового зважування на платформних автомобільних вагах, яка містить вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконані у вигляді датчиків розтягнення-стиснення, які згруповані у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою, яка відрізняється тим, що система селекції, керування і вимірювання складається з підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї, причому вихід цифрового відлікового пристрою каналом зв'язку під'єднаний до входів підсистем зважування при заїзді і з'їзді з вантажної платформи, що з'єднані між собою інформаційними входами-виходами, виходи яких каналом зв'язку підключені до системи обробки і відображення інформації.
Текст
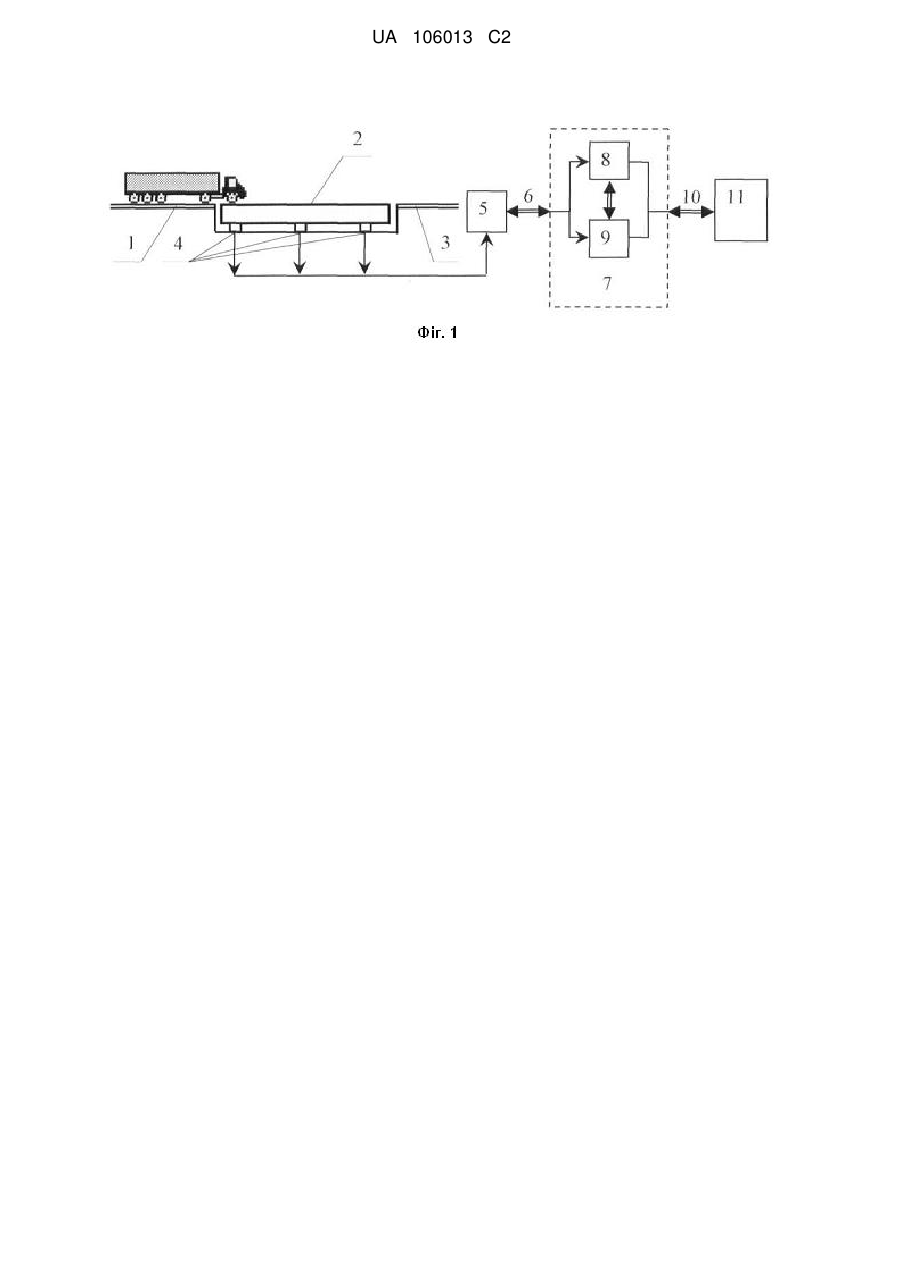
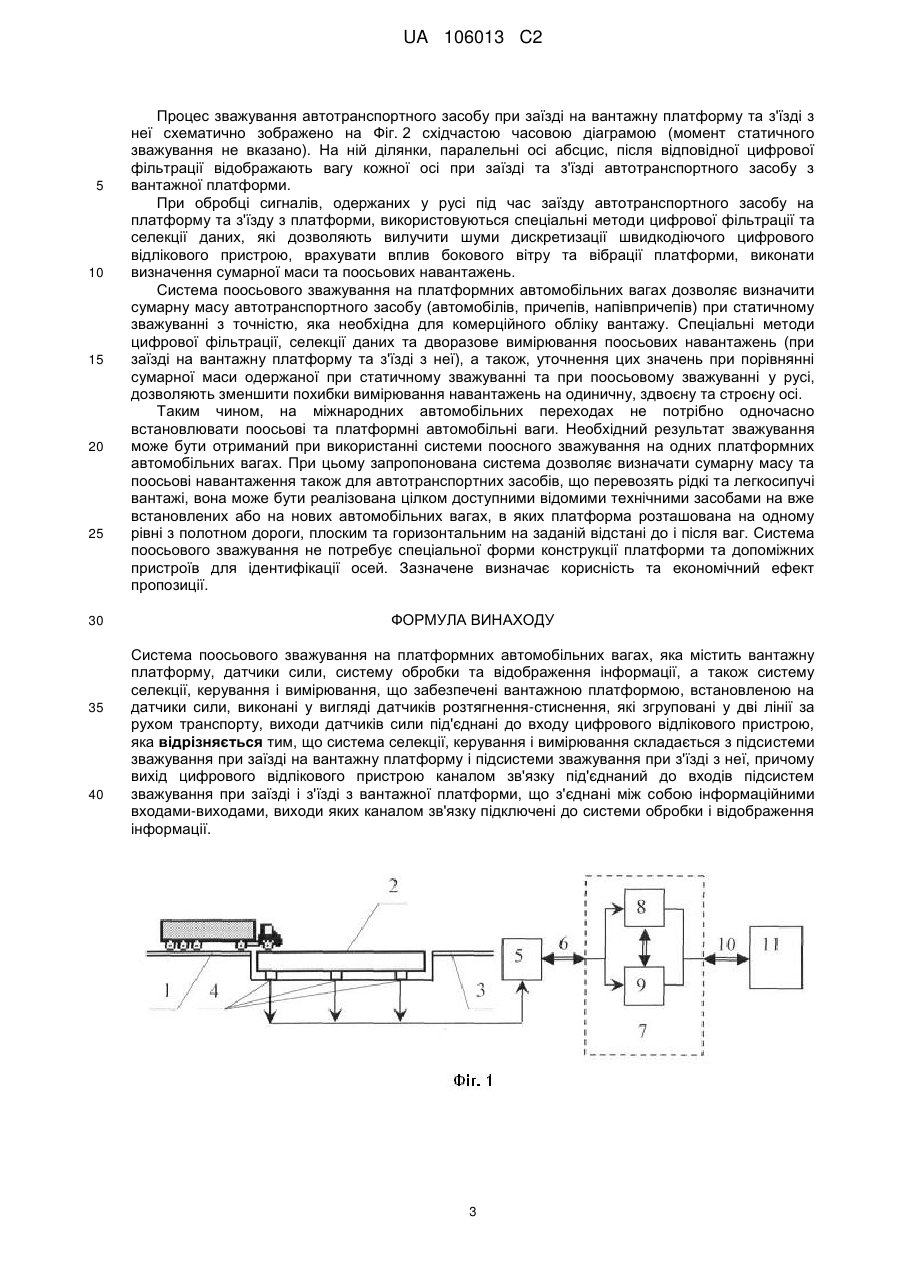
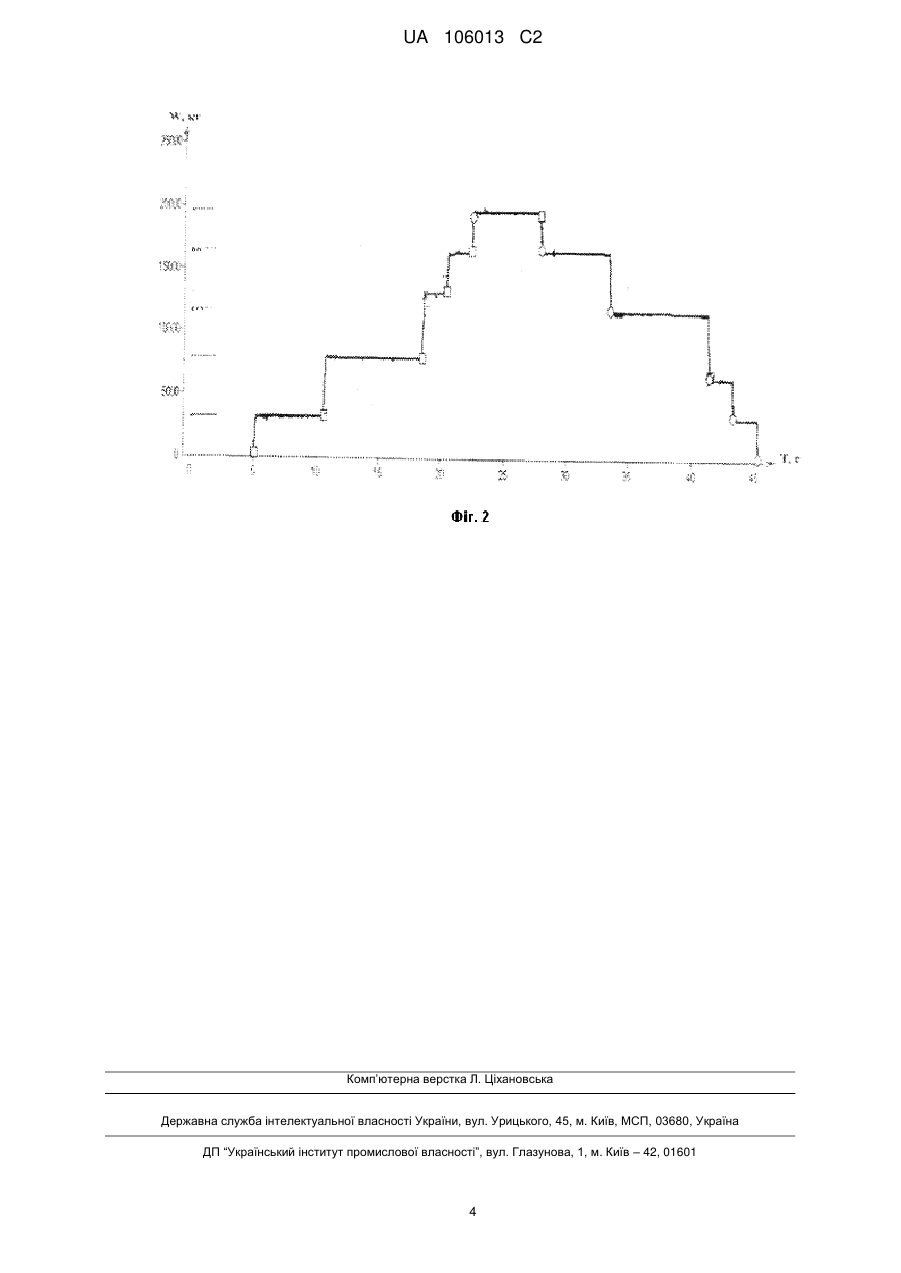
Реферат: Запропонована система поосьового зважування наплатформних автомобільних вагах, яка містить вантажну платформу, розташовану на одному рівні з полотном дороги, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконані у вигляді датчиків розтягнення-стиснення, згруповані у дві лінії за рухом транспорту. Виходи датчиків під'єднані до входу цифрового відлікового пристрою. Система поосьового зважування відрізняється тим, що система селекції, керування і вимірювання складається з: підсистеми зважування при заїзді на вантажну платформу (поосьові зважування, зупинка та статичне зважування сумарної маси) і підсистеми зважування при з'їзді з неї (поосьові зважування).Вихід швидкодіючого цифрового відлікового пристрою каналом зв'язку під'єднаний до входів підсистем зважування при заїзді і з'їзді з вантажної платформи, що з'єднані між собою інформаційними входами-виходами, виходи яких каналом зв'язку підключені до системи обробки і відображення інформації. UA 106013 C2 (12) UA 106013 C2 UA 106013 C2 5 10 15 20 25 30 35 40 45 50 55 Винахід належить до ваговимірювальної техніки, а саме до системи зважування на платформних автомобільних вагах, у яких вантажоприймальна платформа розташована на одному рівні з полотном дороги, і може бути використаний для визначення поосьових навантажень автотранспортних засобів (автомобілів, причепів, напівпричепів) при заїді на платформу та з'їзді з платформи, а також, сумарної маси при зупинці на ваговій платформі та статичному зважуванні. Для комерційного обліку вантажу, що перевозиться автотранспортним засобом, використовують платформні автомобільні ваги середнього класу точності. За способом встановлення вони можуть бути накладними (платформа ваг встановлюються зверху на полотно дороги з в'їзними та виїзними пандусами) або врізаними у полотно дороги (ваги встановлюється у приямку так, щоб вантажоприймальна платформа була розташована на одному рівні з полотном дороги). Габарити платформи ваг вибирають такими, щоб автотранспортний засіб повністю розміщувався на них при зважуванні. Особливих вимог до під'їзних шляхів платформних автомобільних ваг не висувають. Для комп'ютеризованого обліку результатів зважування платформні автомобільні ваги встановлюють на датчики сили, які з'єднуються з цифровим відліковим пристроєм. При статичному зважуванні автотранспортний засіб заїжджає та зупиняється на платформі ваг, виконується статичне зважування сумарної маси, результат виводиться на повільно діючий цифровий відліковий пристрій та передається через інтерфейс на комп'ютер у систему керування для подальшої обробки даних. Для визначення поосьових навантажень автотранспортного засобу використовують поосьові мобільні ваги для зважування під час руху, які дозволяють за результатами зважування обчислити сумарну масу та маси, що припадають на кожну вісь (одиничну, здвоєну, строєну), з точністю, що відповідає класу точності 0,5; 1,0 або 2,0. Поосьові мобільні ваги можуть мати різну конструкцією та різну довжину вагової платформи. За способом встановлення поосьові автомобільні ваги можуть бути накладними (переносними) або врізаними у полотно дороги (ваги встановлюються у приямку так, щоб вантажоприймальна платформа була розташована на одному рівні з полотном дороги). Габарити платформи врізаних у полотно дороги поосьових ваг вибирають такими, щоб колеса кожної осі автотранспортного засобу повністю розміщувалися на них при зважуванні під час руху (як правило, платформа таких поосьових ваг має ширину полотна дороги, довжину 0,6-0,9 м та встановлюється на датчики сили, які з'єднуються з цифровим відліковим пристроєм). До під'їзних шляхів поосних автомобільних ваг висувають особливі вимоги: полотно дороги до і після поосьових ваг повинно бути плоским та горизонтальним на заданій відстані. При динамічному зважуванні автотранспортний засіб проїжджає через ваги, поточні значення ваги виводяться на швидко діючому цифровому відліковому пристрої, передаються через інтерфейс на комп'ютер у систему керування для обчислення сумарної маси та маси, що припадає на кожну вісь автотранспортного засобу, а також, для подальшої обробки даних. Платформні автомобільні ваги також використовуються як поосьові ваги. Автотранспортний засіб проїжджає через платформні автомобільні ваги, виконується динамічне зважування, при цьому поточні значення ваги через швидкодіючий цифровий відліковий пристрій передаються по інтерфейсу на комп'ютер у систему керування для обчислення сумарної маси та маси, що припадає на кожну вісь автотранспортного засобу. Для виконання поосьового зважування на платформних автомобільних вагах використовують спеціальну форму конструкції платформи або допоміжні пристрої (контактні, безконтактні, оптичні датчики для ідентифікації осей). Перевагою поосьових автомобільних ваг є можливість визначення маси, що припадає на кожну вісь (одиничну, здвоєну, строєну), а недоліком поосьових автомобільних ваг - значна похибка обчислення сумарної маси, яка не дозволяє виконувати комерційний облік вантажу. Так, для автомобіля вагою 45-60 т, згідно з ГОСТ 30414-96, в частині вимог до сумарної маси автотранспортного засобу, похибка визначення сумарної маси на платформних автомобільних вагах у статиці становить ±60 кг, а на поосьових автомобільних вагах у русі для класу точності 0,5; 1,0; 2,0 становить відповідно ± 280 кг; і 560 кг; ±1120 кг. Значна похибка визначення сумарної маси автотранспортного засобу на поосьових вагах в динамічному режимі змушує на прикордонних міжнародних пунктах пропуску автомобілів встановлювати окремо платформні ваги для комерційного обліку вантажу автотранспортних засобів у статиці та поосьові ваги для визначення навантажень на одиничну, здвоєну та строєну осі у русі. Важливим є також те, що при проведенні кожної метрологічної повірки поосьових ваг необхідно попередньо зважувати автотранспортний засіб у статиці на платформних вагах для порівняння. При відсутності платформних ваг, розташованих біля поосьових ваг, це визиває значні незручності. Крім того, на поосьових автомобільних вагах забороняється визначати поосьові 1 UA 106013 C2 5 10 15 20 25 30 35 40 45 50 55 60 навантаження та сумарну масу для автотранспортних засобів, що перевозять рідкі та легкосипучі вантажі, із-за значних похибок зважування сумарної маси під час руху. Поосьові автомобільні ваги можуть мати різну конструкцію, наприклад, описану в патентах SU 1585688 "Устройство для взвешивания транспортных средств" та RU 2239798 "Способ поэлементного взвешивания автомобилей". Так, згідно патенту RU 2055453 "Автомобильные весы для поосного взвешивания", поосьові ваги містять вантажну платформу, силовий контур, датчики сили, а також систему селекції, керування і вимірювання, що забезпечені настилом у вигляді шаруватої металополімерної пластини, скріпленої з силовим контуром і розміщеної на вантажній платформі, підвішеній на датчиках сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту. Зазначений патент вибраний нами як прототип. Загальними ознаками прототипу та запропонованої системи зважування є те, що вони містять вантажну платформу, встановлену на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, та розташовану на одному рівні з полотном дороги, а також комп'ютерну систему селекції, керування і вимірювання. Недоліком найближчого аналога стосовно об'єкта, що заявляється, є значна похибка визначення сумарної маси автотранспортного засобу на поосьових вагах у русі, яка не дозволяє визначати сумарну масу на рівні похибок платформних ваг при комерційному обліку вантажу у статиці. В основу запропонованого винаходу поставлена технічна задача, а саме зменшення похибок визначення сумарної маси та поосьових навантажень при зважуванні автотранспортного засобу на платформних вагах. Поставлена задача вирішується тим, що автомобільні ваги для поосьового зважування, які містять вантажну платформу, встановлену на датчики сили, виконані у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту, під'єднаних до входу цифрового відлікового пристрою, а також систему селекції, керування і вимірювання, відрізняється тим, що система селекції, керування і вимірювання складається з: підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї. На Фіг. 1-2 відповідно, схематично зображені система поосьового зважування на платформних автомобільних вагах та загальна часова діаграма цифрових вагових значень датчиків сили (W - вага, Т - час). Система поосьового зважування на платформних автомобільних вагах (див. Фіг. 1) складається з плоскої та горизонтальної ділянки дороги 1, розташованої перед вантажною платформою 2, плоскої та горизонтальної ділянки дороги 3, розташованої після вантажної платформи 2, яка встановлена на датчики сили 4, виконаних у вигляді датчиків розтягненнястиснення, які з'єднуються з швидкодіючим цифровим відліковим пристроєм 5, який через канал зв'язку 6 з'єднується з системою селекції, керування та вимірювання 7, яка через канал зв'язку 10 з'єднується з системою обробки та відображення інформації 11. Система поосьового зважування на платформних автомобільних вагах працює наступним чином. Автотранспортний засіб з плоскої і горизонтальної ділянки дороги 1 заїжджає на вантажну платформу 2, зупиняється на вантажній платформі 2, а потім з'їжджає з неї на плоску горизонтальну ділянку дороги 3. У початковий момент часу включається підсистема зважування при заїзді 8, при цьому сигнали з датчиків сили 4 протягом заїзду автотранспортного засобу на платформу 2 через швидкодіючий цифровий відліковій пристрій 5 (аналого-цифровий перетворювач) каналом зв'язку 6 надходять в систему селекції, керування і вимірювання 7 у підсистему зважування при заїзді 8. Після зупинки автотранспортного засобу на вантажній платформі 2 та після сигналу оператора підсистема зважування при заїзді 8 переходить у режим статичного зважування та виконується визначення сумарної маси автотранспортного засобу. Після статичного зважування автоматично включається підсистема зважування при з'їзді 9, при цьому сигнали з датчиків сили 4 протягом з'їзду автотранспортного засобу з платформи 2 через швидкодіючий цифровий відліковій пристрій 5 каналом зв'язку 6 надходять в систему селекції, керування і вимірювання 7 у підсистему зважування при з'їзді 9. При цьому входи кожної підсистеми підключені до виходу швидкодіючого цифрового відлікового пристрою 5 каналом зв'язку 6, виходи підсистеми зважування при заїзді 8 і підсистеми зважування при з'їзді 9 з'єднані з системою обробки та відображення інформації 11 каналом зв'язку 10. Підсистеми зважування при заїзді на вантажну платформу 8 і зважування при з'їзді з неї 9 з'єднані між собою інформаційними входамивиходами. Оброблена інформація через канал зв'язку 10 надходить до системи обробки та відображення інформації 11. 2 UA 106013 C2 5 10 15 20 25 30 35 40 Процес зважування автотранспортного засобу при заїзді на вантажну платформу та з'їзді з неї схематично зображено на Фіг. 2 східчастою часовою діаграмою (момент статичного зважування не вказано). На ній ділянки, паралельні осі абсцис, після відповідної цифрової фільтрації відображають вагу кожної осі при заїзді та з'їзді автотранспортного засобу з вантажної платформи. При обробці сигналів, одержаних у русі під час заїзду автотранспортного засобу на платформу та з'їзду з платформи, використовуються спеціальні методи цифрової фільтрації та селекції даних, які дозволяють вилучити шуми дискретизації швидкодіючого цифрового відлікового пристрою, врахувати вплив бокового вітру та вібрації платформи, виконати визначення сумарної маси та поосьових навантажень. Система поосьового зважування на платформних автомобільних вагах дозволяє визначити сумарну масу автотранспортного засобу (автомобілів, причепів, напівпричепів) при статичному зважуванні з точністю, яка необхідна для комерційного обліку вантажу. Спеціальні методи цифрової фільтрації, селекції даних та дворазове вимірювання поосьових навантажень (при заїзді на вантажну платформу та з'їзді з неї), а також, уточнення цих значень при порівнянні сумарної маси одержаної при статичному зважуванні та при поосьовому зважуванні у русі, дозволяють зменшити похибки вимірювання навантажень на одиничну, здвоєну та строєну осі. Таким чином, на міжнародних автомобільних переходах не потрібно одночасно встановлювати поосьові та платформні автомобільні ваги. Необхідний результат зважування може бути отриманий при використанні системи поосного зважування на одних платформних автомобільних вагах. При цьому запропонована система дозволяє визначати сумарну масу та поосьові навантаження також для автотранспортних засобів, що перевозять рідкі та легкосипучі вантажі, вона може бути реалізована цілком доступними відомими технічними засобами на вже встановлених або на нових автомобільних вагах, в яких платформа розташована на одному рівні з полотном дороги, плоским та горизонтальним на заданій відстані до і після ваг. Система поосьового зважування не потребує спеціальної форми конструкції платформи та допоміжних пристроїв для ідентифікації осей. Зазначене визначає корисність та економічний ефект пропозиції. ФОРМУЛА ВИНАХОДУ Система поосьового зважування на платформних автомобільних вагах, яка містить вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконані у вигляді датчиків розтягнення-стиснення, які згруповані у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою, яка відрізняється тим, що система селекції, керування і вимірювання складається з підсистеми зважування при заїзді на вантажну платформу і підсистеми зважування при з'їзді з неї, причому вихід цифрового відлікового пристрою каналом зв'язку під'єднаний до входів підсистем зважування при заїзді і з'їзді з вантажної платформи, що з'єднані між собою інформаційними входами-виходами, виходи яких каналом зв'язку підключені до системи обробки і відображення інформації. 3 UA 106013 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюSurovtsev Ihor Viktorovych, Babak Oleh Volodymyrovych, Tatarinov Oleksii Eduardovych
Автори російськоюСуровцев Игорь Викторович, Бабак Олег Владимирович, Татаринов Алексей Эдуардович
МПК / Мітки
МПК: G01G 19/02
Мітки: зважування, система, вагах, поосьового, платформних
Код посилання
<a href="https://ua.patents.su/6-106013-sistema-poosovogo-zvazhuvannya-na-platformnikh-vagakh.html" target="_blank" rel="follow" title="База патентів України">Система поосьового зважування на платформних вагах</a>
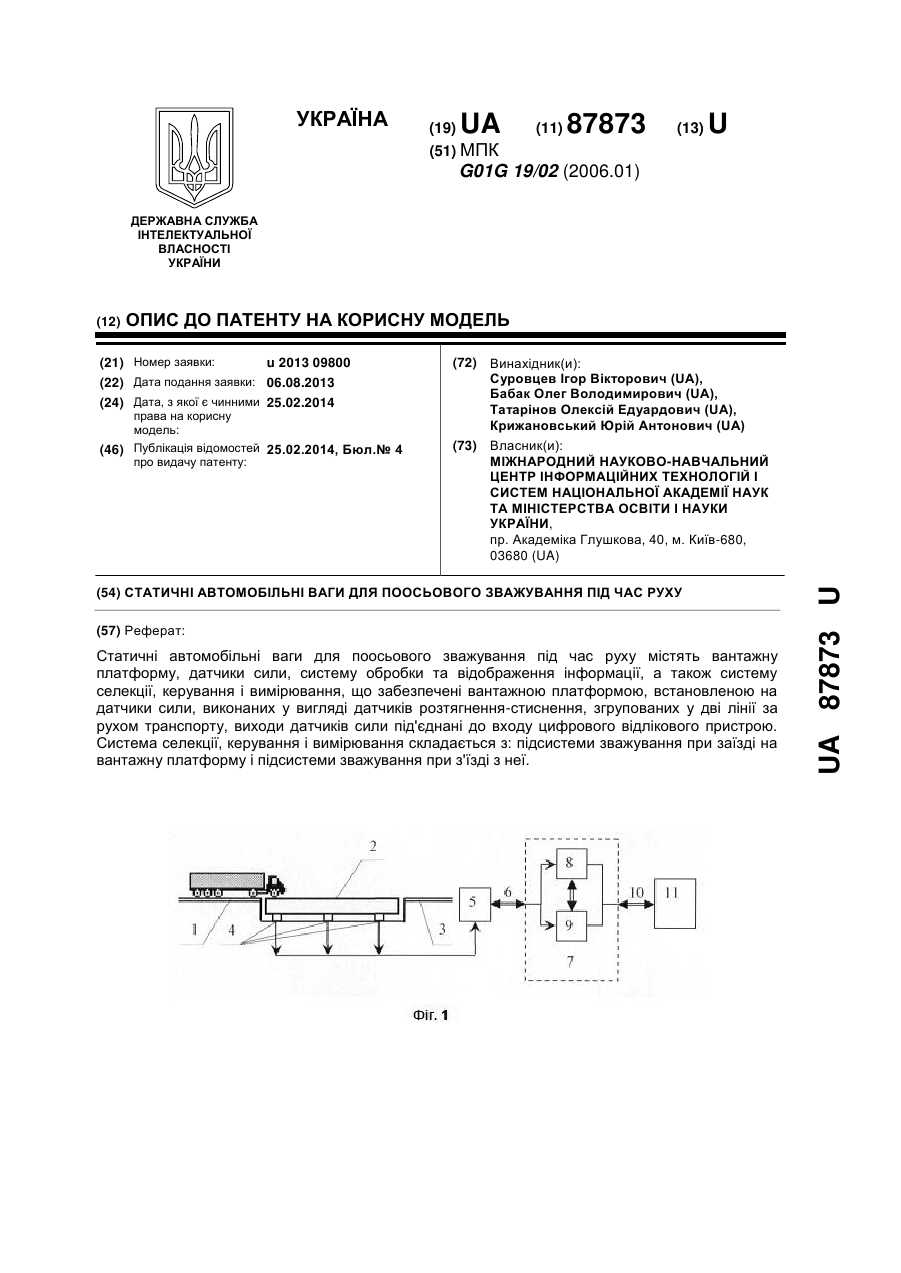
Статичні автомобільні ваги для поосьового зважування під час руху
Номер патенту: 87873
Опубліковано: 25.02.2014
Автори: Бабак Олег Володимирович, Крижановський Юрій Антонович, Татарінов Олексій Едуардович, Суровцев Ігор Вікторович
МПК: G01G 19/02
Мітки: статичні, зважування, автомобільні, поосьового, ваги, руху
Формула / Реферат:
Статичні автомобільні ваги для поосьового зважування під час руху, які містять вантажну платформу, датчики сили, систему обробки та відображення інформації, а також систему селекції, керування і вимірювання, що забезпечені вантажною платформою, встановленою на датчики сили, виконаних у вигляді датчиків розтягнення-стиснення, згрупованих у дві лінії за рухом транспорту, виходи датчиків сили під'єднані до входу цифрового відлікового пристрою,...
Низькопрофільні автомобільні ваги для поосьового зважування автотранспорту під час руху
Номер патенту: 65851
Опубліковано: 15.04.2004
Автори: Альтман Ілля Аронович, Кулик Сергій Федорович, Браз Давид Леонідович
МПК: G01G 19/02, B60P 5/00
Мітки: руху, ваги, низькопрофільні, автотранспорту, поосьового, зважування, автомобільні
Формула / Реферат:
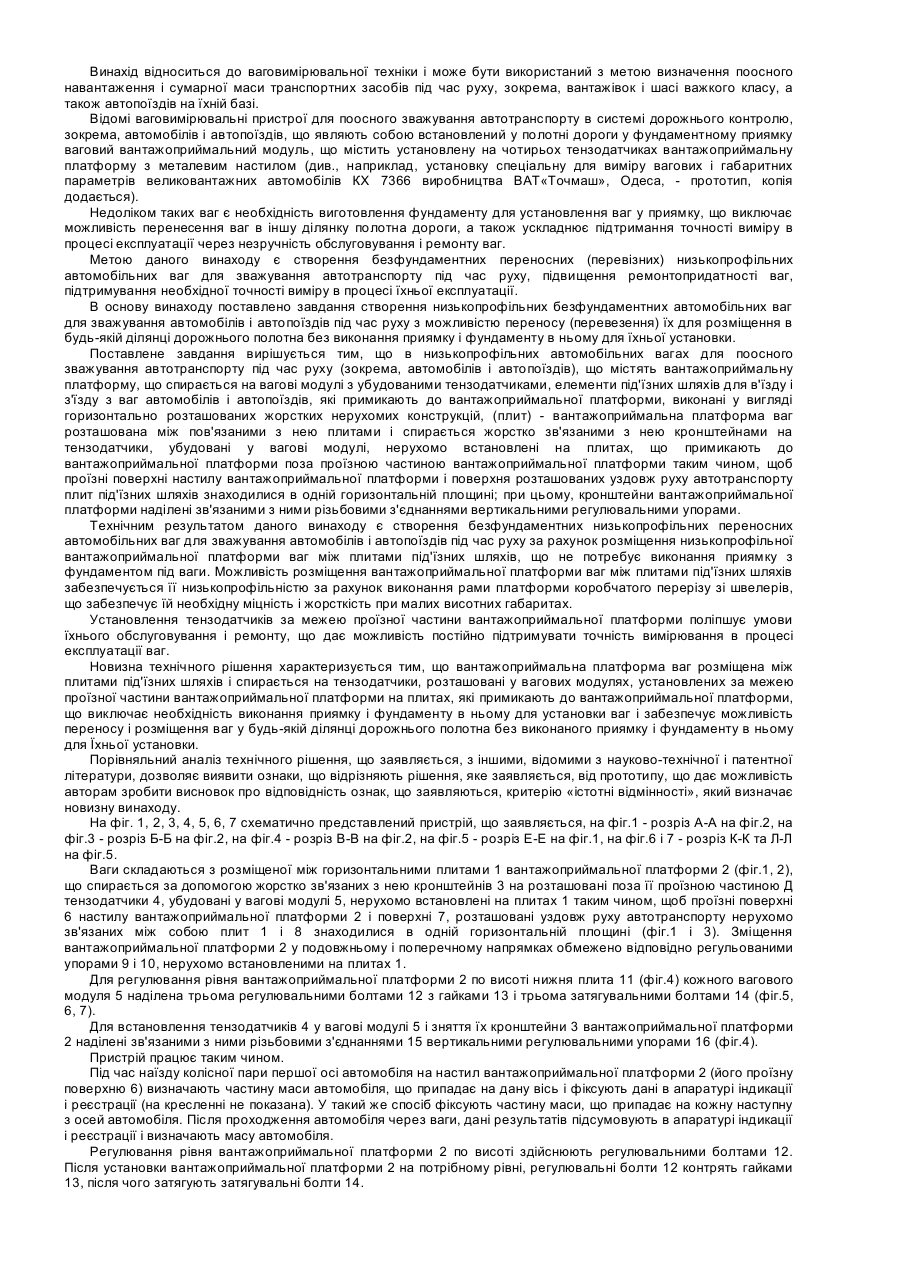
1. Низькопрофільні автомобільні ваги для поосьового зважування автотранспорту під час руху (зокрема, автомобілів і автопоїздів), що містять вантажоприймальну платформу, яка спирається на вмонтовані у вагові модулі тензодатчики, елементи під'їзних шляхів для в'їзду й з'їзду з ваг автомобілів і автопоїздів, що примикають до вантажоприймальної платформи, виконані у вигляді горизонтально розташованих жорстких стаціонарних конструкцій (плит), які...
Спосіб зважування шихти на вагах бункерної естакади

Номер патенту: 52834
Опубліковано: 10.09.2010
Автори: Крівченко Юрій Сергійович, Чорний Олександр Микитович, Степаненко Олександр Миколайович, Маковенко Анатолій Павлович
МПК: C21B 7/00, G01G 23/00
Мітки: вагах, спосіб, бункерної, зважування, естакаді, шихти
Формула / Реферат:
Спосіб зважування шихти на вагах бункерної естакади, що включає завантаження шихти, визначення її маси тензометричними датчиками та періодичної перевірки точності показників ваговимірювальних приладів, на яких встановлений ваговий бункер, який відрізняється тим, що перевірку точності показників проводять шляхом зрівняння показників еталонного ваговимірювального пристрою з показниками ваговимірювальних пристроїв бункерних ваг, для чого...
Спосіб зважування шихти у бункерних вагах бункерної естакади доменної печі
Номер патенту: 9232
Опубліковано: 15.09.2005
Автори: Бичков Сергій Васильович, Чорний Олександр Микитович, Аріст Леонід Михайлович, Крівченко Юрій Сергійович, Банніков Юрій Григорович, Маковенко Анатолій Павлович, Литвяк Василь Григорович, Андрющенко Ігор Валерійович
МПК: C21B 7/24, G01G 19/40
Мітки: зважування, шихти, бункерних, доменної, естакаді, спосіб, вагах, бункерної, печі
Формула / Реферат:
Спосіб зважування шихти в бункерних вагах бункерної естакади доменної печі шляхом завантаження шихти, визначення її маси тензометричними датчиками та періодичної перевірки точності показників, який відрізняється тим, що перевірку точності показників проводять навішуванням еталонних вантажів на суміщену підвіску, причому перед навішуванням вибирають зазори між рухомими елементами суміщеної підвіски і цапфами еталонних вантажів, а по різниці...
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху

Номер патенту: 67937
Опубліковано: 15.07.2004
Автори: Ситий Володимир Іванович, Сацюк Валерій Іванович, Раздобаров Віктор Георгійович, Чаков Олександр Миколайович, Лісовий Віталій Васильович
МПК: B60S 5/00, G01G 19/00
Мітки: зважування, технологічного, вагонів, транспорту, руху, поосьового, пристрій
Формула / Реферат:
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху, що містить вантажоприймальний вузол, який складається з платформи, що опирається на силовимірювальні датчики, підключені до аналого-цифрового перетворювача, вузол визначення напрямку руху, блок процесора з запам'ятовуючими пристроями, з входами якого з'єднані аналого-цифровий перетворювач і вузол визначення напрямку руху, а його вихід через інтерфейс з'єднаний...
Попередній патент: Імпульсний електродинамічний клапан
Наступний патент: Різальний інструмент з покриттям
Випадковий патент: Плунжер свердловинного штангового насосу