Спосіб екстремального регулювання вихідної частоти перетворювача
Номер патенту: 11233
Опубліковано: 15.12.2005
Автори: Саратовський Руслан Миколайович, Глєбін Анатолій Георгійович
Формула / Реферат
Спосіб екстремального регулювання вихідної частоти перетворювача, який полягає у тому, що формують і подають на перетворювач сигнал задання вихідної частоти, змінюють зазначений сигнал в одному з напрямків, вимірюють вихідну потужність перетворювача, формують пропорційно до неї сигнал, який відрізняється тим, що додатково формують коригуючий сигнал на зміну вихідної частоти, пропорційний швидкості зміни потужності.
Текст
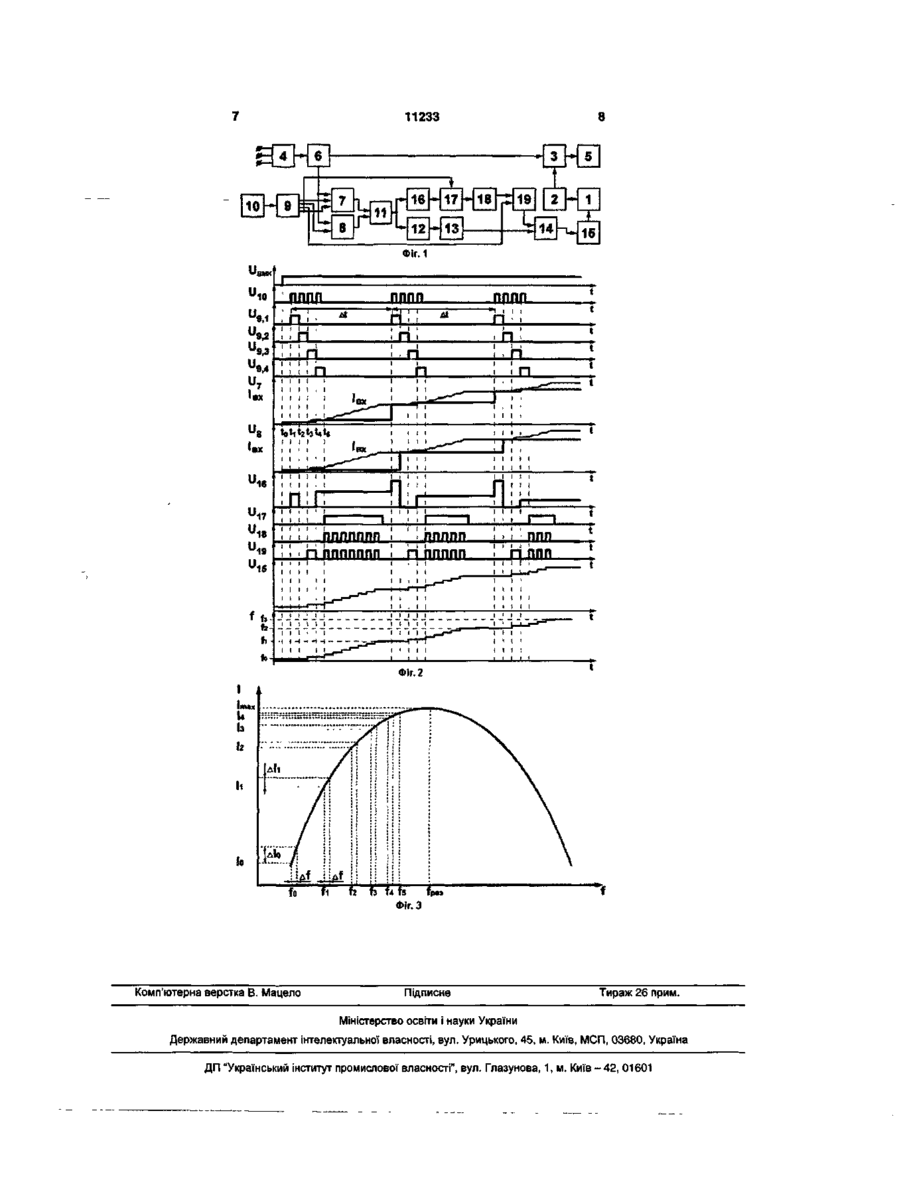
Спосіб екстремального регулювання вихідної частоти перетворювача, який полягає у тому, що формують і подають на перетворювач сигнал задання вихідної частоти, змінюють зазначений сигнал в одному з напрямків, вимірюють вихідну потужність перетворювача, формують пропорційно до неї сигнал, який відрізняється тим, що додатково формують коригуючий сигнал на зміну вихідної частоти, пропорційний швидкості зміни потужності Корисна модель відноситься до електротехніки, а саме до перетворювальної техніки і може бути використана для інтенсифікації різних технологічних процесів із застосуванням струмів підвищеної частоти Аналогічним за призначенням і метою корисної моделі є спосіб екстремального регулювання вихідної частоти перетворювача, який полягає в тому, що формують й подають на перетворювач сигнал завдання вихідної частоти, змінюють цей сигнал в одному з напрямків, вимірюють вихідну потужність перетворювача, формують пропорційно до неї сигнал [Ас СССР №1660117 кл Н02М7/00, 1988, опубл ЗО 06 91 Бюл №24] Недоліком цього способу регулювання є те, що пошук екстремуму здійснюється з постійною швидкістю зміни частоти (швидкість руху по модулю постійна і не залежить від швидкості зміни вихідної потужності при ЗМІНІ частоти перетворювача, та від м наближення до частоти, де виявляється максимум вихідної потужності) Це приводить до збільшення часу пошуку максимуму вихідної потужності і, отже, до підвищення тривалості настроювання інвертора перетворювача Технічною задачею корисної моделі є поліпшення способу екстремального регулювання вихідної частоти перетворювача, в якому додаткове формування коригуючого сигналу на зміну вихідної частоти, пропорційного швидкості зміни потужності, дозволило б удосконалити настроювання вихідної частоти перетворювача і за рахунок цього зменшити час пошуку максимуму вихідної потужності, і отже знизити тривалість настроювання інвертора перетворювача, що здійснюється новою схемною реалізацією способу і його алгоритмом, який дає можливість автоматично регулювати швидкість зміни частоти перетворювача залежно від й наближення до частоти, де виявляється максимум вихідної потужності Поставлена технічна задача досягається тим, що в способі екстремального регулювання вихідноі частоти перетворювача, який полягає в тому, що формують і подають на перетворювач сигнал завдання вихідної частоти, змінюють цей сигнал в одному з напрямків, вимірюють вихідну потужність перетворювача, формують пропорційно до неї сигнал, згідно з корисної моделі додатково формують коригуючий сигнал на зміну вихідної частоти, пропорційний швидкості зміни потужності На Фіг. 1 представлена блок-схема пристрою, що реалізує запропонований спосіб, на Фіг 2 - часові діаграми, що пояснюють роботу пристрою, на Фіг 3 - залежність інформаційного сигналу від частоти інвертора Пристрій містить керований генератор 1 (Фіг 1), блок 2 керування інвертором 3, який живиться від мережі через силовий випрямляч 4 і живить резонансне навантаження 5 У колі постійного струму живлення інвертором 3 установлений датчик 6 струму, що своїм виходом підключений до інформаційних входів пристроїв 7 і 8 вибірки й зберігання інформації Перший керуючий вхід пристрою 7 підключений до першого виходу десяткового лічильника 9 з дешифратором, а його другий керуючий вхід підключений до четвертого виходу десяткового лічильника 9, керуючий вхід пристрою СО СО 11233 8 підключений до другого виходу десяткового лічильника 9. Генератор 10 імпульсів підключений до тактового входу десяткового лічильника 9. Виходи пристроїв 7 і 8 підключені до різницевого підсилювача 11, призначеного для порівняння значення вхідного струму інвертора 3 перед зміненням частоти і після її змінення. Вихід різницевого підсилювача 11 приєднаний до блоку 12 визначення напрямку рахунку й до блоку 16 визначення модуля різниці величини двох порівнюваних значень вхідного струму. Вихід блоку 12 визначення напрямку рахунку підключений до RSтригера 13, який на своєму виході формує сигнал, що надходить на вхід напрямку рахунку реверсивного лічильника 14 і визначає напрямок змінення цифрового коду реверсивного лічильника 14, тобто збільшення або зменшення. Вихід лічильника 14 підключений до цифро-аналогового перетворювача 15, що перетворює цифровий код в напругу керування для керованого генератора 1. Величина керуючої напруги для генератора 1 визначається блоком 16 визначення модуля різниці. Вихід блоку 16 визначення модуля різниці підключений до керуючого входу мультивібратора 17, що чекає, а до тактового входу останнього підключений четвертий вихід десяткового лічильника 9. Вихід мультивібратора 17, що чекає підключений до входу дозволу мультивібратора 18, який формує на своєму виході кількість імпульсів, пропорційну різниці величини двох порівнюваних значень вхідного струму, тобто пропорційну коригуючому сигналу на зміну вихідної частоти, який пропорційний швидкості зміни потужності. Вихід мультивібратора 18 підключений до першого входу логічного елемента 19, вихід якого приєднаний до тактового входу реверсивного лічильника 14. До другого входу логічного елемента 19 приєднаний третій вихід десяткового лічильника 9, який на своєму виході формує імпульс, за фронтом якого відбувається перше змінення цифрового коду і відповідно частоти на величину t Пристрій працює таким чином. У момент часу to за сигналом ІІвмк (Фіг.2) на мінімальній частоті керування fo (Фіг.З) запускається інвертор 3, з'являється його вхідний струм, пропорційний його вихідної потужності, а значить і відповідний інформаційний сигнал Івх. Інформаційний сигнал з датчика 6 струму, установленого в колі вхідного струму інвертора 3, надходить на входи пристроїв 7 і 8 вибірки і зберігання інформації. Після запуску інвертора 3, у момент часу t i , запускається генератор 10 імпульсів, який формує на своєму виході чотири програмних імпульси з постійним циклом їхнього формування t Ці імпульси надходять на тактовий вхід десяткового лічильника 9 з дешифратором, внаслідок чого на кожному з чотирьох його виходів з'являються імпульси, котрі йдуть один за одним у часі. Сигнал з першого виходу десяткового лічильника 9 надходить на керуючий вхід пристрою 7 вибірки і зберігання інформації, у результаті чого за фронтом цього сигналу в момент часу ti, відбувається перезапис величини інформаційного сигналу. У проміжок часу від ti до t2 відбувається порівняння тільки що записаного значення інформаційного сигналу в пристрої 7 з раніше записаним значенням інфор маційного сигналу в пристрої 8. Порівняння здійснюється різницевим підсилювачем 11, на виході якого з'являється сигнал рівний різниці записаного значення інформаційного сигналу в пристрої 7 і раніше записаного значення інформаційного сигналу в пристрої 8. Отримана різниця сигналів надходить на блок 12 визначення напрямку рахунку, де відбувається визначення знака різниці двох порівнюваних сигналів. Якщо при порівнянні на виході різницевого підсилювача 11 сформувався позитивний знак або негативний, то на виході RSтригера 13 сформується сигнал, відповідно, або логічна одиниця «1», або логічний нуль «0», котрий надходить на вхід напрямку рахунку реверсивного лічильника 14. Таким чином, реверсивний лічильник 14 підготовляється або до збільшення, або до зменшення цифрового коду на своєму виході. У момент часу t 2 , на другому виході десяткового лічильника 9 з'являється імпульс, що надходить на керуючий вхід пристрою 8 вибірки і зберігання інформації, у результаті чого за фронтом цього сигналу відбувається перезапис величини інформаційного сигналу. Оскільки на етапі часу t2-t3, значення інформаційного сигналу, записаного в пристрої 7, дорівнює значенню інформаційного сигналу, записаного в пристрої 8, то при їхньому порівнянні на виході RS-тригера 13 сигнал не змінюється, й тим самим не змінюється напрямок рахунку реверсивного лічильника 14. У момент часу t3, на третьому виході десяткового лічильника 9 з'являється імпульс, що надходить на перший вхід логічного елемента 19, на виході якого формується імпульс, що надходить на тактовий вхід реверсивного лічильника 14. За фронтом цього імпульсу в момент часу t 3 , залежно від значення сигналу на вході напрямку рахунку відбувається змінення цифрового коду на виході реверсивного лічильника 14 на один розряд, що відповідає мінімальному зміненню частоти керування f, а відповідно і вхідного струму І інвертора 3 (Фіг.З). У момент часу t4, на четвертому виході десяткового лічильника 9 з'являється імпульс, який надходить на другий керуючий вхід пристрою 7 вибірки і зберігання інформації, у результаті чого за фронтом цього сигналу в момент часу t4, відбувається перезапис величини інформаційного сигналу. На етапі часу t4-t5, здійснюється порівняння в різницевому підсилювачі 11 тільки що записаного значення інформаційного сигналу в пристрої 7 з раніше записаним значенням інформаційного сигналу в пристрої 8. Отримана різниця сигналів надходить на блок 12 визначення напрямку рахунку і на блок 16 визначення модуля різниці записаних величин, де відбувається визначеннямодуля величини різниці двох порівнюваних сигналів. У результаті на керуючий вхід мультивібратора 17, що чекає надходить коригуючий сигнал на зміну вихідної частоти, пропорційний швидкості зміни потужності. Від величини цього сигналу залежить тривалість вихідного імпульсу мультивібратора 17, що чекає, який запускається за спадом імпульсу з четвертого виходу десяткового лічильника 9 в момент часу t 5 . Від тривалості вихідного імпульсу мультивібратора 17, що чекає залежить, яку кількість імпульсів сформує мультивібратор 18 на своєму виході, що підключений до другого входу логічного елемента 11233 19. У результаті на його виході сформується кількість імпульсів, що надходять на тактовий вхід реверсивного лічильника 14, яка пропорційна величині різниці двох порівняних сигналів за час імпульсу з четвертого виходу десяткового лічильника 9 t4-t5, тобто пропорційна коригуючому сигналу на зміну вихідної частоти, який пропорційний швидкості зміни потужності. Це приведе до змінення цифрового коду настільки, скільки мультивібратор 18 сформує вихідних імпульсів, що одночасно приведе до змінені частоти з fo до fi і вхідного струму інвертора 3 с Іо до U тощо, доки система не вийде на максимум інформаційного сигналу Lax (Фіг.З). Таким чином, сканування інформаційного сигналу буде здійснюватися з постійним інтервалом часу X а величина змінення частоти на кожному етапі сканування t6yfle залежати від різниці значень інформаційного сигналу: до збільшення і після його збільшення. Чим більше ця різниця, тим більше буде змінення частоти й тим швидше система буде виходити на максимум інформаційного сигналу, а швидкість зміни частоти залежить від швидкості зміни вимірювальної вихідної потужності перетворювача при змінені його частоти. Коли система вийде на максимум інформаційного сигналу, то буде перебувати в цьому стані доти, доки не відбудеться зміна параметрів навантаження, що призведе до зміни енергетичного режиму роботи інвертора 3, тобто зміни значення вхідного струму інвертора 3 і тим самим до зміни інформаційного сигналу. Як тільки зміниться інформаційний сигнал, котрий визначає енергетичний режим, то система відразу ж виявить цю зміну і настроїть частоту керування таким чином, що вже при нових параметрах навантаження знову виявиться максимум вхідного струму. Якщо початкове значення робочої частоти перетворювача менше резонансного, то величина різниці сигналів достатня і зміна робочої частоти відбувається у бік наявного резонансу. При положенні робочої частоти вище частоти резонансу, різниця від'ємна і пошук екстремуму відбувається у зворотному напрямку. Очевидно, що величина різниці при пошуку екстремуму на етапі дорівнює нулю лише на резонансній частоті, тому сталій частоті буде відповідати максимум інформаційного сигналу LaxПри загальній простоті пристрою він надійний і простий в експлуатації. Крім того, пристрій не критичний до крутизні нахилу резонансної кривої, що дозволяє здійснювати зміну частоти з постійним інтервалом часу t, але зі змінною швидкістю зміни частоти. Таким чином запропонований спосіб екстремального регулювання вихідної частоти перетворювача удосконалює настроювання вихідної частоти перетворювача, яке здійснюється новою схемною реалізацією способу і його алгоритмом, а це дає можливість автоматично регулювати швидкість зміни частоти перетворювача залежно від її наближення до частоти, де виявляється максимум вихідної потужності, і зменшити час пошуку екстремуму вихідної потужності, і, отже, знизити тривалість настроювання інвертора. 11233 4 10 -*• 9 :; 6 7 8 L 11 r «j - 3 , 16 • 17 »» 18 12 13 •ЧИ 19 Фіг. 1 5 2 1 14 15 • 4 t '10 ft Комп'ютерна верстка В. Мацело Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул. Глазунова, 1, м. Київ - 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for optimally controlling the output frequency of a frequency converter
Автори англійськоюSaratovskyi Ruslan Mykolaiovych, Hliebin Anatolii Heorhiiovych
Назва патенту російськоюСпособ экстремального регулирования выходной частоты преобразователя частоты
Автори російськоюСаратовский Руслан Николаевич, Глебин Анатолий Георгиевич
МПК / Мітки
МПК: H02M 7/505
Мітки: перетворювача, регулювання, спосіб, екстремального, вихідної, частоти
Код посилання
<a href="https://ua.patents.su/4-11233-sposib-ekstremalnogo-regulyuvannya-vikhidno-chastoti-peretvoryuvacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб екстремального регулювання вихідної частоти перетворювача</a>
Пристрій регулювання потужності дволанкового перетворювача частоти
Номер патенту: 46533
Опубліковано: 15.04.2004
Автори: Аззам Аль Сатри Хасан Диаб, Випанасенко Станіслав Іванович
Мітки: потужності, дволанкового, регулювання, пристрій, перетворювача, частоти
Формула / Реферат:
Пристрій регулювання потужності дволанкового перетворювача частоти з випрямлячем, з’єднаним з інвертором, який з’єднаний з навантаженням у вигляді паралельного коливального контуру, що містить також лічильник з трьома входами, компаратор, задатчик кратності періоду імпульсів інвертора, вихід якого з'єднано з першим входом лічильника, та датчик напруги навантаження, який відрізняється тим, що введено датчики струму, включені відповідно в...
Спосіб регулювання потужності дволанкового перетворювача частоти
Номер патенту: 3293
Опубліковано: 27.12.1994
Автори: Півняк Геннадій Григорович, Випанасенко Станіслав Іванович
Мітки: спосіб, потужності, частоти, перетворювача, регулювання, дволанкового
Формула / Реферат:
Способ регулирования мощности двухзвенного преобразователя частоты, включающего выпрямитель и инвертор, ток нагрузки которого содержит основную и высшие гармонические составляющие, заключающийся в том, что формируют сигнал задания, пропорциональный регулируемому параметру, измеряют регулируемый параметр, полученный сигнал сравнивают с сигналом задания и при превышении первым второго изменяют длительность паузы тока нагрузки в сторону...
Устрій до пуску перетворювача частоти для регулювання асинхроного короткозамкнутого двигуна
Номер патенту: 12012
Опубліковано: 25.12.1996
Автори: Тютюнников Анатолій Олександрович, Богатирев Вадим Павлович, Калашников Борис Євгеньович, Епштейн Ісаак Ізраільович, Бару Олександр Юріьович
МПК: H02M 5/02
Мітки: асинхроного, устрій, пуску, регулювання, перетворювача, двигуна, частоти, короткозамкнутого
Формула / Реферат:
Устройство для пуска преобразователя частоты для регулирования асинхронного короткозамкнутого двигателя, включающего последовательно соединенные управляемый выпрямитель, сглаживающий дроссель и автономный инвертор тока с отсекающими диодами, содержащее командоаппарат включения, систему управления инвертором, последовательно соединенные регулятор тока и систему управления выпрямителем и блок задания тока и частоты в рабочем режиме,...
Схема регулювання частоти
Номер патенту: 73662
Опубліковано: 15.08.2005
Автори: Седлак Хольгер, Ведер Уве, Гуо Шуей, Кніффлер Олівер
Мітки: регулювання, схема, частоти
Формула / Реферат:
1. Схема регулювання частоти для залежного від споживаного струму регулювання тактової частоти електронного пристрою, яка містить- струмовимірювальний пристрій (2) для вимірювання поточного значення струму, споживаного електронним пристроєм (1),- керовану схему (4) формування тактового сигналу, з'єднувану з тактовим входом (11) електронного пристрою (1), і- керуючий пристрій (3) для керування схемою (4) формування...
Пристрій для контролю і регулювання вихідної щілини конусної дробарки
Номер патенту: 33581
Опубліковано: 15.02.2001
Автори: Кононенко Олексій Михайлович, Гордієнко Олександр Миколайович, Веремєйцев Валерій Петрович
МПК: B02C 2/00
Мітки: дробарки, щілини, регулювання, вихідної, пристрій, конусної, контролю
Текст:
...опорного кільця 2 поблизу траєкторії, описуваної зубами 7. Датчики 14 дають інформацію в блок обліку обертів 15 регулюючого кільця 1. Обчислювальний прилад 16 складається з блоку 17 визначення положення храпового колеса 4, блоку 18 визначення напряму обертання храпового колеса, генератора 19 тактових імпульсів, формувача імпульсів 20 і лічильника 21. Датчики 22 установлено на силовому циліндрі 8 для подання інформації про контакт між...
Попередній патент: Пристрій для регенерації рукавних фільтрів
Наступний патент: Спосіб збирання ягід
Випадковий патент: Спосіб спектроскопічної реєстрації активності 90 sr