Привод переміщення вихідного органа верстата з п’ятьма штангами
Номер патенту: 114304
Опубліковано: 10.03.2017
Автори: Кириченко Андрій Миколайович, Гречка Андрій Іванович, Аль-Ібрахімі Метак М.А.
Формула / Реферат
Привод переміщення вихідного органа верстата з п'ятьма штангами на основі паралельних кінематичних структур, що містить станину, механізми подачі п'яти штанг, які пов'язані з вихідним органом, який відрізняється тим, що вихідний орган складається з двох частин, поєднаних між собою шарніром з двома ступенями свободи, причому три штанги приєднується до однієї частини вихідного органа і мають конструкцію, що забезпечує переміщення цієї частини вихідного органа по трьох лінійних координатах без зміни кутової орієнтації відносно станини, а інші дві штанги приєднуються до іншої частини вихідного органа.
Текст
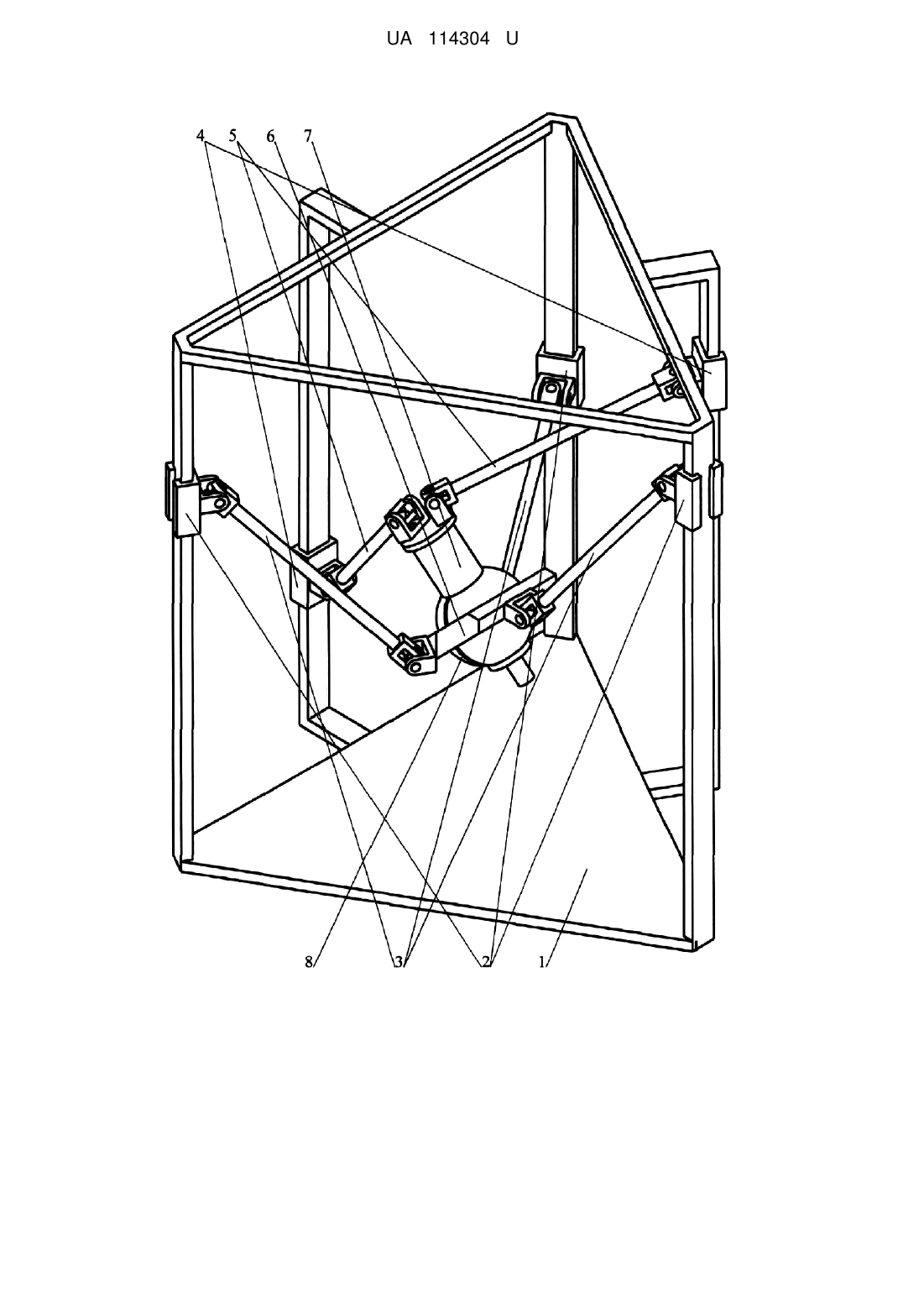
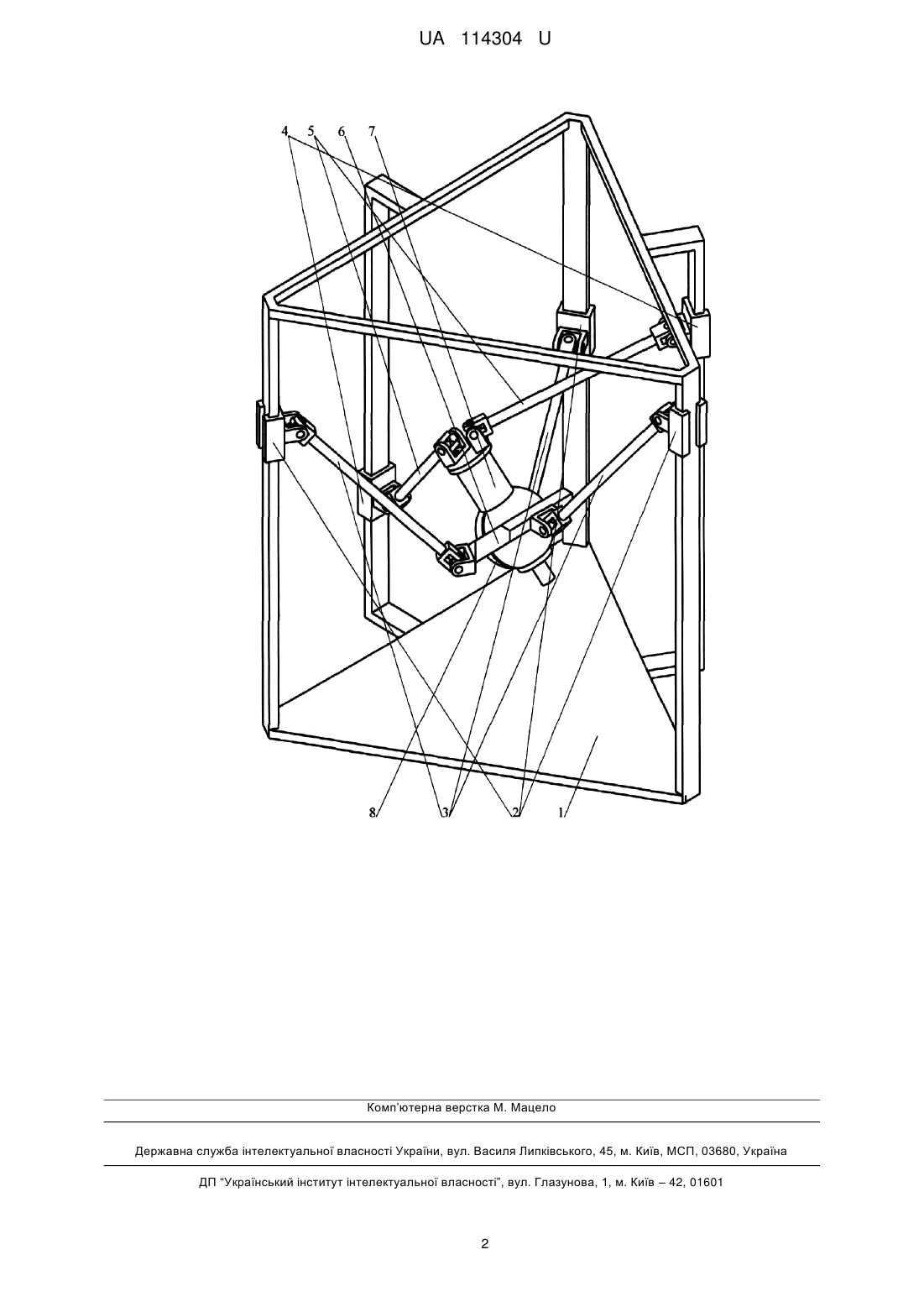
Реферат: Привод переміщення вихідного органа верстата з п'ятьма штангами на основі паралельних кінематичних структур містить станину, механізми подачі п'яти штанг, які пов'язані з вихідним органом. Вихідний орган складається з двох частин, поєднаних між собою шарніром з двома ступенями свободи. При цьому три штанги приєднується до однієї частини вихідного органа і мають конструкцію, що забезпечує переміщення цієї частини вихідного органа по трьох лінійних координатах без зміни кутової орієнтації відносно станини, а інші дві штанги приєднуються до іншої частини вихідного органа. UA 114304 U (54) ПРИВОД ПЕРЕМІЩЕННЯ ВИХІДНОГО ОРГАНА ВЕРСТАТА З П'ЯТЬМА ШТАНГАМИ UA 114304 U UA 114304 U 5 10 15 20 25 30 Корисна модель належить до верстатобудування. Відомий привод переміщення вихідного органа верстата з п'ятьма штангами на основі паралельних кінематичних структур, який забезпечує рух даного органа по трьох лінійних і двох кутових координатах [1]. У відомому приводі переміщення рух по будь-якій з координат вимагає руху подачі кожної штанги, що зменшує рухомість вихідного органа. Задачею корисної моделі є підвищення рухомості вихідного органа верстата на основі паралельних кінематичних структур з п'ятьма штангами шляхом розділення штанг на функціональні групи. Поставлена задача вирішується тим, привод переміщення вихідного органа верстата з п'ятьма штангами на основі паралельних кінематичних структур, що містить станину, механізми подачі п'яти штанг, які пов'язані з вихідним органом, згідно з корисною моделлю, вихідний орган складається з двох частин, поєднаних між собою шарніром з двома ступенями свободи, причому три штанги приєднується до однієї частини вихідного органа і мають конструкцію, що забезпечує переміщення цієї частини вихідного органа по трьох лінійних координатах без зміни кутової орієнтації відносно станини, а інші дві штанги приєднуються до іншої частини вихідного органа. Схема приводу переміщення вихідного органа верстата на основі паралельних кінематичних структур наведена на кресленні. На станині 1 розміщено три приводи подач 2 штанг 3 та два приводи подач 4 штанг 5. Всі штанги пов'язані шарнірно з вихідним органом, що складається з двох частин 6 і 7, поєднаних між собою шарніром 8 з двома ступенями свободи, причому штанги 3 пов'язані з однією частиною 6 вихідного органа, а штанги 5 - з іншою частиною 7 вихідного органа. Конструкція штанг 3 та їхніх шарнірів така, що забезпечує переміщення частини 6 вихідного органа по трьох лінійних координатах без зміни кутової орієнтації відносно станини. Переміщення штанг 5 визначатиме взаємне кутове положення частин 6 і 7 вихідного органа. Наявність шарніра 8 дозволяє здійснювати необхідний поворот частини 7 вихідного органа без зміни просторового положення його частини 6. Таким чином досягається функціональне розділення штанг на групи: штанги 3 визначають положення вихідного органа по лінійних координатах, а штанги 5 - по кутових координатах. Економічна ефективність пропонованого рішення забезпечується за рахунок підвищення рухомості вихідного органа, зменшення габаритів верстата та внаслідок функціонального розділення штанг на групи спрощує систему керування приводами подачі штанг. 35 Джерела інформації: 1. Крижанівський В.А., Кузнецов Ю.М., Валявський І.Α., Скляров Р.А. Технологічне обладнання з паралельною кінематикою: Навчальний посібник для ВНЗ. /Під. ред. Ю.М. Кузнєцова. - Кіровоград, 2004. - 449 с. 40 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 Привод переміщення вихідного органа верстата з п'ятьма штангами на основі паралельних кінематичних структур, що містить станину, механізми подачі п'яти штанг, які пов'язані з вихідним органом, який відрізняється тим, що вихідний орган складається з двох частин, поєднаних між собою шарніром з двома ступенями свободи, причому три штанги приєднується до однієї частини вихідного органа і мають конструкцію, що забезпечує переміщення цієї частини вихідного органа по трьох лінійних координатах без зміни кутової орієнтації відносно станини, а інші дві штанги приєднуються до іншої частини вихідного органа. 1 UA 114304 U Комп’ютерна верстка М. Мацело Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B23Q 5/00
Мітки: штангами, органа, привод, вихідного, п'ятьма, верстата, переміщення
Код посилання
<a href="https://ua.patents.su/4-114304-privod-peremishhennya-vikhidnogo-organa-verstata-z-pyatma-shtangami.html" target="_blank" rel="follow" title="База патентів України">Привод переміщення вихідного органа верстата з п’ятьма штангами</a>
Привід переміщення вихідного органа верстата з шістьма штангами
Номер патенту: 112828
Опубліковано: 26.12.2016
Автори: Аль-Ібрахімі Метак М.А., Кириченко Андрій Миколайович, Гречка Андрій Іванович
МПК: B23Q 5/00
Мітки: переміщення, верстата, привід, вихідного, шістьма, органа, штангами
Формула / Реферат:
Привід переміщення вихідного органа верстата з шістьма штангами на основі паралельних кінематичних структур, що містить станину, механізми подачі шести штанг, які пов'язані з вихідним органом, який відрізняється тим, що вихідний орган складається з двох частин, поєднаних між собою шарніром з трьома степенями вільності, причому три штанги приєднується до однієї частини вихідного органа і мають конструкцію, що забезпечує переміщення цієї...
Привод подачі шпинделя свердлильного верстата
Номер патенту: 110916
Опубліковано: 25.10.2016
Автори: Дідовець Вячеслав Євгенійович, Назаренко Євгеній Вікторович, Новік Микола Андрійович
МПК: B23B 39/14, B23B 41/00
Мітки: привод, подачі, шпинделя, свердлильного, верстата
Формула / Реферат:
Привод подачі шпинделя свердлильного верстата, що містить корпус і привод подачі гільзи зі шпинделем, який відрізняється тим, що механізм подачі гільзи зі шпинделем виконаний у вигляді прикріпленого до корпуса багатопоршневого з розрядними камерами і штоковою камерою зворотного руху поршнів пневмо- або гідроциліндра з цифровим кроком, вихідний шток якого жорстко прикріплений до гільзи зі шпинделем, а штокова камера циліндра з'єднана...
Сепаратор бурового верстата
Номер патенту: 101551
Опубліковано: 25.09.2015
Автор: Беліцький Сергій Миколайович
МПК: E21B 43/34, E21B 19/20
Мітки: верстата, бурового, сепаратор
Формула / Реферат:
1. Сепаратор бурового верстата, що містить нижню та верхню касети, закріплені на валу, кронштейни кріплення валу, який відрізняється тим, що нижня касета виконана із суцільного стального листа товщиною 120 мм, кронштейни кріплення валу сепаратора встановлені і розміщені горизонтально, касети мають отвори, розміщені через 24° один від одного, і розподільні відсікачі, виконані у вигляді підпружинених пластин і розміщені радіально між...
Спосіб переміщення бурового верстата у кар’єрі та пристрій для його реалізації
Номер патенту: 109327
Опубліковано: 10.08.2015
Автори: Денищенко Олександр Валерійович, Вигодін Михайло Олександрович, Пуга Андрій Андрійович, Зіль Валерій Васильович, Коптовець Олександр Миколайович
МПК: B60S 9/16, B60T 8/24, B60T 3/00, B62D 133/00
Мітки: кар'єрі, бурового, верстата, переміщення, спосіб, реалізації, пристрій
Формула / Реферат:
1. Спосіб переміщення бурового верстата у кар'єрі, що включає підготовку останнього до переміщення на нове робоче місце з встановленням бурової щогли у транспортне положення, роз'єднання системи управління бурового верстата з системою електричного живлення, відокремлення ходових редукторів та електричних двигунів від гусеничних рушіїв, з'єднання бурового верстата з тяговим бульдозером за допомогою жорсткого зчепу та його переміщення на нове...
Пристрій переміщення силового агрегату верстата
Номер патенту: 85497
Опубліковано: 26.01.2009
Автори: Карпусь Владислав Євгенович, Бочаров Віталій Борисович, Гаврилюк Юрій Романович, Івановська Ольга Володимирівна
МПК: B23Q 37/00
Мітки: силового, верстата, переміщення, агрегату, пристрій
Формула / Реферат:
Пристрій переміщення силового агрегату верстата, що складається з рухомої та нерухомої плит, який відрізняється тим, що містить напрямні вертикальні планки, закріплені до бічних поверхонь рухомої плити та притиснені до відповідних бічних поверхонь нерухомої плити з можливістю повздовжнього переміщення вздовж останньої згаданої рухомої плити, причому в плитах з дискретним кроком переналагодження силового агрегату виконані різьбові отвори під...
Попередній патент: Спосіб прогнозування перебігу панкреатиту за поліморфізмом гена cftr (delf508)
Наступний патент: Спосіб визначення продуктивності спірального класифікатора по пісках
Випадковий патент: Амортизатор електромагнітного вагоносповільнювача