Регульований кривошипно-повзунний механізм
Номер патенту: 114467
Опубліковано: 10.03.2017
Формула / Реферат
Регульований кривошипно-повзунний механізм, що містить корпус, збірний кривошип, шатун, повзун, рухомі опори кривошипа, дві гвинтові частини з протилежними нарізками для їх переміщення, а також приводи для обертання кривошипа і гвинтових частин, який відрізняється тим, що гвинтові частини виконані у вигляді окремих нарізних стрижнів, а привод обертання розміщений між зазначеними стрижнями.
Текст
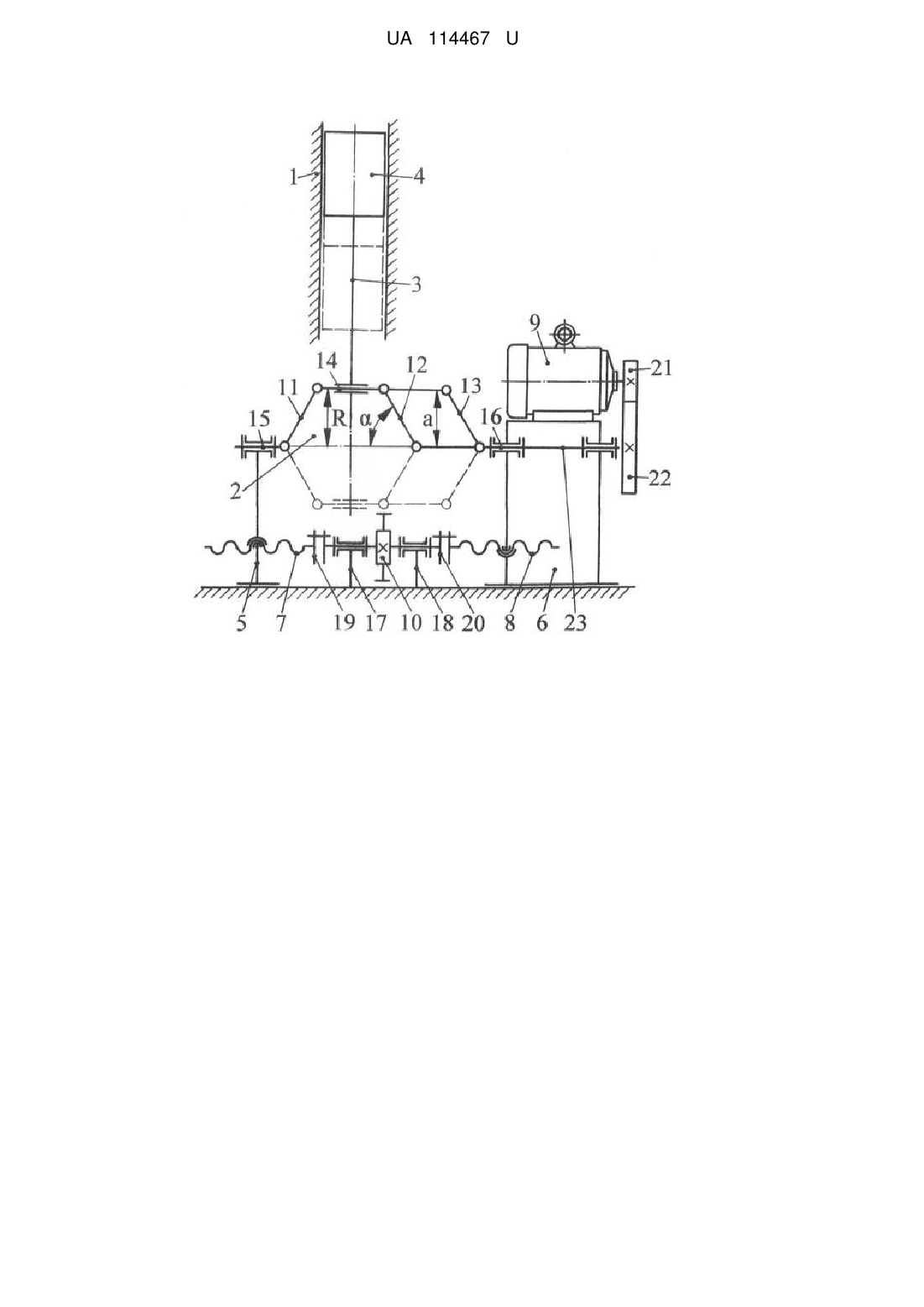
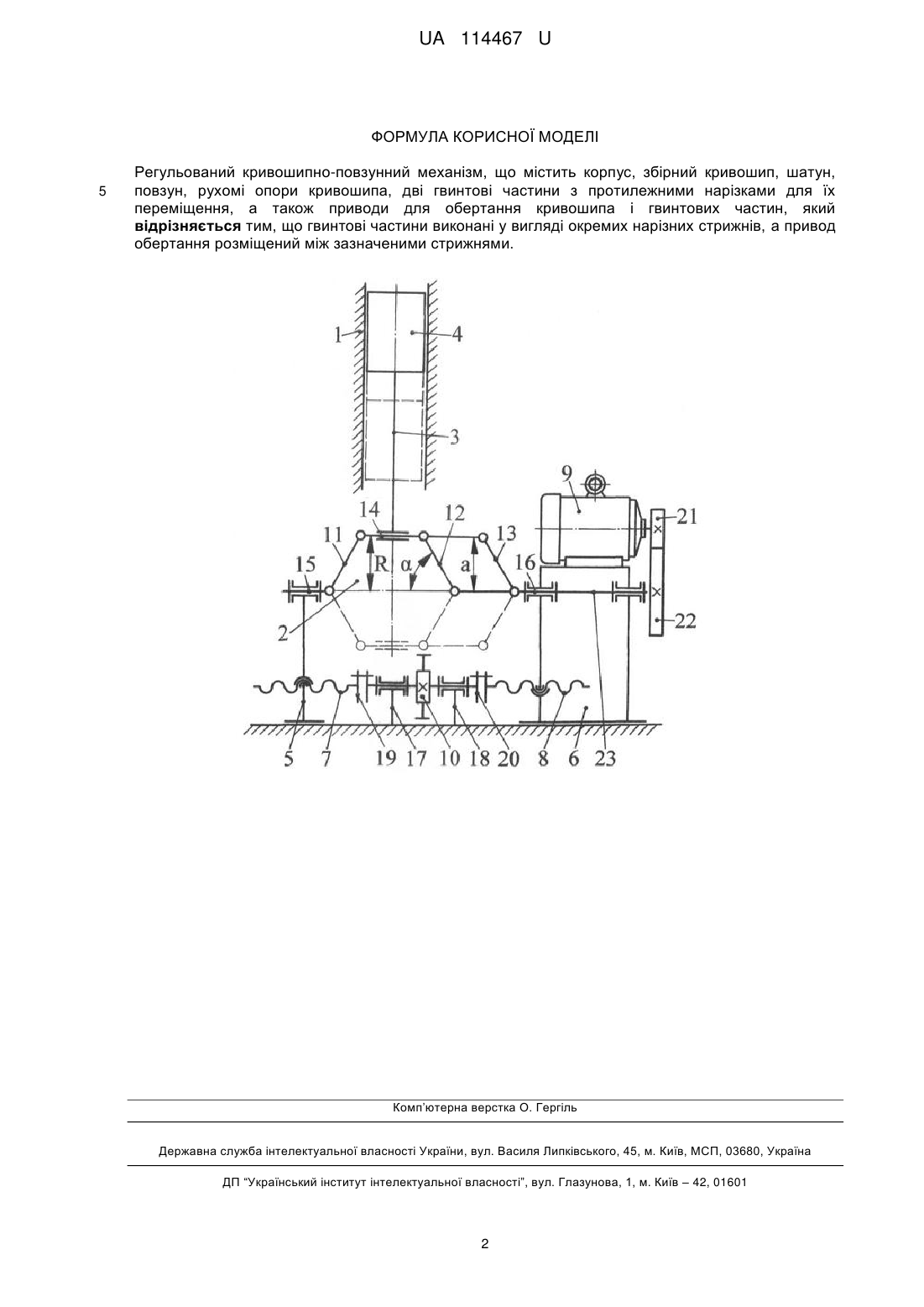
Реферат: UA 114467 U UA 114467 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до машинобудування і стосується кривошипно-повзунних механізмів. Відомий кривошипно-повзунний механізм, який містить корпус, жорсткий кривошип, шатун, повзун і привод обертання кривошипа [1]. Недоліком цього механізму є те, що він не забезпечує плавне регулювання довжини ходу повзуна, оскільки жорсткий кривошип має постійний радіус з'єднання з шатуном. Найбільш близьким аналогом до корисної моделі за технічною суттю і ефектом, що досягається, є регульований кривошипно-повзунний механізм, який містить корпус, збірний кривошип, шатун, повзун, рухомі опори кривошипа, дві гвинтові частини з протилежними нарізками для їх переміщення, а також приводи обертання кривошипа і гвинтових частин [2]. Вказаний механізм забезпечує плавне регулювання довжини ходу повзуна завдяки змінному радіусу з'єднання збірного кривошипа з шатуном, але не забезпечує зменшення габаритного розміру вздовж осі розташування обох гвинтових частин, оскільки привод їх обертання займає бокове розміщення відносно однієї із опор кривошипа, що є основним його недоліком. В основу корисної моделі поставлена задача зменшення габаритного розміру механізму вздовж осі розташування обох гвинтових частин шляхом виключення бокового розміщення привода їх обертання відносно однієї із опор кривошипа. Поставлена задача вирішується тим, що в регульованому кривошипно-повзунному механізмі, який містить корпус, збірний кривошип, шатун, повзун, рухомі опори кривошипа, дві гвинтові частини з протилежними нарізками для їх переміщення, а також приводи обертання кривошипа і гвинтових частин, згідно з корисною моделлю, новим є те, що гвинтові частини виконані у вигляді окремих нарізних стрижнів, а привод обертання розміщений між зазначеними стрижнями. Вказані відмітні ознаки виключають бокове розміщення привода обертання обох гвинтових частин відносно однієї із опор кривошипа, що відповідно забезпечить зменшення габаритного розміру механізму вздовж осі розташування зазначених частин. На кресленні схематично показаний регульований кривошипно-повзунний механізм: де 1 корпус; 2 - збірний кривошип; 3 - шатун; 4 - повзун; 5, 6 - рухомі опори; 7, 8 - гвинтові частини; 9 привод кривошипа; 10 - привод гвинтових частин; 11, 12, 13 - бокові стрижні; 14 - шатунна шийка; 15, 16 - опорні шийки; 17, 18 - нерухомі опори; 19, 20 - жорсткі муфти; 21 - шестірня; 22 зубчасте колесо; 23 - вал. Регульований кривошипно-повзунний механізм містить корпус 1, збірний кривошип 2, шатун 3, повзун 4, рухомі опори 5, 6 кривошипа 2, дві гвинтові частини 7, 8 з протилежними нарізками для їх переміщення, а також приводи 9, 10 обертання кривошипа 2 і гвинтових частин 7, 8. Крім цього гвинтові частини 7, 8 виконані у вигляді окремих нарізних стрижнів, а привод обертання 10 розміщений між зазначеними стрижнями. Збірний кривошип 2 виконаний із шарнірно з'єднаних трьома боковими стрижнями 11, 12, 13 шатунної 14 і опорних 15, 16 шийок. Бокові стрижні 12, 13 кривошипа 2 разом з його шатунною 14 і опорною 16 шийками утворюють шарнірний паралелограм із змінним кутом нахилу стрижнів 12, 13 до осі обертання кривошипа 2 та відстані а між його шатунною 14 і опорною 16 шийками (радіусу R кривошипа 2). Привод 10 обох гвинтових частин 7, 8 виконаний, наприклад, ручним у вигляді воротка і встановлений своїми кінцями на двох нерухомих опорах 17, 18. З'єднання такого привода 10 з обома гвинтовими частинами 7, 8 у вигляді нарізних стрижнів здійснюється жорсткими муфтами 19, 20. При роботі механізму обертальний рух від привода 9 через шестірню 21 і зубчасте колесо 22 передається на вал 23 опорної шийки 16 кривошипа 2, його стрижні 12, 13, шатунну шийку 14, а також від неї на стрижень 11 кривошипа 2 та його опорну шийку 15. Від шатунної шийки 14 кривошипа 2 його рух передається на шатун 3 і повзун 4, здійснюючий прямолінійний зворотнопоступальний рух. Разом з цим обертальний рух привода 10 обох гвинтових частин 7, 8 забезпечує плавне регулювання відстані між рухомими опорами 5, 6 кривошипа 2, а також довжини ходу повзуна 4. Розміщення привода обертання гвинтових частин між ними забезпечить зменшення габаритного розміру механізму вздовж осі розташування зазначених частин. Джерела інформації: 1. Прикладная механика / Т.В. Путята, Н.С. Можаровский, Н.С. Соколов, Ф.П. Гордийко. - К.: Вища школа, 1977. - С. 282, фиг. 3.15. 2. А. с. СССР № 1073516, МПК F16Н 21/20. Регулируемый кривошипно-ползунный механизм / А.Д. Корнешов. - Опубл. 15.02.1984. 60 1 UA 114467 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 Регульований кривошипно-повзунний механізм, що містить корпус, збірний кривошип, шатун, повзун, рухомі опори кривошипа, дві гвинтові частини з протилежними нарізками для їх переміщення, а також приводи для обертання кривошипа і гвинтових частин, який відрізняється тим, що гвинтові частини виконані у вигляді окремих нарізних стрижнів, а привод обертання розміщений між зазначеними стрижнями. Комп’ютерна верстка О. Гергіль Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 2
ДивитисяДодаткова інформація
МПК / Мітки
МПК: F16H 21/20
Мітки: регульованій, кривошипно-повзунний, механізм
Код посилання
<a href="https://ua.patents.su/4-114467-regulovanijj-krivoshipno-povzunnijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Регульований кривошипно-повзунний механізм</a>
Кривошипно-повзунний механізм
Номер патенту: 114466
Опубліковано: 10.03.2017
Автори: Гузенко Юрій Михайлович, Кірієнко Олена Анатоліївна
МПК: F16H 21/20
Мітки: механізм, кривошипно-повзунний
Формула / Реферат:
Кривошипно-повзунний механізм, що містить корпус, пружний кривошип, шатун, повзун, дві пересувні опори з віссю та валом для шарнірного з'єднання з кінцями кривошипа, а також привод його обертання і гвинт для переміщення зазначених опор, який відрізняється тим, що вісь та вал пересувних опор з'єднані з кінцями кривошипа шарнірами Гука (карданними шарнірами).
Кривошипно-кулачково-повзунний механізм

Номер патенту: 99677
Опубліковано: 10.09.2012
Автори: Полюдов Олександр Миколаєвич, Регей Іван Іванович, Кузнєцов Владислав Олександрович
МПК: F16H 53/00
Мітки: кривошипно-кулачково-повзунний, механізм
Формула / Реферат:
Кривошипно-кулачково-повзунний механізм, що включає ланку, яка рухається навколо нерухомої осі, проміжну ланку, ролик, що ковзає та перекочується в нерухомому профільованому пазу, кулісу, яка рухається навколо нерухомої осі, повзун, який відрізняється тим, що ланкою є кривошип, проміжною ланкою - шарнірно приєднане до кривошипа двоплече коромисло, до одного боку якого закріплений ролик, а до другого - вісь каменя, який ковзає по кулісі,...
Кривошипно-повзунний механізм привода ножа з регульованим ходом
Номер патенту: 66983
Опубліковано: 25.01.2012
Автори: Лишко Михайло Григорович, Волянський Михайло Станіславович, Погорілець Олександр Миколайович
МПК: A01D 37/00, A01D 34/01
Мітки: привода, механізм, кривошипно-повзунний, ходом, ножа, регульованим
Формула / Реферат:
Кривошипно-повзунний механізм привода ножа з регульованим ходом, що містить кривошип, шатун, крейцкопф і ніж, який здійснює зворотно-поступальний прямолінійний рух, який відрізняється тим, що для регулювання ходу ножа радіус кривошипа виконаний регульованим від максимального до мінімального значення поворотом кривошипа з пальцем на 180° навколо своєї геометричної осі з наступною його жорсткою фіксацією до ведучого диска або поворотом...
Кривошипно-повзунний механізм

Номер патенту: 37426
Опубліковано: 25.11.2008
Автор: Маца Роман Степанович
МПК: F16F 15/22
Мітки: механізм, кривошипно-повзунний
Формула / Реферат:
Кривошипно-повзунний механізм, який складається з кривошипа і повзуна, який відрізняється тим, що він додатково містить кулісу, яка через кулісний камінь контактує з кривошипом та одним кінцем cпирається на повзун, а другим через ролик обкочується по синтезованому кулачку, який жорстко з'єднаний з кривошипом.
Кривошипно-повзунний п’ятиланковий механізм голки
Номер патенту: 68981
Опубліковано: 16.08.2004
Автори: Терещенко Олександр Пилипович, Капустенський Петро Гнатович, Шевченко Ігор Аркадійович
МПК: D05B 1/00
Мітки: кривошипно-повзунний, механізм, голки, п'ятиланковий
Формула / Реферат:
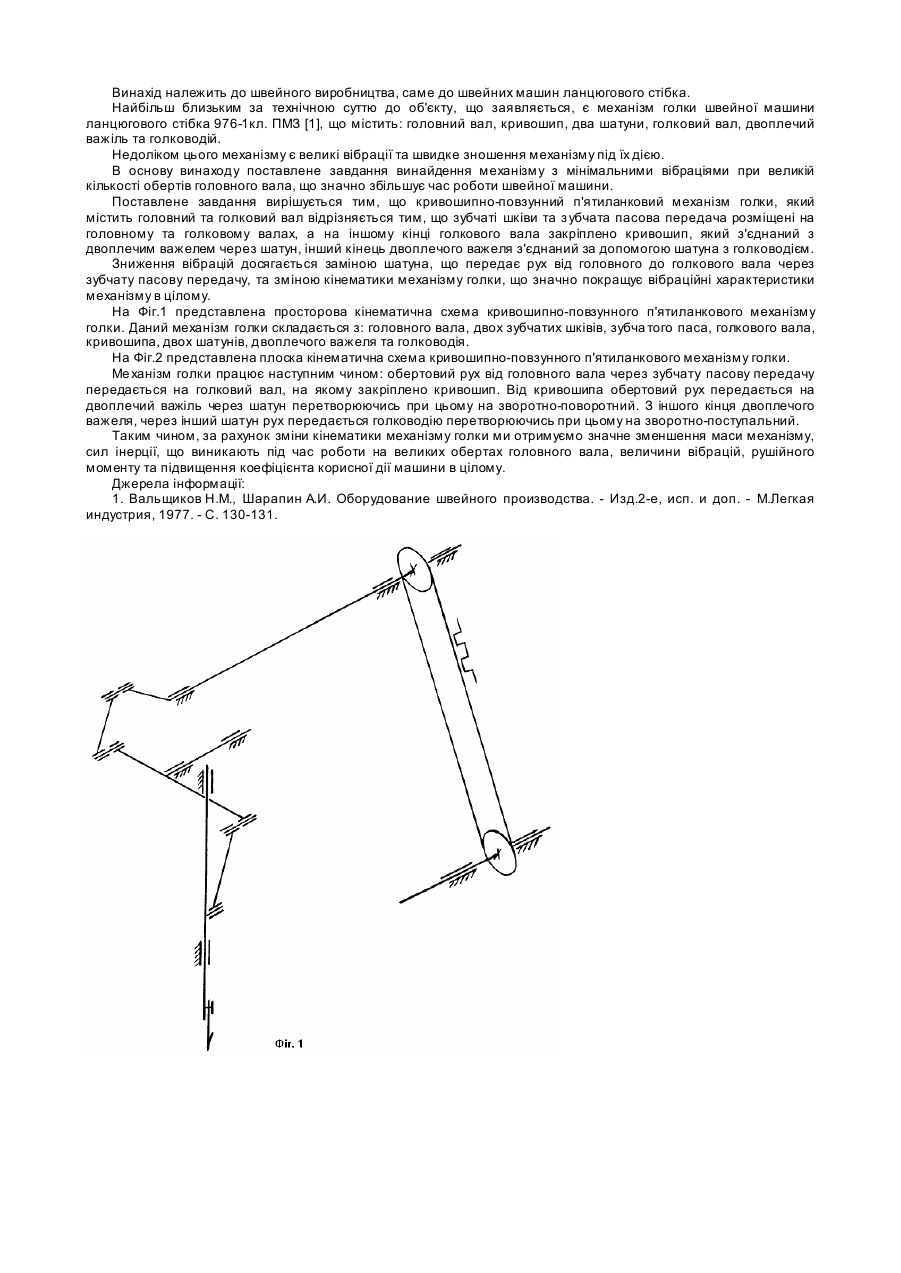
Кривошипно-повзунний п‘ятиланковий механізм голки, який містить головний та голковий вал, який відрізняється тим, що зубчаті шківи та зубчата пасова передача розміщені на головному та голковому валах, а на іншому кінці голкового вала закріплено кривошип, який з'єднаний з двоплечим важелем через шатун, інший кінець двоплечого важеля з'єднаний за допомогою шатуна з голководієм.
Попередній патент: Кривошипно-повзунний механізм
Випадковий патент: Спосіб термічної обробки металевої стрічки