Пристрій для підтримання заданого співвідношення швидкостей в багатодвигунному електроприводі
Номер патенту: 11497
Опубліковано: 25.12.1996
Автори: Бойчук Леонід Михайлович, Охмакевич Василь Федорович, Воронецький Ігор Якович
Формула / Реферат
1 .Устройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе по авт.св. № 746853, отличающееся тем, что, с целью повышения быстродействия ее качества регулирования за счет построения переменной структуры управления, в него дополнительно введены блок коммутации и блок управления, входы которого подключены к выходам блоков формирования ошибок, выход - к управляющему входу блока коммутации, входы которого соединены с выходом блока варьирования скоростей, а выходы подключены к входам блоков формирования ускорений двигателей. 2.Устройство по п.1, отличающееся тем, что блок управления содержит определители модуля ошибок регулирования, количество которых равно числу блоков формирования ошибок, и сумматор-компаратор, причем выход каждого определителя модуля ошибок регулирования соединен с входом гумматора-компаратора.
Текст
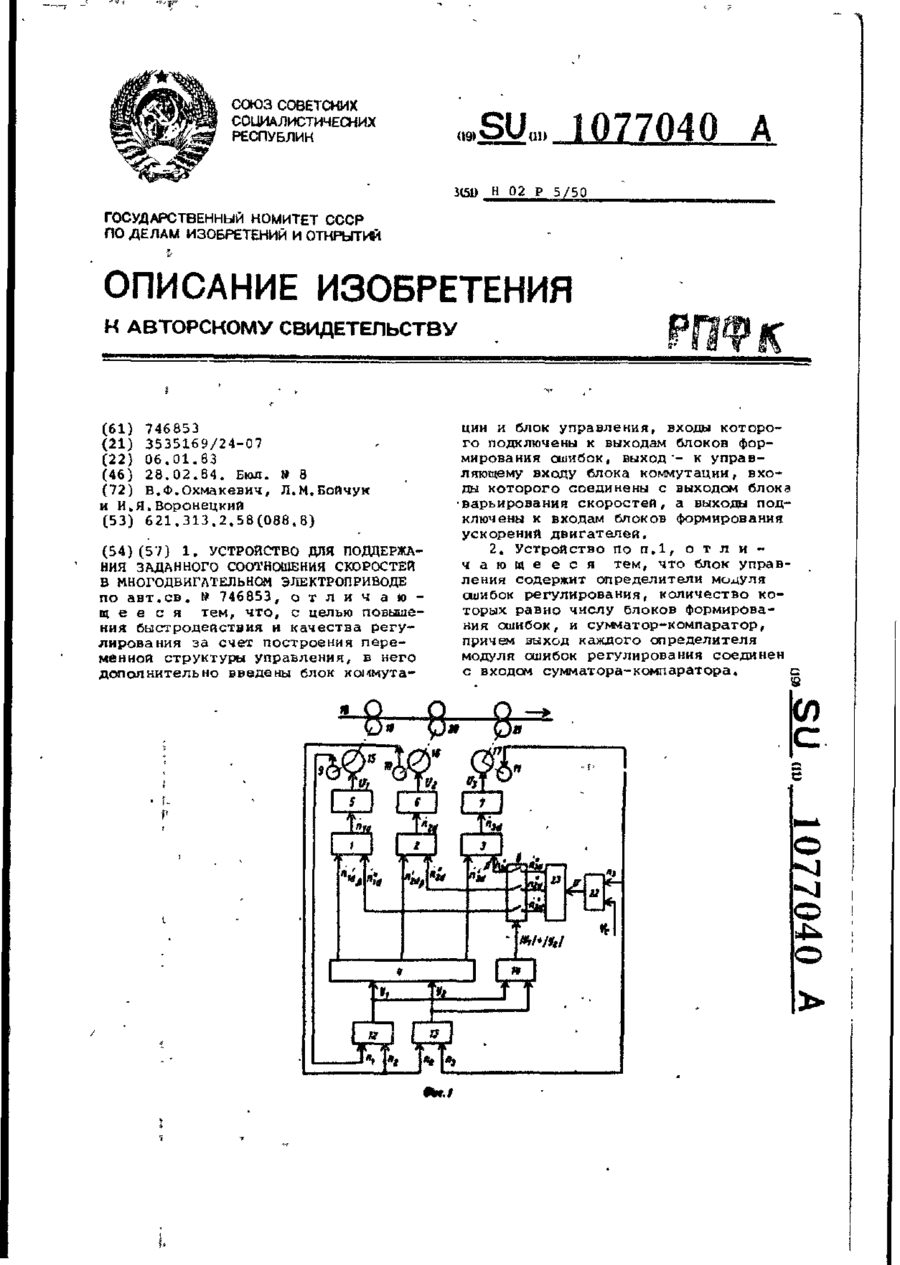
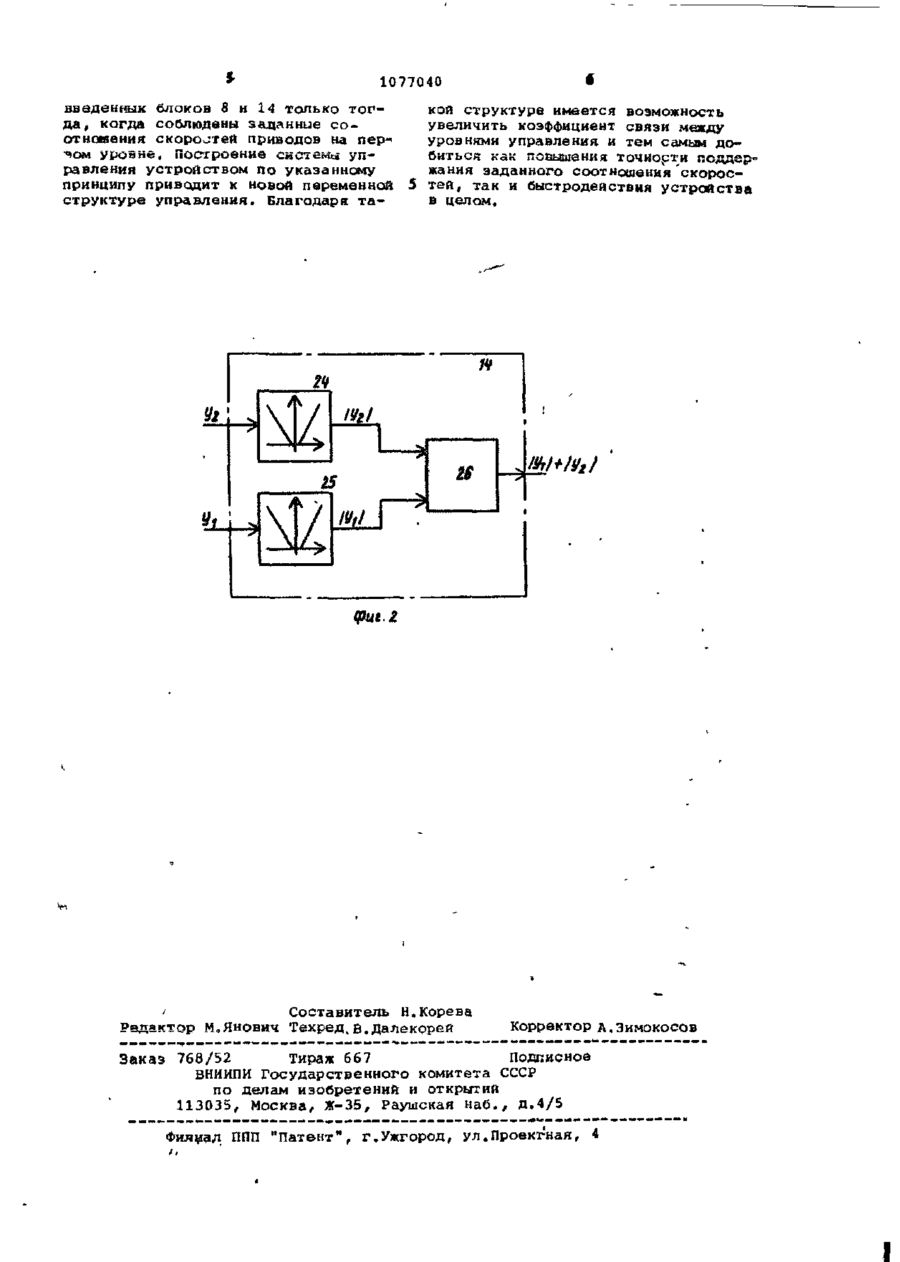
СОЮЗ СОВЕТСНИХ СОЦИАЛИСТИЧЕСКИХ РЕСПУБЛИН 5(51) Н 02 Р 5/50 ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССР ПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ (61) 746853 (21) 3 5 3 5 1 6 9 / 2 4 - 0 7 (22) 0 6 . 0 1 . 8 3 (46) 2 8 . 0 2 . 8 4 . Бюл. » 8 £72) В.Ф.Охмакевич, Л.М.Бойчук и И,Я.Воронецкий (53) 6 2 1 . 3 1 3 , 2 . 5 8 ( 0 8 8 , 8 ) ( 5 4 ) ( 5 7 ) 1 . УСТРОЙСТВО ДЛЯ ПОДДЕРЖАНИЯ ЗАДАННОГО СООТНОШЕНИЯ СКОРОСТЕЙ В МНОГОДВИГЛТЕЛЬНОМ ЭЛЕКТРОПРИВОДЕ по а в т . с в . № 7 4 6 8 5 3 , о т л и ч а ю • щ е е с я т е м , ч т о , с целью повышения быстродействия и к а ч е с т в а р е г у л и р о в а н и я за счет п о с т р о е н и я п е р е менной структуры у п р а в л е н и я , в него д о п о л н и т е л ь н о введены блок коммута ции и блок у п р а в л е н и я , входы к о т о р о го подключены к выходам блоков формирования ошибок, в ы х о д ' - к у п р а в ляющему входу блока коммутации, в х о ды к о т о р о г о соединены с выходом блока •варьирования с к о р о с т е й , а выходы подключены к входам блоков формирования ускорений д в и г а т е л е й , 2, Устройство по п . 1 , о т л и ч а ю щ е е с я т е м , ч т о блок у п р а в ления содержит определители модуля сшибок р е г у л и р о в а н и я , к о л и ч е с т в о к о торых р а в н о числу блоков формирования ошибок, и сумматор-компаратор, причем выход каждого о п р е д е л и т е л я модуля ошибок регулирования соединен с с входом с у м м а т о р а - к о м п а р а т о р а . п (Л с о о 1077040 Изобретение относится к электрогагелей, причем регуляторы двигатетехнике и может быть использовано в лей подключены через блоки формиросистемах автоматизации технологичесвания ускорений к блоку стабилизаких процессов, например при регулиции соотношения скоростей и к блоку . ровании соотношения скорости в мноварьирования скоростей, а блок стагодвигательных линиях для обработки 5 билизации соотношения скоростей соепошшериых изделий, состоящих из отдинен с блоками формирования ошибок, дельных технологических участков. два входа каждого из которых подключены к датчикам скоростей смежных По основному а в т . с в . № 746853 и з двигателей, кроме того, датчик сковестно устройство для поддержания, заданного соотношения скоростей в ІО рости ведущего двигателя соединен многодвигательном электроприводе, с входом блока задания и стабилизасодержащее датчики скоростей, регуции скорости ведущего двигателя, ляторы двигателей, блок задания и выход которого соединен с входом стабилизации скорости ведущего двиблока варьирования скоростей, дополгателя, блоки формирования ускоре15 нительно введены блок коммутации и ний по числу двигателей, блок варьиблок управления, входы которого подрования скоростей, блок стабилизации ключены к выходам блоков формировасоотношения скоростей и блоки форминия ошибок, а выход - к управляющему рования ошибок по числу ведомых входу блока коммутации, входы котодвигателей, причем регуляторы дви2 рого соединены с выходом блока варьиQ гателей подключены через блоки формирования скоростей, а выходы подклюрования ускорений к блоку стабилизачены к входам блоков формирования ции соотношения скоростей и к блоку ускорений двигателей. варьирования скоростей, а блок ста** Кроме того, блок управления собилизации соотношения скоростей сое- 2^ держит определители модуля ошибок линен с блоками Формирования ошибок, регулирования, количество которых два входа каждого из которых подклю. равно числу блоков формирования ошичены к датчикам скоростей смежных бок, и сумматор-компаратор, причем двигателей, кроме того, датчик сковыход каждого определителя модуля рости ведущего двигателя соединен с ошибки регулирования соединен с вховходом блока задания и стабилизации ^ " дом сумматора-компаратора. скорости ведущего двигателя, выход На фиг.1 изображена блок-схема которого соединен с входом блока устройства; на фиг.2 - функциональварьирования скоростей. ная схема блока управления. Устройство выполнено по двухуров- 35 Устройство содержит блоки 1, 2 и невому принципу управления. На пер3 формирования ускорений, блок 4 вом уровне управления осуществляется стабилизации соотношения скоростей, поддержание заданного соотношения регуляторы 5-7 двигателей, входы коскоростей приводов, а на втором торых подключены через блоки 1, 2 и уровне - стабилизация скорости ведулп 3 формирования ускорений к блоку 4 • щего привода. Оба уровня управления стабилизации соотношения скоростей при работе устройства функционируют .и 'к блоку 8 коммутации. Датчики 9, одновременно. Повышение точности под10 и 11 скоростей попарно подключедержания заданного соотношения сконы к входам блоков 12 и 13 формироростей в таких устройствах произвования ошибок, выходы которых соедидится путем уменьшения коэффициента 5 связи между первым и вторым уровнями ** йены с входами блока 4 стабилизации соотношения скоростей и блока 14 управления . Это приводит к понижеуправления. Выходы регуляторов 5, нию быстродействия при стабилизации б и 7 подключены к двигателям 15, •скорости ведущего привода. 16 и 17, которые транспортируют обЦель изобретения - повышение быст- 50 рабатываемый гибкий материал 18 родействия и качества регулирования посредством тянущих пар валков 19, за счет построения переменной струк20 и 2 1 . Двигатель 17 принят в катуры управления. , честве ведущего привода. Датчик 11 скорости соединен с входом блока 22 ' Указанная ц&пь достигается тем, 55 задания и стабилизации скорости что в устройство для поддержания ведущего двигателя. Выход блока 22 заданного соотношения скоростей в посредством блока 23 варьирования многодвигательном электроприводе, скоростей подключен к блоку 8 комсодержащее датчики скоростей, регумутации. Блок 14 управления на. вяоляторы двигателей, блок задания и стабилизации скорости ведущего двига~ 60 де "содержит определители 24 и 25 модуля ошибок регулирования, количесттеЛя, блоки формирования ускорений во которых равно числу блоков 12 и 13 по числу двигателей, блок варьироваформирования ошибок,и на выходе ния скоростей, блок стабилизации сумматор-компаратор 26. Выход кахсдосоотношения скоростей и блоки формирования ошибок по числу ведомых дви- Й5 го определителїя 24 и 25 модуля ошиб 1077040 ки регулирования соединен с входом сумматор-компаратора 26, Устройство работает следующим образом. Перед включением питания устройства в блоках 12 и 13 формирования сшибок регулирования устанавливают требуемое COOTHOL_ ние скоростей, Затем включают питание устройства и сигналом Фо задают скорость приводам 1 5 , 16 и 1 7 . Так как до этого скорости всех приводов были равны нулю, т о ошибки регулирования v^ и -у соотношения скоростей на выходе блоков 12 и 13 также равны нулю. Управляющий сигнал U с блока 22 поступа- *с ет на блок 23 варьирования скоростей , который вырабатывает сигналы, пропорциональные требуемым ускорениям nijj , rw d и n'j d двигателей 1 5 , 16 и 17. Эти сигналы необходимы _ для поддержания заданных соотноше-ний скоростей двигателей 15 и 16 и ведущего двигателя 17. Если ошибки ^ и Y2 равны нулю, то регулирования 2 сигналы управления второго уровня и с БЫХ "•id ' " i d ^ 3d ° Д а блока 23 поступают через блок 8 коммутации на блоки 1, 2 и 3 формирования ускорений двигателей. Последние вырабатывают требуемые сигналы ускорений 30 "id ' '2d ' n 3d. И п о д - а ю т и х через регуляторы 5, 6 и 7 на двигатели 1 5 , 16 и 1 7 , которые осуществляют разгон приводов до заданной скорости у с . Если разгон двигателей осуществляется несогласованно (не выдержи- 35 вается заданное соотношение скорост е й ) , т о и з - з а разности сигналов датчиков 9і, 10 и 11 скорости на' выходе блоков 12 и 13 формирования ошибки появляются сигналы Y,, и ~ї2 • Сигна- 40 лы Y-i т Y2 поступают на входы блока 4 стабилизации соотношения скоростей, который вырабатывает сигналы 'управления первого уровнч n ^ , г\^ и ^За і пропорциональные ускорениям двигателей и необходимые для достиже ния требуемого соотношения скоростей. Далее эти сигналы поступают На блоки 1, 2 и 3 формирования ускорений. Кроме э т о г о , сигналы Ул и Y2 подаются на вход блока 14 управления. Устройства 24 и 25 блока 14 опре-1 деляют модули tY, I , 1Y21 сигналов ошибок регулирования, которые после суммирования и усиления в сумматорекомпараторе 26 поступают с выхода блока 14 на управляющий вход блока 8 коммутации. Последний прерывает сигналы n " d , п " и п ^ , поступающие с блока 23 на входы блоков 1, &® 2 и 3 формирования ускорения. В итоге блоки 1, 2 и 3 формируют сигналы, необходимые только для поддержания требуемого соотношения скоростей в процессе разгона двигателей 15, 16 и 65 •*-* 17, т . е . разгон приводов согласовы- ' в а е т с я . Если заданное соотношение скоростей достигнуто, выходной сигнал блока 14 управления равен нулю. При этом блок 8 коммутации подключает сигналы управления квторогом уроввх ня n " d , n 2a ' n соот ноше ние равно единице, то и скорость остальных приводов также стремится к нулю. Остановка приводов производится путем уменьшения сигнала Ч*с до нуля. При этом работают функциональные блоки 1-7, 12 и 1 3 , поддерживая з а данное соотношение скоростей до полной остановки приводов. Таким образом, работа предлагаемого устройства основана на двухуровневом принципе регулирования. На первом уровне с помощью блоков 1-7,12 и 13 осуществляется установка и поддержание в процессе работы заданного соотношения скоростей смежных привод о в . Это обстоятельство чрезвычайно важно при разгоне и торможении многодвигательного привода. При этом двигатели разгоняются и тормозятся с требуемым ускорением, поддерживая заданные соотношения скоростей между собой. Так как число полученных соотношений всегда меньше, чем число регулируемых приводов, то имеется возможность изменять величину скорости веек приводов, не изменяя их соотношений. Изменение величины скоростей и их стабилизацию производят с помощью управления второго уровня. Посредством блоков 1-3, 5-7, 22 и 23 скорости всех двигателей у с т а навливаются в заданном соотношении к скорости ведущего привода. Первый и второй уровни управления соподчинены по условию временного приоритета. Требуемый процесс отработки задания на втором уровне р е а лизуется с помощью дополнительно 1077040 введенных блоков 8 и 14 только т о г кой структуре имеется возможность д а , когда соблюдены заданные с о . увеличить коэффициент связи между отношения скоростей приводов на перуровнями управления и тем самым довом уровне, Построение системы упбиться как повышения точкорти псддер* равления устройством по указанному жания заданного соотношения скороспринципу приводит к новой переменной 5 тай, так и быстродействия устройства структуре управления. Благодаря т а в целом. фиг. 2 ' Составитель Н,Корева Редактор М.Янович Техред.в.Далекорей Корректор А.Зимокосов З а к а з 768/52 Тираж 667 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж-35, Раушская н а б . , д . 4 / 5 Филиал ППП " П а т е н т " , г.Ужгород, ул.Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice to maintain the set ratio of speeds in a multimotor drive
Автори англійськоюOkhmakevych Vasyl Fedorovych, Boichuk Leonid Mykhailovych, Voronetskyi Ihor Yakovych
Назва патенту російськоюУстройство для поддержания заданного соотношения скоростей в многодвигательном электроприводе
Автори російськоюОхмакевич Василий Федорович, Бойчук Леонид Михайлович, Воронецкий Игорь Яковлевич
МПК / Мітки
МПК: H02P 5/46
Мітки: підтримання, пристрій, багатодвигунному, електроприводі, співвідношення, заданого, швидкостей
Код посилання
<a href="https://ua.patents.su/4-11497-pristrijj-dlya-pidtrimannya-zadanogo-spivvidnoshennya-shvidkostejj-v-bagatodvigunnomu-elektroprivodi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для підтримання заданого співвідношення швидкостей в багатодвигунному електроприводі</a>
Спосіб автоматичного регулювання співвідношення паливо-повітря
Номер патенту: 1633
Опубліковано: 25.10.1994
Автори: Зінченко Іван Миколайович, Кульпа Едуард Миколайович
МПК: F23N 1/02
Мітки: спосіб, співвідношення, автоматичного, регулювання, паливо-повітря
Формула / Реферат:
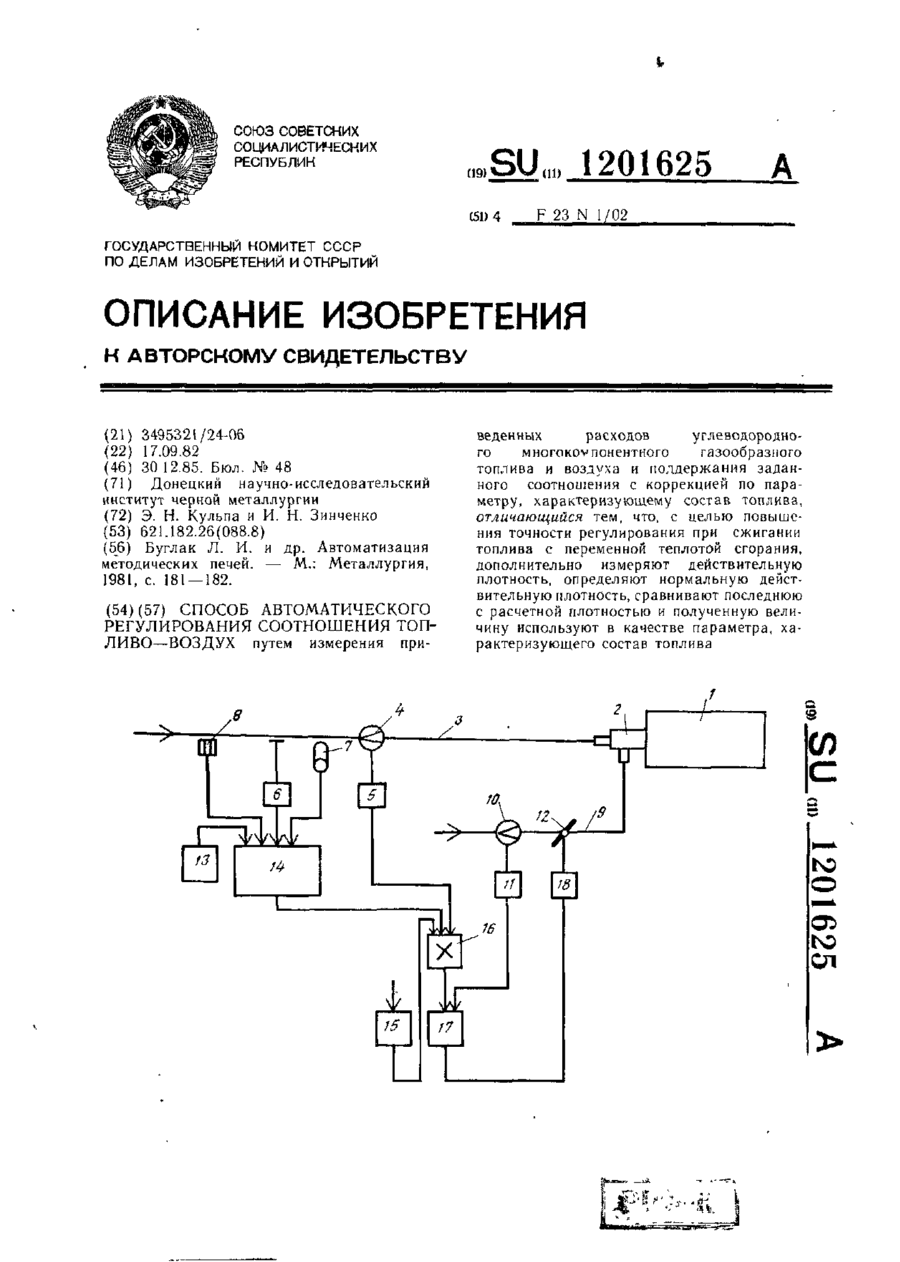
Способ автоматического регулирования соотношения топливо — воздух путем измерения приведенных расходов углеводородного многокомпонентного газообразного топлива и воздуха и поддержания заданного соотношения с коррекцией по параметру, характеризующему состав топлива, отличающийся тем, что, с целью повышения точности регулирования при сжигании топлива с переменной теплотой сгорания, дополнительно измеряют действительную плотность, определяют...
Пристрій для заморожування біоматеріалів
Номер патенту: 6462
Опубліковано: 29.12.1994
Автори: Резников Віктор Іванович, Дрижерук Едуард Федорович
МПК: F25D 3/10
Мітки: пристрій, заморожування, біоматеріалів
Формула / Реферат:
(57) Устройство для замораживания биоматериалов, содержащее камеру замораживания с датчиком температуры, подключенным к первому входу первого блока сравнения, второй вход которого соединен с выходом, линейного задатчика температуры, подключенного входом к выходу задатчика начальной температуры, а также дифференцирующий блок, вход которого соединен с датчиком температуры, а выход со вторым блоком сравнения, генератор пилообразного напряжения,...
Спосіб автоматичного регулювання співвідношення паливо-повітря
Номер патенту: 1632
Опубліковано: 25.10.1994
Автори: Кульпа Едуард Миколайович, Зінченко Іван Миколайович
МПК: F23N 1/02
Мітки: автоматичного, регулювання, спосіб, співвідношення, паливо-повітря
Формула / Реферат:
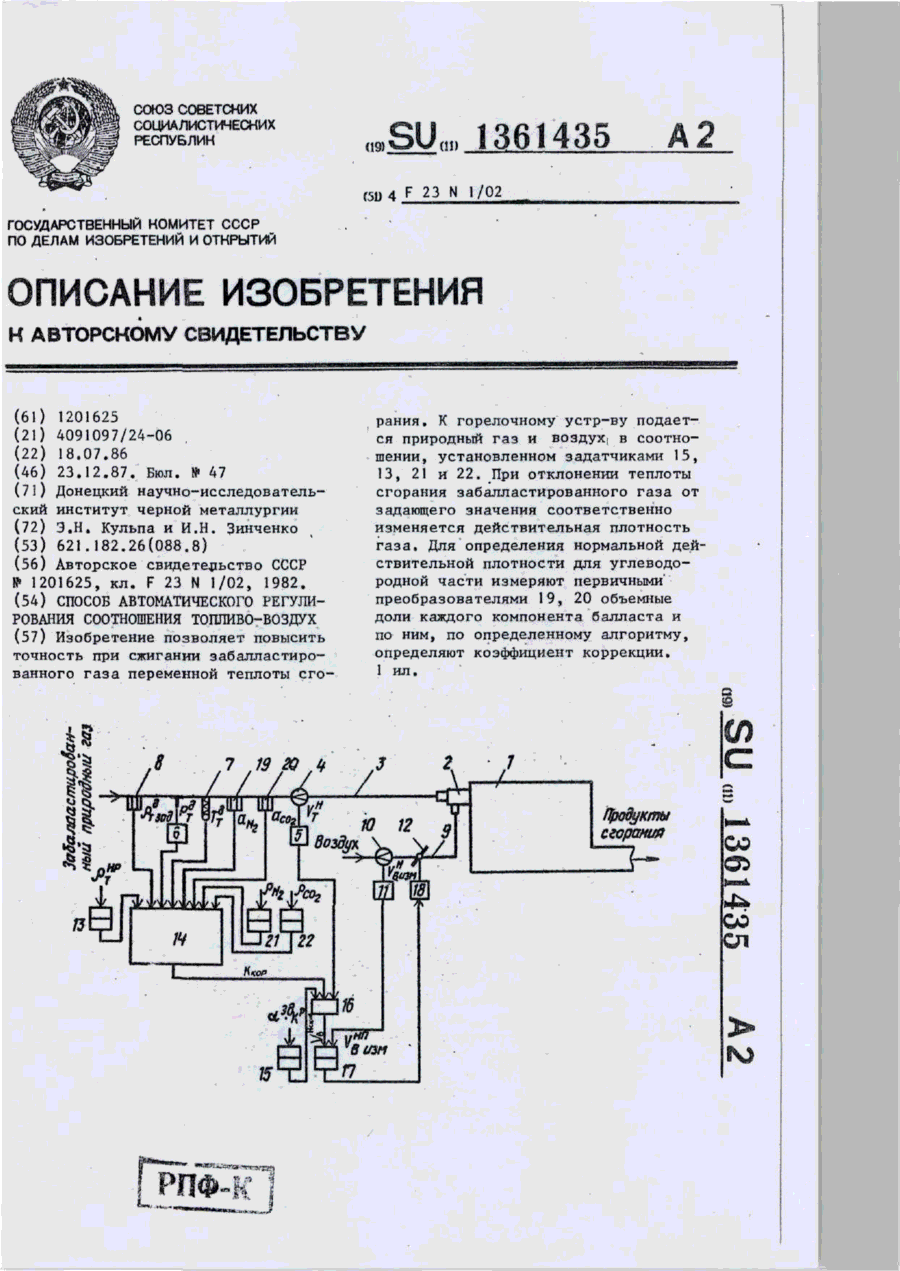
Способ автоматического регулирования соотношения топливо — воздух по авт.св. № 1201625, отличающийся тем, что, с целью повышения точности при сжигании забалластированного газа переменной теплоты сгорания, дополнительно измеряют объемное содержание каждого компонента балласта, а нормальную действительную плотность определяют для углеводородной части газа.
Спосіб діагностування насосів
Номер патенту: 9242
Опубліковано: 30.09.1996
Автори: Рюмшин Микола Олександрович, Діденко Віктор Мусіевич, Тертишна Олена Тимофіївна, Богаенко Іван Миколайович
МПК: F04D 15/00
Мітки: спосіб, насосів, діагностування
Формула / Реферат:
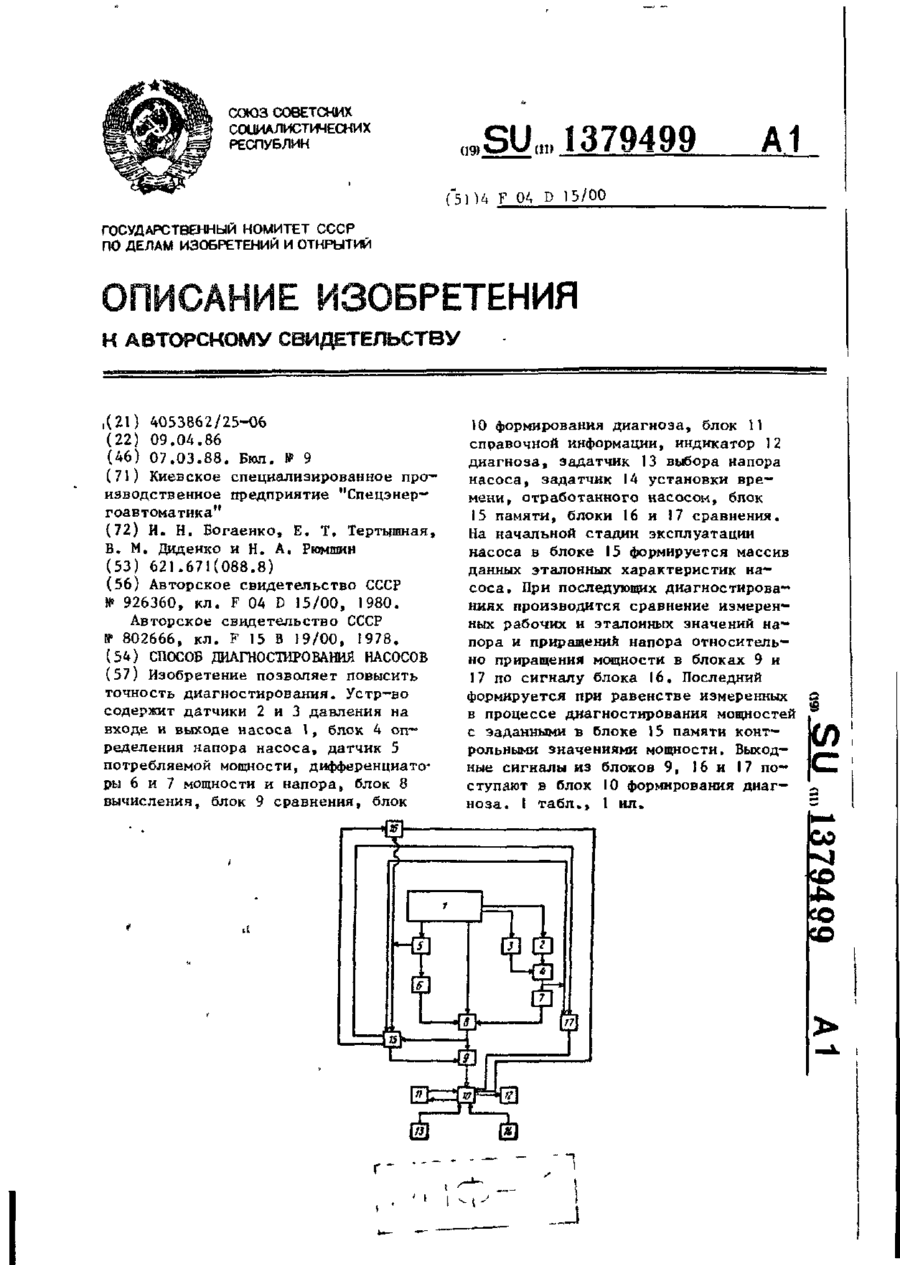
Способ диагностирования насосов, заключающийся в измерении напора и мощности, определении по измеренным значениям параметра диагностирования и сравнении его с заданным, отличающийся тем, что, с целью повышения точности, в качестве параметров диагностирования используют производную напора по мощности и напор.
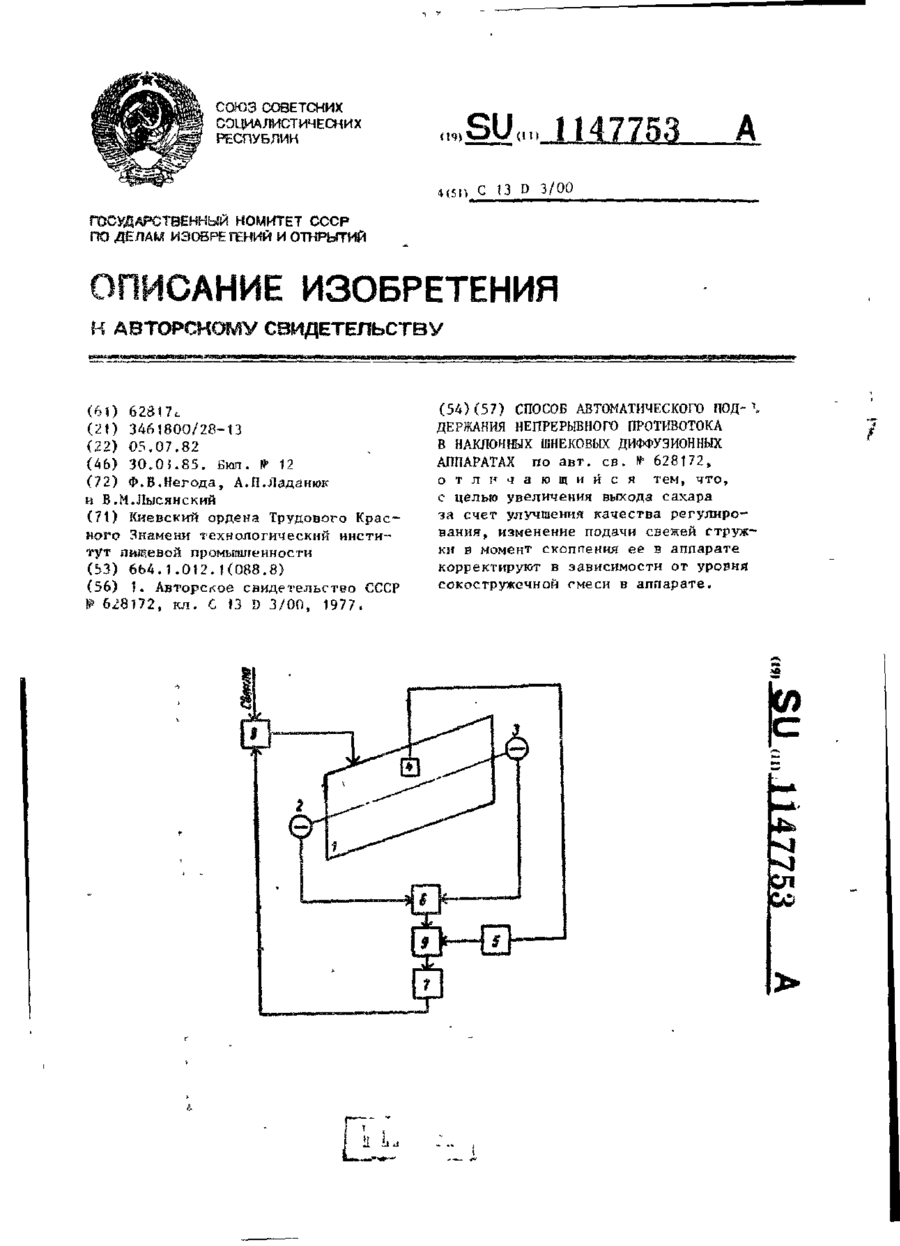
Спосіб автоматичного підтримання безперервного протитоку у похилих шнекових дифузійних апаратах
Номер патенту: 9102
Опубліковано: 30.09.1996
Автори: Ладанюк Анатолій Петрович, Лисянський Віктор Маркович, Негода Федір Валентинович
МПК: C13D 3/00
Мітки: автоматичного, апаратах, похилих, дифузійних, шнекових, спосіб, протитоку, безперервного, підтримання
Формула / Реферат:
Способ автоматического поддержания непрерывного противотока в наклонных шнековых диффузионных аппаратах по авт.св.№ 628172, отличающийся тем, что, с целью увеличения выхода сахара за счет улучшения качества регулирования, изменение подачи свежей стружки в момент скопления ее в аппарате корректируют в зависимости от уровня сокостружечной смеси в аппарате.
Попередній патент: Екструдер для приготування кормів
Наступний патент: Комутаційний фільтр середнього значення сигналу
Випадковий патент: Пересувний комплекс розвідки наземних цілей "барс"